
Abstract
Currently, maritime search and rescue (MSR) is mainly depending on the search party, while the searching objects are waiting passively. Therefore, a new method of MSR which is based on the wireless sensor network (WSN) techniques is proposed in this paper. WSN could be self-organized into network and transmit nodes information, such as position information, for search party to accomplish the search and rescue work. However, the application encounters the problems of dynamic adaptability and life cycle limitation at sea. An energy dynamic distribution and optimization algorithm (EDDO), which is based on genetic algorithm (GA), is presented to handle with these problems. The algorithm satisfies the connectivity and energy saving of the network, and the GA with elitism-based immigrants approach is put forward to optimize the poor individuals when the positions of some nodes have changed. Simulation results show that the algorithm can quickly adapt to a dynamic network and reduce energy consumption at the same time.
1. Introduction
Maritime search and rescue (MSR) generally searches the targets by the technology of satellite and radar. There are some new technologies that have been applied to MSR, such as machine vision. However, the search work is dependent on the effort by the search and rescue party, and the rescue targets can only passively wait for the search and rescue. In recent years, with the development of the wireless sensor network (WSN), there are improvements both in computing ability and energy consumption of sensor nodes. This will be helpful for its application in MSR. In MSR-WSN, the sensor nodes were put in the life jackets and can be organized into an ad hoc network. The network locates its nodes and transmits the data of position to the sink nodes which were put on the survival craft. The sink nodes transmit the data to the base station of the SAR ships first, and then the search and rescue network center can receive the information about the targets. By this way, it will be much more quickly and accurately for the rescuers to find the targets.
Wireless sensor networks are suitable for the application of maritime search and rescue because of its features such as self-organization, self-adaptive, multihop, and robustness. In the circumstances of MSR, there is not have any base station, and nodes are highly dynamic and requires smaller size and longer lifetime. However, related researches do not pay enough attention to the application environment of MSR where WSN's nodes could not be replaced and they are moving all the time at sea. Therefore, it is crucial for nodes that their transmit power can adapt to dynamic environmental changes, the network lifetime can be extended, and the connectivity can meet the requirements at the same time.
Evolution algorithm (EA) is a bionic algorithm based on nature selection in biological evolution theory. EA has a good adaptability to complex engineering optimization problems. There are many researches about the EAs in topology control and covering algorithm of WSN. In MSR-WSN, the topology will change and the energy deployment will not be suitable for the topology when the environment changes. The most simple and direct way of energy deployment is to restart the EAs from scratch in case that an environmental change is detected. But it is more efficient to develop other solutions which make use of knowledge gathered from the original environments. Elitism-based immigrant scheme is a representative one in dynamic environments.
The remainder of the paper is organized as follows. Section 2 introduces the related topology control and is optimized by EAs and energy-based topology control in WSN. Section 3 presents the proposed WSN energy distribution and optimization solution at sea which is based on the genetic algorithm (GA) in EAs. Section 4 introduces the setup of the simulation and the results of analysis. Section 5 concludes this paper and suggests some topics for future research.
2. Related Work
Many studies in MSR research the runaway boat drift model or the best search area via applying the operations research, fuzzy mathematics, fluid mechanics, simulation theory, and so on. There are also some methods which introduce the new information techniques into MSR, for instance, the computer simulation method based on Monte Carlo. Others about multispectral analysis, machine vision, and satellite remote sensing technology are also explored in MSR [1, 2]. A common defect exists in this technology that the targets can only passively be searched; the searching objects cannot send their location information to the search and rescue party.
WSN is capable of real-time monitoring and collecting the objects information and can send the information to gateway nodes. The rapid and self-organization deployment and network survivability features of WSN will meet the environment and application characteristics in MSR. Kim et al. [3] designed a kind of equipment which can send GPS location information and mayday distress signal to help locate victims in offshore area; they also referred to WSN technology, but the key technical issues, such as how to organize the network, are not addressed.
An important purpose of wireless sensor networks topology is to extend the life cycle of the network as possible. In MSR-WSN, the lifetime of the network is also very important. In [4], the optimal coverage problem was taken as a 0/1 sequence problem in which “0” stands for the node was sleeping, “1” stands for the node was working, and the evolution algorithm was adopted to optimize the 0/1 sequence. This method can save the energy effectively, while in MSR-WSN there will not be so many nodes to make some of them sleep, and no one in water can lose the connectivity with others; thus the sleeping mechanism is not the best one. Konstantinidis and Yang [5] defined the dense deployment and power assignment problem (d-DPAP) in WSNs and proposed a multiobjective evolutionary algorithm based on decomposition (MOEA/D) hybridized with a problem-specific generalized subproblem-dependent heuristic (GSH). In their method, the d-DPAP is decomposed into a number of scalar subproblems, and the subproblems are optimized in parallel by using neighborhoods information and problem-specific knowledge. But this method does not take full account of the dynamic of the nodes.
The algorithms DRNG and DLMST were proposed in [6], and they are based on the proximity graph theory. In both algorithms, each node collects the information of the surrounding neighbors and then determines their own transmit power to ensure the connectivity of network. Chen et al. [7] proposed the SPAN protocol in which each node can sleep if its two random neighbors can communicate with each other; otherwise the node must be in working state. In the ASCENT [8] protocol of Cerpa and Estrin, the nodes can determine the working state of their own according to the detected local communication situation and decide the transmit power according to the packet loss rate.
Glauche et al. [9] defined critical node degree as the required size of the node degree that can keep network full connectivity. On the account that they proposed a distributed algorithm to ensure that the ad hoc network can communicate, the algorithm adjusts nodes' communication radius to guarantee the satisfaction of the critical node degrees. Jiang and Bruck [10] controlled the network topology by adjusting the radius of nodes communication and proposed an algorithm to ensure that any source node can communicate with the sink node. But in this paper, the algorithm does not take account of the energy savings and the network lifetime. Liqun et al. [11] proposed a power control method based on continuous time slot scheduling and proved the NP-completeness of it. This method requires the network to maintain strict time synchronization, and the fairness between the nodes is not considered. The application-oriented fault detection and recovery algorithm (AFDR) [12] is mainly to limit the impact of critical node failure on coverage and connectivity in wireless sensor and actor networks (WSANS). The algorithm needs a moving backup actor to detect the critical node failure, and then the recovery process is initiated, yet the backup actor in MSR-WSN is not practicable because sensor nodes cannot move by themselves and cannot be replaced.
All of these researches are very helpful for the topology control of our MSR-WSN, but they are mainly for static wireless sensor networks and have a poor adaptability for MSR-WSN. For instance, the methods in [4, 7] could extend the lifetime of the network, but sleeping mechanisms is not suitable for MSR-WSN. Therefore, it is necessary to carry out specific research related to the two requirements that are higher dynamic adaptability and longer lifetime of MSR-WSN.
3. Model and Algorithm Design
3.1. System Model
In this section, we present our network model and then formulate the problem of energy dynamic distribution and optimization of nodes in the MSR-WSN.
In the MSR-WSN, there have been a certain number of homogeneous sensor nodes and a small amount of sink nodes. The sensor nodes are placed in lifejackets with limited energy, and the number of them is N. The sink nodes are placed in survival crafts with unlimited energy, and they can move by themselves. Sensor nodes can be organized into a network and identify the sink node which has entered the convergence range of the network. The sensor nodes transfer data to the sink node after identifying the sink node. The sensor nodes are responsible for regularly transmitting the information, such as nodes' location or monitoring data, to the sink node. Each sensor node communicates to the sink node directly or in the form of a multihop. The network topology dynamically changes as the movement of sensor nodes and sink nodes. Then the energy distribution should change with the topology, so that the energy can be saved, and consequently the lifetime of network can be extended.
We assume a perfect medium access control, such as SMAC [13], which ensures that there are no collisions at any sensor during data communication, and we adopt the simple but relevant path loss communication model as in [14]. In this model, the transmit power level that should be assigned to a sensor i to reach a sensor j is
The residual energy of sensor i, at time t, is calculated as follows:

3.2. Problem Formulation
The problem of energy distribution and optimization is given as follows:
A: a 2D plane, where the sensor nodes are distributed; N: the number of the sensor nodes in region A; E: the initial energy of sensor nodes;
Decision variables of a network design X as follows:
(
Objectives are to maximize connectivity and minimize energy consumption of the network.
The network connectivity is defined as the fact that each node can communicate with the sink node directly or indirectly, and the network energy consumption is defined as the sum of all sensor nodes' emission energy.
Connectivity: for any

During the process of EDDO,
3.3. Solution Representation and Ordering
In this paper, a candidate solution X consists of N items which corresponding to the N sensor nodes. The jth item of X has two parts, which represent the location (
The location (
3.4. The Energy Distribution Based on Genetic Algorithm
In recent years, genetic algorithm (GA) is a popular optimized method which has a parallel search and group optimization features. GA is a kind of bionic algorithm; this type of algorithms can solve many complex engineering problems without the mathematical properties of them.
3.4.1. The Algorithm Coding Mapping and Population Initialization
According to the real-coded ideological of K. H. Jin, each individual represents a power allocation scheme of MSR-WSN. The genome of the population of individuals is


During the population initialization process, each node determines its own transmit power according to the distance of the sensor and H or the distance between sensors. Firstly, the sensors are sorted based on their distance to H such as Algorithm 1 referenced [18], where 1 is the closest and N is the farthest sensor location with respect to H, respectively. X is showed in Figure 1, where the transmission power of each of the node j is proportional to the transmitting radius

Initial solutions X of N individuals (Pareto charts).
Algorithm 1.
The representation process for each solution Y

This process of topology generating is simple and convenient, but it does not have the dynamic adaptability and is not conducive to the followup topology control. In MAR-WSN, the sink node H can move freely, and the sensor nodes will move with water waves. Therefore, the distribution of node power should be optimized constantly as the time goes by, so that the energy consumption level of each node can adapt to the network well.
3.4.2. The Selection of the Objective Function
For the given solution, we need to accurately estimate its quality (fitness value), which is determined by the fitness function. In this paper, we aim at finding a solution which ensures the nodes that can communicate with H with as little as possible of the energy consumption. The quality of solution

In addition, we made the value as the comparison reference which is the ratio of the average power of all nodes and the total transmits power. The comparison reference is calculated and simplified as follows:

The fitness function can select out the nodes whose transmit power is less than the average power in the network. Then the selected nodes will be the cross-object nodes which instead of those nodes whose transmit power is more than average power. By this way, the nodes whose transmit power is overload will be optimized, and they will not be dead quickly.
3.4.3. Selection Mechanism
Select operation can improve the average quality of the population by selecting high-quality chromosome into the next generation of the population. Chromosome selection is based on the fitness value. Selection operation selects the chromosomes according to the constraint environment of each individual (that are the distances between the sensor and its neighbors), the position dynamically change information, and the fitness of X as follows:
When When
3.4.4. Crossover and Evolution
The genetic algorithm is based on two basic genetic operation that are cross-operation and evolution operation. The cross-operation handles the current solution in order to find a better solution. The evolution operation can help the GA to avoid falling into local optimal solution [8]. The effect of the genetic algorithm depends on these two steps. In this paper, we crossed the genes
The updating formula after crossover operation is such as

The new chromosome should be evaluated that it could communicate with H, after that the updating operation can be performed. The evaluation processed as the Algorithm 2.
Algorithm 2.
The updating process
3.5. The Energy Dynamic Distribution and Optimization Based on GA
For dynamic optimization problem, the GAs should maintain a certain level of solution diversity to keep the solution adapting to the changes in the environment; then the convergence problem becomes very important. To address this problem, the random immigrants approach is a quite natural and simple way [19, 20]. It was proposed by Grefenstette with the inspiration from the flux of immigrants that wander in and out of a population between two generations in nature. It maintains the diversity level of the population through replacing some individuals of the current population with random individuals, called random immigrants, every generation. As to which individuals in the population should be replaced, usually there are two strategies: replacing random individuals or replacing the worst ones [21]. In order to avoid that random immigrants disrupt the ongoing search progress too much, especially during the period when the environment does not change, the ratio of the number of random immigrants to the population size is usually set to a small value, for example, 0.2.
However, if the environment of nodes changes slowly, the introduced random immigrants may divert the searching force of the GA and hence may degrade the performance. On the other hand, if the environment of nodes only changes slightly in terms of severity of changes, random immigrants may not have any actual effect even when a change occurs because individuals in the previous environment may still be quite fit in the new environment. Based on the above considerations, an immigrants approach, called elitism-based immigrants [22], is proposed for GAs to address the energy deployment problem.
For each generation t, after the normal genetic operations (i.e., selection and recombination), the elite
The whole energy dynamic distribution and optimization (EDDO) algorithm is described as Algorithm 3. In the genetic operation of Algorithm 3, if the mutation probability
Algorithm 3.
The energy deployment general framework
4. Simulation and Analysis
4.1. Simulation Setup
In the environment of MSR-WSN, we designed the region A which is 1000 m × 1000 m, and 100 sensor nodes are randomly distributed in the region. The medium access control, such as SMAC, is introduced in Section 3.1, and its parameters were set according to [5]. In our experimental studies, the parameters of algorithm are set as in [9]. That is, the number of power levels
During the experiment, to imitate the dynamic nature of the actual environment, we made the nodes move randomly like

4.2. Simulation Scheme
The simulation experiments were realized through MATLAB 7.0 to verify feasibility and validity of the proposed algorithm.
We compared the EDDO algorithms with SGA and Restart GA at first as in Section 4.2.1. After that we compared the EDDO with other algorithms about energy as DRNG and DLMST in Section 4.2.1.
4.2.1. Comparisons with SGA and Restart GA
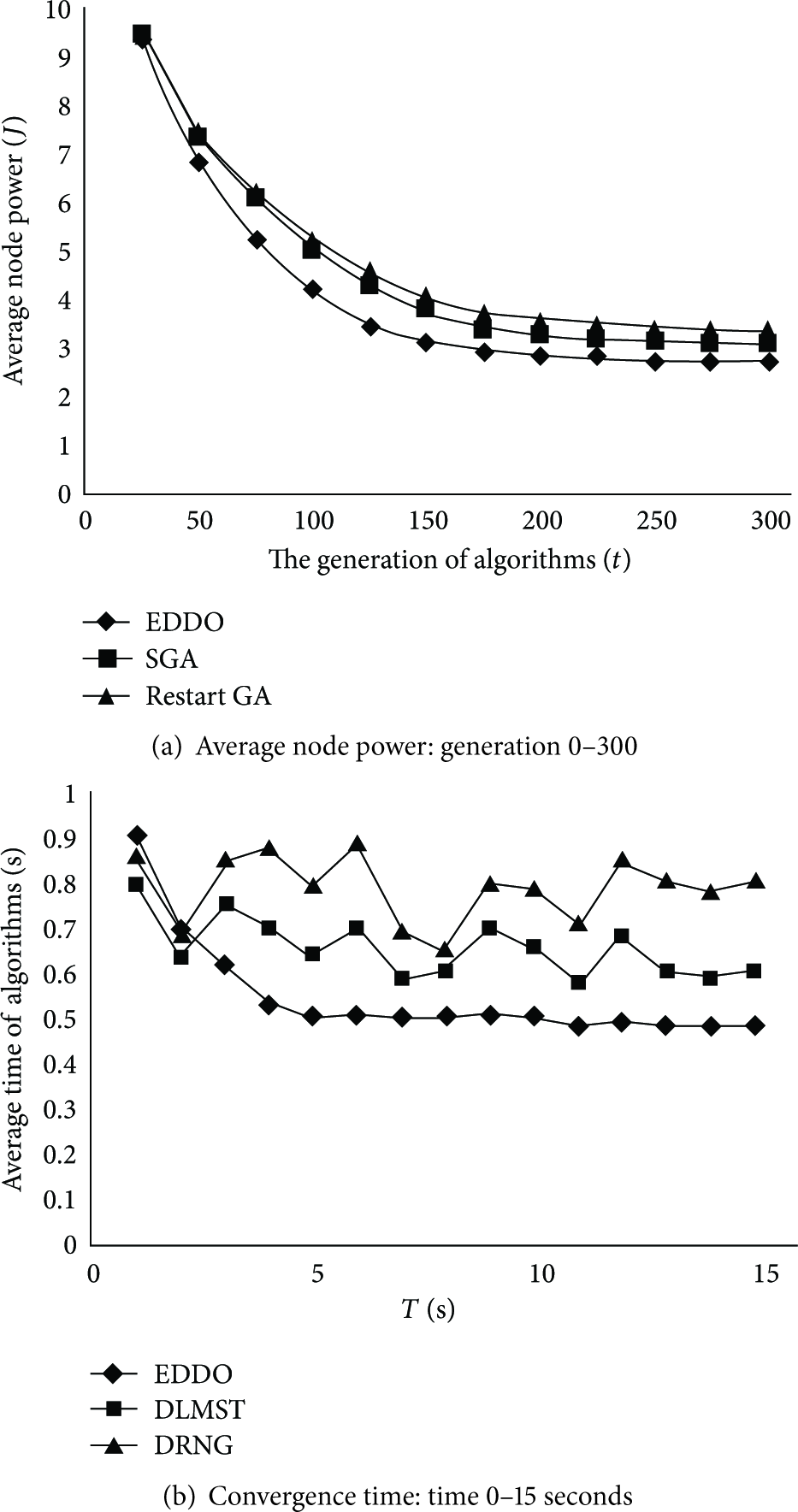
Figure 2(a) shows that average node power obtained from the proposed EDDO algorithm, the SGA, and Restart GA. We can see that with the increasing of the population generation, all the algorithms could achieve the convergence solution. But the EDDO algorithm is faster than the SGA and Restart GA because of its elite scheme. And the final average node power of the algorithm is lower than that of SGA by about 0.3 J in one convergence.
Comparisons with SGA and Restart GA.
Figure 2(b) shows that the convergence time of the EDDO algorithm would be much lower than the time of SGA and the Restart GA. It indicates that the EDDO algorithm can adapt to the dynamic movement of nodes because the algorithm makes full use of the excellent solution in the original environment and the immigrant also contributes to the convergence speed. With time goes by, the convergence time of the algorithm becomes relatively stable and is lower than the SGA by about 13.7%.
4.2.2. Comparisons with Other Algorithms
Figure 3 shows the comparison with the DLMST and DRNG algorithms [4] in which every sensor determines its power based on the information of neighbors. We can see that the average power of three algorithms is almost the same in Figure 3(a) and the average power of the whole time of the EDDO algorithm is a little higher than the other two algorithms. However, the running time of these three algorithms is different in Figure 3(b) and the EDDO algorithm is the best one here. It dues to the algorithm in this paper can seek the optimization solution overall the nodes, while in the DLMST and DRNG every node takes account of itself only. The local information could help DLMST and DRNG to adapt the dynamic change of networks in a certain extent, but it is not very helpful for the whole network. And the two algorithms' execution time is not so stable than that in the EDDO algorithm.

Comparisons with DRNG and DLMST algorithms.
5. Conclusion
In this paper, the energy distribution problem of MSR-WSN is defined as a deployment solution that should take account of the connectivity and the lifetime of the network. The problem is modeled in the environment at sea, and the appliance process of the network has been described at first. In the procedure of solving the problem, the dynamic nature and energy consumption of the nodes is focused on in the harsh environment of sea. Introducing the genetic algorithms with elitism-based immigrants, we made the energy distribution method adapt to the dynamic change of the nodes position and convergent more quickly. In the future, we will study a more efficient and perfect topology control method of the MSR-WSN.
Footnotes
Acknowledgments
This work was supported by the National Natural Science Foundation of China (51279099), the Shanghai Natural Science Foundation (12ZR1412500), the Innovation Program of Shanghai Municipal Education Commission (13ZZ124), and the “Shu Guang” Project supported by the Shanghai Municipal Education Commission and Shanghai Education Development Foundation (12SG40).