
Abstract
Emergency vehicle is an important part of traffic flow. The efficiency, reliability, and safety of emergency vehicle operations dropped due to increasing traffic congestion. With the advancement of the wireless communication technologies and the development of the vehicle-to-vehicle (v2v) and vehicle-to-infrastructure (v2i) systems, called Cooperative Vehicle-Infrastructure System (CVIS), there is an opportunity to provide appropriate traffic signal preemption for emergency vehicle based on real-ime emergency vehicle data, traffic volume data, and traffic signal timings. This paper describes the design and implementation of an Emergency Vehicle Signal Preemption System (TJ-EVSP) in CVIS environment. The system function, system architecture, and operation strategies were presented. Then, the system was deployed and validated at two adjacent intersections in Taicang City, Jiangsu Province, China. Results show that the proposed system can improve the efficiency of emergency vehicle operations with less waste of traffic resources.
1. Introduction
The efficiency, reliability, and safety of emergency vehicle operations are critical for saving lives and reducing property losses. It is necessary to ensure that emergency vehicles can respond to emergency calls for an incident with a minimum delay when the traffic is congested.
Traffic signal control is an effective method to regulate traffic flow and improve traffic safety, which can also effectively reduce the traffic congestion [1]. However, traffic signal control sometimes results in some delay of emergency vehicles. For example, considering a situation that a long queue of normal vehicles blocking the way during red light, emergency vehicles might not move easily though they are permitted to cross the intersection against a traffic signal. Moreover, due to some distractions such as road noise, audio systems, and hearing impairment, although the emergency vehicle can alert other drivers that it intends to cross the intersection by warning siren and flashing lights, other drivers will often not be aware of the warning information being emitted by the approaching emergency vehicles, thus resulting in a dangerous situation. In general, emergency vehicle delay and safety are main concerns at intersections; it is necessary to provide the emergency vehicles with preemption signal in traffic control.
With the rapid development of information and communication technologies, advanced technology-founded design in the implementation of traffic engineering has become an effective way to address some problems that used to be expensive or even impossible to solve. In a previous publication [2], a proof of concept for a prototype of Tongji Cooperative Vehicle-Infrastructure System (TJ-CVIS) developed at the University of Tongji was presented, which provides a vehicle capable of communication with other vehicles and infrastructure. In this paper, a Tongji Emergency Vehicle Signal Preemption System (TJ-EVSP) is proposed, which is derived from the four-year project (12/2009–12/2013) of TJ-CVIS supported by the Chinese Government.
The remainder of this paper is organized as follows: Section 2 reviews the research and implementation of Cooperative Vehicle-Infrastructure System (CVIS) technology and emergency vehicle signal preemption system around the world.Section 3 introduces the architecture of TJ-EVSP, including the hardware and software architectures. Section 4 describes the operation strategies of TJ-EVSP, including Red Truncation and Green Locking. Section 5 evaluates the proposed TJ-EVSP through field experiments conducted in a real-traffic environment in Taicang city, Jiangsu Province, China. Section 6 provides the conclusion and recommendations for future research.
2. Literature Review
The failure of the traveling public to yield the right-of-way to the approaching emergency vehicles at intersection is the common cause of delay and emergency vehicle crashes [3, 4]. Previous works of emergency vehicle priority operation mainly focused on Emergency Vehicle Alert System (EVAS) and Emergency Vehicle Preemption (EVP).
EVAS was developed to provide additional time for the traveling public to react appropriately in order to avoid conflicts with emergency vehicles at urban intersections; the evaluation of an EVAS in the City of Dearborn Heights, Michigan, showed that driver compliance to emergency vehicle warning increased from 76.6 percent to 97.4 percent after the installation of EVAS [5].
EVP is another approach to improve the efficiency and reliability of emergency vehicles. For an approaching emergency vehicle, a green signal is given to provide safe passage through a signalized intersection during emergency runs. In the 1970s–1980s, the traffic signal preemption systems for fire trucks were deployed in Liverpool and Northampton, UK [6, 7], reducing the travelling time by about 10%. Vincent and Cooper [8] evaluated five types of signal priority rules, including the combination of green light extending, red light cutting off, and restoration rules at isolated intersection. Since the single-intersection based strategy is limited by local detection, Kwon and Kim [9, 10] proposed the route-based signal preemption strategy and evaluated the strategy by VISSIM simulation, which improved the efficiency of emergency vehicle operation. In general, past research has shown that EVP provides savings of up to 45 seconds in intersection delay per run at high volume intersections and average reductions of 14 to 23 percent in total emergency vehicle response time [11].
Beside the aforementioned theoretical studies, several EVAS and EVP systems were implemented around the world. 3 M Opticom Priority Control System [12] utilizes infrared emitter and detector to detect the approaching emergency vehicle, minimizing response time, and maximizing safety. An Emergency Vehicle Intersection Early Warning System (EViEWS) [13] was developed in the US, utilizing microwave communication and variable message signs to enhance the safety of emergency vehicle operations, and had begun installation of EVP and traffic control systems in Harris County, Texas, in the year of 2008. The Japanese EVP system known as Fast Emergency Vehicle Preemption System (FAST) [14] realized two-way communication between vehicle and infrastructure by infrared detectors; the information of approaching emergency vehicle can be transferred intersection by intersection; thus, the downstream controller can adjust the traffic signal to provide emergency vehicle with right-of-way in advance. Other common traffic control systems such as SCOOT [15] and SCATS [16] had also introduced EVP into control strategies.
Although significant studies have focused on the emergency vehicle operation, the past preemption method, especially traffic signal preemption for emergency vehicles, cannot respond to the variation of traffic flow efficiently, due to the limitation of the conventional techniques for traffic information collection and communication. An effective timely solution for emergency vehicle signal preemption en route relies on immediate and high resolution data of the traffic arrivals, which becomes increasingly available in recent years. For example, Connected-Vehicle [17] in USA, Cooperative Vehicle-Infrastructure Systems (CVIS) [18] in Europe, and Vehicle Information and Communication System (VICS) [19] in Japan have been launched and partly completed. In this study, the proposed TJ-EVSP is derived from the Tongji Cooperative Vehicle-Infrastructure System (TJ-CVIS) developed at the University of Tongji, Shanghai, China [2]. Compared with past EVP researches, TJ-EVSP develops some unique features which are summarized in Table 1.
Differences between past EVP researches and TJ-EVSP.

3. System Architecture of TJ-EVSP
3.1. Overall System Architecture
TJ-EVSP is constructed at Taicang City, Jiangsu Province, to develop EVP and EVAS scenarios based on CVIS technology. Our system aims to improve the emergency vehicle operation efficiency with less traffic delay. From the viewpoint of structural mechanics, TJ-EVSP consists of three layers: perception layer, interaction layer, and application layer [20]. Figure 1 illustrates the overall system architecture of TJ-EVSP.

Overall system architecture of TJ-EVSP.
The perception layer represents the physical layer, which corresponds with Open System Interconnect (OSI) Layer 1. The interaction layer represents the link layer, which contains the communication protocols and other communication technologies. The top layer-application layer includes software development, field test, and validation. In this paper, the applications of Signal Preemption, Emergency Warning, and Guidance are deployed.
3.2. Hardware Architecture
The hardware system of TJ-EVSP mainly consists of two components, On Board Unit (OBU) and Road Side Unit (RSU).
3.2.1. OBU
The OBU is mainly composed of control processor, visual and audible user interface, GPS receiver, wireless communication device, and antenna. Vehicles equipped with the OBU will be wirelessly linked and exhibited 360-degree awareness through communication with other vehicles. Notebook, DSRC (Dedicated Short Range Communication) devices, touchscreen, OBD (On Board Diagnostic) interface, and so forth are installed inside the vehicle; the GPS receiver and omnidirectional DSRC antennas are installed on the roof of vehicle. Both the emergency vehicles and normal vehicles are equipped with the same OBU hardware. Some other telemedicine equipments are also installed on the emergency vehicle and can share the 3G communication with OBU. The architecture of OBU is shown in Figure 2 (a).

Hardware architecture.
3.2.2. RSU
The RSU consists mainly of a traffic signal controller, DSRC device, and control computer. Control computer is used for monitoring the messages from emergency vehicle and the traveling public, determining whether a vehicle issuing a preemption request is within an allowed approach of the intersection, and determining when and how to adjust the signal phase. The control computer is located at the intersection and it can send command messages to control computers at other intersections by local area network. The signal controller can receive the signal change-over command from the control computer and then adjust the traffic light accordingly to provide the right-of-way for the emergency vehicle en route. The architecture of OBU is shown in Figure 2 (b).
3.2.3. Wireless Technology
DSRC and 3G technologies are both used in TJ-EVSP. Since TJ-EVSP is based on CVIS environment, unlike some other communication systems, CVIS requires a DSRC with very low latency (typically less than 100 ms) and packet error rate (PER) (typically less than 5%). Thus, a communication protocol which supports these strict requirements is required. IEEE 802.11p is considered as the first choice of DSRC in TJ-EVSP, because it provides low latency and supports data exchange between high-speed vehicles and infrastructure. In addition, a WCDMA (Wideband Code Division Multiple Access) based 3G service is used to transmit information to control center.
3.3. Software Architecture
Both Linux and Windows platforms are used in TJ-EVSP to develop applications. The overall software architecture is shown in Figure 3.

Overall software architecture.
Application of DSRC communication is implemented on a Linux embedded platform. GPS, vehicle and radio data can be obtained through peripheral interfaces. Embedded Linux is mainly used to process underlying data, and the Windows OS is used to develop higher level applications such as guiding application, signal preemption application, and emergency warning application.
A map-based module is developed in Microsoft Visual Studio under Windows platform using GMap.NET [21]. GMap.NET is a powerful, free, cross-platform, open source NET control. We employ it to enable use routing, geocoding, and maps from Google, Yahoo!, Bing, ArcGIS, and other maps in Windows Forms and Presentation.
In TJ-EVSP, the message format of normal vehicle has already been specified [2], which mainly includes the following contents:
GPS data (longitude, latitude, altitude);
GPS correction message;
vehicle ID;
traveling speed;
current date and time.
For the emergency vehicle, traveling route and preemption request message are added into the message contents. Considering that almost all the normal vehicles on the road have not been equipped with the OBU of TJ-EVSP at present, we introduced the loop detector data into the TJ-EVSP to learn the traffic status of each intersection during emergency runs.
4. Operation Strategies of TJ-EVSP
In CVIS environment, immediate and high resolution data of vehicle's position, heading and velocity can be utilized to determine when and how to adjust the signal phase. In this section, the operation strategies of TJ-EVSP including Red Truncation and Green Locking are introduced.
4.1. Dynamic Signal Preemption Procedure
In TJ-EVSP, the OBU on emergency vehicle is always emitting the emergency preemption request en route. The software on RSU processes the request and provides a priority green light through normal traffic operations for the approaching emergency vehicle. The preemption procedure should subject to the particular situation of each emergency vehicle running. LetT E represent the expected travel time of EV from current position to the intersection, and letT Q represent the estimated clearance time of the normal vehicles (stopped or in a continuous flow) in front of EV. To ensure that EV will get through the intersection with nonstop and no speed decrease, and to avoid too much green loss at the same time, the ideal relationship of T E and T Q should subject to the following equation:

In (1), tε indicates the transitional period time, which consists of traffic signal switch time and a headway in a free-flow condition. In TJ-EVSP, if the traffic signal needs to be switched, tε is assigned as 9 seconds, consisting of yellow-flash (3 seconds), all-red time (3 seconds), and time headway (3 seconds). To facilitate the presentation, all definitions and notations used hereafter are summarized below:
L E : EV distance to intersection when request received;
V E : expected speed of EV, subject to the road level;
N: number of normal vehicles in front of EV;
V Q : queue tail travel speed;
L Q : distance from stop line to queue tail;
Δt: extra time before preemption command executed;
T min : minimum time length for signal phase insertion, subject to the minimum signal cycle of particular intersection;
T max : upper boundary value of time for signal phase insertion, subject to the conventional signal cycle of particular intersection;
C: signal cycle;
C min i : minimum length of Stage i in the signal cycle;
Cins i : time length of Stage i in the inserted signal cycle;
t i : accumulated time from start of Stage i in current cycle;
f(N): function for determining T Q .
The schematic representation of signal preemption determining is shown in Figure 4.

Decision tree of signal preemption procedure.
4.2. Red Truncation Strategy
Since EV is permitted to cross an intersection against traffic signal, the major factor that is obstructing the passage of EV is not the red light, but the normal vehicles waiting at intersection for green light. As shown in Figure 5 (a), although EV can meet a green signal when crossing the intersection, EV may decelerate due to the queue. If the current signal for the approaching EV is red, it is necessary to give an early green signal to clear the waiting vehicles in front of EV (Figure 5 (b)). Too early or too late to execute Red Truncation command will result in green loss (Figure 5 (c)) or speed decrease of EV (Figure 5 (d)).

Red truncation scenarios.
According to the preemption procedure shown in Figure 4, the first step is to calculate T E :
When deploying TJ-EVSP in Taicang City, we sampled and analyzed the ambulance speed in different road conditions. V E is determined by:
number of lanes: 1 2 ≥3
V E (km/h): 40 60 80
The next step is to estimate the clearance time of normal vehicles in front of EV:

Considering that not all normal vehicles on road are equipped with OBU, the status of each vehicle in front of EV cannot be collected timely. We conservatively hypothesize that all the vehicles in front of EV are stopped, waiting in a queue. Admittedly, when the queue begins moving forward, the acceleration process of each vehicle varies with queue position, vehicle type, and driving behavior. To simplify the acceleration model of the queue, the queue tail travel speed, V Q is applied here. In addition, the distance from stop line to queue tail, L Q is introduced as instrumental variable:
In (4),
Consequently, Figure 6 describes the relationship between L Q and V Q on the basis of vehicle probe data we collected by TJ-EVSP OBU in real-traffic field test. “Speed” in Figure 6 shows the travel speed of the queue tail vehicle since starting up, until passing the stop line. In the implementation of TJ-EVSP, we use (5) to determine V Q and then calculate T Q and Δt:



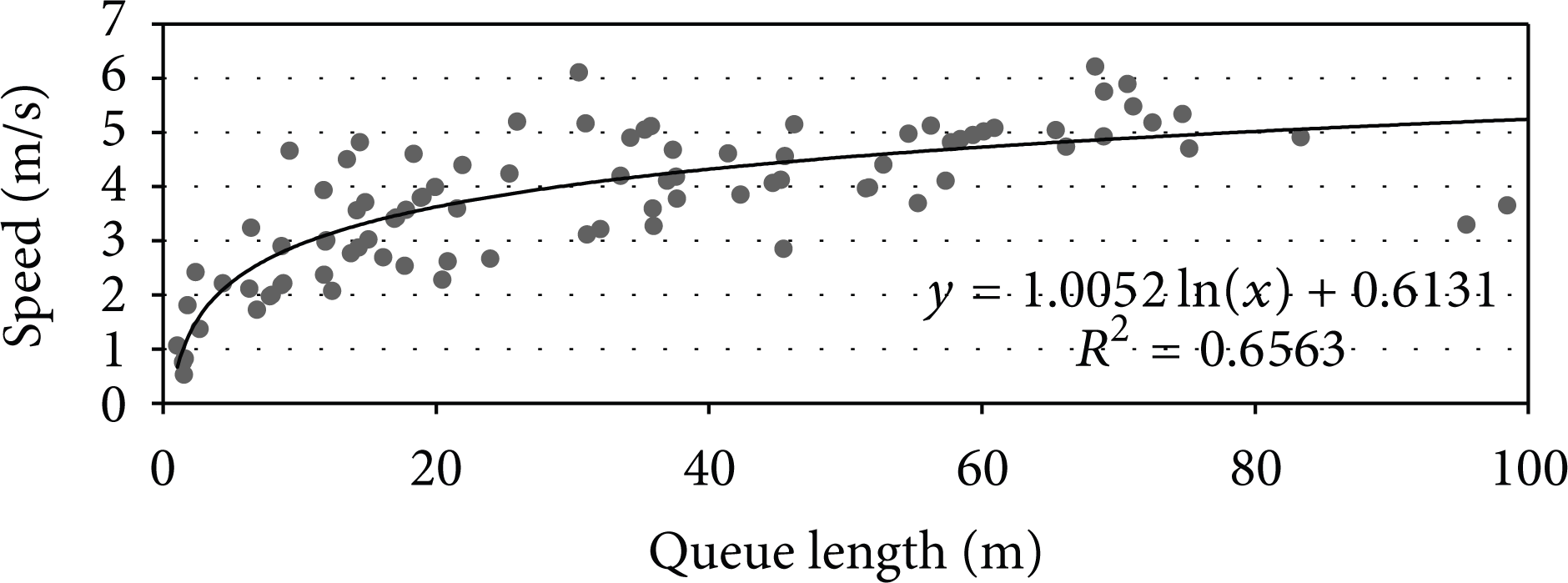
L Q -V Q relationship.
If Δt ≤ 0, Red Truncation will be executed immediately, or the preemption command will be executed after time Δt, unless the traffic status changes.
4.3. Phase Insertion and Green Locking Strategy
Beside Red Truncation, if the current signal for EV approaching direction is green, it may need to be locked until EV crosses the intersection. On the other hand, irrational Green Locking may result in bad influence to the traveling public. Figure 7 (a) indicates the scenario of irrational Green Locking, which locked the green light too early and results in too much green loss. Hence, inserting a phase before Green Locking is taken into account (Figure 7 (b)).
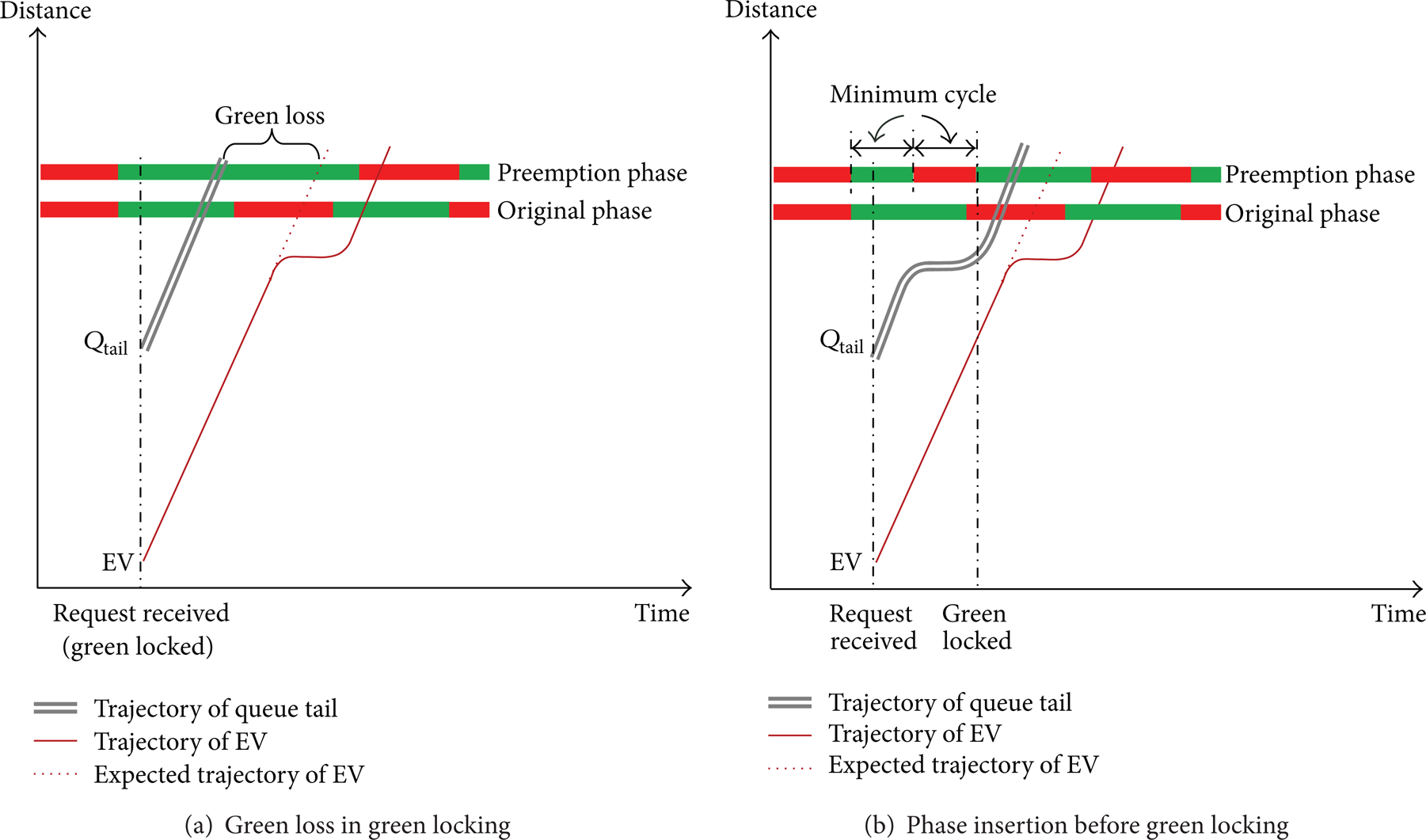
Green locking scenarios.
For a given cycle, the strategy when to lock the current signal should depend on the status of approaching EV, traffic flow, and current signal. According to the preemption procedure shown in Figure 4, threshold value T min and T max for signal phase insertion are introduced (e.g., current signal stage index: k):

If Δt ≤ T min , it indicates that the extra time is not enough for phase insertion, current signal should be locked immediately until EV crosses the intersection; if Δt ≥ T max , it indicates that EV is too far to make a decision, and the system will stay in routine operation and waiting for updated traffic data; if Δt is between T min and T max , phase insertion should be executed before locking the green light. The extra time will be allocated to each signal stage in proportion.
The remaining time length for current stage is

The inserted time length for other stage is

4.4. Other Strategies
4.4.1. Signal Restoration
Once EV has crossed the intersection, a signal restoration message will be sent from EV to RSU. For a signal control cycle with n stages, if the traffic signal before preemption is in Stage i and the preemption signal is in Stage k, the signal restoration procedure is described as below.
Step 1. Restoration message received, go to Step 2.
Step 2. Stage k keeps running, t k = t k + 1, go to Step 3.
Step 3. If t k ≥ C min k , go to Step 4; else go to Step 2.
Step 4. Signal change to Stage i + 1 (or Stage 1 in case of i = n), restoration completed.
4.4.2. Multiintersections Preemption
In TJ-EVSP, we also took multiintersections preemption into account to avoid spillback between two adjacent intersections. In the multiintersections preemption scenario, the RSUs of adjacent intersections j and j + 1 are connected, and they can share the data of EV and traffic volume. Before EV enters the road section between intersections j and j + 1, the estimated clearance time of the normal vehicles for intersection j + 1 is calculated by

In (11), η j indicates the turning proportion on EV heading. By following the procedure shown in Figure 4, TJ-EVSP can provide a priority signal with EV at intersection j + 1 in advance.
5. Field Test and Validation
In this section, basic characteristic tests about performance of DSRC and GPS are discussed referring to [2], and then the field test of TJ-EVSP in the Taicang City on active public roadways is introduced.
5.1. Basic Characteristics
In a CVIS based emergency vehicle preemption scenario, real time exchange is necessary since high-speed vehicles will travel long distances in a short time. Data monitoring requires a DSRC with very low latency (typically less than 100 ms), packet loss rate (PLR), and packet error rate (PER) (typically less than 5%). Previous study [2] has indicated that communication in TJ-EVSP meets the basic requirements. It is also shown to support low latency and high reliability. The features discussed above indicate that the communication is qualified to be applied in the CVIS-based emergency vehicle preemption.
Also in Yang et al. [2], the field test results of communication performance and position performance indicate that TJ-EVSP can provide a lane-level position service for the vehicle and control system with high message transfer reliability, which enable the feasibility of preemption strategies.
5.2. Field Test in Real Traffic
5.2.1. Field Test Implementation
Field test of TJ-EVSP was conducted on Changchun Road in Taicang City, which contains two signalized intersection shown in Figure 8. The test route is 670 meters long with one lane in each direction. The original signal control plans for both intersections are the same, containing two stages (North-South: 40 s, East-West: 30 s) with no offset.
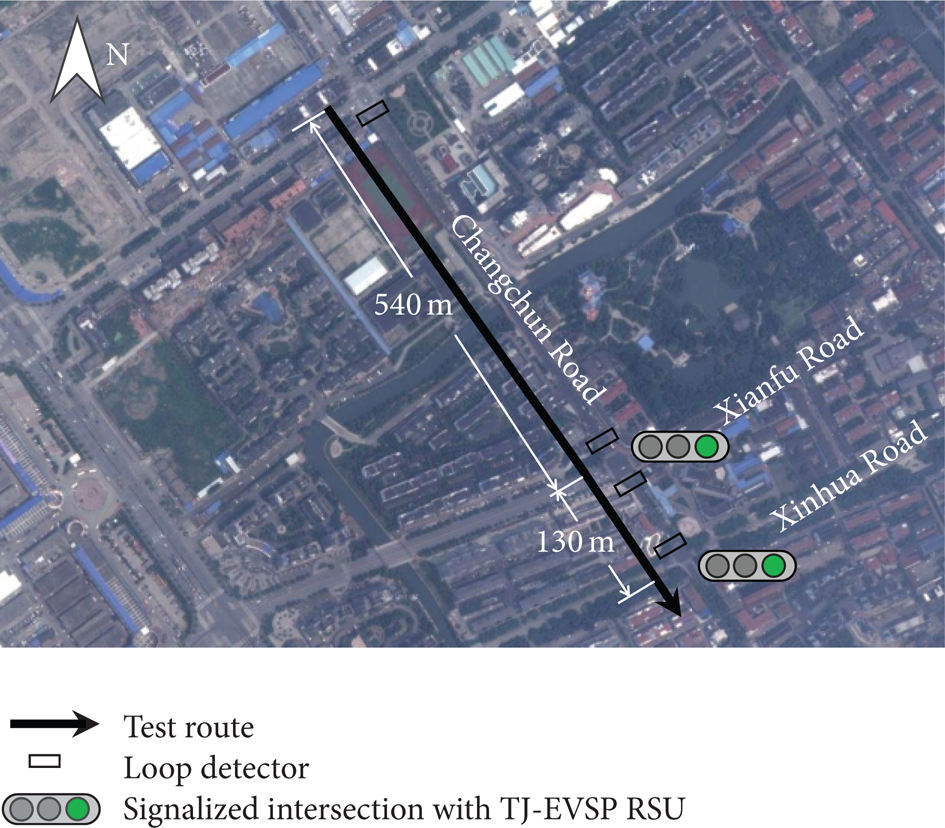
Field test implementation in Taicang city.
We compared the proposed dynamic signal preemption strategies with the scenarios of nonpreemption and static preemption strategy. The static preemption strategy is widely utilized in past studies [2, 12, 22], in which EV and the signal controller are able to exchange data timely, buy only the distance from EV to intersection is used to determine the execution of Red Truncation or Green Extension. In our field test, we had set 300 meters and 100 meters as threshold value of static preemption.
5.2.2. Test Results
Field tests were carried out in the same period of a day between 20: 00 and 21: 00. The EV's trajectory, travel time, and speed were recorded. Moreover, in order to analyze the green loss of each strategy, the headway between EV and the vehicle in front of EV at stop line was recorded as E-GAP manually. The test results of the proposed dynamic signal preemption (TJ-EVSP), nonpreemption (NP), static signal preemption at 100 m (SP100), and static signal preemption at 300 m (SP300) were compared in Figure 9 and Table 2.
Field test results: data comparison (15 runs for each scenario).


Field test results: typical EV trajectory of each scenario.
From Figure 9 and Table 2, it is obvious that TJ-EVSP can significantly decrease travel time compared to the situation of NP. In NP situation, the average travel time is 107.7 seconds. When the vehicle is equipped with OBU to communicate with signal controller and achieve signal preemption, the average travel time is 65.1 seconds which is a decrease of 39.2%. The standard deviation of EV speed in TJ-EVSP is smaller than that in NP. It indicates that TJ-EVSP can reduce the speed fluctuation of EV, which is of great significance to onboard medical treatment of ambulance.
From the test result we can also conclude that the proposed dynamic signal preemption in TJ-EVSP is superior to static signal preemption. In Figure 9, when preemption was executing at Xianfu Road (the first intersection), the distance from EV to the intersection is 244 meters, while the distance to Xinhua Road (the second intersection) in the same trials is 296 meters. And the EV had passed the intersections with few speed decreases and less headway to the front vehicles (E-GAP). Compared to SP100, it is found that due to the late preemption execution of SP100, emergency vehicle may be delayed by the remaining vehicles in front of it. At the same time, although SP300 has an equal efficiency compared with TJ-EVSP, it sometimes executes the preemption command too early, resulting in more green loss compare to TJ-EVSP.
Therefore, it is evident that TJ-EVSP does lead to reduction of EV travel time.
6. Conclusion and Future Work
This paper introduced an emergency vehicle signal preemption system based on CVIS (TJ-EVSP) and has been applied to real traffic in Taicang City, China. The system architecture and operation strategies were presented. The field test results showed that TJ-EVSP has the ability to improve the efficiency of emergency vehicle operations.
There are several advantages in TJ-EVSP.
WAVE protocol is used to improve the performance of DSRC in communication latency and distance, enabling better strategies for emergency vehicle preemption.
Dynamic signal preemption strategies are developed to improve the efficiency of emergency vehicle operations with less waste of traffic resources.
Field tests on real city streets were conducted to validate the availability of our system.
For future work, first, the effect of in-vehicle warning needs to be tested. Second, when new vehicles delivered from automobile manufacturers are all equipped with advanced OBU, it is also important to develop the signal preemption strategies and conventional traffic control strategies by using the data from public OBUs.
Footnotes
Acknowledgments
TJ-EVSP is supported in part by the Ministry of Science and Technology of China (2011AA110404), the China Scholarship Council (CSC), and DENSO Corporation.