
Abstract
Camera networks have been considered for a large set of visual monitoring applications. For some of them, cameras may be continuously monitoring scenes or groups of targets, but some events may trigger a critical level of visual monitoring, as in public security, industrial automation, and response to natural disasters. In such way, some critical events as a bomb explosion, a volcanic eruption, forest wildfire, or a car accident must be captured with high relevance, potentially helping when identifying responsibilities and during rescue operations. New relevance levels, which can be reflected in higher quality of transmitted images or video streams or even higher priority during transmission over the network must be quickly assigned to cameras that can view the critical events. In this work we propose a methodology to dynamically assign relevancies to cameras that view the area of critical events, employing scalar sensors and a decentralized decision mechanism. The resulting multimodal camera network can considerably enhance the critical surveillance in different monitoring applications. We propose some optimizations that exploit the monitoring relevance in such scenarios.
1. Introduction
In last decades, an increasing demand for surveillance applications has fostered the development of new monitoring technologies. In this context, camera networks for visual surveillance have been employed as an effective tool for applications in public security, industrial automation, and disaster monitoring, helping in the prevention, control, and criminal investigation when undesired events occur [1, 2]. Cameras can be embedded in resource-constrained sensors or in small computer devices, with different coding, processing, and resolution capabilities [3]. Moreover, they can be interconnected by wired or wireless technologies with different transmission characteristics. We define camera networks as any interconnected devices with visual monitoring capabilities, which retrieve visual information from the monitored field and deliver it to the network gateway (for processing or storage).
When monitoring a large area, hundreds or thousands of cameras can be deployed for surveillance [1, 2]. In usual operation, which we define as the period of time without the occurrence of any (critical) event of interest, cameras may retrieve visual information with standard quality. A standard quality level for all active cameras may lower the impact of visual data traffic over the network, which could reduce energy consumption, congestion, and packet corruption rate. Additionally, continuous transmission of high-quality visual data may waste database storage space. Transmission of low-quality images and video streams during usual surveillance may be even more necessary for wireless visual sensor networks (WVSN), since camera-enabled sensors are typically battery-operated [4]. Furthermore, during usual operation, the network may employ the same routing algorithm for all transmitted packets. In general words, when no relevant event occurs, all transmitted information is not like to be critical for the monitoring application, and thus they receive the same treatment by the network.
Frequently, a critical situation needs to be monitored with higher visual quality and the retrieved information needs to be delivered with lower end-to-end delay than usual transmission. In public security, for example, visual information can be retrieved by cameras scattered over a city, or more strictly for coverage of a sporting event or a public meeting. In this context, some critical event may occur in a specific region, that is, covered only by a subset of the deployed cameras. As a relevant example, during 2013 Boston Marathon, a terrorist attack detonated two bombs near the finish line. For a camera network monitoring the entire competition, cameras that can view the explosion area could receive higher priority as soon as the bombs exploded, which could be reflected in the quality of the retrieved visual information or in routing priority over the network. In other words, those cameras could be triggered to transmit still images or video streams with higher resolution and routers could drop packets from irrelevant cameras to prioritize packets originated from cameras with higher relevance.
Optimizations based on the sensing relevance of visual sensors can considerably enhance the performance of wireless visual sensor networks and general purpose camera networks, but this concept has already been proposed. In [5], we proposed a novel sensing relevance index to be exploited in cross-layer optimization mechanisms aimed at energy efficiency, reliability, flow control, and security in wireless visual sensor networks. In that work, the sensing relevance of each source node is computed according to the application monitoring requirements, and a central unit at the sink side is employed to support such computing. This QoE-based prioritization approach defines a global QoS parameter that can be exploited in many ways. Recently, we exploited this concept to propose different optimizations to reduce energy consumption in wireless image sensor networks, adapting the transmission frequencies of source nodes [6], the routing algorithm for time-critical transmissions [7] and the retransmission of corrupted packets [8].
The work in [5] provides a reasonable way to differentiate visual sensors according to their sensing relevance, but it may not be efficient in critical surveillance applications. The computing of the sensing relevance in [5] is performed by a central unit that may add undesired delay to the relevance assignment process when a critical event occurs. Moreover, the identification of visual monitoring relevancies is based on human decisions, visual coverage computation, or processing of visual patterns [5], which may be too slow when a quick response for a critical event is required.
In the occurrence of a critical event, as a bomb explosion, an overheating in a nuclear plant or a car accident, the cameras that can view the area of interest must be quickly assigned to a higher relevance level. Thus, we believe that the approach proposed in [5] is not efficient for critical surveillance applications. In such context, we propose an adaptive and decentralized approach for computation and assignment of monitoring relevance indexes. Moreover, we propose the use of scalar sensors in conjunction with surveillance cameras, defining a multimodal camera network. Employing scalar sensors for monitoring of information as temperature, pressure, radiation, and humidity may enhance the identification of a critical event, turning it faster when compared with processing of visual information or human intervention. In order to attest the expected benefits of the proposed approach, some practical usages of the computed monitoring indexes are presented. We believe that this innovative approach may considerably benefit critical surveillance applications.
The remainder of this paper is organized as follows. Section 2 presents some related works. Section 3 brings the statements and definitions of the proposed adaptive monitoring relevance approach. Some optimizations based on monitoring relevance indexes are presented in Section 4, followed by conclusions and references.
2. Related Works
Camera networks can be employed for a large set of monitoring functions. However, there are a lot of issues that need to be properly addressed, turning optimization of these networks into a relevant research topic. In fact, many investigations have been performed over different topics, as deployment, calibration, computer vision, energy efficiency, and data coding. Camera positioning and the resulting visual coverage of the network is indeed a high relevant topic and many works have been concerned with optimizations of the way cameras view the monitored field [2, 9]. Furthermore, investigations have been focused on the applicability of camera networks, focusing on tracking and surveillance applications [10, 11].
Although camera calibration and coverage optimization are relevant issues, we are more concerned in this paper with the transmission of visual data. In fact, camera networks or more strictly wireless visual sensor networks present many challenges due to the nature of the transmitted information. Even wired camera networks may face unacceptable levels of congestion and packet losses, when there are many cameras concurrently transmitting visual information of the monitored field. Some recent works have been concerned with different issues of visual data transmission in these networks, addressing prioritization as a reasonable approach to enhance the network performance.
Event-driven monitoring is a key function of camera networks. Frequently, the network will have a usual transmission pattern where standard or low-quality visual information will be transmitted from the sources to the network gateway. However, some critical event may trigger high-quality transmissions from the source nodes that can sense the desired event. Thus, the network may have to deal with transmission flows with different relevancies, where prioritization approaches can be employed to support high-relevant transmissions [12].
Optimizations based on data-relevance are an effective way to optimize the network with reduced impact on the monitoring quality. Usually, these optimizations will be concerned with some QoS parameter, as delay, jitter, throughput, packet loss and energy consumption [13, 14]. In [15] authors propose DWT-based image compression, where full reliable transmission is only required for high-priority data, according to the relevance of DWT subbands for reconstruction of the original images. The idea in that work is to reduce energy consumption throughout the path toward the sink. Similarly, the work in [16] proposes an adaptive reduction of energy consumption exploiting DWT image compression, achieving energy saving when adjusting the source coding rate and the error resilience scheme. DWT compression for image transmission was also exploited in [17], where high quality is only necessary for parts of the images with higher relevance for the application, leaving the remaining data with huge compression (and lower quality). In a different way, characteristics of video coding can also be exploited to optimize the network operation. In [18], multipath predictive-encoded video transmission is investigated in wireless sensor networks (WSN). In that work, two packet scheduling algorithms are proposed to be used when the aggregated bandwidth of the paths is lower than the transmission requirements of the applications. The proposed optimization discards less relevant frames in order to adapt the source transmission rate. Similarly, multipath routing is investigated in [19], where a cross-layer optimization mechanism based on predictive encoding is proposed. The solution presented in [19] defines a path priority scheduling algorithm, where packets containing more relevant data are assigned to paths with lower delay and higher bandwidth.
Besides optimizations based on the characteristics of the transmitted media, the relevance of sensor nodes may be considered when optimizing the network operation. The work in [20] proposed a priority-based congestion avoidance mechanism for wireless sensor networks. Nodes are assigned to a priority index according to their function or location. The idea is to assure that nodes with higher priority will get more bandwidth, providing weighted fairness in relay nodes. In [12], event-driven transmission flows are prioritized over query-driven and clock-driven transmissions, where prioritization is performed when allocating buffers in sensor nodes. A similar approach is proposed in [21]. In a different way, the work in [5] proposed the Sensing Relevance (SR) index, a global general-purpose priority index to be considered by source nodes and intermediate nodes for any type of network optimization. Each visual source node is assigned to a particular SR, which is computed based on the current application monitoring requirements. Such requirements are mapped in groups of relevance by a centralized entity (typically the sink). The groups of relevance are used by source nodes to locally compute a sensing relevance index, which can be exploited in many different optimization approaches [6–8].
Optimizations based on media coding bring significant contributions for general-purpose camera networks, but all cameras will have the same behavior. When performing visual monitoring over an area of interest, cameras may have different relevancies according to what is being viewing during a desired period of time. In fact, the work in [5] proposes an effective way to adapt any camera network to reflect the application monitoring requirements, but it may be inefficient for critical surveillance applications. When a critical event occurs, like an explosion during a popular meeting, more relevant packets must be quickly identified and prioritized by the network, as in [12, 21]. Exploiting the concepts of these different approaches, we propose a framework for general-purpose optimizations in camera networks exploiting the relevance of visual source nodes, in a different way of [12, 21]. Differently from [5], the proposed framework can very quickly adapt to the occurrence of critical events, assigning higher relevancies to cameras that view the affected area. For that, we define a decentralized sensing relevance assignment paradigm based on complementary scalar sensors, potentially benefiting critical surveillance applications.
3. Adaptive Monitoring Relevance
Surveillance is the monitoring of changing information. In fact, there are many scenarios where surveillance applications can bring significant results, as in public security, industrial automation, and natural disaster monitoring, just to cite a few. These three application scenarios were cited because they may present unexpected critical situations that need fast monitoring, fostering the development of efficient optimization approaches.
We envisage the use of cameras in conjunction with scalar sensors, composing a multimodal monitoring network. It may be a single-tier or multitier network [1], and the types of the employed cameras may vary considerably. In general, we expect that scalar sensors will be deployed always in conjunction with cameras, but not necessarily in the same device. Sensor motes with a single sensing unity may be deployed, or different sensing functionalities may be combined in a unique sensor. Whatever the case, we expect that scalar sensors will be deployed to provide information that can be used to deduce that a critical event has occurred, and the detection of a critical event will result in the assignment of higher monitoring relevancies for cameras that are in the same region of the scalar sensors. The use of scalar sensors in conjunction with cameras is not a novelty and there are many works that exploit this concept to compose multitier camera networks [1, 22, 23]. In a generic way, scalar sensors are employed to trigger transmissions of visual information, but we can employ those sensors to alter the current relevance of already active visual sources.
We expect that cameras and scalar sensors will be concurrently transmitting information to the gateway of the network, which may the sink in WSN or a router connecting to a different network. Also, they may be interconnected by wireless ad hoc links or wired connections. In the first case, a cluster-based topology may be employed, where the cluster head will receive traffic and forward it to one or more paths toward the sink [24]. For wired networks, routers may compose the network backbone. In both cases, there will be a device that will be closer to a subgroup of cameras and scalar sensors, referred as a monitoring cell, and such device will receive traffic from them. In the occurrence of a critical event, these central devices will assign a higher priority index to the visual source nodes of the monitoring cell.
Next subsections discuss the fundamental concepts related with the proposed approach for critical surveillance.
3.1. Monitoring Cell
We define that a camera network will be composed of M monitoring cells, a conceptual definition of a subarea of the network that has a particular monitoring scope for the surveillance application. For many camera networks, the monitored field may have regions with equivalent significance for the application, as for example, a room, a street, or a public square. If a critical event occurs in a monitored cell defined for a public square, as a bomb explosion, the visual sources in that area will retrieve information, that is, somehow related. And thus they must be assigned to higher relevance levels in order to retrieve high-quality visual information from the region affected by the critical event.
Each monitoring cell
In general words, a monitoring cell may be of any size and
Figure 1 presents an example of a wireless visual sensor network with five monitoring cells.

Monitoring cells in a wireless visual sensor network.
The control node of the monitoring cell will receive packets from scalar sensors and cameras and it will consider scalar information when detecting a critical event. That element will always relay visual data packets from the monitoring cell, but it may not relay scalar data packets depending on the application requirements, which may require only visual data from the monitored field.
The detection of a critical event will be performed employing scalar information retrieved from the monitored cell and thus the capability of the cell to detect such events depends on the number and configurations of scalar sensors. A scalar sensor
The K-coverage metric [26, 27] says that every point in the deployed region is within the coverage ranges of at least K sensor nodes. For a monitoring cell, a 1-coverage network indicates that, in the absence of node failures, any event inside the considered cell will be sensed by at least one sensor node. In other words, we can expect that any event inside the rectangle defined by
A 1-coverage monitoring cell.
Of course, we also desire that the network be at least 1-connected [28], indicating that the scalar sensors have always at least one active transmission path to the sink/gateway of the network. It was shown in [29] that if the communication range is at least twice the sensing range, a K-covered network results in a K-connected network.
Considering the planning of critical surveillance applications, a problem that arises is determining the area covered by a number of deployed sensors. In fact, the definition of a monitoring cell is conceptual and it does not depend on deployed scalar sensors. However, a monitoring cell may be badly covered. In such way, we may want to assess the coverage level of the monitoring cell, which may be reflected in the probability that a critical event will be detected. Moreover, we may want to determine the minimum number of sensor nodes and their configurations to assure that the monitoring cell is at least 1-coverage. Many mathematical formulations in last decade have addressed the coverage problem in WSN [25–27], bringing valuable contributions to our investigation. However, since camera networks may be composed of many monitoring cells, a common modeling problem is the border effect. This problem is resulted from the fact that sensor nodes near the border of the monitoring cell will cover less area than sensors placed midway [27], hardening mathematical formulations.
Scalar sensors may be deployed in a random or deterministic way, but it is common to consider in theory a random uniform distribution over the monitored field. Based on the formulations proposed in [27], we can compute the expected area collectively covered by the scalar sensors in a monitoring cell,

The estimated percentage of coverage of the monitoring cell by the scalar sensors can be achieved computing
Depending on the size of the monitoring cell and the number and configurations of the deployed scalar sensors, a 1-coverage configuration may not be achieved. The formulation in (1) can help when planning the surveillance application.
A monitoring cell
3.2. Critical Event
During the network lifetime a lot of events may occur and we expect that most of them will be detected by scalar sensors. However, some of those events may be critical for the application. We define a Critical Event (CE) as a critical or catastrophic event that occurs in a monitoring cell during the network operation and that must be monitored with high visual monitoring relevance. It may be a bomb explosion, a boiler overheating, a volcanic explosion, a car accident, a fire in a building, or any event that may cause significant damage to people and property. More specifically, a critical event has a high potential to cause loss of lives. When a critical event occurs, visual sources in the same monitoring cell will be assigned to the same relevance index, which may be exploited for prioritized transmission over the network.
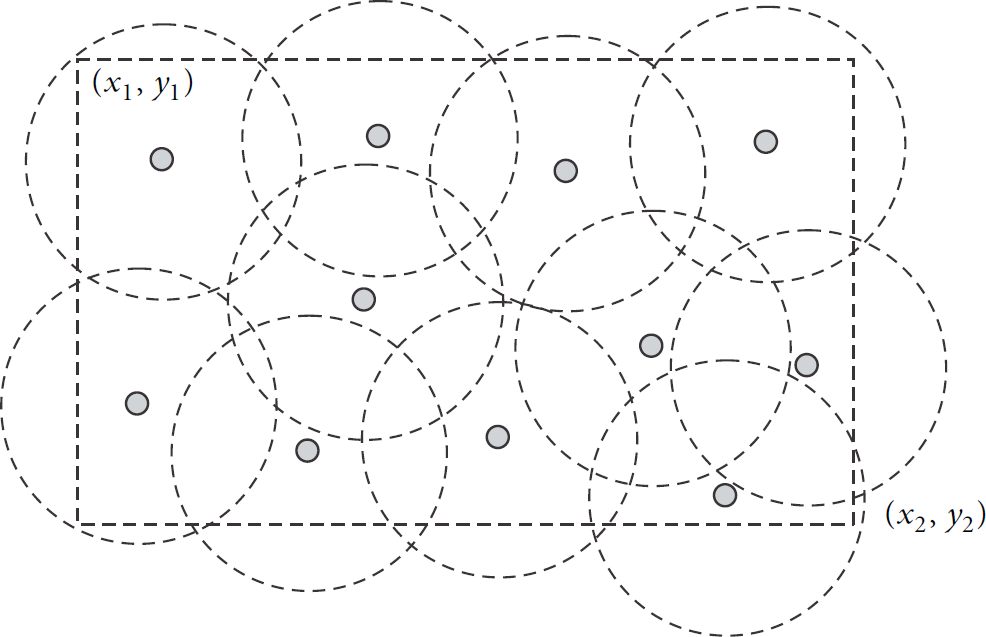
A critical event e will be manifested in an area defined as

Critical events in a camera network.
There are many ways to detect and identify a critical event. We consider that scalar sensors will provide information that can be indirectly used to detect a CE, employing a threshold-based approach. For that, a critical event e can only be detected if at least one scalar sensor can cover part of
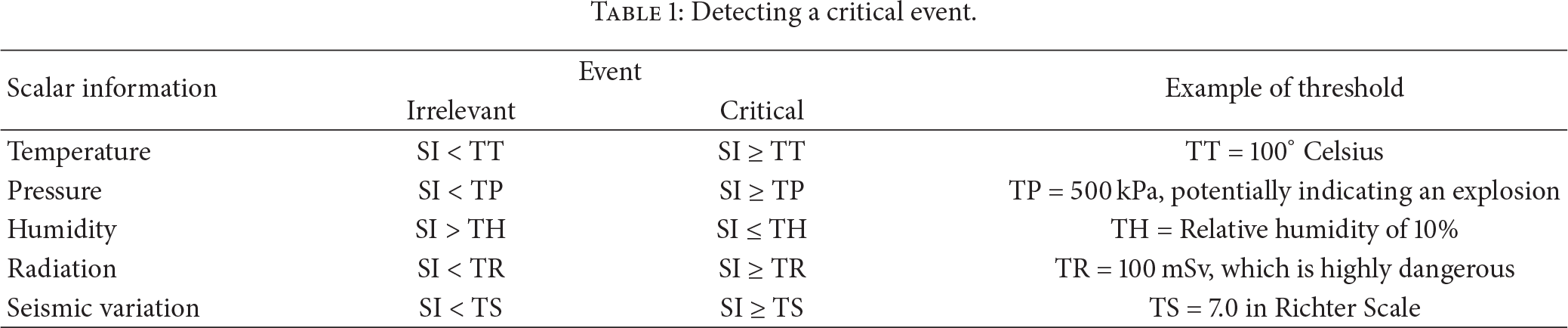
An event is detected exclusively by scalar sensors, but it is only identified as a critical event by the control node. We initially propose that one or more of at least five different types of scalar information will be considered when detecting and identifying a critical event, which are temperature, pressure, humidity, radiation, and seismic variation, but other types of sensors could be employed (e.g., smoke, toxic gases, and luminosity sensors). A critical threshold will be defined for each of them, depending on the type of surveillance that will be performed and the expected critical events for the target applications. For example, a bomb explosion may present a different temperature pattern when compared with an accident in a nuclear plant, and thus we cannot consider a unique temperature threshold for all surveillance applications. Hence, when monitoring a sporting competition, for example, the potential menaces must be previously accounted and the same is true for industrial automation. In spite of that, the same procedure is valid for all critical surveillance applications, since the only difference is the value assumed for the thresholds.
We define the Threshold for Temperature (TT), the Threshold for Pressure (TP), the Threshold for Humidity (TH), the Threshold for Radiation (TR), and the Threshold for Seismic variation (TS), which are valid for all monitoring cells of the considered application. A critical event is detected when at least one sensor report a scalar information (SI) that is above a predefined threshold (or below for relative humidity), as presented in Table 1. As scalar sensors will keep transmitting information even when an CE is detected, the monitoring cell will return to its standard operation (normal relevance) when all sensors report information lower (or higher for relative humidity) than all thresholds.
Detecting a critical event.
The thresholds must be preconfigured in the control node (routers or cluster heads) that belongs to each monitoring cell or broadcasted over the network using some specialized protocol. As these thresholds are expected to not change during the applications lifetime in most cases, we believe that previous configuration is more suitable for critical surveillance applications.
When a critical event is detected in a monitoring cell, the corresponding cameras must be quickly notified. The control node will compute a monitoring relevance index and broadcast it to all cameras in the monitoring cell, and thus all corresponding cameras will have the same monitoring index.
3.3. Monitoring Relevance
After identifying a critical event, a monitoring relevance index must be computed and delivered to all cameras in the corresponding monitoring cell. As we are proposing a decentralized relevance assignment approach, the control node will process the scalar information and will quickly assign relevancies to the cameras of the corresponding monitoring cell.
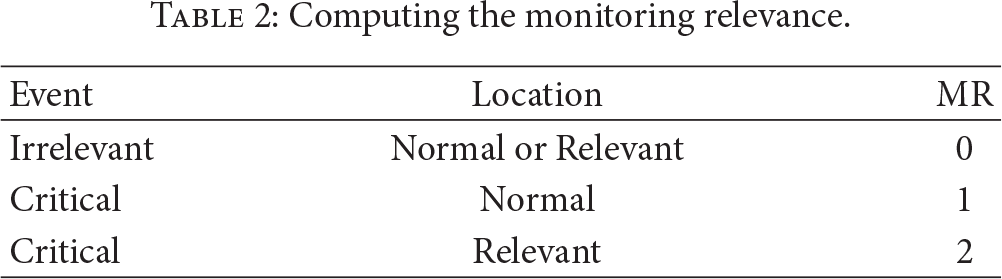
We define the Monitoring Relevance index (MR) as a 2 bit numeric value indicating the relevance of the transmitted information from the visual source (camera or visual sensor). As stated before, it is computed according to the occurrence of a critical event, but the control node also considers the location of the monitoring cell.
The computation of the monitoring relevance index is depicted in Table 2.
Computing the monitoring relevance.
After computing the monitoring relevance, the new MR must be delivery to all cameras of the monitoring cell. It may be broadcasted in control messages of MAC protocols, considering technologies as IEEE 802.15.4 or IEEE 802.11, or using specific application-layer messages. In order to facilitate the use of the proposed approach in generic networks, we defined the Monitoring Relevance Protocol (MRP) to support the broadcast of the computed MR.
The control node must deliver the computed MR index of the monitoring cell as soon as possible, employing the MRP. The Monitoring Relevance Protocol is indeed a very simple protocol that defines a single message, the Monitoring Relevance Notification (MRN). The MRN is a 24 bit message that is always transmitted by the element that computed the MR and it is always received and processed by visual sources. In this initial version, no acknowledgment message is required. Figure 4 presents the MRN message.

Monitoring Relevance Notification message.
The 2 bit field V represents the version of the protocol that is being considered. The current version is “00”. The second field is used to indicate the computed monitoring index, which is represented by 2 bits. As the possible values for MR may be extended in future versions of the proposed adaptive monitoring approach, there is a 4 bit reserved field (Res). At last, the 16 bit CRC is a cyclic redundant check used to verify if the received message was corrupted during transmission, where corrupted messages are silently dropped.
The first MRN message must be broadcasted immediately after the computation of a monitoring relevance index for the monitoring cell, in the reverse paths from the control node to the visual sources. In order to assure that all cameras will receive the new computed MR, new MRN messages must be transmitted every second, during 30 seconds. This initial time is crucial when monitoring a critical event and thus MRN messages must be broadcasted continuously. After that, new MRN messages may be broadcasted every minute, in the case new cameras are dynamically connected to a monitoring cell. If no scalar sensors report a SI that still triggers critical monitoring, the control node must return the MR index of the cell to the irrelevant level, but those nodes may consider a backoff of 1 minute or more to assure that the event is not critical anymore.
Scalar sensors will also receive MRN messages, but they must disregard the received messages.
The expected energy consumption when broadcasting MRN messages is very low, as can be assessed employing theoretical formulations. Based on energy consumption models on literature [15, 30] we know that the consumed energy to send and receive bits on a node h depends on the transmission power, 
The basic formulation defined in (2) is very simple, but relates the number of hops of the paths and the number of MRN messages with the average energy consumption. Although sleeping periods are not modeled in (2), which play an important role in real-world communications, we can expect low energy consumption when broadcasting MRN messages, especially after 30 seconds of delivering.
Figure 5 presents the expected cumulative energy consumption when broadcasting MRN messages in a monitoring cell. We define
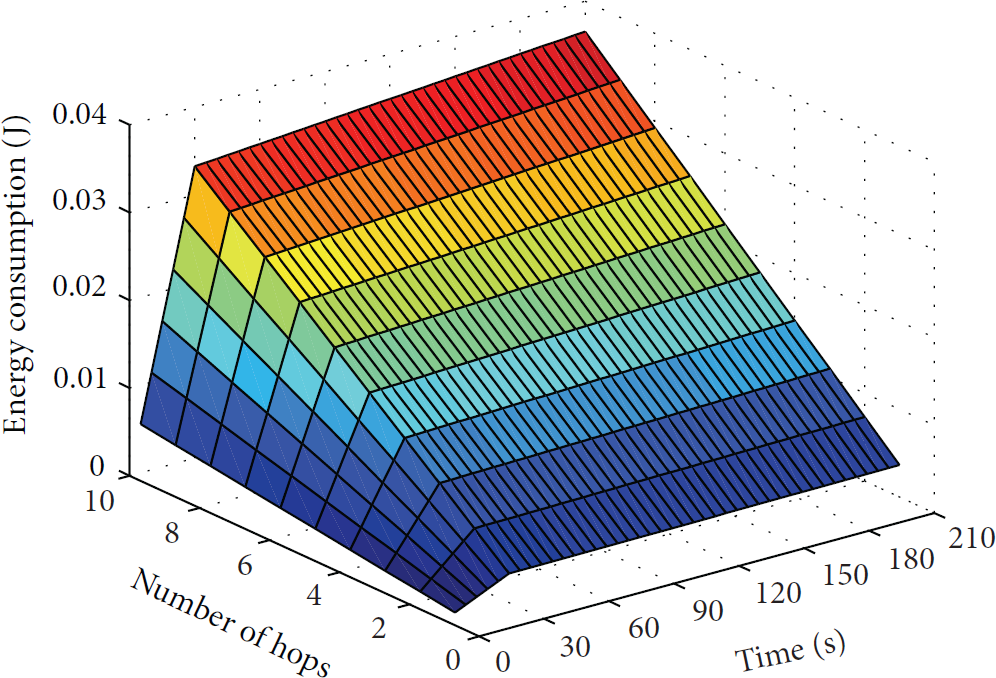
Average energy consumption when transmitting MRN messages.
Note that after 30 s the increasing in energy consumption is very low, since new MRN messages will only be transmitted every minute.
As defined before, a critical event e will have an area of
The MR of the monitoring cell will represent the relevance of the transmitted visual information for the surveillance applications. This information may be exploited in different ways, achieving different levels of network optimizations. For that, every visual data packet must include in its header the MR of its monitoring cell. Doing so, routers, switchers, or intermediate sensor nodes may differentiate incoming packets, assuring higher priority to visual data traffic from monitoring cells with higher MR. The value for MR may be included in the packet header just before the data payload, incurring in a very small additional overhead, or be used together with other QoS information (as the data coding relevance [17, 22]).
3.4. Relevant Issues When Employing the Proposed Approach
The proposed framework for adaptive monitoring relevance is centered on the definitions of monitoring cells. In fact, monitoring cells are defined according to the monitoring requirements of the application in terms of the regions to be monitored, instead of characteristics of the deployed sensors and transmission links. If we know, for example, that a monitoring cell will be defined to create a uniform monitoring scope for a room or a corner of a street, some questions may arise when deploying the network. In short, we may be concerned with the number of scalar sensors that should be deployed inside the monitoring cell in order to assure high confidence when detecting an event. Moreover, we may want to determine the current coverage level of the scalar sensors.
The formulation in (1) can be used to estimate the level of coverage in a monitoring cell, for a uniform distribution of scalar sensors. Figure 6 presents the results for a

Coverage for a
When the coverage level reaches 100%, the monitoring cell is assumed to be 1-coverage and any event that occurs inside the cell will be detected. From Figure 6, such configuration would be achieved when more scalar sensors with higher sensing range are deployed. However, for bigger monitoring cells, it will be harder to assure a 1-coverage configuration. Figure 7 presents the coverage level for a

Coverage for a
We may be also concerned with the fault tolerance of the network, requiring
Sometimes, the area of the monitoring cell will have a coverage level lower than 100%. Although this configuration may result in undetected events, the monitoring cell is still significant for the overall functions of the application and scalar sensors may very often detect a critical event. If
The number of cameras and scalar sensors in a cell may vary, where dense deployment is likely to provide higher levels of coverage. However, for large cells with very dense sensors deployment, event detection may be significantly delayed, especially when it occurs far from the control node. As a critical event must be quickly reflected in a higher monitoring relevance for visual sources in the monitoring cell, packets containing information sensed by scalar nodes should be transmitted with time constraints. In short, the coverage detection time depends on many aspects, as connection range, node deployment density, and employed MAC protocols, but techniques as data fusion will typically reduce the event detection delay [32, 33].
In real-world environments, unpredictable environmental noises can trigger false alarms and thus the control node may employ some strategy to deal with faulty events. For example, the control node may require scalar information from more than one scalar sensor to identify a critical event or request that the event is reported during some time until it may be reliably identified. However, as we desire quick response to a critical event, such strategies must be properly designed to not prejudice the application requirements for critical surveillance.
As a last comment, mechanisms to compute optimized number of clusters in a wireless sensor network may be employed when selecting the control node [34]. In fact, a monitoring cell may be composed of many clusters where a single cluster head will be selected as the control node (the one that relays packets from all nodes of the cell). However, for large monitoring cells, packets may be connected to the network through more than one node, what may lead us to define more than one control node. In a general way, more than one control node may be defined as long as they can broadcast MRP messages to all visual sources of the cell. If the scope of significance defined by the monitoring cell is respected, we can employ different approaches when defining control nodes.
4. Exploiting the Monitoring Relevance Index
When a critical event is detected in a monitoring cell, every camera and visual sensor will be assigned to a new monitoring relevance index through broadcasted MRN messages. The MR represents a priority index of the monitoring cell and higher values of MR should result in a higher overall quality for the transmitted information. In fact, the monitoring relevance concept may be exploited in different ways to optimize the transmission of visual information, in wired camera networks or wireless visual sensor networks, achieving higher quality in different stages of the communication.
Next subsections present some useful examples of practical exploitation of the monitoring relevancies in camera and visual sensor networks. A camera network may implement only one optimization mechanism or two or more approaches may be composed to form a more complex optimization solution. Whatever the case, many other possibilities may be envisaged to achieve higher quality when monitoring cells are differentiated by their current monitoring relevance.
4.1. MR-Based Transmission
During ordinary monitoring (when no critical event has occurred), camera and visual sensors may be transmitting visual information with low or average quality. Doing so, energy is saved over the network, when resource-constrained wireless visual sensor networks are deployed. If energy is not a relevant optimization issue, transmission of low-quality data may reduce the demand for database storage space. In short, if what is being viewed is not critical, the transmitted visual information may have only an (low) acceptable quality when reconstructed.
In the occurrence of a critical event, visual data with high quality (e.g., with high resolution, compression efficiency, and transmission frequency) should be transmitted, since it may be relevant in rescue operations, crisis management or criminal investigation. Moreover, redundant inactive cameras might be turned on and start transmission, enriching the monitored information.
There are many ways to optimize the transmitted information based on the monitoring indexes. A reasonable possibility is employing different coding algorithms depending on the assigned MR. Table 3 presents a mapping between the MR index and the coding algorithm, but many other configurations may be defined according to the surveillance application requirements.
Visual data coding according to MR.

For higher values of MR, visual sources will transmit data with higher quality, as presented in Table 3. For example, while for
Instead of selecting different coding algorithms and configurations according to the MR index, we can also exploit the different relevancies of data produced by the employed codec. Video streams and still images can be processed by coding algorithms that produce data with different relevancies for the reconstruction of the original media, as in [15–17]. Table 4 presents a mapping between MR indexes and coding quality, but now exploiting the characteristics of DWT [15–17] and MPEG-4 [35] coding techniques. Doing so, cameras in higher relevant monitoring cells will transmit visual data with higher quality. In general, exploiting the relevancies of parts of the encoded data, as presented in Table 4, may be more energy-efficient than considering different full-quality coding techniques, as in Table 3, but the perceived quality is lowered.
MR index associated to parts of the encoded visual data.

We assessed the energy consumption when exploiting the MR indexes in wireless visual sensor networks. For that, the Castalia simulation framework [36] was considered for simulations of transmissions from three different visual source nodes with different MR indexes. Castalia is a C++ discrete-event simulator based on the OMNet++ platform.
Figure 8 presents the energy consumption for a transmission path composed of 10 intermediate nodes uniformly distributed, where the distance between neighbor nodes is 10 m. The employed MAC protocol is T-MAC [37], a duty-cycle protocol that defines dynamic sleeping periods for higher energy efficiency. We consider that visual sources transmit a single 8 bit uncompressed grayscale

Energy consumption according to the monitoring relevance index.
When transmitting fewer DWT subbands, the quality of the received images will be lowered. Figure 9 presents an example of received images from cameras with different MR indexes. Note that the expected quality of received images when a critical event is detected (

Quality of received images at the destination.
4.2. Delay-Aware Routing
Generally, critical surveillance applications may be composed of conventional wired cameras or resource-constrained wireless visual sensors. In these applications, when a critical event is detected and a new MR is assigned to the visual sources, still images or videos streams will need to be delivered as soon as possible to the gateway, for instant visualization, storage or processing. In such context, there may be many active transmission paths from the monitoring cells to the gateway, each one with particular characteristics in terms of residual energy and average end-to-end delay.
Transmission delay may be originated from different aspects of communications, as the network interface functioning, the wireless radio operation, the MAC protocol, the congestion control approach, the error recovery mechanism, and the transmission rate. Moreover, for wireless visual sensor networks, nodes may employ duty-cycle MAC protocols, which add sleeping times into the radio operation [37]. During sleeping time the node is unable to process or relay packets, increasing the end-to-end communication delay. Such complex scenario is hard to formulate, pushing us to adopt some level of simplification.
We assume that each communication link l in any path p will have an average end-to-end delay of 
For a network or subnetwork composed of n routing paths p,
Estimating the expected end-to-end delay through the number of links that compose the paths is a reasonable simplification, but more complex delay estimative may be adopted. In fact, dynamic delay measurement approaches could be employed to monitor the characteristics of the links, automatically adapting the routing strategies [34, 37, 38].
In order to allow quick reception of visual data transmitted from monitoring cells with higher monitoring relevance, paths with lower end-to-end delay should be exclusively employed for transmission of visual data packets with higher MR. Besides potential reduction of the communication delay, the transmission flow in links that compose the paths with lower expected delay will be diminished when avoiding transmission of packets with low relevance (
Initially, if the total required transmission bandwidth for packets with
In the case there is no critical event, all monitoring cells will be transmitting visual information with
We assume that transmission paths are established using some routing protocol [39]. Moreover, we expect that the routing protocol may provide information of the number of hops of the paths, indirectly estimating the average end-to-end delay [40], but dynamic approaches may be also considered [41–43].
Figure 10 presents a graphical example of a small heterogeneous camera network deployed for critical surveillance. There are two different monitoring cells that are both connected to the gateway (sink) through three different transmission paths. Each monitoring cell has three active visual sources, which are initially transmitting visual information with

Camera network deployed for critical surveillance.
We estimated the traffic load on path 1 according to different transmission configurations for the visual sources, in the occurrence of a critical event. Every transmission path has an available transmission bandwidth of 1 Mbps and the transmission rate of every visual source ranges from 50 kbps to 300 kbps.
In order to compare the proposed routing approach with a MR-unaware algorithm, we considered a fair load balance strategy that route packets according to the “weight” of the paths, where paths with higher expected end-to-end delay receive less traffic. Hence, according to (3), if, 
For this fair load balance mechanism, when
Figure 11 presents the percentage of occupation of path 1 in Figure 10, considering traffic from the two monitoring cells. In that graphic it is presented the percentage of occupation when no critical event has occurred (

Traffic load in path 1 from all monitoring cells.
When a critical event is detected in monitoring cell 2, path 1 (lowest expected end-to-end delay) will receive only the transmitted packets from that cell. It is the best configuration when a critical event needs to be monitored in monitoring cell 2. On the other hand, when there is no critical event (

Traffic load in path 1 from monitoring cell 2.
As one can see in Figure 12, the proposed approach assures that most relevant packets are routed through paths with lower end-to-end delay, potentially bringing significant contributions for critical surveillance applications. Note that when both cells are monitoring different or the same critical event, all available bandwidth in path 1 will be considered (for
We believe that the adoption of the concept of monitoring relevance as a prioritization parameter for packet routing can assure that more critical visual information for the surveillance application will reach the destination with lower average delay.
4.3. Congestion Avoidance and Packet Prioritization
Sometimes, the current processing capability of routers or cluster heads may be insufficient to process the incoming packets. Additionally, the available transmission paths may be overloaded. In both cases, congestion may cause packet dropping, potentially degrading the quality of the reconstructed visual data at the destination and disrupting the viewing experience. For critical surveillance applications, packets transmitted from monitoring cells that are viewing critical events are highly relevant, and packet dropping in congested nodes should be reduced as much as possible. One should note that it may be hard to predict congestion, especially when idles nodes suddenly wake up and increase the overall transmission rate, which may happen when a critical event is detected in a monitoring cell.
There are some mechanisms to mitigate congestion, where the reduction in the source transmission rate is the most usual approach. However, while nodes are congested and the congestion cause is not solved, data packets may be dropped, potentially impacting the application quality.
We designed a MR-based packet processing mechanism where every router or intermediate node implement a receiving queue to temporarily store incoming packets for processing and routing. When the packet arrival rate exceeds the packet service rate, incoming packets will be inserted in the receiving queue, waiting for processing. However, if such condition remains and the queue becomes full, new received packets will be silently dropped. We propose that packets will be selected for discarding in congested nodes according to the value for MR inserted in every transmitted visual data packet.
When a new packet reaches an intermediate node with a full receiving queue, an algorithm will be employed to replace a lower relevant packet in the queue by a newly incoming higher relevant packet. The receiving queue might be sorted, with average complexity of
We evaluated the proposed packet prioritization approach considering transmissions from three monitoring cells. A reader/writer simulator was designed and implemented to estimate the percentage of packet loss. In that program, the packet arrival order is scrambled and only the average results after 10 consecutive tests are considered. The congestion is obtained when the packet arrival rate exceeds the packet processing rate and the simulation is performed considering this ratio ranging from 1.2 to 3.0.
In Figure 13 we present the percentage of packet loss from monitoring cell 1 when a router has a reception queue for 40 packets and a burst of 300 packets is received (100 packets from each monitoring cell). We simulated a MR-unaware algorithm where all packets have same relevance, as long as a MR-based prioritization approach where packets from monitoring cell 1 have

Packet loss in transmissions from monitoring cell 1.
As expected, when the monitoring relevance index is considered for packet prioritization in congested nodes, high-relevant packets are more likely to be preserved, potentially reducing the impact of congestion over the quality of the reconstructed visual data.
5. Conclusions
Visual surveillance networks have been employed for a lot of monitoring applications. For some of them, critical events need to be monitored with high relevance, helping in rescue operations, crisis management, and criminal investigation. Mechanisms to assign such relevancies and exploit them for network optimizations may bring significant results for critical surveillance applications.
In this work, we have proposed a decentralized mechanism based on monitored scalar information for quick assignment of monitoring relevance indexes. The general procedures to assign the relevancies and a generic application-layer protocol were described. Moreover, we proposed three optimization mechanisms that exploit the concept of monitoring relevance. Some initial results were described to attest the expected benefits of the proposed approaches.
This work is not concluded yet. New investigations will be focused on experimental verifications of the detection of critical events. We want to precisely measure the time for assignment of a new MR inside a monitoring cell. Additionally, we aim at specifications of new optimization mechanisms. Among the possibilities, the monitoring relevancies could be considered to dynamically optimize the Field of View of Pan-Tilt-Zoom (PTZ) cameras.
The proposed monitoring relevance concept can play an important role in near future camera networks, especially when critical events may occur in a monitored area. We believe that the presented results are a first step in this direction.
Footnotes
Acknowledgment
The authors would like to acknowledge the support of research agency FCT (project ref. PTDC/EEA-TEL/104185/2008), that partially funded this work.