
Abstract
Vibration signal of plunger pump in truck crane is a typical nonlinear, nonstationary signal, and the multifractal features are a powerful tool for depicting the geometry features of such signals. The wavelet-leaders based multifractal features extraction method is an attractive tool, which has solid theoretical mathematical support and a simplified calculation procedure. The wavelet-leaders based multifractal features extraction method is compared for the original signal and the denoised signal, and the statistical performance of the obtained features is also introduced based on block bootstrap technology. The effectiveness of the wavelet leaders based method is first verified for a traditional multifractal signal. Then, the application of the proposed method to the pump vibration signals of three working conditions of truck crane: lifting, rotating, and luffing is discussed. The result shows that the geometry features of vibration signals can be obtained with wavelet leaders multifractal analysis method, and the denoising process improves the multifractal features.
1. Introduction
In truck crane, the plunger pump is an essential apartment, and the quality of the pump affects the performance of the hydraulic system, even the whole equipment, directly. So, it is very important to monitor the condition and diagnose the fault of the pump. In order to achieve this goal, a considerable research focused on the vibration signals [1, 2], and extracting the features relevant to the mechanical conditions is of great consequence. Mechanical vibration signal is a typical nonlinear and unstable signal. The traditional feature extraction methods based on linear system do often fail to work effectively. As multifractal features can fully display the distribution of signal's singularities, the geometric characters and the local scaling behaviors [3, 4], wavelet transform based multifractal analysis approaches, are widely used.
Recently, a new multifractal analysis method based on wavelet leaders was proposed by Lashermes, Jaffard, and Wendt [5–7]. Based on discrete wavelet transform (DWT), the new method has solid theoretical mathematical support and complicated calculation is avoided. Furthermore, it successfully describes the characters of spectrum on a full domain (for the negative orders qs and the positive orders qs). However, in practical applications, the wavelet leaders based vibration analysis also has some unknown characters. First, the mechanical vibration signal always consists of noise. The effect of the noise is worth studying. Second, in the classic reference [6], the block bootstrap based performance access method is employed with a fixed block length. But the dependence of the coefficients on different levels of wavelet is not the same. The selection of the optimal block length of wavelet coefficients vector is another question. The detailed introduction about the previous questions will be researched in this paper, in the following, and comparison studies about wavelet leaders based multifractal features extraction for original and denoised vibration signals of plunger pump in truck crane will be carried out.
This paper is organized as follows. The symptoms of vibration signal of plunger pump in truck crane and wavelet leaders based multifractal features are briefly introduced in Section 1. Section 2 presents the theory of extracting multifractal features with wavelet leaders. In Section 3, a detailed discussion on the scheme of wavelet leaders based vibration signals multifractal features extraction is presented. In Section 4, the effectiveness of the proposed multifractal features extraction method is tested by using plunger pump signals, and the results by direct multifractal features extraction are also given for comparison. A conclusion is given in Section 5.
2. Wavelet Leaders Based Multifractal Features
2.1. Introduction of Wavelet Leaders
Suppose a function ψ0(t) with the vanishing moment Nψ satisfies the admissible condition then ψ0(t) can be selected as mother wavelet. Let {ψ j, k (t) = 2−j/2ψ0(2−jt – k), j ∈ Z, k ∈ Z} denote templates of ψ0(t) dilated to scales 2 j and translated to time positions 2 j k, and they form an orthonormal basis of L2(R). For signal X = {x k , k ∈ Z}, the discrete wavelet transform is

Further, assume that ψ0(t) has a compact time support, and define dyadic interval λ = λ
j, k
= [k · 2
j
, (k + 1) · 2
j
]. Let 3λ denote the union of the interval λ with its two adjacent dyadic intervals: 3λ
j, k
= λj, k – 1 ∪ λ
j, k
∪ λj, k + 1. Then, the wavelet leader of position k in j scale is defined as [5]

Definition of wavelet leaders.
2.2. Wavelet Leaders Based Multifractal Features Extraction
Mechanical vibration signal has a typical nonlinear and nonstationary character. When the machine state changes from one work condition to another work condition or fault state, a sudden change always appears in vibration signal. The multifractal analysis can describe such special character of the signal geometric structure [8]. From the scaling exponents function, whether the signal is a single fractal or a multifractal signal can be judged, and the function also reflects the singularity to a certain extent. The longitudinal and the horizontal ordinates of the multifractal spectrum have concise physical meanings, which depict the uniformity of signal measure and reflect the strength of singularity.
For signal X, the wavelet leader of position k in j scale is denoted by L X (j, k). Let S L (q, j) be the structure functions, and the scaling exponents are denoted by ζ L (q) [9]; here, q is the order of these multiresolution quantities

The multifractal spectrum D(h) can be obtained by the Legendre transform of the scaling exponents

In addition, with the Chhabra algorithm, the Legendre transform can be avoided, and the empirical expression of multifractal spectrum is obtained [10]
where
3. Procedures of Vibration Signals Multifractal Features Extraction
In order to get multifractal features from the vibration signal, the wavelet leaders based multifractal analysis with a wavelet denoising algorithm and bootstrap based performance evaluation are proposed and examined. The procedure for applying the proposed method is given in detail next.
Step 1 (denoising with the wavelet method). In actuality, the vibration signals are often contaminated with noise. It is verified that the noise can affect the value of fractal and further cause the analysis error. Thus, the contaminated signal denoising is one of the important steps in fractal analysis. Due to its good localization and multiresolution features in the time-frequency domain, the wavelet transform has been widely used. In this step, the selection of the wavelet basis and the decomposition level are based on the minimization of the cost functional of entropy [11].
Step 2 (multifractal features extraction). As mentioned in Section 2, the scaling exponents and the multifractal spectrum can reflect the singularity of the vibration signal, so they are selected as the features for condition monitoring and fault diagnosis. In this step, the selection of related parameters must be considered. First, the choice of mother wavelet and its vanishing moment is mainly based on the tradeoff between the relief of frequency aliasing and the preservation of spatial characterization. Second, the orders qs are chosen in a scope that avoids the linearization effect in the estimation procedure of scaling exponents, which is obtained by
Step 3 (performance evaluation of multifractal features). The scaling exponents and the multifractal spectrum belong to a statistical character, and performance analysis of these features is a principal means for exploring the stability and the confidence level. For the practical signal, the confidence level cannot be obtained by analytical method. The nonparameter bootstrap method is used to evaluate the statistical values in this step. Because the wavelet leaders in the same decomposition scale in general cannot satisfy the independent and identically distributed (i.i.d), the block bootstrap technology is adopted for the wavelet leaders, and then the multifractal features with the produced pseudosamples are extracted; finally, the confidence level is obtained by these statistical values.
An optimal block length of wavelet leaders vector is required for the block bootstrap method. Here, based on the flat-top lag windows presented by Politis and White [13], a spectrum estimation approach is adopted to estimate the optimal block length, which guarantees a minimum mean square error of block bootstrap variance estimates.
4. Simulation Study and Plunger Pump Working Conditions Analysis
4.1. Simulation Signal Study
In this section, we select a popular fractal signal “devil staircase,” whose multifractal spectrum has an analytical solution, to evaluate the performance of the wavelet leaders approach by comparing with the result of the analytical method [14].
For the triadic Cantor set measure μ, define f: [0,1] → [0,1] as the distribution function of μ,

As the measure of Cantor set is constructed recursively with the two distribution weights p i (i = 1,2) and it looks like a staircase, the function is called the “devil staircase” and the graph is self-similar

For this function, the scaling exponents can be calculated analytically by
The multifractal spectrum can be obtained by the following formula:

Figure 2(a) shows the scaling exponents of the “devil staircase” function obtained by the analytical method and wavelet leaders method, respectively. It can be seen that the difference is very small, especially for q > 0. The multifractal spectra with the previous two approaches are shown in Figure 2(b). The spectrum obtained by the wavelet leaders with Legendre transform method almost coincides with the theoretical spectrum, which validates that the wavelet leaders based scaling exponents are effective. In addition, the multifractal spectrum obtained by the wavelet leaders with Chhabra regression method seems to deviate from the analytical result distinctly. The reason may be the regression with limited scales data and the scale weight distribution. However, the obtained spectrum still reflects the multifractal character of the “devil staircase” function. This is attributed to the two spectra having a similar shape. Furthermore, the three of four parameters used to characterize the spectrum [15], which are the minimum and the maximum of the Holder index corresponding to the two spectra, and the range of the Holder index, are similar; as for the fourth parameter, which is the h* of the wavelet leaders with Chhabra regression method that corresponds to the Holder index of the maximum Hausdorff dimension, it is about 0.65 and agrees with the analytical method.

Scaling exponents and multifractal spectrum of the “devil staircase.” (a) Scaling exponents obtained by analytical method and wavelet leaders method, respectively. (b) Multifractal spectrum obtained by analytical method, wavelet leaders with Legendre transform method (wavelet leaders-1), and wavelet leaders with Chhabra regression method (wavelet leaders-2), respectively.
4.2. Plunger Pump Working Conditions Analysis with the Proposed Method
In order to realize the condition monitoring or fault diagnosis of plunger pump in truck crane, the working condition is required to judge firstly. In different working conditions, the states of the pump are different. So, the multifractal features of the vibration signal of the pump can be used to determine the working condition of the truck crane.
The plunger pump is seated on the truck crane, and the pump type is Linde HPR130, which has nine plungers. Three accelerometers mounted on the pump surface are used to obtain the vibration signal. The accelerometers are located in the horizontal direction of the bearing (1#), the vertical direction of the bearing (2#), and the horizontal direction of thrust plate (3#), respectively. The experiment data is collected from accelerometer 1#. The rotating speed of the pump is about 850 r/min, and the vibration signals are collected for hoisting, rotating, and luffing conditions at a sampling rate of 20 kHz. The waveforms of the original signals are shown in Figure 3, each consisting of 4096 points.

Waveform of vibration signals of plunger pump in three working conditions. (a) Hoisting. (b) Rotating. (c) Luffing.
First, the original vibration signal is denoised with wavelet method. The Daubechies' wavelets with different vanishing wavelet moments (from “db1” to “db10”) and “sym8” wavelet consist of a wavelet library. The wavelet basis and the decomposition level are selected based on minimizing the cost functional of entropy. For the previous three vibration signals of different working conditions, they are decomposed into 10 levels, and the wavelet basis and the corresponding decomposition level with the minimal Shannon entropy are listed in Table 1, and the denoised signals are shown in Figure 4.
The wavelet basis and the corresponding decomposition level with the minimal Shannon entropy.


Waveform of denoised vibration signals of plunger pump in three working conditions. (a) Hoisting. (b) Rotating. (c) Luffing.
Second, the wavelet leaders based multifractal features extraction method is employed to extract the vibration features. Considering the tradeoff between the relief of frequency aliasing and the preservation of spatial characterization, the db3 Daubechies' wavelet is selected as mother wavelet. For these three denoised vibration signals, c2 are estimated on the data sets by bootstrap technology. As shown in Figure 5, q are calculated as 2, 6, and 5 for hoisting, rotating, and luffing conditions, respectively. For convenient comparison, the scopes of q are selected as q*± = ± 6. In order to use the empirical expression of multifractal spectrum, the scaling range of regression should be determined according to the plot of ζ L (q) versus log22 j = j. Taking the vibration signal of rotating condition as an example, Figure 6 shows that the scaling range is appropriate in the scope of 2 to 9. According to these parameters, decompose the vibration signals of the mentioned three conditions into nine levels and extract the wavelet leaders of wavelet coefficients in each level, respectively. The multifractal features, including the scaling exponents and the multifractal spectrum, are obtained with formulae (2) and (4).

Estimation of c2 of the vibration signals based on bootstrap technology, the number of resample is 49. (a) Hoisting. (b) Rotating. (c) Luffing.

Relationship between scaling exponents ζ L (q) and scale j for rotating condition.
The multifractal features for the three conditions are shown in Figures 7, 8, and 9. The relations of ζ(q) and q are nonlinear for the three conditions, which indicates that the vibration signals have the multifractal characters. Furthermore, all the multifractal spectra of the three conditions are unimodal functions, which also verifies that the signals have multifractal characters. But the precise singularities of these three signals are different as to the multifractal parameters [15], though all of the maximum of D max (h) are close to 1. From the curve of multifractal spectrum, for the hoisting condition, the Δh = h max – h min is about 1.65, which is larger than 0.55 of rotating condition and 0.73 of luffing. For the second parameter ΔD = D max – D min , it is 1.1 for hoisting condition and 0.3 and 0.02 for luffing condition and rotating condition, respectively. As for the third parameter h0(D max ), it is 1.0 for hoisting condition and 0.35 and 0.3 for luffing condition and rotating condition. All of the parameters explain that the most singular is the vibration signal of hoisting condition, and the next is that of luffing condition. The vibration signal of rotating condition is the most regular.

Multifractal features and the statistic performance of the vibration signal in hoisting condition.

Multifractal features and the statistic performance of the vibration signal in rotating condition.

Multifractal features and the statistic performance of the vibration signal in luffing condition.
In order to evaluate the statistic performance of the obtained multifractal features, the bootstrap technology is utilized to resample the wavelet leaders in each level. Then, the scaling exponents and the multifractal spectrum are calculated with the produced pseudosamples, and the statistic performances of the multifractal features are obtained. The optimal block length of each level is listed in Table 2. It shows that there exists various degrees of correlation among wavelet leaders in the same level. In the small level, the correlation is stronger, but in the 9th level, the leaders are almost independent of each other. For most of the levels, the wavelet leaders of hoisting show a stronger correlation.
The block length of bootstrap for the vibration signals of three working conditions.

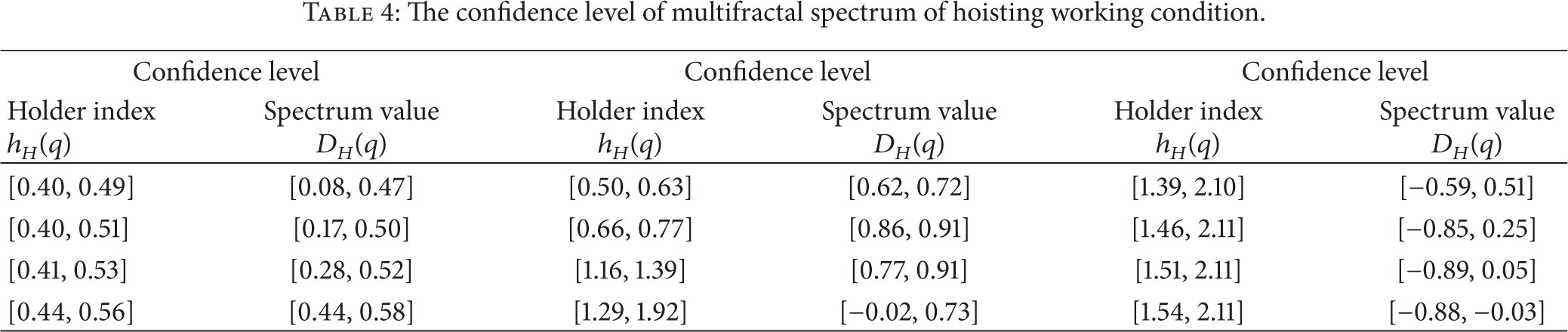
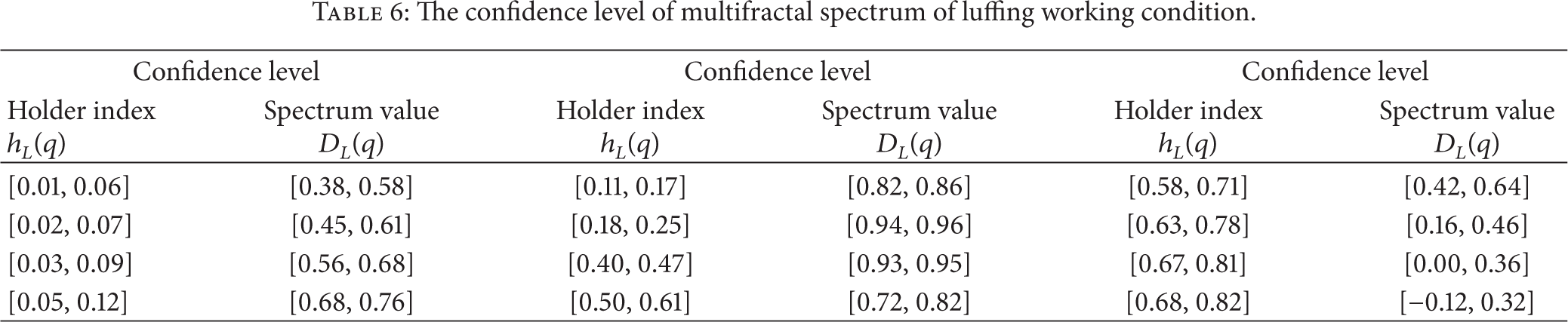
Set the sampling times of bootstrap to 49 and calculate the multifractal features with the obtained bootstrap samples. The confidence levels of the multifractal features are shown in Figure 7 to Figure 9. Table 3 lists the scaling exponents of the previous three conditions, and ζ H (q), ζ R (q), and ζ L (q) correspond to the scaling exponent of hoisting, rotating, and luffing conditions, respectively. From Tables 4, 5, and 6, it further reflects the confidence level of multifractal features of the vibration signal. In the tables, D H (q) and h H (q) are multifractal spectrum value and Holder index of hoisting condition, respectively, and D R (q) and h R (q) are multifractal spectrum value and Holder index of rotating condition, respectively, while D L (q) and h L (q) correspond to multifractal spectrum value and Holder index of luffing condition, respectively. From Tables 4 to 6, when q is in the scope of [−2, + 2], the multifractal features are more concentrative, and the corresponding confidence levels are narrow; out of this scope, the multifractal features are dispersive, and the confidence levels are wide.
The confidence level of scaling exponents of three working conditions.

The confidence level of multifractal spectrum of hoisting working condition.
The confidence level of multifractal spectrum of rotating working condition.

The confidence level of multifractal spectrum of luffing working condition.
The proposed wavelet leaders based multifractal features extraction method is compared with the direct wavelet leaders based multifractal features extraction method. The latter does not include the denoised step. The obtained multifractal features with the direct method are shown in Figures 10, 11, and 12. For the working conditions of rotating and luffing, the shapes of multifractal spectrum change little, and the parameters representing the singularity are Δh = 0.55, ΔD = 0.01, and h0(D max ) = 0.3 for rotating condition, respectively, and the corresponding parameters are 0.72, 0.3, and 0.35 for luffing condition, respectively. But for the working condition of hoisting condition, the shape of multifractal spectrum changes considerably, and the parameters representing the singularity change to Δh = 0.76, ΔD = 0.42, and h0(D max ) = 0.45, respectively. This indicates that the singularity of the vibration signal is enhanced by the denoised process, and the multifractal characters of the vibration itself are highlighted.

Multifractal features and the statistic performance of the vibration signal without denoising process in hoisting condition.

Multifractal features and the statistic performance of the vibration signal without denoising process in rotating condition.

Multifractal features and the statistic performance of the vibration signal without denoising process in luffing condition.
5. Conclusions
In this study, an improved wavelet leaders based multifractal features extraction scheme is proposed for the plunger pump in truck crane. The wavelet transform is used first to denoise the original signal, and then the wavelet leaders based multifractal features are calculated on those obtained denoised signals; finally, to evaluate the performance of the obtained statistic features, the block bootstrap technology is utilized. The case of “devil staircase” verifies that the wavelet leaders based analysis method can extract the multifractal features effectively. The vibration signals of the plunger pump in the truck crane are used to validate the capability of the improved wavelet leaders based multifractal features for the contaminative signals, and the performance of the proposed method is also compared with that of the direct wavelet leaders based scalogram through this case study. The results show that (1) the proposed method is not only qualified in multifractal features extraction, but also evaluates the performance of the obtained statistic. (2) The proposed method is utilized to analyze the vibration signals of the plunger pump in the truck crane in three working conditions, and the results indicate that the multifractal characters of the vibration are highlighted. (3) The multifractal method with denoised process has better performance, which means that the proposed method is more suitable for contaminative signal analysis in condition monitoring.
Footnotes
Acknowledgments
This work is supported by the National Natura Science Foundation of China (Grant nos. 51205371 and 61175038), National Basic Research Program of China (“973” Program) (Grant no. 2013CB035400), Innovation Program of Shanghai Committee of Science and Technology (Grant nos. 11dz1121500 and 11JC1405800), and the Research Project of State Key Laboratory of Mechanical System and Vibration (Grant no. MSV-2012-06).