
Abstract
This paper deals with the problem of localization of mobile robot in indoor environment with mixed line-of-sight/nonline-of-sight (LOS/NLOS) conditions. To reduce the NLOS errors, a prior knowledge-based correction strategy (PKCS) is proposed to locate the robot. This strategy consists of two steps: NLOS identification and mitigation. We propose an NLOS identification method by applying the statistical theory. Then we correct the NLOS errors by subtracting the expected NLOS errors. Finally, the residual weighting algorithm is employed to estimate the location of the robot. Simulation results show that the proposed strategy significantly improves the accuracy of localization in mixed LOS/NLOS indoor environment.
1. Introduction
Indoor robot has been widely applied in health care, smart home, and emergency supporting. Location information is very important for mobile robot [1]. Due to the fact that GPS (Global Positioning System) does not work in indoor environment, so the indoor localization has motivated increased research interest. Since the Wireless Sensor Network (WSN) can be deployed quickly and flexible, so WSN is an effective application for indoor localization.
Recently, many indoor localization systems have been developed based on different wireless measurements: received signal strength (RSS) [2], time of arrival (TOA) [3], angle of arrival (AOA) [4], and time difference of arrival (TDOA) [5]. A mobile robot can estimate its location based on the wireless measurements with some beacon nodes whose locations are known prior. TDOA and AOA methods are energy-consuming resolution and they require extra hardware. TOA needs the high precision clock to achieve clock synchronization. So the above three methods are not suit for low configured sensor node. As an inexpensive approach, RSS has established the mathematical model on the basis of path loss attenuation with distance, and it requires relatively low configuration and energy. In this paper, we employ RSS localization method because of its characteristics. However, due to the complex indoor environment where walls and other obstacles are present, the wireless channel will always be blocked. The NLOS environment causes the radio signal to propagate a longer path than the true distance between the beacon nodes and target (e.g., robot or unknown node) due to the reflection and diffraction. So it induces the degradation of the localization accuracy. Thus, indoor localization which is robust to the NLOS environment is required [6]. In the presence of obstacles, the major positioning errors are from the measurements errors and NLOS propagation errors. And the NLOS effect leads to large localization errors if we do not consider it in the localization method.
For the purpose of realizing robust localization in NLOS environment, we propose a localization method using RSS measurement. And this method consists of four steps: NLOS identification, NLOS correction, Kalman filter, and residual weighting algorithm.
Several previous works have been investigated the localization algorithm in NLOS environment. The localization methods in NLOS environment can be categorized as nonparametric method and parametric method. For the nonparametric method, Chen [7] proposes a residual weighting algorithm to alleviate the NLOS errors in the location estimate. This method employs the least squares on all possible combinations of distance measurements and then calculates the final position as a weighted combination of these intermediate estimates. The computational complexity of this method grows exponentially with the number of measurements. A robust multilateration algorithm [8] is introduced in NLOS environment. This algorithm is robust in comparison with traditional least squares multilateration. However, the performance of this method is severely affected by the number of NLOS measurements. Least squares support vector machine [9] classifier is employed to distinguish LOS/NLOS propagation and further mitigate the ranging errors in NLOS conditions. For the parametric method, the additive noise in the range measurement is characterized by different noise distributions corresponding to LOS and NLOS errors. In [10], Borras et al. propose a binary hypothesis test method to identify the NLOS measurements. In [11], Mazuelas et al. propose a prior NLOS measurements correction method to correct the measurements from NLOS propagation. Most of above works focus on the UWB system. But this system is not suit for WSN which consists hundreds of sensor nodes in the monitoring field.
Since the relatively low configuration and cost, RSS-based localization techniques have drawn considerable research interest [12]. An environment-adaptive method is investigated [13] that is tolerant to parameter variations caused by environmental variations. A sigma-point Kalman smoother-(SPKS) based location and tracking algorithm is proposed [14] for RSSI-based positioning and tracking. However, all of the above methods only consider the LOS environment. Fewer papers investigate the RSS-based localization method in NLOS environment.
In this paper, we firstly investigate the RSS-based NLOS identification method using the recorded measurements. Then the ratio of NLOS present in the record of measurements and the expectation of the NLOS errors are used to mitigate the NLOS errors. Kalman filter is employed to improve the estimated range. Finally, we use the residual weighting algorithm to estimate the location of the robot.
This paper is organized as follows. In Section 2, we introduce range estimation model. NLOS identification, NLOS mitigation, and localization method are presented in Section 3. Some simulation results present in Section 4. The conclusions are given in Section 5.
2. Range Estimation Model
The robot carries a sensor node which is used to communicate with the beacon nodes in the WSN. The beacon nodes emit signal continually. The robot estimates the distance between beacon node and the robot through received signal strength. The most widely applied signal propagation model is the log-normal shadowing model. The received signal strength of the robot from mth beacon node [15] is

From (1), the estimated range between the mth beacon node and the robot can be expressed as

We can approximately obtain that [16]
So the estimated range can be rewritten as

Based on this range estimation model, we investigate NLOS identification when the obstacles present and propose a prior knowledge-based correction strategy (PKCS) to mitigate NLOS errors. The proposed method can be used to localize the mobile robot in indoor environment. This strategy will improve the localization accuracy.
3. NLOS Identification and Mitigation
The propagation conditions can change from LOS to NLOS when the robot is moving in the indoor environment. The NLOS propagation generally leads to a positive bias in the estimation range and causes a serious error in location estimation. So we should firstly identify the propagation conditions and then to mitigate the NLOS errors.
We make the following assumptions in the study. There are M beacon sensors and one robot in the field. The beacon nodes emit radio signal which attenuates inside the area under observation. The intensity of a signal emitted omni-directionally. The robot receives the radio and estimates the distance between the beacon node and the robot according to (3).
In this section, we propose a strategy for robot localization in NLOS environment. We firstly employ the polynomial fit to smooth the measurements, and then the average deviation between the smoothed curve and measurements and the standard deviation of the LOS noise are used to identify the NLOS measurements. Secondly, we estimate the NLOS ratio in the measurements to determine which measurements contain the NLOS errors, and then mitigate the NLOS measurements errors through subtracting the expectation of NLOS errors. Kalman filter is introduced to improve the estimated range. Finally we use the residual weighting (Rwgh) algorithm to estimate the location of the robot. The flowchart of the proposed algorithm is given in Figure 1.

The architecture of the proposed algorithm frame.
3.1. NLOS Identification
In order to identify the NLOS measurements, we consider the historical measurements from each beacon node individually. Based on the measurements of beacon node during a period of time and the standard deviation of the LOS noise, we determine whether the measurements contain the NLOS errors. We select a short period of time

We can determine that the data have affected by NLOS if the standard deviation is much larger than the standard deviation of the LOS noise. But the value of
At mth beacon node, the measurements are smoothed as
So the standard deviation of the measurements can be rewritten as
Because the NLOS errors are uncorrelated in time, so the measured data will have a significantly larger average deviation from the smoothed curve when the NLOS errors present. The algorithm requires comparison of the deviation S and the standard deviation of the LOS noise. If
3.2. NLOS Mitigation
When the NLOS is present, the measured data will deviate from the smoothed curve largely. In order to mitigate the NLOS errors, we must know which measurements are affected by NLOS. We firstly estimate the percentage of measurements in our records which are corrupted by NLOS errors during the sample period. Then we determine which measurements are corrupted by NLOS errors. Finally, an NLOS mitigation algorithm is proposed in this subsection.
If the measurements are affected by NLOS,


Since
From (9), it can be seen that the X and Y follow noncentral chi-square distribution:
Therefore the expectation of the deviation can be presented as

When the number of sample N is large, (10) can be rewritten as:

The variance of

When N is relatively large, variance of

Assume that
The percentage of measurements corrupted by NLOS errors is given by

Then we estimate which measurements are corrupted by NLOS errors after the percentage of measurements which have NLOS errors is obtained.
As we know,

3.3. Kalman Filter
The KF is one of the popular filtering methods developed and it, as well as its descendants, has been the dominate filter type for the past 40 years. Most localization systems use Kalman filter for state estimation. Kalman filter produces optimal estimates when measurement noise is Gaussian and stationary. It can be executed within a computer and iteratively without any extensive modification or special hardware. We perform the Kalman filter for the measurements in LOS and the corrected measurements in NLOS. The state equation of mth beacon node under LOS/NLOS environment can be expressed as follows:


The measurement equation of sensor m under LOS/NLOS environment can be expressed as follows:

We can obtain the predicted state and prediction covariance as follows:



Then we can obtain the updated state estimate and updated estimate covariance as follows:

The ranging estimation in Kalman filter is expressed as:

3.4. Location Estimation
The outputs of Kalman filter are the estimated distances between the robot and beacon nodes. According to the estimated distances, we can locate the robot in the field. In this section, we introduce residual weighted localization method to estimate the location of the robot.
The Conventional Residual Weighting algorithm can be described as follows [7].
Make initialization with For each beacon node index set, we employ the maximum likelihood method to estimate the location of the robot which can be represented as Find the final estimated location of the robot as the weighted linear combination of the intermediate estimations from step (b). The weight is inversely proportional to


4. Performance Evaluation and Analysis
In this section, we evaluate the performance of the NLOS localization method described in the previous sections through simulations. Table 1 presents the default parameter values in the experiments. We consider a 200 m × 160 m area with six beacon nodes, and the robot moves in the field. There are two obstacles in the field. In each simulation case, 2000 Monte Carlo runs are performed with the same parameters. The performance of the proposed algorithm is measured by average localization error as

Default parameter values.

In this section, we compare the proposed algorithms (PKCS-ML and PKCS-Rwgh) with the naïve ML and Rwgh algorithms. All of the four algorithms employ the Kalman filter to improve the estimated range.
In Figure 2, we compare the localization results between the Rwgh and PKCS-Rwgh algorithm. Figure 2(a) shows the sight state with respect to all the beacon nodes in sample points. We can see that the sight states vary with time. A mobile localization is shown in Figure 2(b). This figure compares the true trajectory between the estimated one obtained by Rwgh and another obtained by our method. The localization errors can be appreciated by looking at the lines that connect the true and the estimated positions. In Figure 2(c), we can obtain the detailed localization errors in each sample point. It can be observed that the proposed method has better performance in comparison with Rwgh in most of the sample points.

(a) The sight state in each sample point, (b) example of the mobile localization, (c) the localization errors in each sample point.
In Figure 3, the number of beacon nodes is varied from 4 to 8. The MLE and Rwgh methods with the prior knowledge-based correction strategy are called PKCS-MLE and PKCS-Rwgh, respectively. The results show that the effect of increasing the number of beacon nodes is higher using MLE method in comparison with the Rwgh method. However, the PKCS-MLE and PKCS-Rwgh methods have higher localization accuracy compared with MLE and Rwgh methods.

Average localization error versus the number of beacon nodes.
Figure 4 shows the average localization error versus the standard variance of LOS noise. The PKCS-MLE and PKCS-Rwgh methods demonstrate similar robustness against the standard variance of LOS noise. The localization errors of the MLE are always larger than 4 m and increase significantly as the standard variance of LOS noise increases. Due to the PKCS, the performance of PKCS-MLE and PKCS-Rwgh methods outperforms the MLE and Rwgh methods.
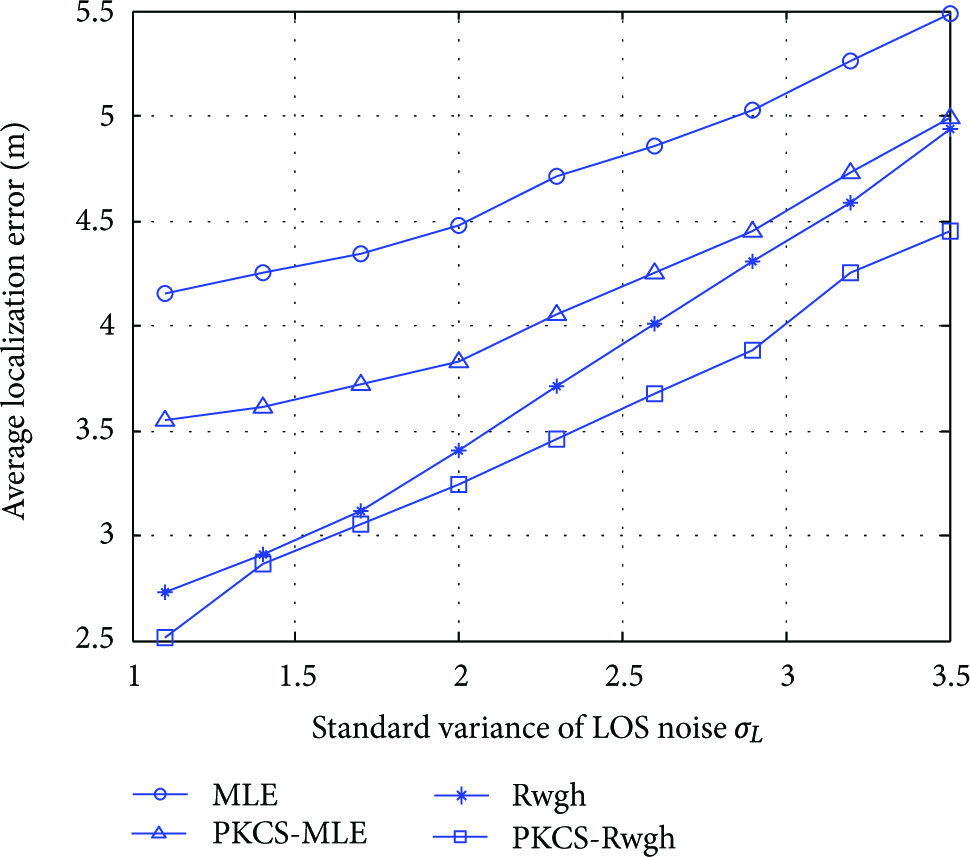
Average localization error versus the standard variance of LOS noise.
To investigate the robustness of the proposed method, we evaluate it under different standard variances of NLOS noise. In Figure 5, it is obvious that the average localization error increases with the increment of standard variance of NLOS noise. We can see that the localization accuracy of PKCS-MLE is improved significantly in comparison with MLE. And the PKCS-Rwgh has 6.87% higher localization accuracy than Rwgh.

Average localization error versus the standard variance of NLOS noise.
In Figure 6, we show the average localization error versus mean of NLOS noise. The accuracy of all methods is decreased with the increase of mean of the NLOS noise. We can see that the proposed method can significantly improve the location estimation accuracy by subtracting the expectation of NLOS errors. And the average localization error of MLE and Rwgh methods are worse without prior knowledge-based correction strategy.

Average localization error versus the mean of NLOS noise.
5. Conclusion
An NLOS correction approach has been proposed to locate the position of mobile robot in order to alleviate the NLOS errors which arise in clustering environment. We consider the prior knowledge of the errors to identify the NLOS and then remove the NLOS errors by subtracting the expectation of NLOS errors. This method could mitigate the NLOS propagation effect. Simulation results show that the PKCS has much better performance than those methods without the correction method and significantly improves the localization accuracy.
Footnotes
Acknowledgments
This work was supported by the National High-Tech Research and Development Plan of China under Grant no. 2010AA101702 and the National Natural Science Foundation of China under Grants nos. 60774010 and 60274009.