
Abstract
Research studies on smart cities have been conducted, which will enable a better management of the available resources. Industrial wireless sensor networks (IWSNs) are important part of smart city. IWSNs are used for process measurement and control applications in harsh and noisy industrial environments. As substitutes for traditional wired industrial networks, IWSNs are more flexible, scalable, and efficient. However, resource limitation of the sensor nodes and unreliability of low-power wireless links, in combination with stringent quality of the service (QoS) requirements of industrial applications, imposes many challenges in designing efficient routing for IWSNs. Existing standards propose a simple and reliable routing mechanism named graph routing. In this paper, we propose novel routing algorithms to discover reliable paths and construct reliable routing graphs. In our approaches, the centralized manager selects parent nodes for each node in the network to satisfy reliability requirements of the intended application. We try to maximize the number of reliable nodes and change the parent nodes selection strategy along with the link quality and the link correlation. Our design is evaluated using simulation where we show that our algorithm could achieve a balance between routing reliability and overhead.
1. Introduction
The ubiquitous computing research studies and the deployment of urban wireless infrastructures make smart cities take shape [1–5]. The concept of smart cities is a natural evolution of research studies about smaller-scale smart spaces [6, 7]. Research studies on smart cities have been conducted by not only some organizations but also several governments. Smart cities form advanced collaborations to optimize resource allocation by monitoring the urban environment, collecting and conveying information, and establishing automated control. Wireless sensor networks (WSNs) can be used to integrate with the surrounding environment and interact with the management system. In smart cities, IWSNs as a smaller smart space can intercommunicate and interoperate with other networks of smart cities providing a unified and personalized interface for their managers.
IWSNs are new industrial networks appearing after field bus in industrial control field [8–13]. IWSNs should be designed specifically due to the extreme industrial environments and the stringent industrial application requirements. WirelessHART [14] approved by IEC is the first global industrial wireless communication standard. It is the extension of wired HART for wireless process monitoring and control. On September 6, 2011, ISA-100.11a [15] is recognized by IEC as a new standard for process automation (PA) and factory automation (FA). Nowadays, more and more research studies about IWSNs have emerged.
In industrial systems, the existing standards advocate centralized control. Unlike the distributed control adopted by the traditional WSNs, IWSNs push the complexity of ensuring reliable and accurate data transfers to the centralized manager. The construction of the global reliable routing is performed by the centralized manager to meet stringent requirements [16–18]. The centralized control could achieve relatively complicated algorithms and makes control decisions based on the whole network's information. Therefore, the centralized control could improve network performance by global information and globally optimal control laws.
In typical IWSNs, each field device collects data and publishes its data to the manager, and then the manager dispatches the control messages to field devices periodically. The broadcast messages are propagated through the network to configure the node information. Uplink has a sample rate of each device to transmit its process message to the centralized manager. The broadcast and uplink traffic in industrial applications is mainly a cyclical communication with a predicable interval. In some situations, the manager needs to generate downlink path for each device to forward specific control messages. For industrial control communication, lost packets may lead to industrial application malfunction. But there are many challenges for industrial field devices to achieve reliable transmission. On the one hand, too many wireless devices in the 2.4 GHz frequency band likely cause mutual interference. On the other hand, the industrial environment is extremely severe which may lead to signal reflection and scattering. How to satisfy the reliability requirements is a challenging problem in routing algorithm.
A simple and reliable routing mechanism named graph routing is presented by ISA 100.11a [15] and WirelessHART [14]. However, these current standards do not specify a routing algorithm. How to construct a reliable graph has not received enough attention and how to satisfy the strict reliability requirements in the graph routing is still a challenge. Now several research works have been devoted on the reliable graph routing [19–21]. But existing approaches educe the routing graphs based on the fixed routing strategy, which may decrease flexibility to balance communication performances. We hope that the routing strategy could decrease overhead while the reliability can be guaranteed. Therefore, we present flexible route selection algorithms which consider the reliability requirement together with network overhead. The route selection of each node depends on the link quality with neighbor node. In a word, we propose the efficient algorithms to construct reliable graphs: determining the routing that (1) achieves the maximum proportion of nodes which successfully transmit packets to the destination node (2) and a tradeoff between the reliable routing and the network overhead.
In this paper, our algorithms choose reliable parent nodes to construct reliable graphs. We maintain maximum number of reliable nodes and present an evaluation method of node reliability. The remainder of this paper is organized as follows. Section 2 presents related works of reliable routing. Section 3 introduces the architecture of IWSNs. Section 4 describes the proposed centralized reliable graph routing. This section details how to construct reliable graphs. Section 5 presents the performance of our approach compared with other graphs. Finally, we conclude our approach and summarize the future work in Section 6.
2. Related Works
In this section, we first present previous works about reliable routing in wireless sensor networks (WSNs). Then two routing approaches defined by existing industrial standards are described.
2.1. Reliable Routing in Wireless Sensor Networks
IWSNs are meant for industrial measure and control with high reliable requirements. Link error is usually due to network congestion, node failure, signal interference, and so on. How to select a reliable path is an important research for routing protocols. We also focus on how to repair path if route entries become invalid.
Some routing protocols regard link error rate as a routing metric for reliability [22, 23]. In [22], energy-aware routing taking into account the retransmission can choose a reliable path by energy cost. Because link error rate can cause the potential energy cost. In [23], the source node sends a redundant packet via alternate path to achieve reliability sometimes. If the reliability of the selected path does not meet the requirements, the source node will randomly select one additional successor.
Some routing protocols achieve fault tolerance by providing multiple path [24–29]. Multipath can improve communication reliability, realize load-balancing, and relieve congestion. Ad hoc on-demand multipath distance vector (AOMDV) [26] is the multipath extension of a single path routing protocol known as ad hoc on-demand distance vector (AODV). AODMV maintains disjoint multipath which fails independently. The disjoint paths include link-disjoint path and node-disjoint path. Link-disjoint is effective in keeping links available while node-disjoint is appropriate for relieving congestion.
Most of these works focus on identifying reliable path and constructing multiple path. IWSNs should adapt to harsh environment and meet stringent requirements. ISA100.11a [15] and WirelessHART [14] as main industrial standardization groups present graph routing which also supports multipath.
2.2. Source Routing and Graph Routing
These industrial standards define two primary routing approaches: source routing and graph routing. Source routing is a general routing supported by simple protocol and a single direct route from a source to a destination. The next hop of a packet will be directed to a specific neighbor. The ordered list of routing is included in the network layer header. Source routing only establishes a single path between the source and the destination.
In graph routing, the packet is disseminated to its destination according to routing graph. The routing graph is a set of directed links and identified by unique graph ID. All nodes will be preconfigured with relevant graph information about which neighbor the packets can be forwarded. The network layer header of packets just need to include the graph ID. In a graph, the neighbors which can be forwarded are not single. So graph routing makes it possible to provide redundant communication path. The source routing and graph routing information defined in separate network header fields could coexist in industrial standards.
Reference [19] presents efficient algorithms to construct three types of reliable routing graphs for different communication purposes. This paper ensures reliability by redundant parent nodes. To construct reliable graph, this paper choose two different parent nodes so that there are two communication paths at least. The experiment results show that the algorithms can achieve highly reliable routing at the cost of modest configuration overhead compared with other baseline methods.
3. Industrial Wireless Sensor Networks Architecture
The architecture of IWSNs mainly consists of centralized manager, backbone routers (BBRs), and field devices (see Figure 1). The centralized manager not only takes charge of the management of the entire network but also represents infrastructure device to communicate with external networks. In IWSNs, each field device, sensor or actuator, has a designed sample rate to publish its data to manager and receive control commands. These field devices attached to the plant devices collect data, in this paper, and also route message [16].

The architecture of IWSNs.
The BBRs unite multiple wireless subnets and make industrial wireless systems interoperate with control networks. Multiple BBRs make the system robust with redundancy and optimize the communication path. Multiple BBRs provide multiple access points in IWSNs in order to facilitate node arrangement [30]. So the ISA100.11a architecture employs multiple BBRs and they are all connected by wire [15].
Both ISA100.11a and WirelessHART adopt IEEE 802.15.4-2006 [31] as the bottom of their communication stack. These standards define TDMA, channel hopping, and industry-standard AES-128 ciphers, and keys. In network layer, the backbone network conforms to Internet Protocol (IP), IPv4 and newer IPv6. In IWSNs, these standards present two primary routing approaches: graph routing and source routing. The centralized manager is responsible for maintaining up-to-date routing and guaranteeing the communication reliability.
4. Centralized Reliable Graph Routing
In this section, we present the content concerning how to achieve the centralized reliable graph routing. The mechanism of graph routing is described in detail by industrial standards. We proposed the algorithms to construct reliable routing graph. We describe three reliable routing graphs for different communication purposes. For three communication types, the reliable routing graph should meet different requirements.
4.1. Communication Types
There are three communication types for industrial process monitoring and control (see Figure 2). The BBRs link up the field network and the control system. The types of communication are broadcast, uplink, and downlink.
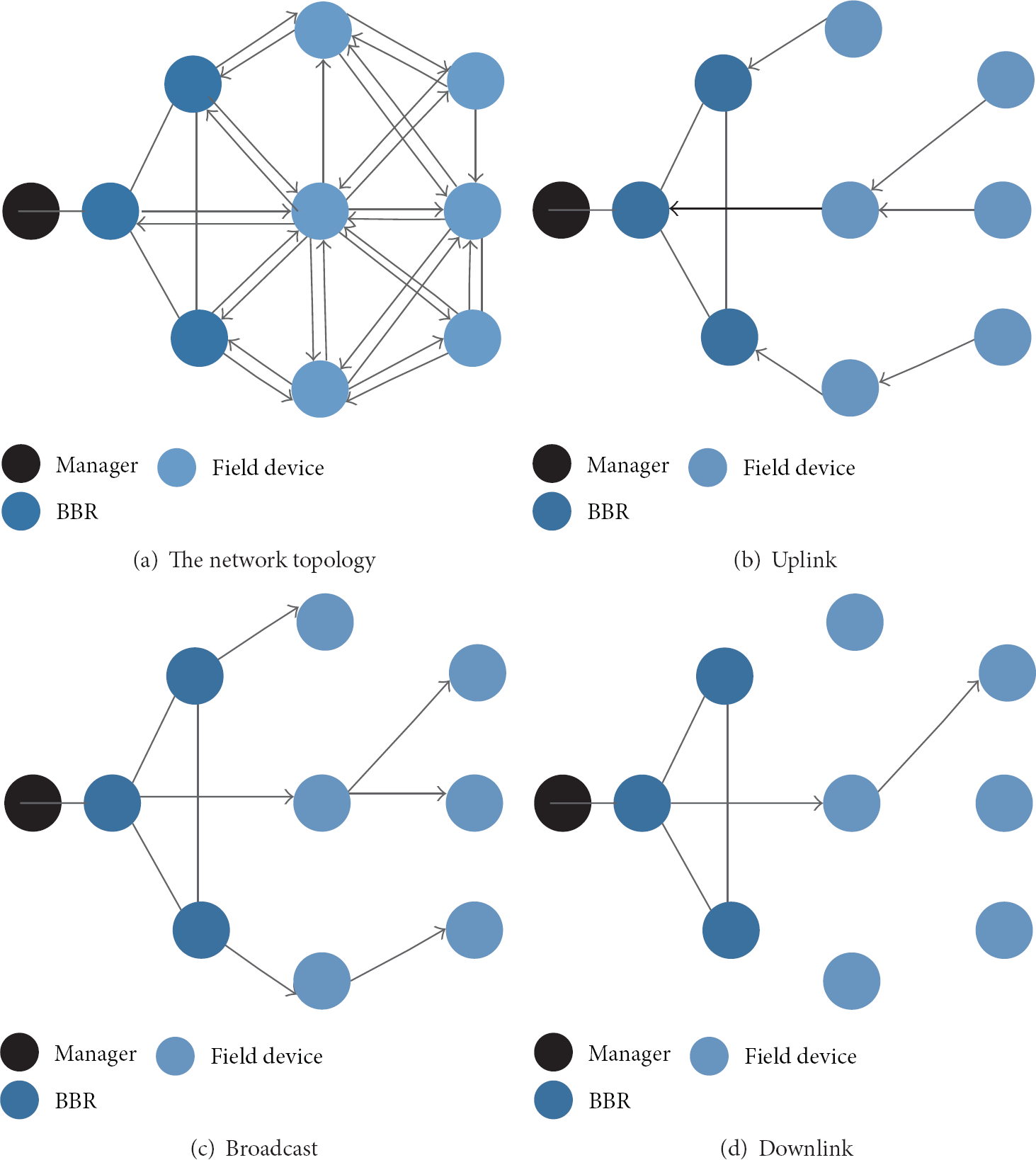
The Types of Communication.
4.1.1. Broadcast
Broadcast refers to the direction from the BBRs towards entire network. The centralized manager propagates the common configuration and control data to field devices periodically.
4.1.2. Uplink
Uplink refers to the direction from field devices towards the BBRs, in the reverse direction of broadcast. Every field device has a specific sample rate to propagate its process data to the manager.
4.1.3. Downlink
Downlink refers to the direction from the BBRs towards any field device. The centralized manager propagates a specific control message to an individual device by the BBRs.
The routing graphs have different characteristics for different communication types. The entire network can share the same broadcast graph and uplink graph. However, the centralized manager should generate the corresponding downlink graph for each field device. The reliability requirements are also different when applied to different communication types.
4.2. Notations
This section presents the notations used in this paper. In wireless network
In this paper, we define

We choose reliability rather than hop count as criteria to choose parent node to improve reliability and reduce energy consumption. Equation (1) shows that the path with fewer hops has higher reliability in general, but more hops may be better when additional forwarding nodes are inserted according to certain principles to shorten the length of individual hops [32, 33]. In our approach, we define a reliability parameter
4.3. Link Correlation
A feature of wireless communication is that link errors are dependent between neighbor nodes. Recent works [34–36] have shown that correlated interference might lead to correlated packet errors because the interference signal can corrupt neighbor links simultaneously. Link correlation has significant effects on reliability attributes for our route selection.
To illustrate the link correlation, we give an example to demonstrate the reliability attributes with correlation, as Figure 3. Link independence means that

The link correlation.
4.4. Fault Tolerant and Reliability Attributes
The errors that occur on the communication links can be classified into two categories: transient errors and permanent errors. For permanent errors, the routing should be recovered by the centralized manager. But recovering from transient errors, hop-to-hop (data link layer) and end-to-end (transport layer) retransmission can be performed. The link layer retransmission cannot work sometimes in case of signal interference. And end-to-end retransmission has significant latency that would be unacceptable to some real-time industrial applications. The fault tolerant of our routing can be categorized into replication and retransmission mechanism for different communication types [37].
In

In IWSNs, the centralized manager will determine the importance of the industrial massage for the desired reliability
In this paper, there are redundant BBRs as access points for reliability and load balancing. They are connected by wire and the reliability attributes,

4.5. Process to Construct Graph
In our approaches, we divide nodes into two categories: in the graph and out of the graph. The nodes out of the graph are incrementally selected to construct graph. The new node has neighbor nodes which can communicate with each other and only neighbor nodes in the graph can be selected as parent nodes; then Figure 4 illustrates an example. The communication area may not be a circle because each node may have a different communication range. We choose eligible nodes as parent nodes, and then the node becomes one of the sets in the graph. When all nodes in the network are in the graph, the process of constructing graph is over.

Process of constructing graph.
4.6. Reliable Broadcast Graph
Reliable broadcast graph needs
The number of selected parent nodes depends on the reliability attribute and the link correlation. We maintain
For each node from the reliable node set

(1) Initially among (2) (3) (4) Find S, and Pt is the parent set of (5) (6) The network topology is disconnected (7) (8) (9) (10) (11) Sort the reliability (12) (13) (14) (15) Choose the node node, (16) (17) (18) (19) (20) (21) (22) (23) (24) (25) (26) (27) Choose the node (28) Add (29) (30) Choose the node (31) Add (32) (33) (34)
4.7. Reliable Uplink Graph
The algorithm to construct reliable uplink graph
Initially among (2) Construct (4) Find S, and Pt is the parent set of (6) The network topology is disconnected (8) (10) (12) Sort the reliability Choose the node node, (14) (16) (18) (20) (22) (24) Choose the node (26) Add (28) Choose the node Add (30) (32)
4.8. Reliable Downlink Graph
The downlink graph
We maintain D, a set of nodes which have their reliable downlink graphs. Initially, D only contains
Initially (3) Find S, and Pt is the parent set of The network topology is disconnected (6) (9) Choose (12) Choose the node Add ( Choose the node Add (18)
4.9. The Percentage of Reliable Nodes and the Link Quality
In harsh and noisy industrial environment, the link quality is the major barrier to maintain reliable nodes. The bad link quality will make the network unreliable. We evaluate the relationship between the percentage of reliable nodes and the link quality.
We conducted some experiments to evaluate the percentage of reliable nodes by changing the link success probability. In Figure 5, we observe that with 50, 100, and 150 nodes in the experiments, when the link success probability is above 0.7, most nodes are reliable nodes by multiparent nodes. The percentage of reliable nodes drops quickly along with the decreasing link quality below 0.7. Figure 5(a) shows that there are few reliable nodes in the network when the link success probability drops to 0.4 but the value is nearly 0.6 in Figure 5(b) because the fault tolerant mechanism of

Percentage of reliable nodes and link quality.
4.10. Loop Avoidance
In IWSNs, the node mobility and failure would incur topology change and routing failure. The graph routing with our algorithm would generate routing failure, take time to converge, and introduce much overhead. However, our approaches will not cause the loop problem. The nodes in the network are added to the graph in order. We can sort these nodes based on the time when they join the graph. In
5. Performance Evaluation
This section shows some simulation results illustrating features of reliable graph routing. The reliable performance of graph routing is largely independent of MAC layer protocols. The simulation topology consists of 100 nodes. The link success probability of all links is the mean percentage of successful links assuming link independence. The link success probability is varied from 0.0 to 0.9. In our simulations, there are three BBRs interconnecting with the centralized manager and the topology is shown in Figure 6.

The topology of simulation.
5.1. Simulation Parameters
Our simulation for graph routing performance is based on 100 nodes. We evaluate the impact for graph routing performance when the size of the network varies. Figure 7 shows the number of links along with the size of the network. In Figure 7(a), the number of links decreases when the link success probability is 0.5, while it is 0.65 in Figure 7(b). The curves for three kinds of the network have similar trends.

Number of links with node number.
The other important parameter is

Performance of Broadcast Graph with Different

Performance of Uplink Graph with Different
5.2. Performance of Graph Routing
In the experiment, we conducted a series of experiments to evaluate the performance of routing reliability, number of links, and expected number of transmissions in different routing graphs. Then the link success probability in the network is gradually increasing from 0% to 90%. The fault tolerant mechanism of

Performance of broadcast graph.
We compare our approaches for the reliable graphs with three other approaches. The first approach constructs a single tree using breadth-first search, the second approach chooses two parents to construct graphs [19], and the third approach contains all parents in graphs for max reliable. When a node is added to the graph in these approaches, one, two, or all parent nodes from the current graph are chosen by the average hop between the new node and BBRs. In our approach, reliability attributes are used to support a balance between the reliability and overhead. In our experiment, the number of links is measured by the number of links that the periodic messages used to maintain these links available. More parents need to exchange more information to maintain these links. The expected number of transmissions is defined as the expected number of links for the communication between every nodes and BBRs. In
The first experiment evaluates the performance of reliable broadcast graph. Figure 10 summarizes all results of
In the second experiment, the performance of

Performance of uplink graph.

Performance of downlink graph.
The third experiment shows the performance of reliable downlink graph. As
6. Conclusion
In this paper, we present the mechanism to support reliable graph routing in IWSNs. We summarize three communication types for industrial application and construct reliable graphs for different communication purposes. Our approach constructs the routing graph based on the link reliability and link correlation. When the link success probability is low, our approaches provide reliable communication with compromising network overhead. When the communication links are reliable, we pursue not the optimal reliability but less overhead. Indeed, the performance and overhead also rely on the network topology and the node density. Therefore, we should further improve and detect our approach.
In future work, our system will be deployed in real large-scale manufacturing factory and will face more challenges and problems in industrial environments. We will do the experiment about the packet reception correlation among neighbor nodes. Then we should look for more efficient algorithms to construct reliable graph and improve other network performances. As a future extension of this work we will focus on the data link layer communication schedule based on routing graphs for multihop transmission. We want to have a cross-layer approach where the network and MAC layer will work together to achieve end-to-end reliable and real-time communication.
Footnotes
Acknowledgments
This work was supported by the National Natural Science Foundation of China (Grant nos. 61201204 and 61271201), the Fundamental Research Funds for the Central Universities (Grant no. 2013YJS014), and the National Major Projects of China (Grant no. 2012ZX03005003).