
Abstract
Deployment is a fundamental issue in wireless sensor networks (WSNs), which affects the performance and lifetime of the networks. Usually the sensor locations are precomputed based on “perfect” sensor detection model, whereas sensors may not always provide reliable information, either due to operational tolerance levels or environmental factors. Therefore, it is very important to take into account this uncertainty in the deployment process. In this paper, we address the problem of sensor deployment in a mixed sensor network where the mobile and static nodes work collaboratively to perform deployment optimization task. We consider the Gaussian white noise in the environment and present a centralized algorithm (FABGM for short) which discoveres vacancies by using detection model based on false alarm and moves the mobile nodes according to the method based on bipartite graph matching in this study. In this algorithm, the management node of the WSNs collects the geographical information of all of the static and mobile sensors. Then, the management node executes the algorithm to get the best matches between mobile sensors and coverage holes. Simulation results are presented to demonstrate the effectiveness of the proposed approach.
1. Introduction
Wireless sensor networks have received intensive research interest in recent years due to their potential capability of monitoring real physical environments and collecting data. WSNs have been used in various applications, such as forest monitoring, precision agriculture [1], battlefield surveillance, and target tracking. However, in order to conduct their tasks successfully, it is very important that they be deployed properly.
Sensor deployment is at the initial stages in sensor networks research. It is an important issue which has attracted much attention in recent years [2]. The number and locations of sensors deployed in a Region of Interest (RoI) determine the topology of the network, which will further influence many of its intrinsic properties, such as its coverage, connectivity, cost, and lifetime. Consequently, the performance of a sensor network depends to a large extent on its deployment. A problem which impinges upon the success of any WSNs deployment is the fact that sensory data are marred by the flaw of uncertainty. Indeed, information provided by sensors may not always reliable, either due to environmental factors such as Gaussian white noise or operational tolerance levels. Therefore, it is very important to take into account this uncertainty in the deployment process.
However, WSNs cannot be deployed manually in many working environments, such as remote mountainous regions, battlefields, and regions polluted by poisonous gases. An alternative method is scattering the sensors randomly, but this is affected by many uncontrollable factors, and it is difficult to achieve the desired deployment. In the last decade, researchers have focused on mixed sensor networks, in which the static nodes and mobile nodes work in a collaborative fashion to perform deployment task. Such networks have the advantage of mobility so they can be moved to appropriate positions to enhance the extent of coverage and reduce the number of nodes.
In this work, we explore the problem of uncertainty-aware deployment in mixed wireless sensor networks. The original contributions of this work are the following: first, we introduce a false alarm based detection model; a model considers the existence of Gaussian white noise. Second, using the detection model we compute joint detection probability to discover the coverage vacancies. And then, we present an approach which is based on bipartite graph matching to determine the position of the mobile sensor nodes. Before a mobile node moves to coverage vacancy, it will determine whether there are static nodes within its sensing range. If there are static nodes within its sensing range, it moves to the coverage vacancy. Otherwise, it remains in its current position. Experimental results are given to demonstrate the efficiency of our approach.
The remainder of this paper is organized as follows. Section 2 explains related works. Section 3 gives an overview of the false alarm based detection model, and we detail our deployment algorithm in Section 4. Section 5 presents our experiments. This paper is concluded in Section 6.
2. Related Prior Works
According to the characteristics of the nodes that comprise WSNs, there are three types of such networks, that is, (1) static WSNs, in which all the nodes are static; (2) mobile WSNs, in which all the sensors are mobile; and (3) mixed WSNs, in which some of the nodes are static and some are mobile.
The greatest weakness of a random static WSN is that there must be significant redundancy among the nodes in order to achieve good coverage. And the deployment of a deterministic static WSN is inefficient. In [3], the authors use a sequential deployment of sensors that is, a limited number of sensors; are deployed in each step until the desired probability of detection of a target is achieved. Sensor placement on two- and three-dimensional grids was formulated as a combinatorial optimization problem and solved using integer linear programming [4]. The main drawbacks of these approaches are that the grid coverage approach relies on “perfect” sensor detection; that is, a sensor is expected to yield a binary yes/no detection outcome in every case. The authors in [5] provide a polynomial-time, greedy, iterative algorithm to determine the best placement of one sensor at a time in a grid based scenario, such that each grid is covered with a minimum confidence level. Uncertainty associated with the predetermined sensor locations is considered in [6]. The authors propose two sensor placement algorithms, where the sensor location is modeled as a random variable with a Gaussian probability distribution. In [7, 8], the authors define an evidence-based coverage model and conceive an uncertainty-aware deployment algorithm, which determines the minimum number of sensors and their locations to ensure full area coverage. The evidence-based sensor coverage model is a generalization of the probabilistic model.
In mobile WSNs, a fundamental issue is the coverage problem. Many techniques have been developed to deal with this issue, such as coverage pattern-based movement [9–12], virtual force-based movement [13, 14], and Voronoi-based movement [15]. A distributed energy-efficient deployment algorithm is proposed by Heo and Varshney [9]. The goal is the formation of an energy-efficient node topology for a longer system lifetime. In order to achieve this goal, they employ a synergistic combination of cluster structuring and a peer-to-peer deployment scheme. Moreover, an energy-efficient deployment algorithm based on Voronoi diagrams is also proposed here. The authors in [13] propose a deployment strategy to enhance coverage after an initial random placement of sensors using virtual forces. A cluster head computes the new locations of all the sensors after an initial deployment that would maximize coverage, and then nodes reposition themselves to the designated locations. Wang et al. [15] use Voronoi diagrams to discover the coverage vacancies and design three movement-assisted sensor deployment protocols, including VEC (vector based), VOR (Voronoi based), and minimax. The greatest weakness of a mobile WSN is its price, which is significantly greater than the price of a static WSN, because the price of mobile sensors is much greater than the price of static sensors.
The mixed wireless sensor networks that are composed of a mixture of mobile and static sensors are the tradeoff between cost and coverage. To provide the required high coverage, the mobile sensors have to move from dense areas to sparse areas. In [16], the authors proposed a collaborative coverage enhancing algorithm (coven) which uses a “Voronoi polygon” to determine the placed positions and the number of estimated holes. However, it is not feasible to apply Voronoi diagrams in WSNs due to their excessive complexity. A grid deployment method is proposed in [17], where the map is divided into multiple individual grids, and the weight of each grid is determined by environmental factors such as predeployed nodes, boundaries, and obstacles. The grid with minimum values is the goal of the mobile node. The authors in [18] proposed a novel, centralized algorithm to deploy a mixture of mobile and static sensors to construct sensor networks which used Delaunay triangulation rather than a Voronoi diagram to detect the coverage holes.
To the best of our knowledge, almost all related works assume either a binary or a probabilistic-based coverage model. The binary coverage model is overly simplistic and does not reflect reality, while the probabilistic coverage model is limited and does not allow the easy integration of some related issues, such as sensor reliability. This paper presents a centralized algorithm in which the management node executed the algorithm to discover vacancies by using detection model based on false alarm and then to get the best matches between mobile sensors and coverage holes. The detection model used in our work considers the environment factor and reflects reality well. Simulation results show the effectiveness of our algorithm.
3. Detection Model
3.1. Assumptions
Our algorithm is based on the following assumptions.
The location of each sensor node is known, which can be obtained at a low cost from Global Positioning System (GPS) or through location discovery algorithms. It is assumed that all sensor nodes have identical capability for sensing and communication. The mobile nodes have the ability to move and can move to the optimized position accurately.
3.2. Sensor Detection Model
We assume that the WSNs work in an environment with a Gaussian white noise, and each sensor involved in the signal detection transmits a signal with the same energy
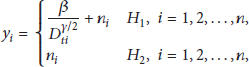

It is noted that under hypothesis


Now, let us focus on the Neyman-Pearson criterion. The Neyman-Pearson criterion maximizes the probability of detection

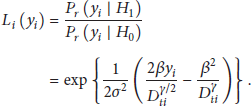
Since the


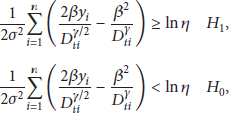


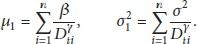






Consider

4. Deployment Algorithm
In this paper, we evaluate the coverage performance by area coverage rate. We assume that N static nodes and M mobile nodes are deployed in the

4.1. The Discovery of Coverage Vacancies
At first, n sensors (include N static nodes and M mobile nodes) have been scattered randomly in a
Schematic of joint detection probability. (a) Detection probability before iteration. (b) Detection probability after iteration.
4.2. The Movement of Mobile Nodes
After the termination of iteration, the position of the virtual nodes is defined as coverage vacancies. For the initial network deployment, Firstly we construct a bipartite graph Add all the movable nodes into Add all the virtual nodes into For
A set H of independent edges in a graph
For illustration, an example is given here. We assume that the vertex set of bipartite graph G is

An example of bipartite graph construction (a) Weight matrix of edges of bipartite graph (b) the constructed bipartite graph.
According to
input: Static nodes False-alarm probability parameter
(1) (2) Calculate (3) (4) Search (5) Update the static node set (6) Update iteration times, set t: (7) Calculate (8) (9) Construct bipartite graph (10) Adjust the position of the mobile node which is in consistent with
5. Simulations Results
Now we present simulation results regarding the proposed algorithm. All of the simulation results given in the following are obtained by programs in C++ and Matlab. We consider a specific WSNs scenario where the field has a square shape of size
Settings of simulation parameter.
Figure 3 shows the schematic diagram of movement condition of the mobile nodes. The circle represents the mobile node and the five-pointed star represents coverage void. If a circle i and a five-pointed star j are connected by a line, it indicates that mobile node represented by circle i can move to the coverage hole represented by the five-pointed star j. As introduced above, if the distance between mobile node u and coverage hole v exceeds the maximum moving distance

Position of mobile nodes before and after optimization.
Figure 4 provides the schematic diagram of detection probability distribution comparison between the random method and our deployment method. It is obvious that there are many coverage vacancies and points with low probability in the network after the initial random deployment. From Figure 4(b), we know that the proposed algorithm in this paper can decrease the coverage void and improve the coverage performance of the network. Figure 5 shows the coverage performance of FABGM algorithm when the mobile nodes percentage varies from 0% to 80%. Due to the lack of reference system, we compare the proposed algorithm with the initial deployment. We can see that our deployment can enhance coverage compared to the initial random deployment and that the network coverage quality increases with the number of mobile nodes increase. However, when the mobile node percentage is larger than 50%, network coverage increases slowly along with the increase of the number of mobile nodes.

Distribution of joint detection probabilities. (a) Random deployment. (b) Distribution after running FABGM.

Coverage quality before and after optimization.
In order to analyze the relationship between coverage performance and the value of β, we discuss the network coverage condition when the value of β is 1, 3, 6, and 8 separately. From Figure 6, we know that when the value of β is fixed, the network coverage improves with the increase of number of mobile nodes. When the value of β is small, the network coverage improves apparently. When the value of β is large (e.g., = 6, 8), increasing the number of mobile nodes will not improve network coverage significantly. That is because the value of β is proportionate to
Coverage comparison of different β.
Figure 7 gives the minimum number of sensors required to reach a certain coverage percent when the percentage of mobile sensors varies from 0% to 80%, in 10% increments. As shown in Figure 7, the sensor nodes required in the mixed WSN are less than that in the static WSN. As the percentage of mobile sensors is 40%, the number of sensors in the mixed WSN is about half the number of sensors in the static WSN. The number of sensors needed decrease with the increase of the number of mobile nodes. When the percentage of mobile sensors increases from 0% to 30%, the number of sensors for 80% coverage decreases from 65 to 35, but when the percentage increases from 50% to 70%, the effect is not as significant as before. Considering that the price of mobile sensors is higher than the price of static sensors, it is necessary to determine proper number of mobile nodes in a network. However, the number of mobile nodes is related to the ratio of the price of mobile sensors to the price of static sensors.
The minimum number of sensors required to reach a coverage percent in different mobile percentages.
Figure 8 shows the cost of WSN to reach 85% coverage at different ratios of the price of mobile sensors to the price of static sensors. When the price discrepancy of mobile nodes and static nodes is minor, increasing the proportion of mobile sensors can reduce the overall cost of WSN. When the ratio is between 2 and 6, the mixed WSN has the lower cost, and also the proportion of mobile sensors is not very high (e.g., 20% ≤ the percentage of mobile sensors ≤ 50%). But when the ratio is greater than 6, it is better that the nodes in the network are all static nodes. It is apparent that the mixed WSN is a best choice when the ratio between the price of the mobile sensor and the price of the static sensor is 2–6. Under this circumstance, our proposed algorithm is useful and can provide a tradeoff between the cost and the coverage.

The cost to reach 85% coverage.
6. Conclusion
Sensor deployment is at the initial stages in sensor networks research. Here, we explore the problem of uncertainty-aware WSNs deployment, and we start with a “random” distribution of the nodes (including mobile nodes and static nodes) over the region of interest. In this paper, we propose a false-alarm deployment algorithm to improve an initial deployment of nodes. After going through the proposed algorithm, the area of interest is covered by uniformly nodes. Simulation results demonstrate the effectiveness of the proposed approach.
Footnotes
Acknowledgments
This work is supported by National Natural Science Foundation of China under Grants No. 61070169 and Natural Science Foundation of Jiangsu Province under Grant no. BK2011376, the Specialized Research Foundation for the Doctoral Program of Higher Education of China No. 20103201110018 and Application Foundation Research of Suzhou of China No. SYG201118, SYG201240.