Most current navigation devices or apps, based on the global positioning system (GPS),
only adopt static information for route planning. Although some are equipped with an
RDS-TMC receiver to receive real-time traffic events, many of these real-time traffic
events are irrelevant to the vehicle. This paper offers three major contributions. First,
a vehicular-ad-hoc-network- (VANET-) based
() route
planning algorithm is proposed to calculate the route with the shortest travelling time or
the lowest fuel consumption, depending on two real-time traffic information sources, which
have not been used in traditional GPS navigation applications. The first traffic
information source is the recorded traffic information of the road segment that the
vehicle has passed through. It is further exchanged between vehicles through an IEEE
802.11p wireless link. The second traffic information is provided by Google Maps. A GPS
navigation app is then implemented on the Android platform to realize .
Finally, simulations for six route planning algorithms are executed by VANET simulator The
ONE, in one congested and one noncongested time period, respectively. In summary,
achieves significant reductions in both the average travelling time and fuel consumption
of the planned route, as compared to traditional route planning algorithms.
1. Introduction
As the accuracy of the Global Positioning System (GPS) [1] has improved to within a few meters, GPS applications have
become increasingly popular in our daily lives. Of these applications, the GPS navigation
system is one of the most used. Before the development of GPS navigation systems, people had
to use paper maps for travel directions. However, with the aid of voice-activated GPS
navigation systems, people can now plan their routes on an electronic map in real time to
help them reach their destinations efficiently and smartly.
However, if the electronic map information is out of date, or if a traffic incident or road
maintenance event occurs in real time, the GPS navigation system may plan an erroneous
route. In recent years, many methods for addressing this problem have been developed,
including real-time online road information supported by the Radio Data System-Traffic
Message Channel (RDS-TMC) [2], which uses
FM channels to transfer real-time traffic data to vehicles. However, most traffic data
provided by RDS-TMC are for specific roads in urban areas or highways. Thus, on-board GPS
navigation systems may not receive useful road information from RDS-TMC to assist in route
planning. Furthermore, due to RDS-TMC's low bit rate, it is not possible to transfer large
amounts of traffic data to vehicles with acceptable delays. On the current market, GPS
navigation apps such as Garmin StreetPilot Onboard [3] for Apple iPhone/iPad or PaPaGo! Mobile [4] for the Android platform are becoming more
and more prevalent. Offline maps are preloaded in these apps for the user to look up
addresses and millions of points of interest (POIs), such as gas stations, restaurants, and
parking lots, without wireless coverage. Moreover, if a wireless connection is available,
these apps can retrieve real-time road and traffic information from the Internet to plan a
faster route to the destination by avoiding roads under construction or congestion. However,
they exhibit problems similar to those of RDS-TMC, that is, not all roads have real-time
information, and the wireless connection to the Internet is a must.
As an alternative communication technology for exchanging real-time information by
long-range 3G/4G, IEEE 802.11p, and so forth, WAVE architecture [5] has been designed for short-range vehicle-to-vehicle (V2V)
communication. When people drive on the road, these vehicles can transfer information to
each other through a dynamically formed vehicular ad hoc network (VANET) [6]. If a vehicle has encountered a traffic
incident, it can send safety messages to warn neighboring vehicles with information
including the time, location, and status of the incident [6, 7]. These
neighboring cars then further forward the safety messages to their neighbors, such that they
can replan their routes in real time to avoid encountering the incident. In this way, the
travelling time and fuel consumption, that is, travelling costs, of vehicles can be reduced.
On the other hand, the Dijkstra shortest path [8] and A-star ()
[9] algorithms are usually used to plan
routes in GPS navigation systems. Compared to Dijkstra,
achieves shorter computation time by using heuristic functions. It uses a best-first search
and finds a least-cost path from a given initial node to one destination node with lower
hardware requirements. Recent studies [10, 11] have therefore extended
into new path planning strategies. However, these traditional route planning algorithms use
static information such as the speed limit, instead of the real-time speed of each road
segment, to calculate the route to the destination, which usually underestimates the actual
travelling time and fuel consumption in turn. Therefore, dynamic route planning schemes,
which incorporate real-time traffic information and react to the dynamic conditions of the
road, are more robust than static ones for congestion alleviation [12].
This paper focuses on designing and implementing an Android-based navigation app, which has
the following advantages for reducing the travelling time, fuel consumption, and emitted
carbon dioxide, for dynamic route planning.
A generic format to record the vehicle's driving
information on an Android platform like a smart phone or tablet PC carried by the
vehicle's driver is designed. This information includes the time spent, fuel consumed,
and average speed on each road segment that the vehicle has passed through
recently.
Each vehicle will distribute its recorded driving
information to its neighboring vehicles in the VANET, which means that these vehicles
are within the IEEE 802.11p wireless communication range. Thus, each vehicle may be
notified of actual traffic information of road segments, which it has not known, by
its neighboring vehicles. As more dynamic road information is received from other
vehicles, each vehicle can estimate future road information more accurately. In this
way, the kind of dynamic route planning algorithm executed in the Android platform of
each vehicle can output a more precise path to the destination than traditional static
algorithms do.
The real-time traffic data of road segments accessible
from Google Maps [13] is used in
this Android-based GPS navigation app to compensate for the road information missed in
the dynamic road information received from neighboring vehicles. With these two kinds
of road information, this Android-based GPS navigation app can more accurately
estimate future road information by the exponentially weighted moving average (EWMA)
function [14] modified in this
paper.
Using the two kinds of road information previously
mentioned, an improved
route planning algorithm, that is, the VANET-based
(),
is proposed to calculate an initial route when the vehicle starts its GPS navigation.
Two criteria are adopted in this improved algorithm to plan the route with the
shortest travelling time and the lowest fuel consumption,
respectively. Whenever the vehicle has received newer road information from
neighboring vehicles or Google Maps, this
algorithm will recalculate the route to the destination and update the visual and
auditory guidance information for the driver in real-time.
The remainder of this paper is organized as follows. Traditional route planning methods and
Android-based navigation systems are discussed in Section 2. Section 3 explains detailed app design, including real-time road information collection
and distribution mechanisms through the VANET, of the
route planning algorithm. In Section 4,
implementation issues and screen snapshots of this GPS navigation app on the Android
platform are presented. After this, we present simulation results to exhibit the significant
performance improvements of the
algorithm reducing travelling time and fuel consumption. Finally, Section 6 concludes this paper.
2. Related Work
2.1. Route Planning Strategy
The shortest path problem is based on graph theory. It is a problem for a graph with
nodes and arcs to find the shortest path between two nodes. The Dijkstra and
algorithms are usually used to solve it. The Dijkstra algorithm can find the shortest path
from a particular node to other nodes with time complexity , where
n is the number of nodes. Its key idea is to construct a spanning tree
of minimum total length from the starting node to all other nodes recursively. This
algorithm is often used as a benchmark solution for comparison with other routing
algorithms. In the following, the concepts of
and its extensions are discussed.
The
route planning algorithm uses the best-first search (BFS) [9] to find the shortest path in the graph. As
traverses the graph, it follows the path of the lowest known heuristic cost, keeping a
sorted priority queue of alternate path segments. It uses the heuristic function
, formulated as (1), to determine the order in
which the BFS visits nodes and then to calculate the total cost of each path:
where represents the cost from the
starting node to current node n in the graph, and represents the heuristic
estimate of the cost from the current node n to the destination node. If
the cost is measured by the distance between two nodes, the straight-line distance from
node n to the destination is usually used as .
As shown in Figure 1, if the angle θ
between the neighbor road of the current node, that is, an intersection in this paper, and
the straight line between the current node and the destination node is smaller, it means
that the direction of the neighbor road is closer to the straight line to the destination,
which is used as as previously mentioned. Thus, the extended
algorithm in [15] modifies the original
heuristic function by multiplying an angle function as (2), where is formulated as (3). The smaller the angle is, the
smaller the values of and , that is, the estimated total
cost of the path, will be. Therefore, this modification prefers to choose the neighbor
road with the smaller θ, which in turn finds the lowest cost path more quickly than does
the original :
The angle between the neighbor road segment and the straight line to the destination
node.
The second improvement of the
heuristic function in [15] is to
consider the dynamic road speeds by modifying as (4), where and are multiplied by their
corresponding weighting parameters, that is, and
, respectively.
is calculated
by (5), where
and
denote the average driving speed and the highest speed limit of all road segments from the
starting node to current node n, respectively. Similarly, is calculated
by (6), where and
denote the average driving speed and the average speed limit of all road segments from
current node n to each neighbor node of n, respectively.
Thus, larger
and ,
that is, higher average driving speeds of all road segments from the starting node to
current node n and from current node n to each neighbor
node of n, will produce smaller and
, which in turn
generates smaller :
2.2. Existing GPS Navigation and Route Sharing Systems
Most GPS navigation systems on the market provide users with an offline map and several
modes for planning their routes. Some can receive RDS-TMC real-time traffic information
for planning a route that does not pass through a congested area. One famous Android-based
GPS navigation app is the Garmin StreetPilot [3], which is able to plan a route with the shortest distance and time modes. It
can access real-time traffic information, photoLive traffic cameras, and fuel pricing as
optional services. Recently, Garmin introduced ecoRoute energy-saving assistant [16] for calculating a more fuel-efficient
route and tracking fuel usage. By entering the fuel type, cost, and consumption at low and
high driving speeds, the driver can check information on driving distance, driving time,
average fuel consumption, cost of fuel used, carbon footprint, and so forth. It also can
help the driver become more fuel-efficient by letting them know if they are driving
efficiently. Like Garmin StreetPilot, PAPAGO! Mobile [4] also provides many route planning modes and can update
its electronic map automatically via WiFi or 3G.
On the other hand, several researches have studied the issue of sharing route information
among vehicles. In [17], the authors
proposed a route information sharing mechanism to inform the route information server of
forthcoming route details. Based on routes collected from the server, each driver can
change their route to reduce traffic congestion. However, this sharing was assumed to be
achieved through cellular communication with a remote and centralized route information
server. It is obvious that this server is the performance bottleneck and the single point
of failure. Furthermore, significant latencies are incurred in transferring the huge
amount of route information between the vehicles and the route information server. As an
alternative, a peer-to-peer VANET application for sharing and exchanging road traffic
information for vehicles to detect and avoid traffic congestion was presented in [18]. A pull-based geocast protocol was also
designed for vehicles to cooperatively collect and disseminate data. However, this work
adopted the time-consuming Dijkstra algorithm to find the least congested route to a given
destination according to the congestion index of each road segment that the vehicle had
driven through. Moreover, the least congested route found might not necessarily be the one
with the shortest travelling time or the lowest fuel consumption, which are two important
criteria in the proposed
for planning a time- or energy-efficient route for the ecofriendly lifestyle. In summary,
all navigation systems or apps allow users to choose different modes to plan their routes
on an off-line electronic map. Without the ability to access real-time traffic information
through wireless connections, most cannot help drivers avoid congested areas so as to
reduce the travelling time, cost of fuel, and carbon emissions. However, with the proposed
algorithm, which can plan the shortest travelling time or the lowest fuel cost routes in
terms of real-time traffic information exchanged between neighboring vehicles via VANET,
the Android-based GPS navigation app designed and implemented in this paper can overcome
this defect.
3. System Design
In this section, the format for recording the vehicle's driving information, the mechanism
to distribute real-time traffic information among contacted vehicles through the VANET, and
the flow to estimate the real-time traffic information of next time zone are first
described. Then, based on the traffic information distributed among vehicles and accessed
from Google Maps, two versions of the modified
route planning algorithms are proposed for meeting the shortest travelling time and the
lowest fuel consumption criteria.
3.1. The VANET-Based Traffic Information Distribution and Estimation
3.1.1. Two Traffic Information Sources
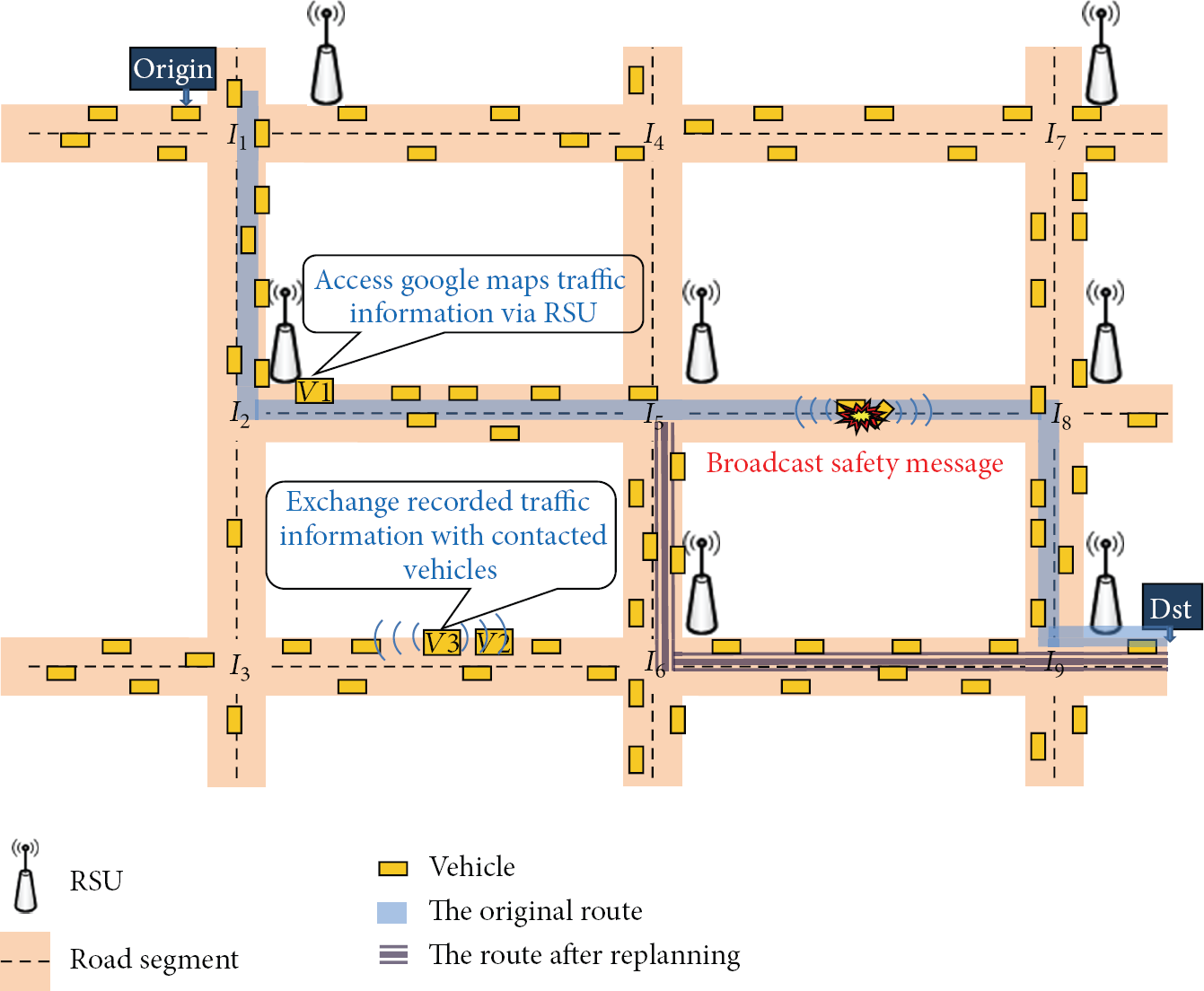
The network topology for the proposed
to plan routes with the shortest travelling time and the lowest fuel consumption is
shown in Figure 2. In VANET, the
roadside unit (RSU) acts as a wireless LAN access point and enables vehicles within its
wireless transmission range to communicate with devices in the network infrastructure.
There are two traffic information sources in this paper. The first is the on-board GPS
device and the electronic road database, allowing the vehicle to identify its current
GPS location and record information such as the instantaneous driving speed in its
memory when the vehicle starts to drive on the road. According to the traffic
information recording flow shown in Figure 3, the vehicle's on-board GPS device detects whether it has passed through an
intersection, which indicates an end of the road segment. If it has, all recorded
driving speeds are averaged and stored in the AverageSpeed field of the
three-field format for traffic information of this road segment, as listed in Table
1, with correct values in the
RoadSegmentID and RecordTime fields, which specify
the time the vehicle leaves this road segment.
The three-field format for traffic information of a road segment.
Field name
Description
Road segment ID
The unique ID of the road segment between two adjacent
intersections. For example, a road segment in Shimin Blvd, Taipei, Taiwan is
tagged with 6300009004232 as its ID [19]
Record time
The time at which traffic information is recorded
Average speed
The average driving speed of this road segment
Network topology for the proposed .
The traffic information recording flow of the vehicle.
As a vehicle like vehicle V1 in Figure 2 drives into the wireless communication range of an
RSU, it can access the real-time and historic traffic information from Google Maps as
the second source via the RSU. Google Maps divides an hour into 4 time zones, and each
time zone lasts for 15 minutes. As shown in Figure 4, four different colors are used to represent four
different driving speeds. The road segment colored in green, yellow, red, or red-black
means that its driving speed is fast, modest, slow, or congested, respectively. However,
Google Maps does not provide traffic information on all road segments, but only on major
roads in urban areas or highways. Therefore, the Google Maps information is combined
with the following proposed VANET traffic information distribution mechanism, and these
two traffic sources are aggregated to supply much more traffic information for the
route planning algorithm, which will be described later. As a result, the planned
route is more accurate and reliable for driving navigation than traditionally planned
routes.
Real-time traffic information on Google Maps.
3.1.2. The Traffic Information Distribution Mechanism through the VANET
As previously mentioned, the vehicle continuously collects traffic information as it
drives on the road. Whenever another vehicle enters the IEEE 802.11p transmission range
of another vehicle, for example, as vehicle V2 in Figure 2 contacts V3, the
VANET-based traffic information distribution mechanism proposed in this paper is
activated. As shown in Figure 5, by
exchanging IEEE 802.11p frames that contain the collected traffic information in the
format listed in Table 1 for recent
time zones of each road segment that the vehicle has passed through with neighbor
vehicles, each vehicle can be notified of the historic traffic information of the road
segments it may not have driven through.
The traffic information distribution flow.
3.1.3. Traffic Information Estimation of the Next Time Zone
As soon as the vehicle driver intends to plan a route from its origin to destination
with the proposed
algorithm, as shown in Figure 2, the
traffic information, that is, the driving speed, of the next time zone for each road
segment should first be estimated, with the flow shown in Figure 6. The recorded traffic information is classified into
the corresponding 15-minute time zone, according to the time zone diagram of Google Maps
shown in Figure 7. Then, the average
recorded driving speed of the road segment for each time zone is calculated. If Google
Maps provides historic traffic information for a road segment that has already had its
average recorded driving speed calculated, these two values, that is, the average
recorded driving speed and the speed retrieved from Google Maps, are averaged by a
weighting factor α to represent the observed driving speed of each time zone for a road
segment, which is formulated by (7), where ,
,
and
denote the average recorded driving speed, the speed retrieved from Google Maps, and the
observed driving speed of time zone t for road segment
i, respectively:
The flow to estimate traffic information of the next time zone.
The time zone diagram of Google Maps.
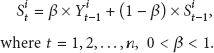
After this, the driving speed
of the next time zone t for road segment i can be
estimated by the EWMA function [14],
which is formulated in (8),
where β is the weighting factor and
and
denote the estimated and observed driving speeds of time zone
for road segment i, respectively. With the EWMA, less weight is given
to the driving speed of older time zones, and greater weight is given to that of more
recent ones. Finally, the estimated driving speed
of the next time zone t for road segment i is recorded
and used in the following
route planning algorithm:
3.2. The VBA* Route Planning Algorithm
In this paper, we will improve the heuristic function of the
route planning algorithm with two planning criteria, that is, the shortest
travelling time and the lowest fuel consumption, to find the
path from the starting location, that is, origin, to the destination of the vehicle,
respectively. Each road segment from the road database provided by the Institute of
Transportation, MOTC, Taiwan, [19]
contains its road identification (ID), name, direction, and longitude and latitude
coordinate values of its two ends, that is, intersections with adjacent road segments.
With coordinate values of both ends, the length of each road segment can be calculated.
According to the historic driving speed accessed from Google Maps and those exchanged with
neighboring vehicles, the vehicle driving speed
of the next time zone t on road segment i can be
estimated by the EWMA equation, as previously described.
3.2.1. VBA* with the Shortest Travelling Time Criterion
In the following, the term “node” is used to represent the end, that
is, an intersection, of a road segment. Equation (9) is used as the improved
to meet the shortest travelling time criterion. There are two modifications in
.
First, as shown in Figure 8,
in the original
is replaced by the sum of the travelling time of each road segment that the vehicle has
passed through when it has reached the current node n. The travelling
time of road segment i is calculated by dividing its length
over its average driving speed
for time zone t, as shown in (9). Second, the heuristic function in the original
is replaced by the second term of (9) to find a neighbor node that has the minimal value among all neighbor nodes
of current node n. denotes the straight-line distance from node
n to the destination,
is the estimated driving speed of the next road segment from current node
n to its neighbor node ,
and
()
is the angle between the next road segment from current node n to its
neighbor node
and the straight line from node n to the destination. Because there may
not be a next road segment that has the same direction as the straight line of
, that is, ,
we adopt
as the denominator of the second term to find the smallest angle between the next road
segment and the straight line of . For example, as shown in Figure 7, angles between the next road segment
from current node n to three neighbor nodes ,
,
and
and the straight line are ,
,
and ,
respectively. Because the range of the angle is , the range of its cosine
value is . The smaller the angle is,
the larger the cosine value of the angle will be. Therefore, a smaller angle in turn
produces a smaller value for the second term. Because
and the improved
cannot handle negative cost, we simply use , with a range
of , to ensure that the denominator of the
second term is greater than 0:
The angle between the next road segment from the current node n to
its neighbor node
and the straight line from node n to the destination.
3.2.2. VBA* with the Lowest Fuel Consumption Criterion
To fulfill the lowest fuel consumption criterion, (10) is proposed for the improved .
Similar to two modifications made in (9), the original is first replaced by the sum
of the amount of fuel consumed in each road segment that the vehicle has passed through
from the starting node to the current node. The amount of fuel consumed in road segment
i is equal to the product of its length
and the fuel consumption per kilometer , which is a function of
its average driving speed
for time zone t, as shown in Figure 9 [20]. Then, the heuristic function in the original
is updated as the second term in (10) to find a neighbor node that has the minimal value, that is, the amount of
consumed fuel, for the second term among all neighbor nodes of current node
n. In (10), also denotes the straight-line distance from
node n to the destination,
is the estimated driving speed of the next road segment from current node
n to its neighbor node ,
is the fuel consumption
per kilometer with the estimated driving speed ,
and
()
is the angle between the next road segment and the straight line. To find the next road
segment with the smallest angle with the straight line, we also adopt
as the denominator of the second term in (10):
An example of the relationship between the driving speed and the corresponding fuel
consumption per kilometer [20].
Besides the driving speed, many other factors can influence fuel consumption. They
include route attributes, personal characteristics, trip characteristics, and
environmental conditions [21].
Important fuel mileage tips can help the driver reduce the amount of fuel consumed. For
example, keeping an engine properly tuned and tires inflated to the proper pressure can
improve the fuel mileage up to 40 and 3.3 percent, respectively [22]. Sensible driving can lower the fuel mileage by 33
percent at highway speeds and by 5 percent around town [23]. Observing the speed limit, avoiding excessive
idling, removing excess weight, and using cruise control also improve energy efficiency.
On the other hand, aaMOTION in [24]
proposed mathematical equations to determine the direct vehicle operating
cost by using a cost factor to convert the fuel cost to total running cost
including fuel, repair, and maintenance. Authors in [25] argued that excess fuel consumption may be avoided by
the development of an optimal driving strategy through reducing aggressive driving and
maintaining a steady speed. They considered the optimal driving strategy model as an
optimal control problem, which was then formulated as a constrained optimization
programming subject to speed profile, energy flows, engine load, combustion products,
demand for transport service, and gear ratio selection. Because deriving a precise fuel
consumption model is beyond the scope of this paper, please refer to the related work
for details. Please also note that the fuel consumption function in (10) can be replaced by the
newly developed one to estimate fuel consumption more accurately.
4. System Implementation
This time- and energy-efficient Android GPS navigation app is implemented on the Google
Android 4.1 platform with Eclipse and Android Development Tools (ADT) [26] that support JAVA 1.7. Its main function is to realize
the
algorithm for planning a route to meet one of two criteria, that is, the shortest travelling
time and the lowest fuel consumption. Important snapshots of this app are shown in the
following.
In order to plan a route from the starting location of the vehicle, that is, the blue pin
in Figure 10, its driver first has to
choose the destination location, that is, the red pin in Figure 10, and then press the “Planning” button
at the upper right corner of the app screen. Therefore, the initial planned route from the
starting location to the destination, calculated with the static information of the offline
electronic map, is shown as the purple line in Figure 10. Associated information about this route, such as the
travelling distance, time, amount of fuel consumed, and the average speed, is listed in the
green box by clicking the “Route Information” button. Because no dynamic
traffic information is used to calculate this initial route, the estimated information
listed in parentheses is the same as the original information.
Information of the initial planned route.
According to (8), Figure 11 shows the estimated traffic information
of each road segment in the electronic map, that is, the speed of the next time zone, where
each road segment is colored in green, yellow or red to represent the low,
normal, or high congestion level, respectively, after
the vehicle under navigation has exchanged its recorded traffic information with others.
Details of the exchanged traffic information such as the list of road segments and the
estimated speed of the chosen road segment can be examined, as shown in Figure 11. If too much information has been
exchanged, the driver can use the “search” function to find information on
a specific road segment.
Details of the exchanged traffic information.
When the driver chooses the lowest fuel consumption criterion as the route planning option
in Figure 12 and clicks the
“planning” button again, a new energy-efficient route, drawn as the
indigo line in Figure 13, is dynamically
replanned by the proposed
algorithm to avoid those congested road segments which would cause the vehicle to consume
more fuel. Based on estimated traffic information, new information about this replanned
route is shown in the green box. Though this replanned route has a longer travelling
distance, it achieves a shorter travelling time, lower fuel consumption and higher driving
speed than the original route planned with the static information.
The setup page for route planning options.
The dynamically replanned route based on the exchanged traffic information.
5. Performance Evaluations
5.1. Simulation Environment
In reality, it is hard to execute a large scale evaluation to measure the real travelling
distance, time, speed, and consumed fuel of vehicles navigated by this
and other traditional route planning algorithms. We therefore compare simulation results
of the travelling distance, time, and fuel consumption for six route planning algorithms:
Dijkstra, ,
TTU-
(angle + speed), TTU-
(angle),
(Time), and
(Fuel), using the Opportunistic Network Environment (The ONE) simulator [27]. TTU-
(angle) and TTU-
(angle + speed), which use (2)
and (4), respectively, as
described in Section 2, are two
extended
algorithms proposed in [15].
(Time) and
(Fuel) denote our proposed
algorithms, which satisfy the shortest travelling time and the lowest fuel consumption
criteria, respectively. Simulation parameters used are listed in Table 2. As shown in Figure 14, the electronic map used in this
simulation contains 2742 road segments and 1720 intersections in Taipei City, Taiwan. Each
vehicle follows the IEEE 802.11 MAC protocol with Distributed Coordination Function (DCF)
RTS/CTS enabled and the TwoRayGround physical propagation model with a maximal
transmission range of 250 m. The initial vehicle distribution follows the realistic
vehicle density statistics from the traffic database of the Traffic Engineering Office,
Taipei City Government [28]. As listed
in Table 3, the urban traffic
statuses of four time periods, 07:00~09:00, 12:00~13:00, 17:00~19:00, and 22:00~23:00, in
a day are usually considered as congested, but those of the other four periods are
noncongested. According to the rule that the driving speed in the congested time period is
much lower than the speed limit of the road segment, but that in the noncongested time
period, it is closer to the speed limit, average performance results of 10 vehicles
executing these six route planning algorithms for 20 runs in one congested time period,
time period 1, and one noncongested time period, time period 2, will be compared below.
The destination of each vehicle for navigation is uniformly distributed in the map. The
initial driving speed of the vehicle when the simulation starts is uniformly generated
with the range of , where
denotes the speed limit of road segment i, where the vehicle is initially
located when the simulation begins for time period t. The acceleration of
the vehicle varies uniformly within ±1-2 m/s every minute. However, the instantaneous
speed of every vehicle cannot exceed the speed limit of the road segment it is driving
through. As the first type of traffic information in the
algorithm, the observed driving speeds for all time zones of each time period are
calculated by averaging those generated driving speeds in each time zone, as previously
described. On the other hand, because Google Maps does not provide any formal function to
access its traffic information, we have implemented a preprocessing program to retrieve it
as the second traffic information source of the
algorithm by matching the drawn street maps of Google Maps with the electronic map
used.
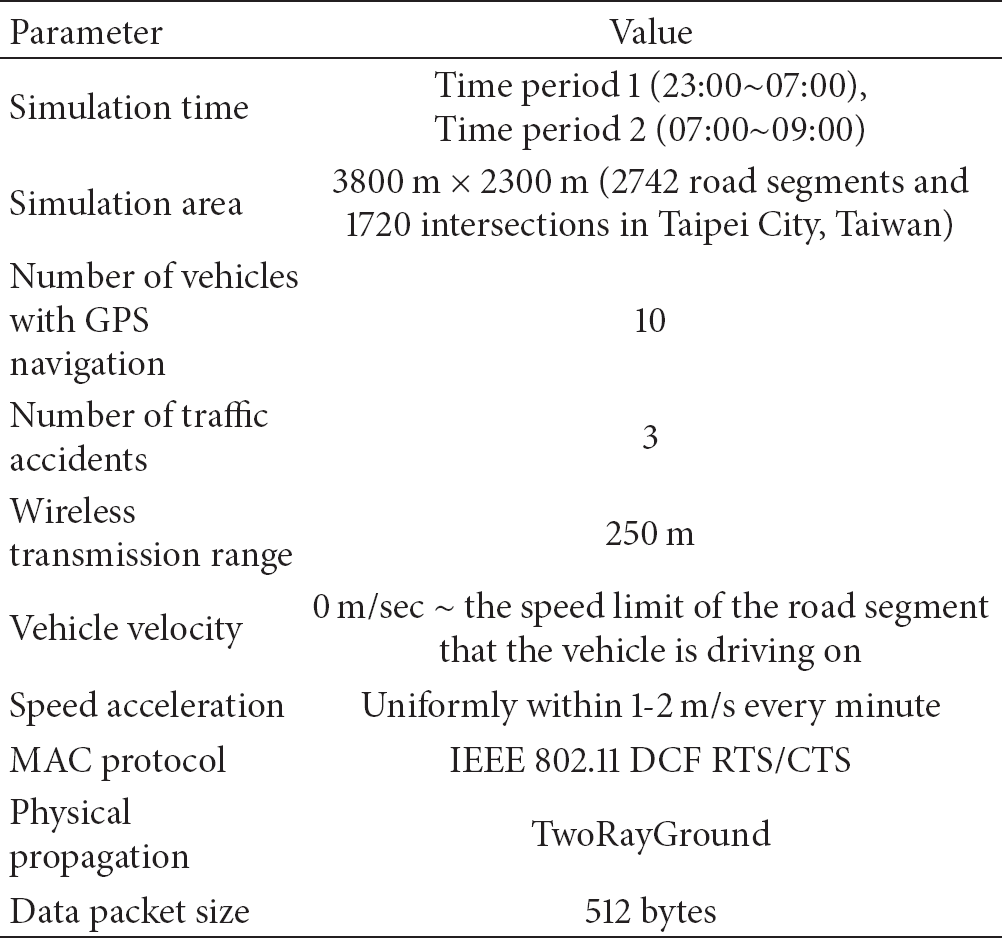
Simulation parameters.
Parameter
Value
Simulation time
Time period 1 (23:00~07:00), Time period 2
(07:00~09:00)
Simulation area
3800 m × 2300 m (2742 road segments and 1720 intersections in
Taipei City, Taiwan)
Number of vehicles with GPS navigation
10
Number of traffic accidents
3
Wireless transmission range
250 m
Vehicle velocity
0 m/sec ~ the speed limit of the road segment that the vehicle
is driving on
Speed acceleration
Uniformly within 1-2 m/s every minute
MAC protocol
IEEE 802.11 DCF RTS/CTS
Physical propagation
TwoRayGround
Data packet size
512 bytes
Eight time periods in a day.
Start time
End time
Traffic status
Time period 1
23:00 pm
07:00 am
Noncongested
Time period 2
07:00
09:00
Congested
Time period 3
09:00
12:00
Noncongested
Time period 4
12:00
13:00
Congested
Time period 5
13:00
17:00
Noncongested
Time period 6
17:00
19:00
Congested
Time period 7
19:00
22:00
Noncongested
Time period 8
22:00
23:00
Congested
The electronic map of Taipei City, Taiwan used in this simulation.
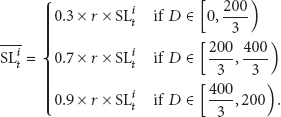
Furthermore, in order to examine the influence of real-time traffic accidents, which
result in the dynamic planning of new routes, on the performances of these six algorithms,
three traffic accidents are generated for a simulation run in a random position on the map
at a random time during the time period. The smaller the straight-line distance between
the center of the road segment and the position of the accident, the lower the driving
speed of this road segment after the accident will be. In order to add this behavior into
our simulation, the new driving speed limit
of road segment i within the distance range D of
, , and meters to the accident
position is reduced from
to ,
,
and ,
respectively, as formulated by (11), where
denotes the original speed limit of road segment i at time period
t when no accident has occurred, and r
()
is the ratio of the new driving speed limit over the original one. In the simulation,
values of r are set as 0.2, 0.4, 0.6, and 0.8, respectively:
5.2. Simulation Results
Four performance metrics of six route planning algorithms, that is, the average
travelling time, distance, speed, and
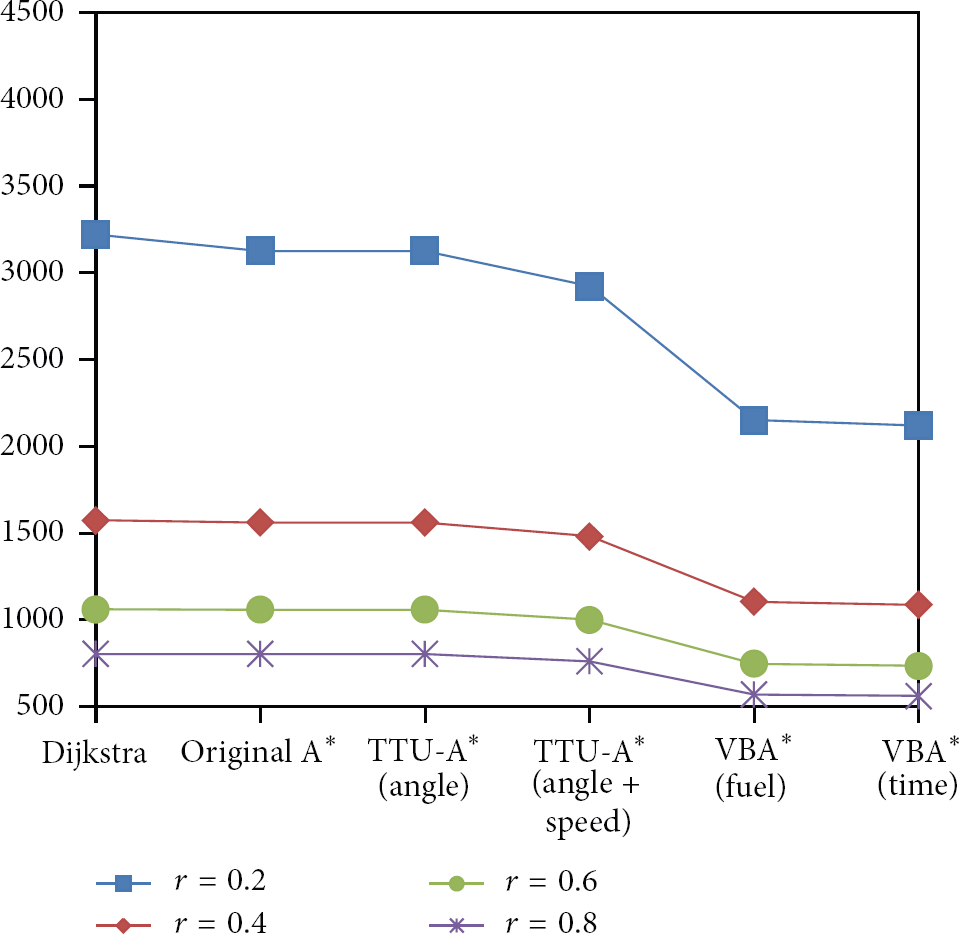
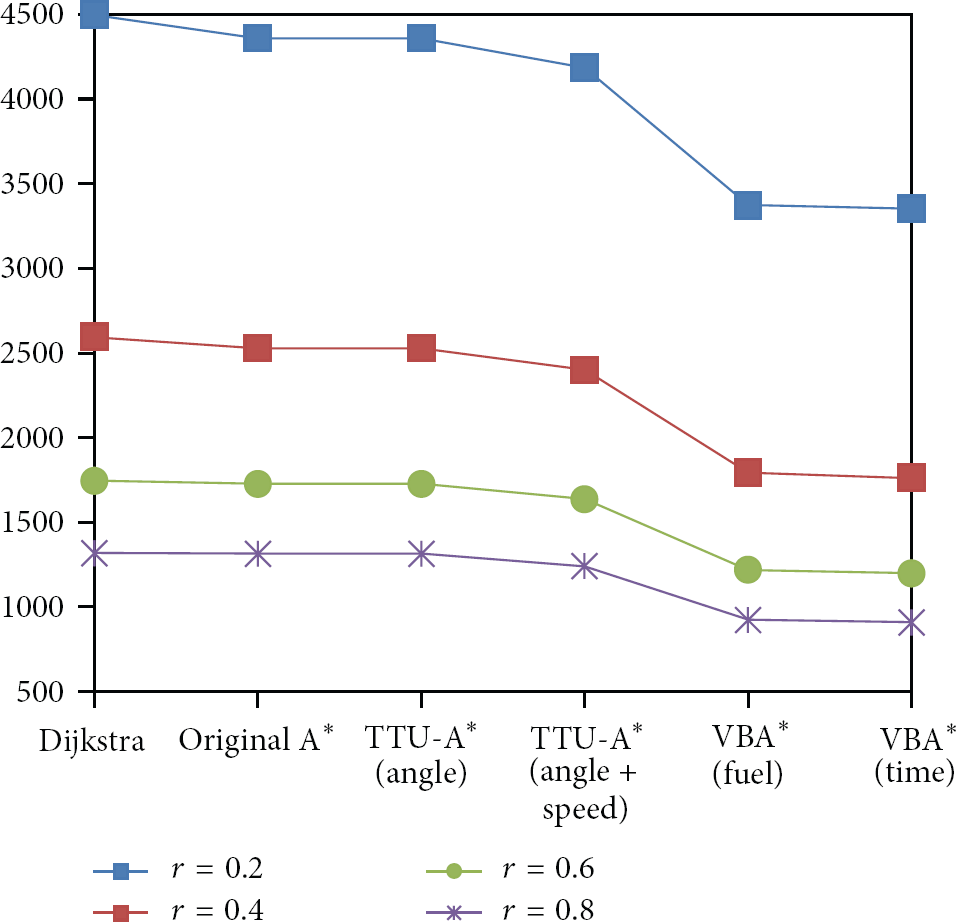
fuel consumption, are compared below. First, Figures 15 and 16 show the results of their average travelling
times with four different r values in Time Periods 1 and 2,
respectively. No matter which r value is used in the simulation, the
average travelling times of Dijkstra, Original ,
and TTU-
(angle) are the highest of the six algorithms because their design criteria are focused on
finding the route with the shortest travelling distance instead of that with the smallest
travelling time. TTU-
(angle + speed) gives higher weights to road segments with higher driving speeds and
smaller angles to the destination, which in turn reduces its travelling time. On the other
hand, with the modified heuristic function for finding a neighbor node
that contributes the minimal travelling time to among all neighbor nodes of
current node n in (9),
(time) achieves the smallest average travelling time of all the algorithms. Though the
modified term of
(fuel) in (10) tries to find
a neighbor node that has the minimal amount of consumed fuel among all neighbor nodes of
current node n,
(fuel) achieves a lower average travelling time than the other four algorithms. This is
because the fuel consumption per kilometer is highly dependent on the estimated driving
speed of the vehicle; the route found by
(Fuel) with the lowest amount of fuel consumption is the route with the highest driving
speed, when the speed is below 79 km/hr as shown in Figure 9. Furthermore, because r is the ratio
for reducing the speed limit of the road segment near the accident, a lower
r value incurs a lower speed limit after the accident and a higher
average travelling time for each algorithm. Finally, the travelling speed on each road
segment in time period 1, that is, the noncongested time period, is usually lower than
that in time period 2, that is the congested time period. Therefore, the average
travelling times of all algorithms in Time Period 1 are much lower than those in Time
Period 2, as shown in Figures 15 and
16. By normalizing the average
travelling time of each algorithm over that of Dijkstra, Table 4 lists the improved portion of each algorithm on the
average travelling time. The proposed
(time) and
(fuel) reduce at least 25.5% and 24.98% of the average travelling time of Dijkstra,
respectively, when in
time period 2, which are much higher than those of ,
TTU-
(angle + speed), and TTU-
(angle).
Ratios of the average travelling time of each algorithm over that of Dijkstra.
Time period 1,
Time period 1,
Time period 1,
Time period 1,
Time period 2,
Time period 2,
Time period 2,
Time period 2,
TTU-A* (angle + speed)
90.78%
94.14%
94.36%
94.63%
93.07%
92.56%
93.85%
94.11%
TTU-A* (angle)
97.11%
99.24%
99.80%
100.00%
96.92%
97.48%
99.01%
99.82%
VBA* (fuel)
66.77%
70.08%
70.34%
70.91%
75.02%
69.18%
69.83%
70.14%
VBA* (time)
65.80%
68.95%
69.22%
69.80%
74.50%
67.92%
68.79%
68.96%
Original A*
97.11%
99.24%
99.80%
100.00%
96.92%
97.48%
99.01%
99.82%
Dijkstra
100.00%
100.00%
100.00%
100.00%
100.00%
100.00%
100.00%
100.00%
The average travelling time (second) of time period 1.
The average travelling time (second) of time period 2.
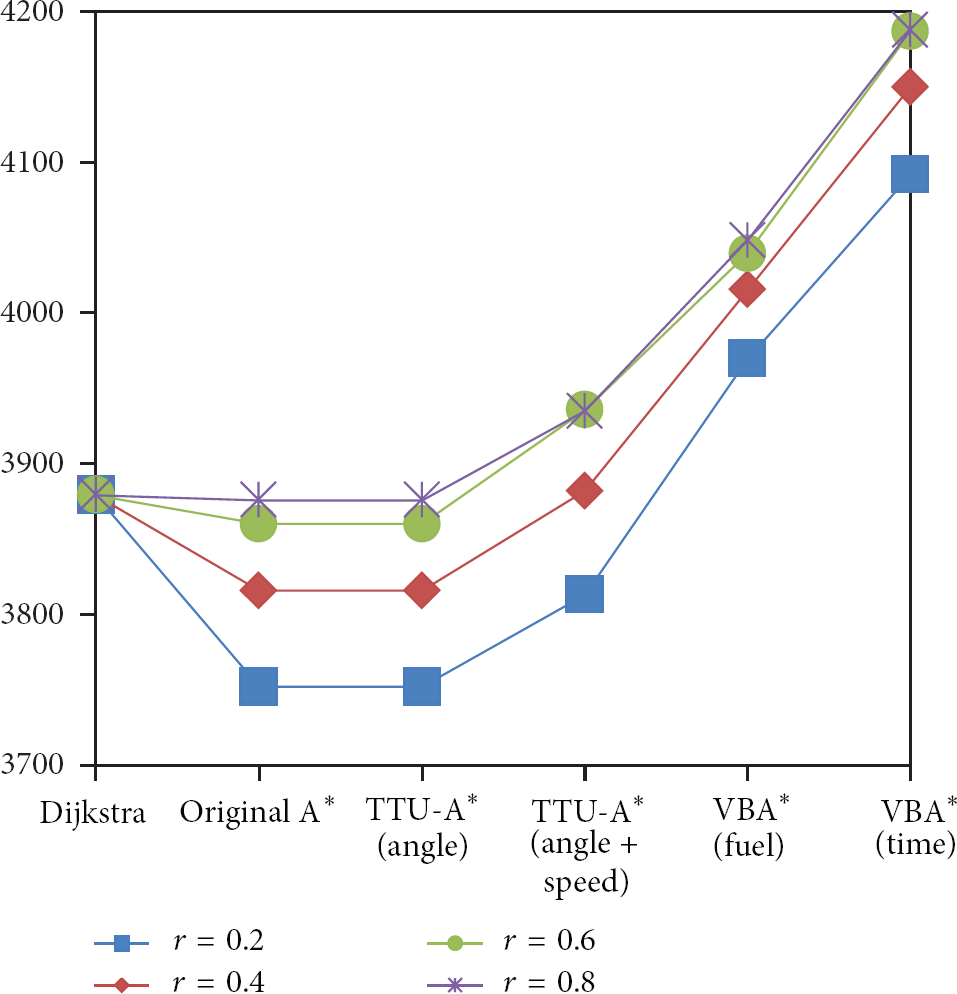
In Figures 17 and 18,
(fuel) consumes the least fuel of the six algorithms because it has modified
in (10) to find a neighbor node that
has the minimal amount of consumed fuel among all neighbor nodes of current node
n. As listed in Table 5, it achieved 6% ()
to 17% ()
and 1% ()
to 16% ()
reductions on fuel consumption in time period 1 and time period 2, respectively.
(time) also has lower fuel consumption than the other four algorithms because it can find
the route with the smallest average travelling time, that is, the route with the highest
average speed, and in turn, the lowest fuel consumption if the travelling distance of the
route is fixed. On the other hand, TTU-
(angle) and TTU-
(angle + speed) only show 2.7% and 2.3% reductions of the fuel consumption of Dijkstra in
time period 1 and time period 2, respectively, when r is equal to 0.8,
which are listed in Table 5. As
previously mentioned, because r is the ratio for reducing the speed limit
of the road segment near the accident, a lower r value incurs a smaller
speed limit after the accident and a higher average fuel consumption for each algorithm.
Finally, the travelling speed on each road segment in time period 1 is usually lower than
that in time period 2. Therefore, the average fuel consumption of each algorithm in time
period 1 is less than that in time period 2, as shown in Figures 17 and 18.
Ratios of the average fuel consumption of each algorithm over that of Dijkstra.
Time period 1,
Time period 1,
Time period 1,
Time period 1,
Time period 2,
Time period 2,
Time period 2,
Time period 2,
TTU-A* (angle + speed)
98.45%
98.15%
97.37%
97.32%
97.74%
98.18%
98.44%
97.69%
TTU-A* (angle)
98.34%
99.44%
99.86%
100.00%
96.90%
98.21%
99.41%
99.88%
VBA* (fuel)
94.12%
85.91%
82.93%
83.46%
98.96%
92.14%
87.01%
84.10%
VBA* (time)
96.46%
87.21%
83.82%
84.49%
101.68%
94.26%
88.69%
85.25%
Original A*
98.34%
99.44%
99.86%
100.00%
96.90%
98.21%
99.41%
99.88%
Dijkstra
100.00%
100.00%
100.00%
100.00%
100.00%
100.00%
100.00%
100.00%
The average fuel consumption (mL) of time period 1.
The average fuel consumption (mL) of time period 2.
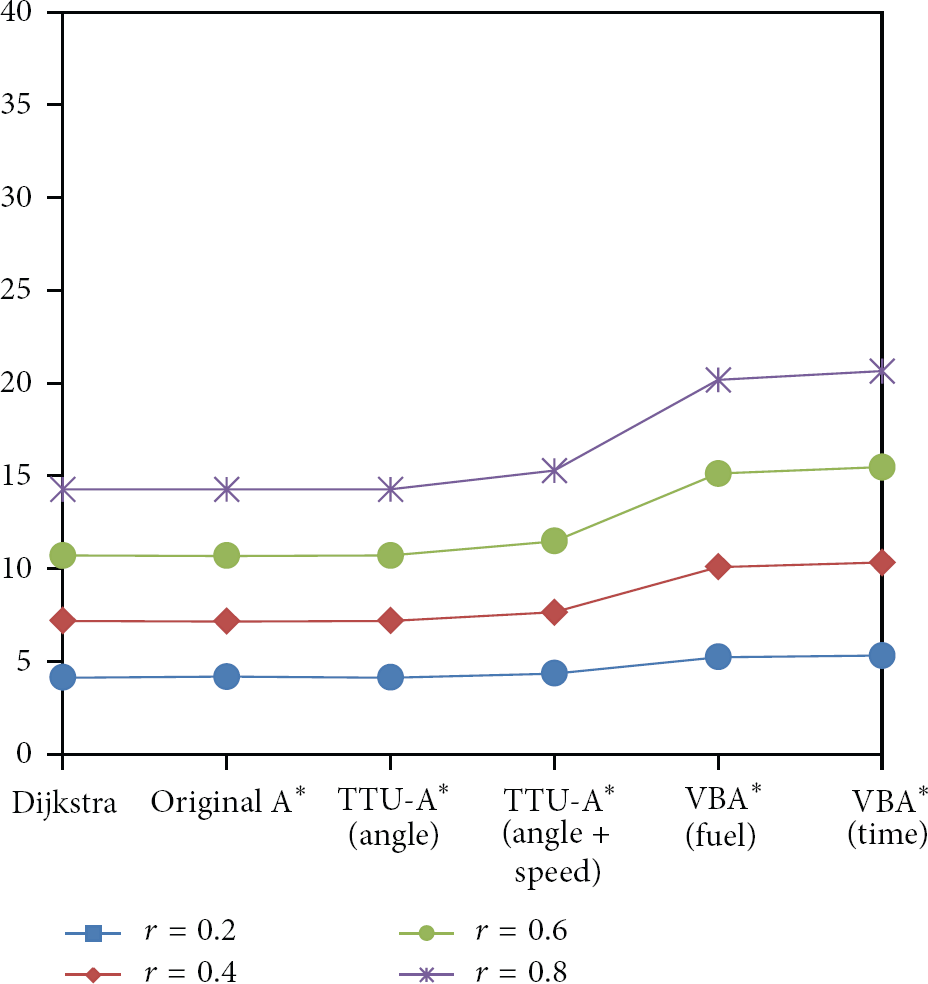
As shown in Figures 19 and 20, original
and TTU-
(angle) have the shortest travelling distances of all algorithms in both time period 1 and
time period 2 because they focus on finding the shortest route. Though
(fuel) and
(time) have the longest travelling distances, which are at most 4.4% and 8% higher than
that of Dijkstra, as listed in Table 6, they can meet the lowest fuel consumption and the shortest travelling time
criteria, respectively, as previously shown. This behavior can be explained by Figures
20 and 21, which show that
(fuel) and
(time) have the highest average travelling speeds of all algorithms in both time periods.
As listed in Table 7, their average
travelling speeds are at least 44.6%/41.4% and 27.4%/25.4% higher than those of Dijkstra
in time period 1 and time period 2, respectively. This means that both algorithms are able
to choose a road segment that has a high travelling speed in order to reduce the
corresponding travelling time and fuel consumption, even though the travelling distance is
greater. Furthermore, because r is the ratio for reducing the speed limit
of the road segment near the accident, a lower r value incurs a lower
average travelling distance, shown in Figures 19 and 20, and a new lower
speed limit and average travelling speed, shown in Figures 21 and 22, after the accident for each algorithm. Finally, the average travelling
distances and speeds of all algorithms in time period 2 are lower than those in time
period 1 due to the higher degree of traffic congestion in time period 2.
Ratios of the average travelling distance of each algorithm over that of
Dijkstra.
Time period 1,
Time period 1,
Time period 1,
Time period 1,
Time period 2,
Time period 2,
Time period 2,
Time period 2,
TTU-A* (angle + speed)
100.34%
101.43%
101.50%
101.53%
98.29%
100.07%
101.46%
101.44%
TTU-A* (angle)
98.50%
99.50%
99.91%
100.00%
96.72%
98.36%
99.50%
99.92%
VBA* (fuel)
103.61%
104.34%
104.36%
104.36%
102.33%
103.51%
104.14%
104.36%
VBA* (time)
107.04%
107.95%
107.95%
107.95%
105.48%
106.98%
107.93%
107.95%
Original A*
98.50%
99.50%
99.91%
100.00%
96.72%
98.36%
99.50%
99.92%
Dijkstra
100.00%
100.00%
100.00%
100.00%
100.00%
100.00%
100.00%
100.00%
Ratios of the average travelling speed of each algorithm over that of Dijkstra.
Time period 1,
Time period 1,
Time period 1,
Time period 1,
Time period 2,
Time period 2,
Time period 2,
Time period 2,
TTU-A* (angle + speed)
108.95%
107.10%
107.08%
107.06%
104.44%
106.79%
107.31%
107.14%
TTU-A* (angle)
100.62%
100.06%
100.05%
100.00%
99.01%
100.39%
100.15%
100.04%
VBA* (fuel)
144.21%
141.39%
141.40%
141.40%
125.44%
141.06%
141.41%
141.40%
VBA* (time)
147.45%
144.64%
144.64%
144.64%
127.44%
144.26%
144.64%
144.64%
Original A*
100.62%
100.06%
100.05%
100.00%
99.01%
100.39%
100.15%
100.04%
Dijkstra
100.00%
100.00%
100.00%
100.00%
100.00%
100.00%
100.00%
100.00%
The average travelling distance (m) of time period 1.
The average travelling distance (m) of time period 2.
The average travelling speed (km/hr) of time period 1.
The average travelling speed (km/hr) of time period 2.
6. Conclusion and Future Work
In this paper, a
route planning algorithm has been proposed to dynamically calculate the route that meets the
shortest travelling time or the lowest fuel consumption criteria. It adopts two real-time
traffic information sources, the recorded and exchanged traffic information of the road
segment that the vehicle has passed through and traffic information from Google Maps, to
find a better route than traditional algorithms that adopt static information only.
Snapshots of the implemented GPS navigation app, running on the Android platform to realize
the
route planning algorithm, are shown. Finally, simulation results of
show its significant reductions in both the average travelling time and fuel consumption of
the planned route, as compared to traditional route planning algorithms in both congested
and noncongested time periods. In future, large scale simulations based on real traffic
traces will be executed to observe whether
still outperforms traditional algorithms, and to what extent it does so.
Footnotes
Acknowledgment
This work was supported by the National Science Council (NCS), Taiwan, under Grant no.
NSC101-2815-C-018-018-E.
References
1.
Hofmann-WellenhofB.LichteneggerH.CollinsJ.Global Positioning System. Theory and Practice1993Wien, AustriaSpringer
2.
KopitzD.MarksB.RDS: The Radio Data System1998London, UKArtech House Books
LuS.-P.LiK.-M.HsiehC.-Y.The study of dynamic navigation with WAVE/DSRC in VANETsProceedings of the International Computer Symposium (ICS '10)December 20105245282-s2.0-7985150331110.1109/COMPSYM.2010.5685457
6.
RudackM.MeinckeM.LotfM.On the dynamics of Ad Hoc networks for inter vehicle
communicationProceedings of the International Conference on Wireless Networks (ICWN
'02)2002Las Vegas, Nev, USA
7.
ChangI.-C.WangY.-F.ChouC.-F.Efficient VANET unicast routing using historical and real-time traffic
informationProceedings of the 17th IEEE International Conference on Parallel and
Distributed Systems (ICPADS '11)December 2011Tainan, Taiwan4584642-s2.0-8485662517810.1109/ICPADS.2011.57
8.
JohnsonD. B.A note on dijkstra's shortest path algorithmJournal of the ACM1973203385388
9.
DechterR.PearlJ.Generalized best-first search strategies and the optimality of
A*Journal of the ACM19853235055362-s2.0-002209420610.1145/3828.3830
10.
SathyarajB. M.JainL. C.FinnA.DrakeS.Multiple UAVs path planning algorithms: a comparative studyFuzzy Optimization and Decision Making2008732572672-s2.0-4914912945110.1007/s10700-008-9035-0
11.
BellM. G. H.Hyperstar: a multi-path Astar algorithm for risk averse vehicle
navigationTransportation Research Part B2009431971072-s2.0-5504909463510.1016/j.trb.2008.05.010
12.
SchmittE. J.JulaH.Vehicle route guidance systems: classification and
comparisonProceedings of the IEEE Intelligent Transportation Systems Conference (ITSC
'06)September 20062422472-s2.0-41849120808
LucasJ. M.SaccucciM. S.Exponentially weighted moving average control schemes. Properties and
enhancementsTechnometrics19903211122-s2.0-0025387954
15.
HuangY. Pi.TsaiC. S.ChangJ.The study of better route planning based on improved A* algorithm [M.S.
thesis]2009Taipei, TaiwanDepartment of Computer Science and Engineering, Tatung
University
YamashitaT.IzumiK.KurumataniK.Car navigation with route information sharing for improvement of traffic
efficiencyProceedings of the 7th International IEEE Conference on Intelligent
Transportation Systems (ITSC '04)October 20044654702-s2.0-13344269621
18.
LakasA.ShaqfaM.Geocache: sharing and exchanging road traffic information using
peer-to-peer vehicular communicationProceedings of the IEEE 73rd Vehicular Technology Conference (VTC
'11)May 20112-s2.0-8005201168110.1109/VETECS.2011.5956785
SakdaP.CharnwetH.ChakrapanT.Development of SIDRA-TRIP integrated GPS model to evaluate fuel
consumption/emission on expressway and alternative roadProceedings of the 17th ITS World Congress2010Busan, South Korea
AkcelikR.BesleyM.Operating cost, fuel consumption, and emission models in aaSIDRA and
aaMOTIONProceedings of the 25th Conference of Australian Institutes of Transport
Research (CAITR '03)2003
25.
SaboohiY.FarzanehH.Model for developing an eco-driving strategy of a passenger vehicle based
on the least fuel consumptionApplied Energy20098610192519322-s2.0-6464910275210.1016/j.apenergy.2008.12.017