
Abstract
Most studies on path synthesis problems are to trace simple or smooth trajectories. In this work, an optimum synthesis for several special trajectories generated by a geared five-bar mechanism is studied using the one-phase synthesis method. The synthesis problem for the special trajectories, which is originally studied using the two-phase synthesis method discussed in the literature, is a real challenge due to very few dimensionally proportioned mechanisms that can generate the special trajectories. The challenging special trajectories with up to 41 discrete points include a self-overlapping curve, nonsmooth curves with straight segments and vertices, and sophisticated shapes. The error function of the square deviation of positions is used as the objective function and the GA-DE evolutionary algorithm is used to solve the optimization problems. Findings show that the proposed method can obtain approximately matched trajectories at the cost of a tremendous number of evaluations of the objective function. Therefore, the challenging problems may serve as the benchmark problems to test the effectiveness and efficiency of synthesis methods and/or optimization algorithms. All the synthesized solutions have been validated using the animation of the SolidWorks assembly so that the obtained mechanisms are sound and usable.
1. Introduction
The problem of path synthesis is to generate a definite mechanism whose coupler point can trace a desired trajectory or target points. The continuous trajectory may be represented by a sequence of discrete points. The path synthesis of four-bar mechanisms has been extensively studied. A geared five-bar mechanism, as shown in Figure 1, can provide more complex motions than a four-bar mechanism, since the former exceeds the latter in the number of design variables by five. In addition to the gearset (with and without idlers), the timing belt and pulleys can also be employed to derive the motions of links 2 and 5. Note that the kinematic effects of the geared five-bar mechanism (DOF is one) and the five-bar mechanism (DOF is two) are the same, if the gear ratio for the former and the ratio of angular velocity of the input link 5 to the input link 2 for the latter are the same and if the initial angular positions of links 2 and 5 for the former and the latter are the same. The only difference is that the latter needs two driver and the former needs one driver and a gearset. Roth and Freudenstein [1] proposed a numerical method for a path synthesis task with nine target points of a geared five-bar mechanism. Zhang et al. [2] produced an atlas containing 732 coupler curves for the symmetric geared five-bar mechanism and then used a nonlinear programming method in conjunction with the atlas as the initial guess for the optimal path synthesis of the mechanism. Starns and Flugrad [3] and Subbian and Flugrad [4] applied the continuation method to a path synthesis task with seven precision points of a geared five-bar mechanism. Nokleby and Podhorodeski [5] used a quasi-Newton optimization routine for the optimum path synthesis of a geared five-bar mechanism. These synthesis methods belong to the one-phase synthesis method, which attempts to simultaneously satisfy the shape, size, location, and orientation information of the desired trajectories. Recently, a two-phase synthesis method has been proposed in [6, 7] for path synthesis problems of four-bar mechanisms, where the first-phase synthesis is shape synthesis and the second-phase synthesis is scale, translation, and rotation synthesis [6]. Buśkiewicz [8] proposed a two-phase synthesis method using the function of the distance of the curve from its centroid (DCC) to describe the curve shape in terms of its normalized Fourier coefficients for the shape synthesis of a geared five-bar mechanism. A construction of a curve description (F-function) without referring to the harmonic analysis was also presented. The affinity of shapes is used as the objective function and an evolutionary algorithm is applied to solve the shape synthesis (shape optimization) problem. Five special trajectories with up to 40 discrete points for the geared five-bar mechanism are studied in [8] using the DCC, F-function, and curvature-based methods [7]. The special closed trajectories include a self-overlapping curve (ArcofEllipse), nonsmooth curves with straight segments and vertices (Triangle and Asteroid), and sophisticated shapes (GLetter and ParamCurve). The theme on such special trajectories is the first time to be studied in the literature. They claimed that the curves ParamCurve and GLetter are best synthesized by the DCC method, while the others by the curvature-based method; moreover, the DCC method approximates quite well the curve Gletter and Asteroid, for which the curvature-based method fails to achieve satisfactory results. The conclusion is that the DCC method gives satisfactory approximations. In [8], only the shape synthesis results are obtained. Furthermore, the degree of shape similarity redrawn according to their obtained synthesis parameters for several curves should be unsuccessful. Therefore, the synthesis problem for the special trajectories is a real challenge due to very few dimensionally proportioned mechanisms that can generate the special trajectories.

Geared five-bar mechanism in the global coordinate system.
Regarding the synthesis methods discussed in the literature, they may be divided into two categories. The first category is the direct synthesis method without utilizing atlas database [1, 3–29]; the second category may be regarded as the indirect synthesis method using (computerized) atlas database [2, 30–34]. The direct synthesis method may be further divided into two subcategories. The first subcategory is one-phase synthesis [1, 3–5, 9–11, 14–29] and the second subcategory is two-phase synthesis [6–8, 12, 13] for the direct synthesis method. The two-phase synthesis method first handles the shape synthesis and then handles the scale-rotation-translation synthesis. Note that the two-phase synthesis method discussed in the literature cannot handle path synthesis problems with prescribed timing. Several optimization algorithms, including exact gradient [9], simulated annealing [13], genetic algorithm (GA) and modified GA [7, 8, 10, 11, 19, 23, 25], ant-gradient [6, 17, 26], genetic algorithm-fuzzy logic [24], differential evolution (DE) and modified DE [14–16, 18, 19, 21, 22, 27], particle swarm optimization [19], GA-DE [20, 28], and hybrid optimizer [29], are used to solve the optimization problems of path synthesis. In the one-phase synthesis method, the error function in [9–11, 14–22] is based on the sum of the square of Euclidean distance error (termed the square deviation in this study) between the target points and the corresponding coupler points. The error function in [23, 24] is based on the orientation structural error of the fixed link. References [25, 26] use other error functions as the objective function. Recently, Matekar and Gogate [27] proposed a modified distance error function for path synthesis problems with prescribed timing and obtained the lower transverse errors at the cost of the higher longitudinal errors because they thought the former is an indication of closeness between the generated and prescribed paths and the latter is an indication of the error in the timing. Sedano et al. [29] proposed a new error estimator defined by means of the precision points. Their error estimator enables the evaluation of the fitness of the function without influence of translation, rotation, and scaling effect.
In this work, the challenging path synthesis problems for the special trajectories generating by the geared five-bar mechanism is studied using the one-phase synthesis method, where the error function of the square deviation of positions is used as the objective function and the GA-DE evolutionary algorithm [20, 28] is used to solve the optimization problem.
2. Kinematic Synthesis Formulation
Figure 1 depicts a stick diagram and all the geometric parameters of a geared five-bar mechanism with circular gears. Angle θ2 is the input angle in this work. In the previous studies, only Nokleby and Podhorodeski [5] considered the initial angular positions θ20 and θ50 of links 2 and 5, respectively, as design variables. The relation between angular positions θ2 and θ5 of links 2 and 5, respectively, can be expressed as

where λ is the gear ratio. Because link 2 always can arrive at the orientation of +
2.1. Design Variables
There are at least 14 design variables for path generation with prescribed timing, r1, r2, r3, r4, r5, r
cx
, r
cy
, θ20, θ50, x0, y0, θ0 and the number of revolutions of gears 2 and 5, denoted by n2 and n5, respectively, to be optimized. The value of n2 and n5 should be specified in advance [5], because the variation of the value of n2, involved with the range of the rotation of link 2, may influence search quality (solution quality). In addition to 12 design variables, there are input angles θ2
i
(i = 1 – N) corresponding to discrete points or target points that need to be optimized for path generation without prescribed timing. Design variable vector

where N is the number of target points or discrete points to be optimized.
2.2. Position Equations
The vector loop in the coordinate system O2 X r Y r is shown in Figure 1, and the corresponding vector loop equation in terms of the complex polar notation is expressed by

Equation (3) can be transformed into two scalar equations as follows:

Angles θ3 and θ4 can be solved from (4). The derivation of the expressions of θ3 and θ4 in terms of θ2 and θ5 is straightforward but tedious [35]. Angle θ3 is expressed as follows:

where
Only one configuration solution represented by the plus sign on the radical is considered in this study.
Coupler point C in the coordinate system O2X r Y r is shown in Figure 1, and the position of the coupler point in terms of the polar form is expressed by r2ejθ2 + r cx ejθ3 + r cy ej(θ3 + π/2). Thus, the coordinates of coupler point C in the coordinate system O2 X r Y r are expressed by

The coordinates of the coupler point in the world coordinate system OXY can be expressed by

2.3. Design Objective and Constraints
In this work, the goal for the geared five-bar mechanism optimum synthesis problem is to minimize the error function of the square deviation of positions considered as the first part of the objective function, which may be expressed by

where (C Xd i , C Yd i ) and (C X i , C Y i ) denote the coordinates of the ith desired point and the corresponding coupler point, respectively.
The full-rotatability condition for the geared five-bar mechanism may be expressed by

where r max is the lengths of the longest link; rmin1 and rmin2 are the lengths of the two shortest links; and r m and r n are the lengths of the other two links.
The full-rotatability condition is inserted into the objective function as a penalty function as follows.
Minimize

where h1(
The mean distance error between the target and coupler points is defined as

3. GA-DE Evolutionary Algorithm
The GA-DE hybrid evolutionary algorithm can be found in [20, 28]. For completeness, it is briefly described in this section. A population with randomly generated chromosomes is initialized. Each chromosome (individual) is a candidate solution. The quality of the individual is estimated by the fitness value. Roulette-wheel selection is employed to allow those individuals with higher fitness to have a higher chance of being selected. Thereafter, two individuals are paired randomly to be parents. Offspring are generated using genetic operators, differential vector perturbation and mutation, from either one or two individuals. The technique of elitism [36] is employed in this work as follows: the best-so-far individual is always retained, replacing the current worst one, carrying on into the succeeding generation.
Here, genes x
i
(i = 1 – n) represent n variables encoded in terms of real numbers that fall between their bounds. All genes are grouped in a vector


3.1. Initialization
An initial population with N p chromosomes is randomly generated. The gene in each chromosome is given by

where γ is a random real number between 0 and 1.
3.2. Differential Vector Perturbations
The differential vector perturbation of DE, with the best individual or some excellent individuals as the disturbed vectors, is employed to replace the crossover operation in RGA. Therefore, parents are used as differential vectors, not as crossover. All parents are randomly divided into k groups corresponding to the top k individuals, denoted by

where
A main perturbation rate Pm1 is defined as the ratio of the expected number of offspring generated by differential vector perturbations to the total population size, while replacing crossover rate P c in RGA.
3.3. Mutation
Here, mutation is performed to replace an entire, randomly selected chromosome with random real numbers (that are within the limits of variables). The minor perturbation rate Pm2, that is, mutation rate, is defined as the ratio of the expected number of offspring introduced by mutation to the total population size.
3.4. Schemes
In order to obtain satisfactory evolution, several schemes are used [20]. First, the schemes of reassigning link lengths in a random way to satisfy the full-rotatability condition and rearranging input angles to satisfy CCW rotation for an initial population are used. Secondly, the constraint regarding design variables within the specified ranges may be achieved by assigning the values of design variables within their prescribed ranges during initialization and mutation operations. Furthermore, if the value obtained by the operation of differential vector perturbations is not within the prescribed range, one may repeat this operation (changing only random real numbers of γ1 and γ2 in (16)) until the value falls within the prescribed range. Lastly, the input angles are assigned values within the prescribed range only during initialization and mutation operations. It is allowable for the value of the input angle to exceed its limit during the course of evolution. Because of rearranging the input angles to satisfy CCW rotation during initialization and mutation operations, the constraint regarding the sequence of input angles satisfying the rotation order may be ignored until the end of the evolution, so long as the order of rotation of the input angles is satisfied in the final evolution. By the schemes and the mechanism of evolution, sound chromosomes may be obtained. The GA-DE algorithm generally has very good search ability. However, the GA-DE algorithm sometimes suffers the premature convergence especially for a difficult problem. In the GA-DE algorithm, a large population size and more excellent individuals as the disturbed vectors can be utilized to alleviate the premature convergence problem, together with more repeated runs [27, 28] to find satisfactory results.
4. Results
Five path synthesis problems for the special trajectories, including Triangle, Asteroid, ParamCurve, ArcofEllipse, and GLetter curves, are studied. For all problems discussed here, let n2 = 1, 2, 3 and n5 = ± 1. Thus, there are six cases that need to be performed to find the best values of n2 and n5 for one problem. The limits of the design variables are r1, r2, r3, r4, r5 ∈ [1,20]; r cx , r cy , x0, y0 ∈ [−20,20]; θ20, θ50, θ0 ∈ [0,2π]. The user-supplied parameters for the GA-DE evolutionary algorithm are described below. A population size of 800 is used for problem 1 with 22 discrete points and a population size of 1600 is used for other problems (GLetter curve with 40 target points and the other curves with 41 discrete points) for more accurate solutions. The top four individuals for Asteroid and ArcofEllipse curves and the top two individuals for other problems are used as the disturbed vectors. The number of generations is G max = 1000 for all problems. The major perturbation rate is Pm1 = 0.6 and the minor perturbation rate is Pm2 = 0.01. Fifty repeated runs in all problems are executed to find satisfactory results.
Since the kinematic effects of the geared five-bar mechanism and the five-bar mechanism can be the same, all the synthesis solutions in this work have been validated using the SolidWorks animators for the equivalent five-bar mechanisms so that the obtained mechanisms are sound and usable, which are shown in Appendices A–E (see Supplementary Material available online at http://dx.doi.org/10.1155/2013/757935) and [37].
4.1. Problem 1: Triangle Curve with 22 Discrete Points
The discrete points for the Triangle curve are shown in Table 1. The synthesis design variables, the number (N o ) of evaluations of the objective function, the value of objective function, and the mean distance error are shown in Table 2, together with the synthesis solutions obtained by Buśkiewicz [8]. The input angles of the obtained optimum mechanism are shown in Table 3. Figure 2 shows the desired trajectory and the coupler curve obtained using the proposed method, together with the coupler curves obtained by Buśkiewicz [8]. The present coupler curve approximates fairly well the desired trajectory. The agreement in shape similarity between the desired trajectory and the coupler curves obtained using Buśkiewicz's curvature-based and DCC methods [8] should be good. The SolidWorks animator for the equivalent optimum five-bar mechanism is shown in Appendix A.
Discrete points for problem 1.

Synthesis results for problem 1.

Input angles of the optimum mechanism for problem 1.


Desired trajectory (Triangle) and the coupler curve obtained using the proposed method, together with the coupler curves obtained by Buśkiewicz [8].
4.2. Problem 2: Asteroid Curve with 41 Discrete Points
The Asteroid curve is defined by the parametric equation x(t) = 5 cos3(2πt), y(t) = 5 sin3(2πt), t ∈ [0,1]. There are 41 discrete points for the curve, where the value of t for ith point is (41 – i)/40. The synthesis design variables, the number of evaluations of the objective function, the value of objective function, and the mean distance error are shown in Table 4, together with the synthesis solutions obtained by Buśkiewicz [8]. The input angles of the obtained optimum mechanism are shown in Table 5. Figure 3 shows the desired trajectory and the coupler curve obtained using the proposed method, together with the coupler curves obtained by Buśkiewicz [8]. It can be seen that the present coupler curve approximates fairly well the desired trajectory. The SolidWorks animator for the equivalent optimum five-bar mechanism is shown in Appendix B.
Synthesis results for problem 2.

Input angles of the optimum mechanism for problem 2.

Desired trajectory (Asteroid) and the coupler curve obtained using the proposed method, together with the coupler curves obtained by Buśkiewicz [8].
4.3. Problem 3: ParamCurve Curve with 41 Discrete Points
The ParamCurve curve is defined by the parametric equation x(t) = 5 (cos (4πt) + sin (πt)), y(t) = 3 sin (4πt), t ∈ [0,1]. There are 41 discrete points for the curve, where the value of t for ith point is (i – 1)/40. The synthesis design variables, the number of evaluations of the objective function, the value of objective function, and the mean distance error are shown in Table 6, together with the synthesis solutions obtained by Buśkiewicz [8]. The input angles of the obtained optimum mechanism are shown in Table 7. Figure 4 shows the desired trajectory and the coupler curve obtained using the proposed method, together with the coupler curves obtained by Buśkiewicz [8]. It can be seen that the present coupler curve approximates fairly well the desired trajectory. The SolidWorks animator for the equivalent optimum five-bar mechanism is shown in Appendix C.
Synthesis results for problem 3.
Input angles of the optimum mechanism for problem 3.

Desired trajectory (ParamCurve) and the coupler curve obtained using the proposed method, together with the coupler curves obtained by Buśkiewicz [8].
4.4. Problem 4: ArcofEllipse Curve with 41 Discrete Points
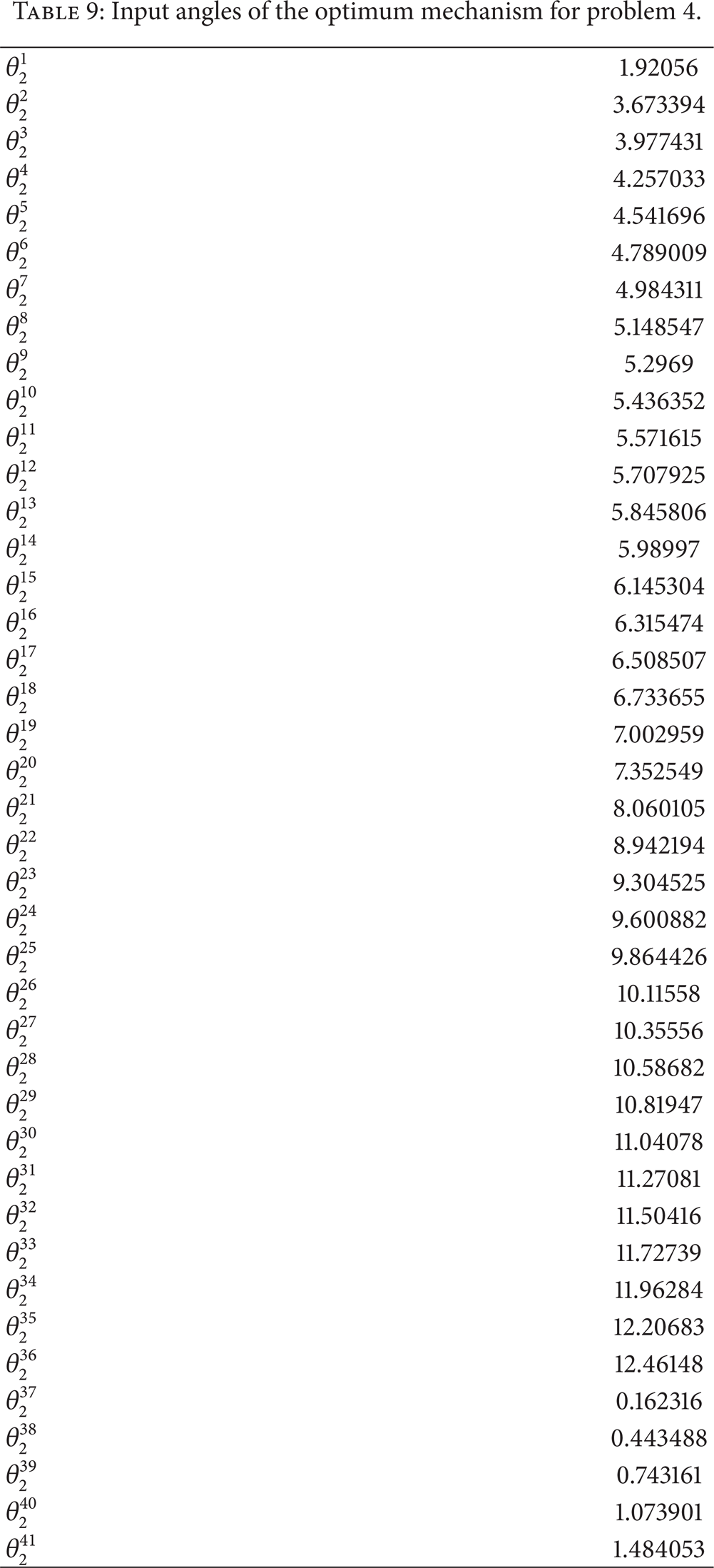
The ArcofEllipse curve is defined by the parametric equation x(t) = 3 cos (π/6 + 2πt), y(t) = 2 sin (π/6 + 2πt), t ∈ [0,0.5]. The arc is traced for t ∈ [0,0.5] and then back to the starting point along the same path. There are 21 and 20 sampling points with the same spacing for the forward and backward paths, respectively. The synthesis design variables, the number of evaluations of the objective function, the value of objective function, and the mean distance error are shown in Table 8, together with the synthesis solutions obtained by Buśkiewicz [8]. The input angles of the obtained optimum mechanism are shown in Table 9. Figure 5 shows the desired trajectory and the coupler curve obtained using the proposed method, together with the coupler curves obtained by Buśkiewicz [8]. It can be seen again that the present coupler curve approximates fairly well the desired trajectory. The SolidWorks animator for the equivalent optimum five-bar mechanism is shown in Appendix D.
Synthesis results for problem 4.

Input angles of the optimum mechanism for problem 4.

Desired trajectory (ArcofEllipse) and the coupler curve obtained using the proposed method, together with the coupler curves obtained by Buśkiewicz [8].
4.5. Problem 5: GLetter Curve with 40 Target Points
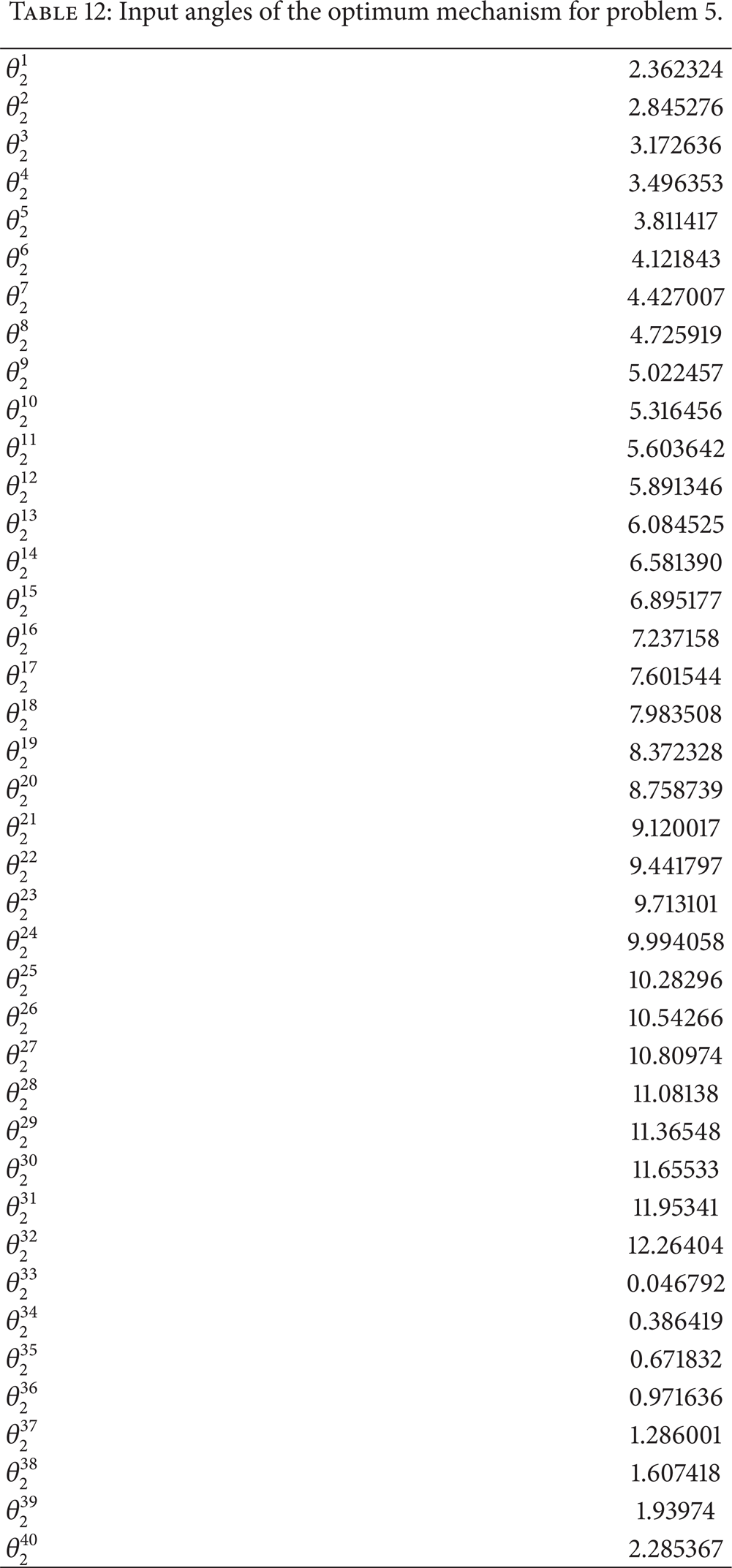
The target points for the GLetter curve are shown in Table 10. The synthesis design variables, the number of evaluations of the objective function, the value of objective function and the mean distance error are given in Table 11, together with the synthesis solutions obtained by Buśkiewicz [8]. The input angles of the obtained optimum mechanism are shown in Table 12. Figure 6 shows the desired trajectory and the coupler curve obtained using the proposed method, together with the coupler curves obtained by Buśkiewicz [8]. It can be seen that the present coupler curve approximates quite well the desired trajectory. The SolidWorks animator for the equivalent optimum five-bar mechanism is shown in Appendix E.
Target points for problem 5.

Synthesis results for problem 5.

Input angles of the optimum mechanism for problem 5.

Desired trajectory (GLetter) and the coupler curve obtained using the proposed method, together with the coupler curves obtained by Buśkiewicz [8].
5. Conclusions
The challenging path synthesis problems for the special trajectories generating by the geared five-bar mechanism is studied using the one-phase synthesis method, where the error function of the square deviation of positions is used as the objective function and the GA-DE evolutionary algorithm is used to solve the optimization problem. The proposed method can obtain approximately matched trajectories at the cost of a tremendous number of evaluations of the objective function. Therefore, the challenging problems may serve as the benchmark problems to test the effectiveness and efficiency of synthesis methods and/or optimization algorithms. Using other synthesis methods (such as the two-phase synthesis method based on the state-of-the-art composite Fourier shape descriptor combining the center distance with the perimeter area function [38] or case-based approach using a neural network [33, 34]), the novel error estimator [29], other potential evolutionary algorithms [39, 40], or some techniques for enhancement of an initial elitist population might be the directions for future works to improve the accuracy or efficiency.
Footnotes
Acknowledgment
This work was supported by the National Science Council of the Republic of China under the Contract NSC 100-2221-E-237-004.