
Abstract
This paper presents a nonuniform node configuration of wireless sensor networks (WSNs) for long-span bridge health monitoring. The methodology and strategy of two-phase node arrangement for nonuniform WSN configuration are firstly presented, and then numerical examples are carried out by a long-span suspension bridge. Three cases, which are four sensor nodes distributed on one side of the girder, ten sensor nodes distributed on one side of the girder, and eight sensor nodes distributed averagely on two sides of the girder, are employed. In case I and case II, three schemes that are the nonuniform node configuration arranged by the two-phase node arrangement method, the uniform nodes configuration, and the independent sensor nodes configuration are used for comparison. And in case III, two schemes that are nonuniform nodes configuration and the independent sensor nodes configuration are adopted. The results indicate that the nonuniform node configuration can balance energy consumption, eliminate “energy hole,” and maximize network performance effectively, which shows the most outstanding performance when compared with other conventional node configurations. So, the efficiency of the two-phase node arrangement method is validated.
1. Introduction
In recent years, a large number of long-span cable-supported bridges have been built throughout to fulfill the requirements of modern society for advanced transportation systems [1], for example, the Akashi Kaikyo Bridge with a main span of 1990 m in Japan, the Great Belt Bridge with a main span of 1624 m in Denmark, and the Runyang Suspension Bridge with a main span of 1490 m in China [2]. With the development of material and construction technology, bridges tend to light weight, low stiffness, and low damping, which make those bridges sensitive to dynamic loads. In order to verify new construction design assumptions, detect potential damage, and prevent catastrophic failure, structural health monitoring (SHM) is implemented on many existing or newly built bridges all over the world.
A typical SHM system includes three major components: a sensor system, a data processing system (including the data acquisition, transmission, and storage), and a health evaluation system [3]. The sensors are used to monitor structural status and environmental parameters, which provide necessary data for structural assessment. In the past few decades, numerous vibration-based damage detection approaches have been developed [4], which promote that the structural vibration monitoring is an important issue in SHM. Ideally, if all degree of freedoms (DOFs) of a bridge are placed with accelerometers, the dynamic response can be fully characterized. However, the high costs of data acquisition systems (including development, purchase, and maintenance costs for the accelerometers, as well as resource and communication costs) and accessibility limitations constrain in many cases the scale of the network. So, the optimization of accelerometer placement, which aims to select the optimal locations of accelerometers so that the behavior of bridges can be well identified, is a key work prior to dynamic monitoring of bridges [5]. Up to now, a large number of methodologies of optimal wired accelerometer placement have been developed for long-span bridge health monitoring based on different criterions, such as the effective independence (EI) method [6, 7], the QR decompose method [8, 9], the MinMAC algorithm [10], and so forth. A comprehensive survey of gradient-based local optimization methods for accelerometer placement can be found in Li et al. [11]. More recently, combinatorial optimization methods based on the biological and physical analogue have been extensively used for the optimization of optimal accelerometer placement problems due to their many advantages over the classical optimization techniques such as being a blind search method and being highly parallel. Among them, the most powerful heuristics are based on the genetic algorithms (GAs). Yao et al. [12] took GA as an alternative to the EFI method, and the determinant of the FIM is chosen as the objective function. Yi et al. [13, 14] improved some drawbacks of GAs and proposed a generalized genetic algorithm (GGA) for sensor placement of high-rise structural health monitoring. Moreover, the monkey algorithm (MA), which was firstly designed by Zhao and Tang [15] from the inspiration of mountain-climbing processes of monkeys, has been introduced in the field of optimal accelerometer placement by Yi et al. [16]. And then, the dual-structure coding method and asynchronous-climb process were incorporated in the MA, and the convergence speed is improved dramatically [17]. All of those methods mentioned before are fit for wired accelerometer, in which the distance between any two sensors is unconstrained.
Rapid advances in sensors, wireless communication, microelectromechanical systems (MEMS), and information technologies have significant impacts on SHM. Compared to conventional wired sensor, wireless sensor has many attractive features, including ease of installation, wireless communication, onboard computation, relatively low cost, and small size [18]. Several researchers have contributed to wireless sensors technology in monitoring bridge structures from sensor development and applications [19–27], providing important insight into the potential of wireless sensor networks (WSNs) technology for long-term monitoring. In real-world SHM of long-span bridges, linear network that the wireless sensors are deployed on the girder one by one along a straight line is adopted in common since the span is much larger than the height. In this type of WSN, multihop and single-line route are employed, and the nodes near the sink bear heavy transmission load. As a result, those nodes would deplete their energy quickly, leading to what is called an “energy hole” near the sink. A lot of energy of nodes far from the sink is wasted, which induces that the performance of the WSN is poor. The practical implements indicate that the limited energy of wireless sensor which is the greatest obstacle that hinders dense network is distributed for long-term monitoring. Therefore, many contributions were conducted on eliminating “energy hole,” balancing energy consumption, and optimizing performance of WSNs. An analytical model for the “energy hole” problem in uniform node distribution WSNs was presented by Li and Mohapatra [28]. And then, Stojmenovic and Olariu [29] proved that the “energy hole” problem is unavoidable in WSNs if the nodes in the network are distributed uniformly and data are collected uniformly and discussed the possibility of the nonuniform node distribution strategy to balance energy depletion. Subsequently, Lian et al. [30] and Wu et al. [31] proposed different nonuniform node distribution strategies under different assumptions, respectively. Furthermore, Hossain et al. [32] provided an analytical method for placing a number of nodes in a linear array such that each node dissipates the same energy per data gathering cycle. It can be concluded from the presented achievements that nonuniform node distribution is a good configuration with respect to eliminating “energy hole.” However for WSNs of SHM, there are many special properties like high sampling frequency, continuous data flow and long-term monitoring, which induce that the existing methods cannot be used directly.
Being different from general WSNs that are used in habitat sensing, environmental monitoring, automated health care, and so forth, the sampling rate of WSN for long-span bridge health monitoring is more than 50 Hz in most occasions. So, the energy consumption for data sensing is significant and cannot be ignored. On the other hand, the nodes are distributed as a straight line along the bridge span. The data are transmitted by multihop and single-line route. This paper develops a nonuniform node configuration of WSN for long-span bridge health monitoring. A two-phase node arrangement method used for nonuniform node configuration is presented at first. Based on the introduced method, the WSN configurations under different test cases are carried out by a long-span suspension bridge, and the performances of those configurations are evaluated. Three cases with different sensor nodes and different monitoring requirements are executed, so that the performance of the WSN with nonuniform node configuration can be displayed extensively. For comparing the results of the two-phase node arrangement method, other WSN schemes with the same monitoring requirements are also provided.
2. Two-Phase Node Arrangement Method
Considering the cost of the WSN and the requirement of the bridge health monitoring, the reasonable strategy is that the WSN is organized by two types of nodes, sensor node and relay node, which is named as composite WSN. The sensor node and relay node have the same node platform. The relay node with low price does not instrument with sensor board. In this WSN, the sensor node is responsible for vibration monitoring and data retransmission, and the relay node is only responsible for retransmitting data. Therefore, the investment of the WSN deployment is reduced dramatically.
According to the characteristics of the composite WSN, two-phase node arrangement method can be adopted to implement the nonuniform node configuration. The first phase is sensor node arrangement to fulfill the requirement of the bridge health monitoring, and the second phase is relay node arrangement to balance the energy consumption of nodes in WSN and improve the performance of the WSN. In the phase of sensor node arrangement, there is no need to take the data transmission range into account for the existence of relay nodes. So, the improved general genetic algorithm (GGA), which is superior in biologics to the classical genetic algorithm (GA), is employed. The dual-structure coding system, in which the chromosomes of an individual are composed of append code and variable code, is used to initialize the population. The two-quarter selection, whose process is two-parent selection → crossover → a family of four → two-quarter selection → mutation → a family of four → two-quarter selection → next generation is introduced in the evolution. In the process of evolution, the gradual change and sudden change are combined to avoid local optimal solution. In general, the gradual change is adopted. When the best fitness value of the population keeps constant in several continuous generations, the evolutionary processing turns to sudden change. Until the best fitness value changes, the evolutionary processing turns back to the gradual change. The partially matched crossover (PMX) is applied in the crossover, while the swap mutation and inversion mutation are used in the gradual change and the sudden change, respectively. The modal strain energy (MSE) is taken as the fitness function in GGA. In the phase of relay node arrangement, the relay nodes are configured by the nonuniform node arrangement method based on the principle that the energy of all nodes in WSN is depleted almost simultaneously. Using the data acquisition efficiency (DAE) that is defined as data capacity per unit deployment cost, the closed-form solutions for the number and the location of relay nodes within two adjacent sensor nodes can be obtained.
3. Simulation Environment
The long-span suspension bridge, with main span of 1490 m, is used to demonstrate the effectiveness of the two-phase node arrangement method. The bridge is a single-span-double-joint steel box girder bridge. The width and height of the full-joint streamlined steel box girder are 36.3 and 3.0 m, respectively. 182 suspenders are used to transfer the load of girder to main cables, and the distance between two adjacent suspenders is 16.1 m. The two side spans are 470 m, and there is no suspender in the side span. The two towers with three-story frame structure are applied. The heights of the two towers are about 210 m. There are two tower columns with three prestressed concrete crossbeams (top, middle, and bottom crossbeams) in each tower. An updated three-dimensional finite element model is established in order to provide input data for the WSN arrangement. The main girder and main towers are simulated by spatial beam elements, and the main cables and suspenders are simulated by 3D linear elastic truss elements with three DOFs at each node. Then, the model shapes, and model frequencies can be obtained by model analysis. For simplicity, only vertical model shapes relating to main girder are accounted for here. The first six vertical model shapes are plotted in Figure 1, and the first eight vertical model frequencies are listed in Table 1. The 1st vertical model frequency is only 0.0879 Hz, no more than 0.1 Hz, which reveals the super low stiffness of this long-span suspension bridge.
The first eight vertical model frequencies.


The first six vertical model shapes.
The parameters of node are listed in Table 2 [33]. In the table,
The parameters of node.

Three cases, which are four sensor nodes placed in the same girder side, ten sensor nodes placed in the same girder side, and eight sensor nodes placed averagely in two girder sides, are considered here.
4. Results Analysis
4.1. Case I
In this case, a total number of four sensors are used for vertical vibration monitoring. The two-phase node arrangement is carried out. In the first phase, the locations of sensor nodes are optimized by improved GGA; in the second phase, the relay nodes are configured by nonuniform node arrangement method.
It is well known that the path of searching is selected randomly in random search algorithm, so the different results are obtained by several times of calculation. The better choice is selecting the best one from those results. For the GGA, there are a number of parameters that are problem specific and need to be explored and tuned so that the best algorithm performance is achieved. The population size of 300 is selected. The GGA processes have been run for 10 times with different stochastic initial populations, and the best one is adopted. The fitness convergence curves are shown in Figure 2. It can be seen that only 54 generations are needed to reach the optimal value. The maximum fitness values tend to a constant quickly, and the average values and the minimum fitness values steadily tend to the maximum fitness values along with increasing number of generation, which shows a good characteristic of convergence. After 100 iterations, both the average fitness values and the minimum fitness values converge to the best one. The best sensor node locations are plotted in Figure 3. The sink is paced on the right end of the girder. Because there are only four sensor nodes, the optimal result is in accordance with the experienced deployment. The sensor nodes are placed in 6/8 section, 4/8 section, 2/8 section, and 1/8 section of the main span, respectively. The smallest distance is 186.25 m, that is, much longer than the ultimate transmission range, which means that the relay nodes are needed in every sensor nodes interval.
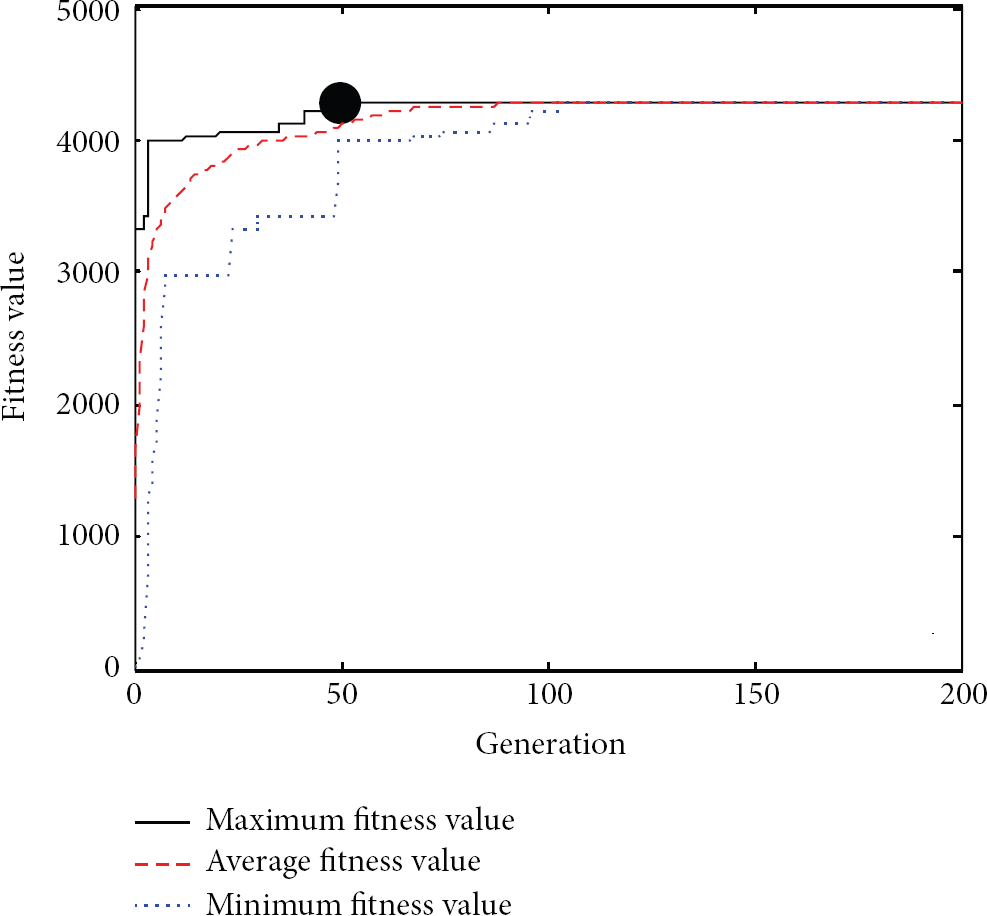
Evolution progress of the GGA with four sensor nodes.

Non uniform node configuration (unit: m).
Commonly, the sampling frequencies of all sensor nodes for vibration monitoring are identical so that the structural models can be identified. In this paper, to make the simulation environment more general, two types of sampling frequencies, 40 Hz and 50 Hz, are used by different sensor nodes and are listed in Table 3. The relay nodes are employed to fill the banks of sensor nodes intervals. Scheme I is named as nonuniform configuration, and the relay nodes are configured by the proposed nonuniform node arrangement method, as shown in Figure 3. In the figure,
The sampling frequency of sensor nodes.

Node arrangements of different schemes.


Independent sensor node configuration (unit: m).
Figure 5 displays the residual energy of nodes in different schemes when the networks die. In the figure,
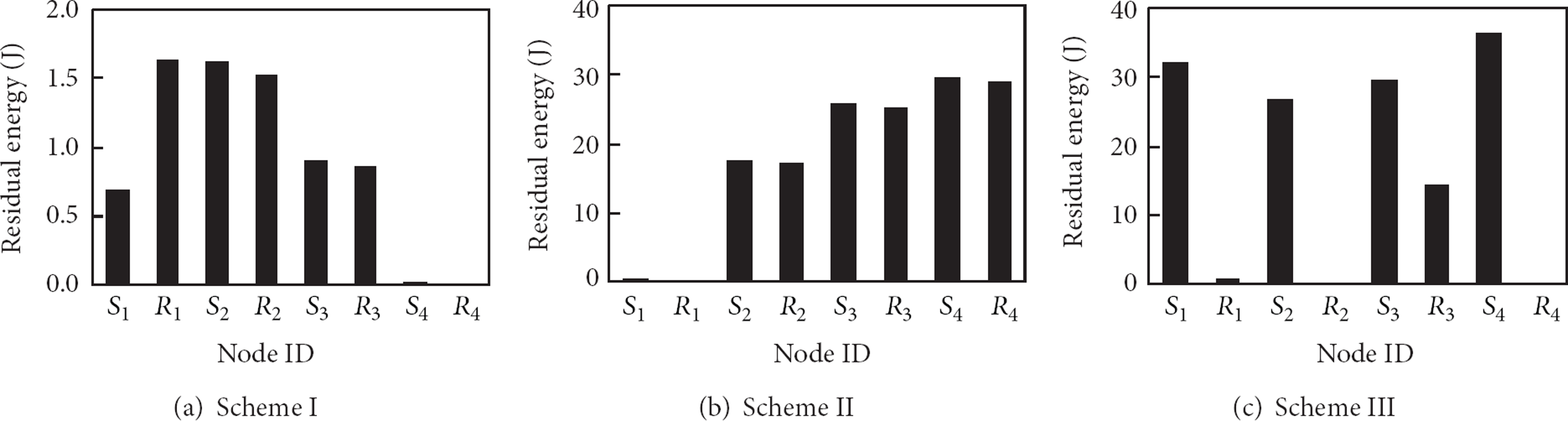
Residual energy of nodes in different schemes.
4.2. Case II
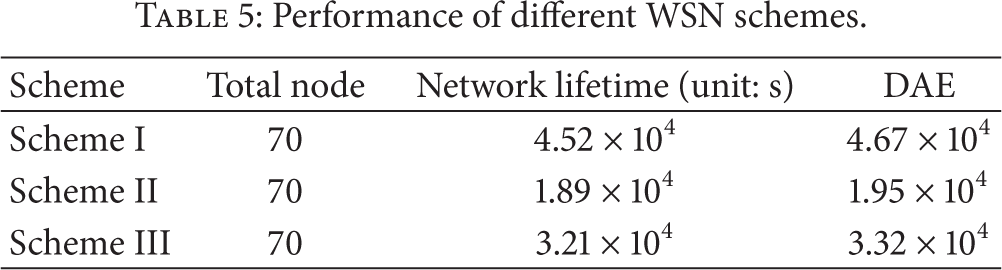
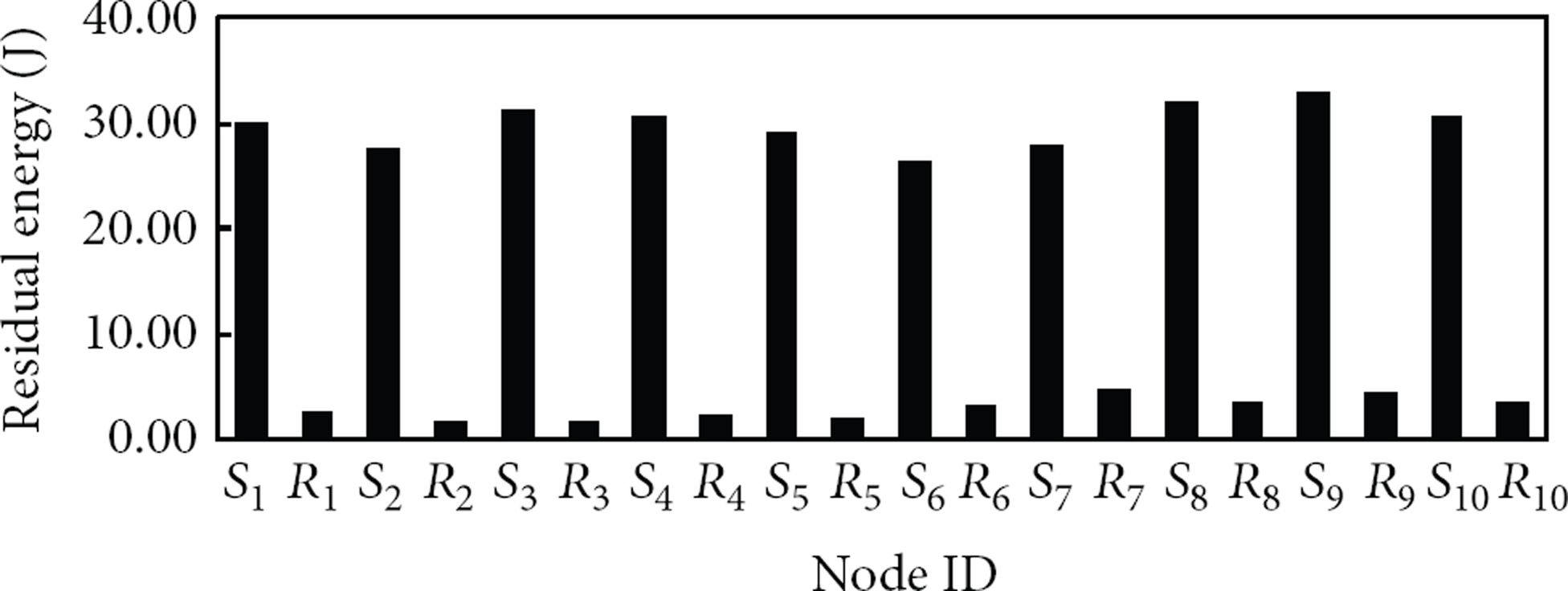
In this case, 10 sensor nodes are adopted. Similarly, the sensor nodes are firstly placed by improved GGA. And then, the relay nodes are distributed by nonuniform node arrangement method. The population size of 500 is used this time. The process of convergence is shown in Figure 6. The excellent ability of global optimal solution searching of improved GGA is demonstrated also. The maximum fitness value converges to the best quickly. Three schemes like case I are employed also. The sampling frequency of different sensor is specified by different value. The performance of the three WSN schemes is listed in Table 5. The highest value of network lifetime and DAE is acquired in nonuniform configuration. The network lifetime and DAE of other two schemes are much less than that of scheme I. The residual energy of nodes in scheme I, II and III, is given in Figures 7, 8, and 9, respectively. Like case I, the node configuration arranged by the two-phase node arrangement method has the lowest residual energy. The maximum residual energy is only 1.81 J. Comparing with that in Figure 5(a), the value of residual energy shows a few changes. The robustness of the proposed method is validated. In scheme II, the maximum residual energy is 37.14 J, more than 90% of the initial energy of the node. Big “energy hole” is formed in this network. When compared with scheme II in case I, with the number of nodes increasing, more energy is left. It can be deduced that there may be no data transmitted to sink when the scale of this type of WSN scheme is big enough. In scheme III, the residual energy is almost 30 J, which is similar in case I. When 10 sensor nodes are used, the best performance is also shown in scheme I.
Performance of different WSN schemes.
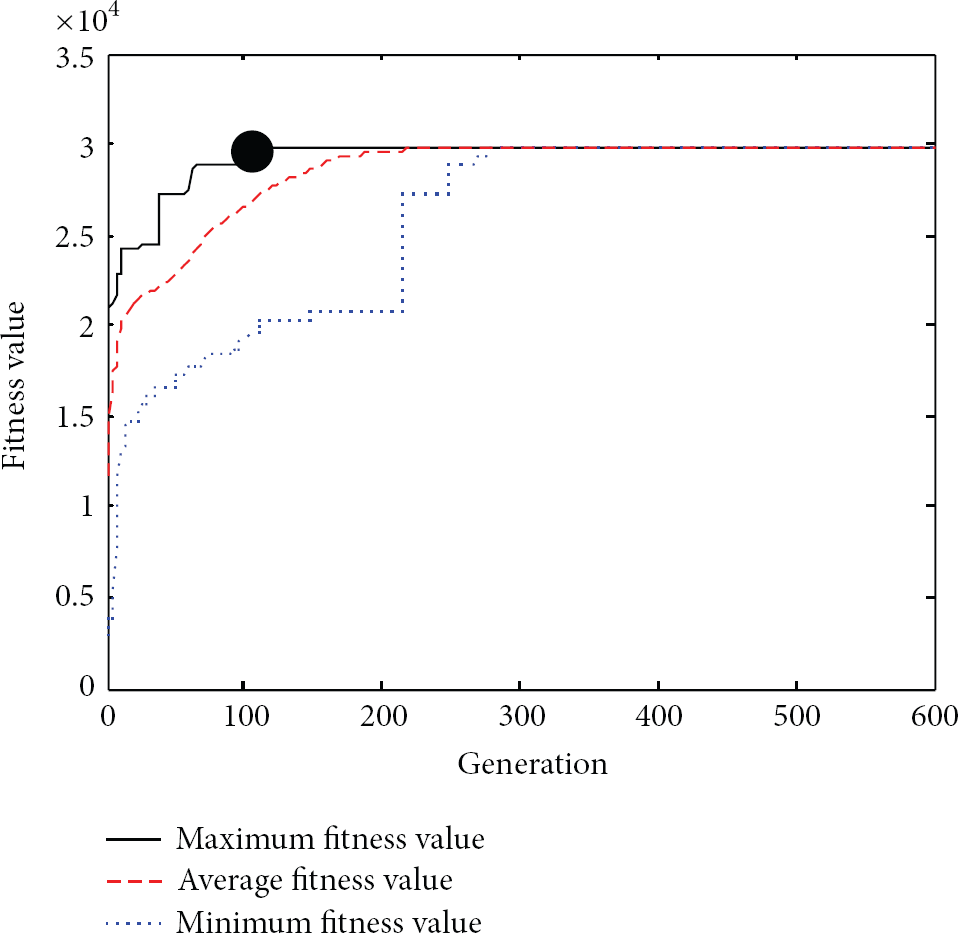
Evolution progress of the GGA with ten sensors.
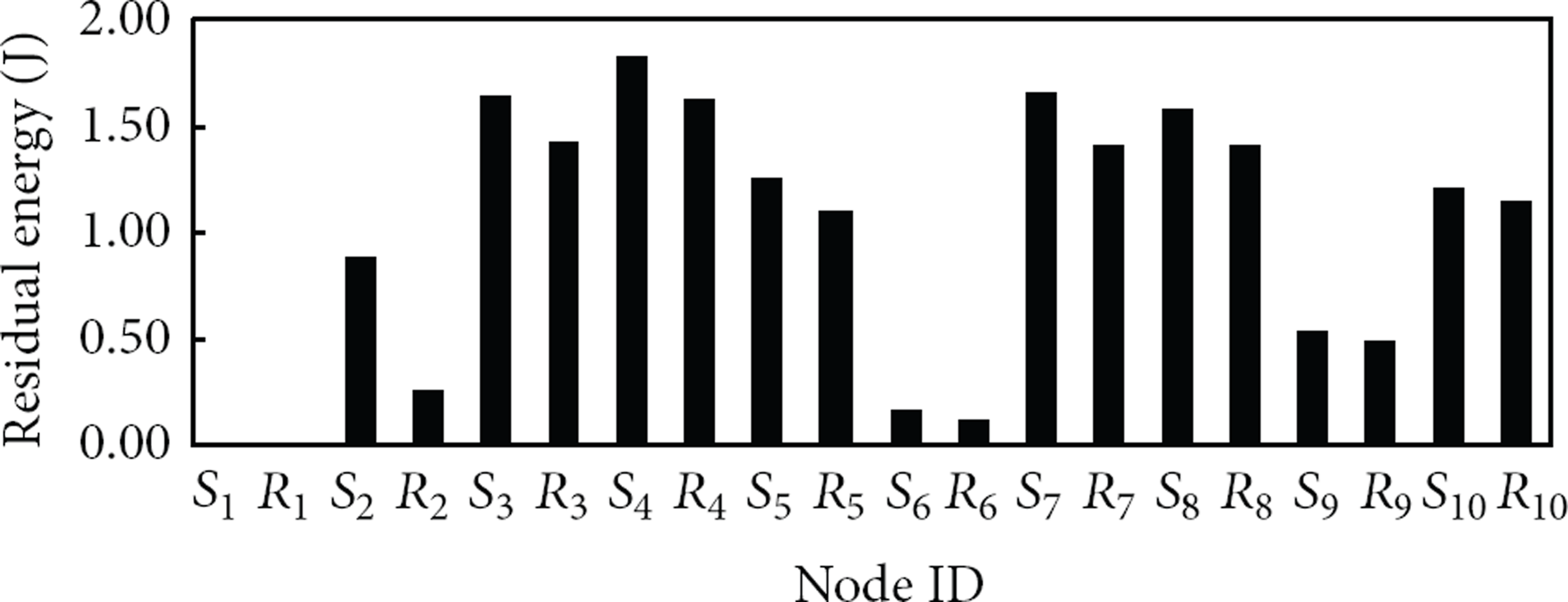
Residual energy of nodes in scheme I.

Residual energy of nodes in scheme II.
Residual energy of nodes in scheme III.
4.3. Case III
Because of the low stiffness, the torsional vibration of the long-span bridges under skew wind or other nonuniform excitation cannot be neglected on some occasions. To monitor the torsional vibration, accelerometers should be placed on the two sides of the girder, assuming there are four sensor nodes on each side. Two schemes are discussed in this case. In scheme I, the data on each side are transmitted independently and gathered to sink at last, as displayed in Figure 10. So, there are two independent linear arrays in the WSN. And in scheme II, one linear array placed in the isolation strip that is only organized by relay nodes is used for retransmitting data, as shown in Figure 11. The sensor nodes are only responsible for collecting data and transmitting it to the nearest relay node.

Two independent linear arrays (unit: m).

Linear array of relay node with two side sensor node (unit: m).
After calculating, the network lifetime and DAE of scheme I are
5. Conclusions
WSNs, which are identified as one of the most important technologies of the XXI century, have been widely used in SHM of long-span bridges. The limited energy of sensor node makes the performance of WSNs sensitive to energy consumption of every node in network. For WSN of long-span bridge health monitoring, the performance is critical since the test with long period and high sampling rate is required. Through balancing energy consumption, avoiding “energy hole,” and increasing data capacity, the performance of WSNs can be improved. The performance of nonuniform node configuration that is deployed by two-phase node arrangement method is demonstrated by three different cases. In every case, the scheme configured by the proposed method is compared with other scheme. In the uniform configuration, the “energy hole” cannot be avoided. The bigger the network is, the more energy is wasted. The performance of the uniform WSN is so poor that it is not fit for linear network. In the independent sensor node configuration, the sensor nodes are removed from the route of data retransmission. So, the potential of sensor nodes is not utilized adequately. The performance of this type of configuration is a little worse than that of the nonuniform node configuration. In the nonuniform node configuration deployed by the two-phase node arrangement method, the energy of nodes is consumed almost synchronously. The longest network lifetime and the highest DAE are obtained in this configuration, and the most outstanding performance is shown. At the same time, the performance is stable on different test occasions. In the simulation, there are no special requirements presented; so the proposed two-phase node arrangement method can be used for WSN configuration of real-word long-span bridge health monitoring with the main properties of high sampling frequency, continuous data flow, and long-term monitoring extensively.
It should be noted that the results in this paper are deduced based on the assumed theoretical models. The real environments of WSN are more complex, and many others factors affect the performance of WSNs. More factors influencing the performance of WSNs such as quality of service, energy efficiency route, and network topology should be further performed in the future to the generalization of the model developed in this paper.
Footnotes
Acknowledgments
This research work was jointly supported by the Science Fund for Creative Research Groups of the NSFC (Grant no. 51121005), the National Natural Science Foundation of China (Grant no. 51308186, 51222806), the Starting Research Fund from the Hohai University (Grant nos. 2013B01414), and the Research Fund of State Key Laboratory for Disaster Reduction in Civil Engineering (Grant no. SLDRCE12-MB-03).