
Abstract
This paper proposes a kind of controller comprising Twisting algorithm and adaptive method for the trajectory tracking control of intelligent vehicle system with uncertainties. Firstly, by the adding the adaptive compensation controller, shortcomings of existing second order sliding mode Twisting algorithm are avoided. Second, based on the previosly improved method, we also add another kind of adaptive controller to make the controller parameters do not need to be selected. The intelligent vehicle system can achieve finite-time trajectory tracking, the upper bounds of the uncertainties do not need to be determined previously, and the controller parameters can be adjusted automatically according to the system state. The effectiveness and robustness of the improved algorithm are verified by theory and simulation results of the intelligent vehicle system.
1. Introduction
Intelligent vehicle is a kind of robots, and it is a typical complex nonlinear system that consists of various machines, sensors, and computer. Because of the usefulness of the intelligent vehicle in many applications, research on it is one of the most active fields in the development of science [1]. The controller design for trajectory tracking is a complicated problem, and it is one of the key technologies for the intelligent vehicle. The trajectory tracking controller for the intelligent vehicle should achieve good robustness, high control precision, and rigid time limitation [2]. In an actual intelligent vehicle system, there exist a lot of uncertain items, such as the system mass always changes because of the idea that changing load; the moment of inertia cannot be measured accurately; the wheel radius will be reduced because of the friction between the wheel and the ground. And there are always some other items such as dynamic friction and static friction. For the intelligent vehicle system, how to obtain trajectory tracking under the uncertainties in finite-time is one of the most challenging problems.
The control methodology adopted in this paper is second order sliding mode (SOSM). The traditional sliding mode control (SMC) method has been developed widely due to its robustness and simplicity. However, it has the constriction that the relative degree of the system to be controlled is one. Another big disadvantage of the traditional SMC is the appearance of chatting. Therefore, The SOSM control is developed by Levant in 1987. It works on a second order derivative surface to reduce the effect of chattering on the system output while maintaining the robustness of an SMC system and removes the constriction of relative degree [3]. There are some kinds of SOSM algorithms such as Twisting algorithm, Super-Twisting algorithm, and Suboptimal algorithm. Here we use the Twisting algorithm which is one of the simplest and most popular algorithms. The SOSM control problem can be transformed to finite-time convergence problem for nonlinear systems. It means that the system can reach equilibrium points in finite-time under the controller. It is highly desirable that the finite-time convergence control maintains good performance under uncertainties.
The existing SOSM algorithms including the Twisting algorithm demand that the bounds of the uncertainties of the system to be controlled should be known first; otherwise, it is difficult to obtain appropriate switching gain [4]. Actually, in practical controller design, the bounds of system uncertainties are difficult to be obtained. Therefore, how to improve the property of SOSM controller to get rid of constrains of bounds of uncertainties and at the same time keep finite-time convergence is the important problem that the SOSM control faces. To solve this problem, adaptive method has been used in many papers. Reference [5] gave the finite-time stability analysis under improved controller; the convergence rate of the SOSM can be hastened through tuning of the controller parameters. The results of finite-time disturbance were analyzed in [6]; the relationship between control system parameters and steady state error convergence region was given. Antidisturbance adaptive sliding mode method was proposed in [7]; the stability of the proposed controller is proved by the Lyapunov theory. Whether the finite-time control system keeps robustness under uncertainties is still worth further research.
The intelligent vehicle studied in this paper is a kind of underactuated systems, which is also known as nonholonomic mobile robot or wheel mobile robot. In general, the stabilization of an underactuated intelligent vehicle system is quiet difficult. By the theory of Brockett, an underactuated system cannot be stabilized by any smooth or continuous time-invariant state feedback. In order to overcome this difficulty, researchers have proposed many kinds of controllers, such as backstepping controllers [8, 9], optimal controllers [10], and sliding mode controllers [11]. There also has been some work on the finite-time trajectory tracking control of intelligent vehicle. References [12, 13] proposed controllers that can solve the finite-time stabilization problem of the intelligent vehicle (wheeled mobile robot) but did not consider the uncertainties that are not practical in the actual system. On the other hand, as uncertainties exist in the real intelligent vehicle system, adaptive and SMC theories are employed in [14, 15] to solve these problems, and adaptive method was given to adjust uncertainties and obtained asymptotically tracking, but not finite-time trajectory tracking. Finite-time tracking control problem of an underactuated intelligent vehicle in dynamic model with external disturbances was investigated in [16]; a kind of finite-time disturbance observer was introduced to estimate the external disturbances. A continuous finite-time control scheme for rigid robotic manipulators was proposed by an improved terminal sliding mode [17].
The motivation of this study is based on the following remarks.
How to obtain finite-time convergence when the uncertainties exist in the system.
The parameters of the controller can be adjusted automatically to the system states and at the same time obtain finite-time convergence.
The proposed methods can be applied to the trajectory tracking control of the intelligent vehicle system successfully.
The rest of the paper is organized as follows. The model of the intelligent vehicle is given in Section 2; the finite-time convergence theory and the conception of SOSM Twisting algorithm are also introduced. In Section 3, adaptive robust compensation controller for the Twisting algorithm is designed and the finite-time convergence theoretical proof was given without the upper bounds of uncertainties estimation. In Section 4, based on Section 3, the controller is further improved; adaptive controller is designed for the estimation of the controller parameters, and at the same time finite-time convergence under uncertainties is obtained, which are also proved by theory and simulation results. Section 5 gives simulation results of the trajectory tracking for intelligent vehicle to verify the robustness and effectiveness of the improved algorithm. Conclusions are presented in Section 6.
2. System Model and Basic Conception
2.1. Intelligent Vehicle
The intelligent vehicle is shown in Figure 1, which consists of one front driven wheel and two independent rear wheels driven by two DC motors [17].

The intelligent vehicle.
The system functions are as follows.
First they are the dynamic equations:

where m and I0 are the mass and the moment of inertia of the intelligent vehicle, respectively, x and y are the Cartesian coordinates of the center of mass of the intelligent vehicle, θ is the angle between the heading direction and the x-axis, and T1 and T2 are torques of the system. λ is the Lagrange multiplier. R and D are the radius and distance of the two wheels, as shown in Figure 1.
The kinematic equations are

v1 and v2 are the velocity and the angular velocity of the intelligent vehicle, respectively; they are always treated as auxiliary control variables.
The dynamic equation can be written as

where
Obviously, the varying parameters do not exist in kinematic equation (2); these are all included in dynamic equation (3).
2.2. Twisting Algorithm
The SOSM Twisting algorithm is given as follows [18].
Consider a class of uncertain system given by
where x(t) are the scalar state variables, φ(t, x) and γ(t, x) are smooth uncertainty items, u(t) is the control input, and s(t, x) is the defined sliding surface. In the present SOSM Twisting algorithm, it is supposed that

where C, K m , and K M are positive constants.
The Twisting algorithm is as follows.

The sufficient conditions for finite-time convergence are

This algorithm can make sure the system obtains finite-time convergence under uncertainties with known upper bounds. To satisfy the sufficient conditions of the sliding surface, gains of controller are always too large, and violent chatting will be induced. In actual system, the upper bounds of uncertainties are hard to be obtained. Here we add adaptive robust compensation controller design method, which automatically adjusts the gains according to system states, and the bounds of uncertainties are not necessary to be known.
2.3. Finite-Time Convergence Theorem
Consider the following system [19]:

Suppose that there is a continuous function V(x): U → R thus the following conditions, hold:
V(x) is positive definite;
there exist real numbers d > 0 and η ∈ (0,1) and an open neighborhood U0 ⊂ U of the origin such that

Then, the origin is a finite-time stable equilibrium of the system (8); if U = U0 = R n , then the origin is a globally finite-time stable equilibrium of system (8).
3. Compensation Controller Design and Analysis
Consider a class of systems

where x is the system state, u is the control input, δ is the unmolded uncertainty, and σ is an exogenous disturbance. Their bounds are unknown. s is the sliding surface.
Define

where E is term of the system uncertainty δu + σ. Suppose that it has an unknown positive upper bound
The controller design is divided into two parts. The first one is an ideal controller uideal, which is continuous and yields finite-time convergence when there are no uncertainties. The second part is a robust controller ucom, which compensates system uncertainties and guarantees the achievement of the control objective. As a result, the overall controller is

The ideal controller for the nominal system is the Twisting algorithm:

The adaptive robust compensation controller is as follows:

where

The estimation error is
First, we choose a Lyapunov function:

Calculating its derivative with time and substituting

So, the system is asymptotically stable.
Now, we choose another Lyapunov function in a small region near the origin before the system reaches zero. Consider

The derivative is

because the system is asymptotically stable. So,
So, there exists a constant

Therefore,
Note that the equality holds when the system reaches the origin.
According to the finite-time Lyapunov convergence theorem, the system achieves finite-time stability under uncertainties.
In the simulation, take uncertainties liking δ = 0.1,

Simulation result with compensation controller.
From Figure 2 we can see that, when uncertainties exit, system state can converge to the equilibrium point by adding compensation controller.
Figure 3 is the simulation result without compensation controller, and the controller parameters are the same with Figure 2. We can see that, when uncertainties exit, system cannot converge in the time with Figure 2.

Simulation result without compensation controller.
4. Adaptive Parameters Choice and Analysis
From the analysis above we can see that the improved algorithm can obtain finite-time convergence, and the controller parameters are more than zero. But the parameters of the controller should be selected by researchers. Now we propose another controller based on the controller in Section 3 to avoid choosing the controller parameters.
Take the controller as

where the adaptive control laws are

Choose the Lyapunov function:

Calculating its derivative with time and substituting the adaptive laws in to it, we obtain
So, when
Now, we choose another Lyapunov function in a small region near the origin before the system reaches zero. Consider

The derivative is

because the system is asymptotically stable. So,

Therefore,
Note that the equality holds when the system reaches the origin. According to the finite-time Lyapunov convergence theorem, the system achieves finite-time stability under uncertainties. Not only the system can realize finite-time convergence, but also the control parameters can be obtained automatically.
In the simulation, take uncertainties liking δ = 0.1,
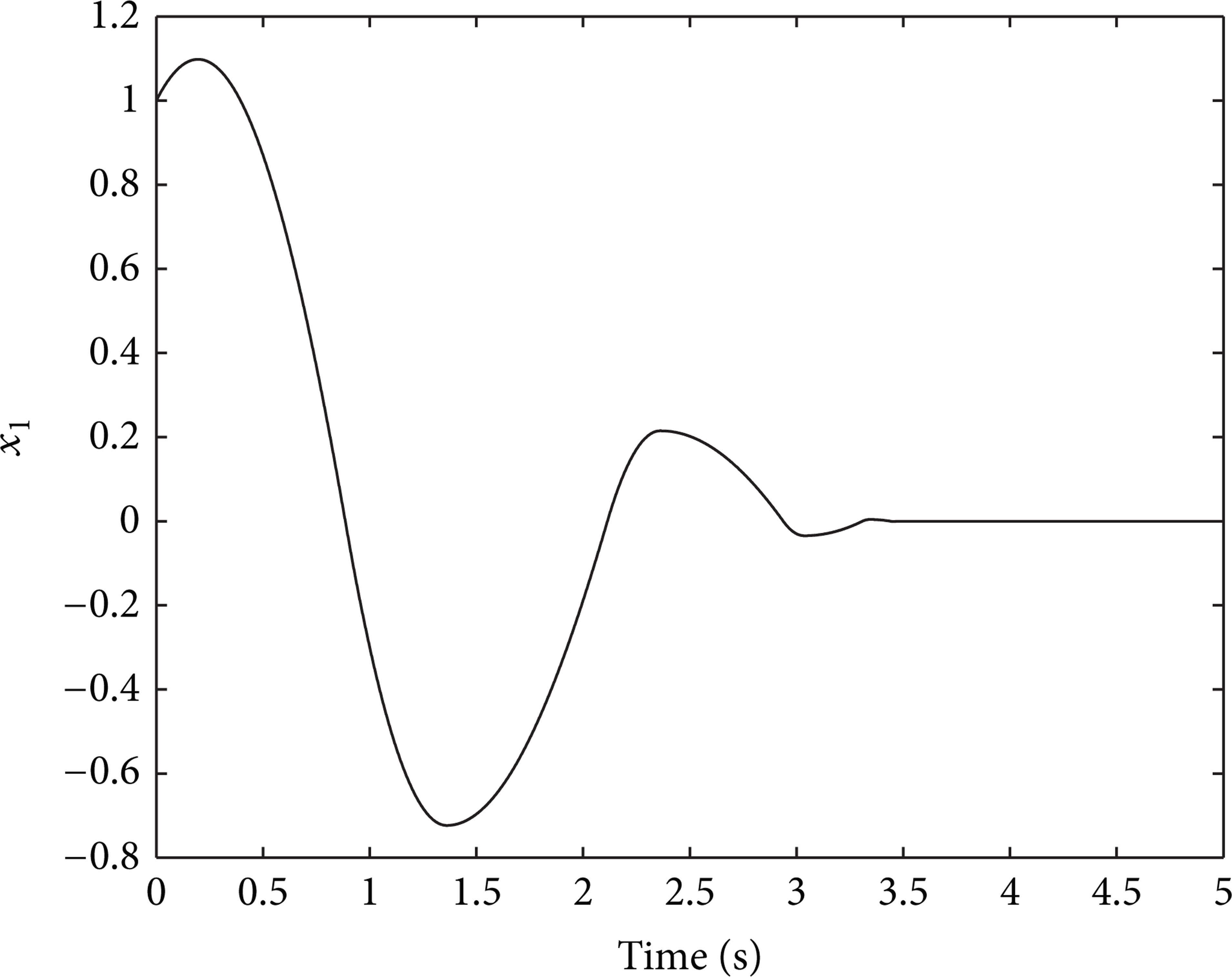
System state with the improved controller.

The estimation of the parameter r1.

The estimation of the parameter r2.
Figure 4 is the system state under the proposed controller; we can see that, when uncertainties exit, system can converge to the equilibrium point adding the improved controller; Figures 5 and 6 show that at the same time the estimation of the parameters is stable at fixed values.
5. Application in Intelligent Vehicle
Take the improved controller for the trajectory tracking control of intelligent vehicle and define the output functions as:

The control objective is making the output function


where ε = ϕφ – ϕ – φ and ρ = ϕγ – ϕ – γ are composition of errors.
Define sliding mode surface:

Then
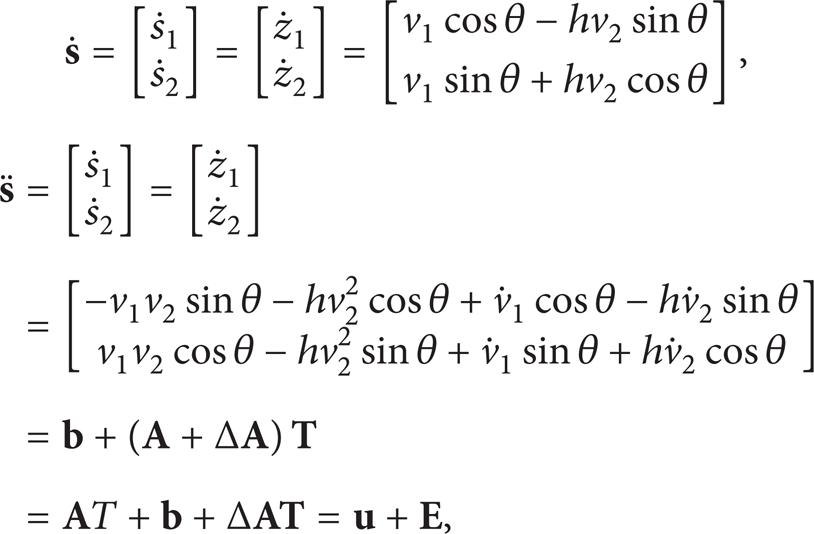
where
where
The controllers are

The actual control input T =
Define the desire trajectory as

Let the center of gravity of the intelligent vehicle tracking a given elliptic. System parameters are m = 4 kg, R = 0.03 m, D = 0.15 m, I0 = 2.5 kg · m2, h = 0.3, ΔR = 0.1R sin (5t), Δm = 0.4 m, and
Simulation results are as shown in Figures 7, 8, and 9.

Position tracking result.

Tracking errors.

The estimation of controller parameters.
Figure 7 shows the position trajectory tracking result, and the intelligent vehicle can track the given trajectory from random position. Figure 8 shows the tracking errors of the defined outputs. Both of the errors converge to zero in finite-time. Figure 9 shows the estimation of the four controller parameters; we can see all of them converge to fixed values. Compared with [12, 13], uncertainties are considered in our paper, which is very important in practical system. Compared with [14, 15], we can obtain finite-time convergence. Compared with [16], we do not need to add observer to estimate the bounds of uncertainties, which reduce the workload. In a word, the method proposed in this paper is simple, effective and practical.
6. Conclusions
In this paper, for the finite-time trajectory tracking problem of the intelligent vehicle, an adaptive control method is introduced to improve the performance of the SOSM Twisting algorithm. The control gain can be adjusted automatically according to the system state, which requires no prior knowledge of the bounds of uncertainties. From the theory developed and simulation results we can see that the improved algorithm can work on an uncertain system effectively, the intelligent vehicle successfully tracking the given trajectory in finite-time.
Footnotes
Acknowledgment
The authors acknowledge the support from the National Natural Science Foundation of China (Grant no. 61375100).