
Abstract
RN and SSR approaches are designed to detect NLOS propagation paths in this paper. When the NLOS propagation paths are detected, an estimation approach for the NLOS range errors is proposed by using residual-error decomposition. The approach can estimate the NLOS range errors quickly and effectively, even if there are multiple NLOS propagation paths. Combining the movement equation with observation position, the position of mobile target node can be tracked precisely with Kalman filter algorithm. Using the estimated NLOS range errors, we correct the localization result and modify Kalman filter to mitigate the NLOS propagations. The simulations demonstrate the validity with RN and SSR detection methods and analyze the impacts of NLOS range errors and number of NLOS anchor nodes. The estimated NLOS range errors are proved to be close to the true especially when the NLOS range errors are much bigger than LOS range errors. The simulation results show that the position of target node can be tracked precisely and effectively, when the NLOS mitigation is used to track the target node position with modified Kalman filter.
1. Introduction
Recent advances in wireless communications, microelectro mechanical systems, electronics, and distributed processing technology have enabled the deployment of large numbers of cheap and smart sensor nodes to construct wireless sensor networks (WSNs). Deployed in the monitoring region, a large number of sensor nodes form a multihop ad hoc network system through wireless communication. These networked sensors are able to process sensed data locally and extract relevant information, to collaborate with other sensors on the application specific task and to provide the resultant information about the monitored events for a number of potential applications, ranging from battlefield monitoring and environmental surveillance to health care [1–3]. To make the data collected from sensor nodes meaningful, it often requires related node positions. Target localization and tracking of mobile nodes are important research directions in WSNs [4–10].
It is often the case with a general assumption that the positions of nodes deployed in the monitoring region are known (called anchor nodes), so that it is possible to track the positions of the mobile target with a sensor node [11]. To track and locate the mobile target node, some measurement approaches are proposed, such as time of arrival (TOA) [12, 13], angle of arrival (AOA) [14], time difference of arrival (TDOA), and received signal strength indication (RSSI) [15]. Some hybrid approaches of TOA, AOA, TDOA, and RSSI have also been proposed for target localization and tracking. The measured results are often transmitted to base station which computes the current position of mobile target node based on the received measurements and the history. Then, the base station reports the tracking results to each sensor node or target node.
Since the range measurements are usually prone to errors, the localization result of target node will be far from the true position [16–18]. Some studies are focused on line-of-sight (LOS) assumption, so the target node can be located precisely with the traditional localization algorithms [19]. However, since the direct path between nodes can be blocked by buildings and other obstacles, the transmitted signal could only reach the receiver through reflected, diffracted, or scattered paths called nonline-of-sight (NLOS) propagation paths. Most of previous researches on NLOS propagation have focused on the NLOS identification and mitigation [20–22]. In [23], a positioning algorithm in severe NLOS propagation path scenarios is proposed to enhance positional accuracy of network-based positioning systems when the position receiver does not perform well due to the complex propagation environment. In the event that the statistics of the NLOS errors and measurement noise are known, such as those based on field trials, statistical processing can significantly reduce the NLOS effect [24]. When a database is established in advance, signature matching can be employed to greatly improve position accuracy in NLOS scenarios. By exerting constraints or introducing an NLOS error-related parameter into the cost function, optimization algorithms can be developed to mitigate the NLOS effect [25, 26]. Some of researches take advantage of the NLOS propagation paths rather than canceling them [27].
Using its movement velocities, the position of target node can be approximately estimated when the initial position of target node is known. However, the position of iterative estimation with movement equation is prone to error when the movement velocities include noises. In WSNs, the position of target node also can be located by range measurement between the target node and anchor nodes known positions. When the range measurements include noises, the localization result also would be imprecise [28]. Kalman filter (KF) to deal with the linear function and its nonlinear extension, extended Kalman filter (EKF), provide a feasible solution to mitigate the position error of the mobile target node, and therefore improving accuracy of mobile target tracking [29–31].
To track the position of mobile target node precisely, we propose to mitigate the NLOS propagations and make good use of the LOS range measurements by detecting and identifying the NLOS propagation paths. In this paper, we firstly introduce two approaches to detect the NLOS propagation paths when the range measurements conform to Gaussian distribution. The first detection approach utilizes residual of node (RN), which conforms to zero-mean Gaussian distribution when there are no NLOS propagation paths. The second approach to detect NLOS propagation paths utilizes sum of square residual (SSR), which conforms to chi-square distribution when no NLOS propagation paths exist. The anchor nodes with NLOS propagation paths are called NLOS anchor nodes, and the anchor nodes with LOS propagation paths are also called LOS anchor nodes. To identify the NLOS anchor nodes, we propose a residual-error decomposition method to estimate the NLOS range errors. The localization result can be improved when estimated NLOS range errors are used to amend the residuals. Then the corrected position is considered as observation and used to track the mobile target position precisely. The contributions of our work are summarized as follows.
(1) RN and SSR Approaches to Detect the NLOS Anchor Nodes. Using the Jacobian matrix, we derive the residuals coming from range errors between the target node and each anchor node. Applying the analysis method of multiple factor statics, we conclude that RN conforms to Gaussian distribution when the range measurements are Gaussian distributed. Then, we demonstrate that the SSR of all anchor nodes conforms to chi-square distribution when no NLOS anchor nodes exist. So, the probability of RN and SSR can be used to detect the NLOS propagation paths precisely.
(2) An Estimation Method for NLOS Range Errors Is Proposed When Multiple NLOS Anchor Nodes Simultaneously Exist. By analyzing the relationships between the errors and the residuals in the process of nonlinear minimization localization, we propose an estimation method for NLOS range errors. Since the residuals are caused by the range errors, the range errors of NLOS anchor nodes can be estimated approximately by ignoring the assigned residuals from LOS anchor nodes to the NLOS anchor nodes. Using the estimated range errors of anchor nodes, the NLOS anchor nodes can be identified correctly.
(3) To Tracking A Mobile Target Node Precisely the Modified KF Is Put Forward by Applying the NLOS Mitigation Method. By mitigating the NLOS propagation paths, the localization accuracy can be improved so the covariance of target node position would be reduced. The covariance of localized position is derived from the range noises between the target node and each anchor node. Considering the localized position as observation, the position of target node is tracked with modified KF based on the movement equation.
This paper presents an effective tracking method of mobile target node with modified KF in NLOS environment. The rest of this paper is structured as follows. Section 2 presents two detection approaches for the NLOS propagation paths. Section 3 describes the estimation method of NLOS range errors. Section 4 introduces the target tracking algorithm with modified KF in NLOS environment. Section 5 analyzes the simulation results. The conclusion is presented in Section 6.
2. Detection of NLOS Propagation Path
For simplicity, we only focus on the case of tracking a single target node in a two-dimensional field covered with multiple anchor nodes. Since most localization systems of wireless communications may suffer from the NLOS propagation paths and dense multipath situation, it is an important issue to obtain higher accuracy in determining range information. In dealing with the NLOS propagation path effects, the range measurement



Equation (3) can be solved by Gauss-Newton method. Based on a linear approximation to the components of

With the linearization of the system using Taylor series approximation, the optimization problem of (3) can be transform to







2.1. Residual of Node (RN)
Since




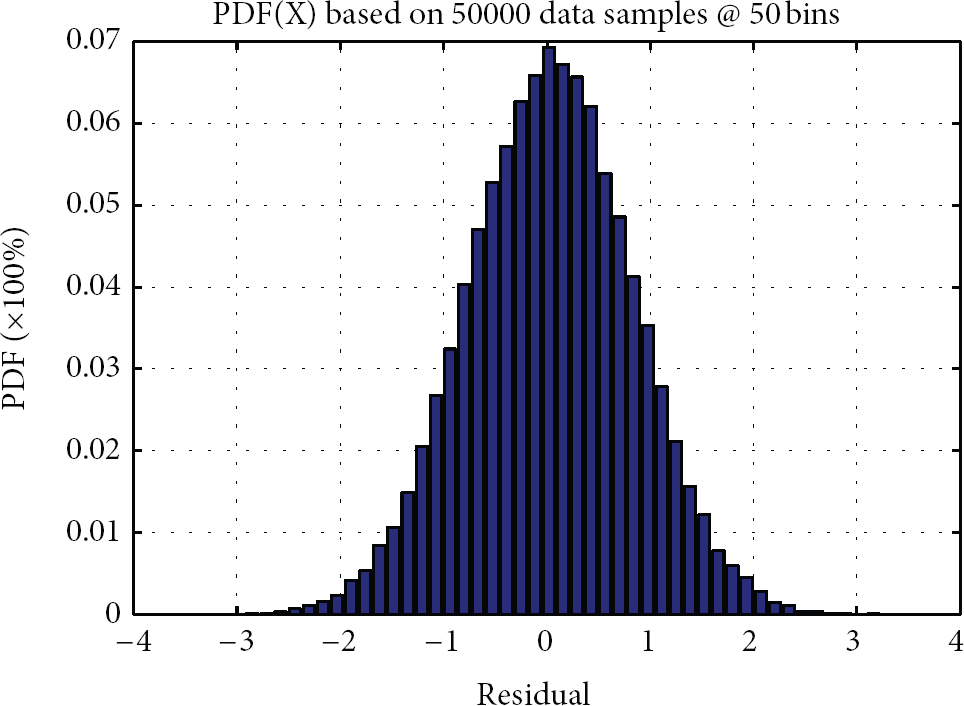
A test of RN PDF.
In the previous localization model, since there are N anchor nodes, each range measurement is likely to be NLOS. To ensure the probability of observation, β can be ensured with

2.2. Sum of Square Residuals (SSR)
The sum of square residuals




A test of SSR CDF.
3. Identification of NLOS Anchor Nodes
The range measurements may be prone to potential NLOS errors. The NLOS range measurements result in a distorted position, whereas LOS measurements can reflect originally the anticipation. In the 2-dimensional plane, node localization requires only three noncollinear anchor nodes. In most situations, the number of anchor nodes is more than three and redundant. Our idea is to identify the NLOS propagation paths and make good use of LOS measurements. When the other anchor nodes happened to be NLOS propagation paths, only using the LOS anchor nodes can locate the target node precise. Our approach is to correct the localization result and mitigate NLOS with estimated NLOS range errors, so the mobile target node position can be tracked precisely with modified KF.
If multiple NLOS propagation paths exist, it is necessary to discern which anchor nodes are the NLOS ones. In this section, we introduce a low rank residual-error decomposition method to estimate the NLOS range errors. Expanding (8), the residual between target node position i and anchor node j can be represented as

In (8),


Therefore, the NLOS range errors can be approximately estimated with

In
Recalculating the Jacobian matrix with all anchor nodes in (7) and letting


4. Tracking with Modified KF
In target tracking applications, the most popular methods for updating target node position incorporate variations of Kalman filter estimator. Kalman filter assumes that the dynamics of the target can be modeled and that noise affects the target dynamics and sensor measurements. Since the localization of target node is an optimization problem of nonlinear function, the measurement conversion method is proposed to transform the nonlinear measurement model into linear one and estimate the covariances of the converted measurement noises before applying the standard Kalman filter.
4.1. Target Motion Model
A standard target moving in a two-dimensional field for the mobile target node is usually described by its position and velocity in the





4.2. Modified Observation Model
The localization result by (3) is considered as the observation. Here, the localization result is denoted as



If there are no NLOS propagation paths,


4.3. Kalman Filtering
The iterative operations of the Kalman filter can be summarized as follows:

(1) locate the target node with all anchor nodes by (3) (2) RN or SSR to detect the NLOS propagation paths (3) (4) estimate the NLOS range errors with (24) (5) correct the observation with (36) (6) (7) let (8) target tracking with KF with (37)

NLOS identification for target tracking with modified KF.
5. Simulation Results
To track the target node in NLOS environment, we firstly identify the NLOS anchor nodes based on statics model and estimate the NLOS range errors with the method of residual-error decomposition. We derive the covariance of localization result coming from range noises, when the range errors conform to Gaussian distribution. By correcting the observations with the estimated NLOS range errors, the positions of target node would be tracked precisely. Then, the iterative KF algorithm is applied to improve the accuracy of mobile target node position. The simulations firstly demonstrate the two detection approaches for NLOS propagation paths.
5.1. Detection of NLOS Propagation Paths
Residual of node (RN) and sum of square residuals (SSR) are used to judge whether there are NLOS propagation paths or not, when the range errors conform to Gaussian distribution. In (8),
The position of target node is set at (50, 50) and five anchor nodes are deployed in 100 m × 100 m region. All of range errors conform to Gaussian distribution
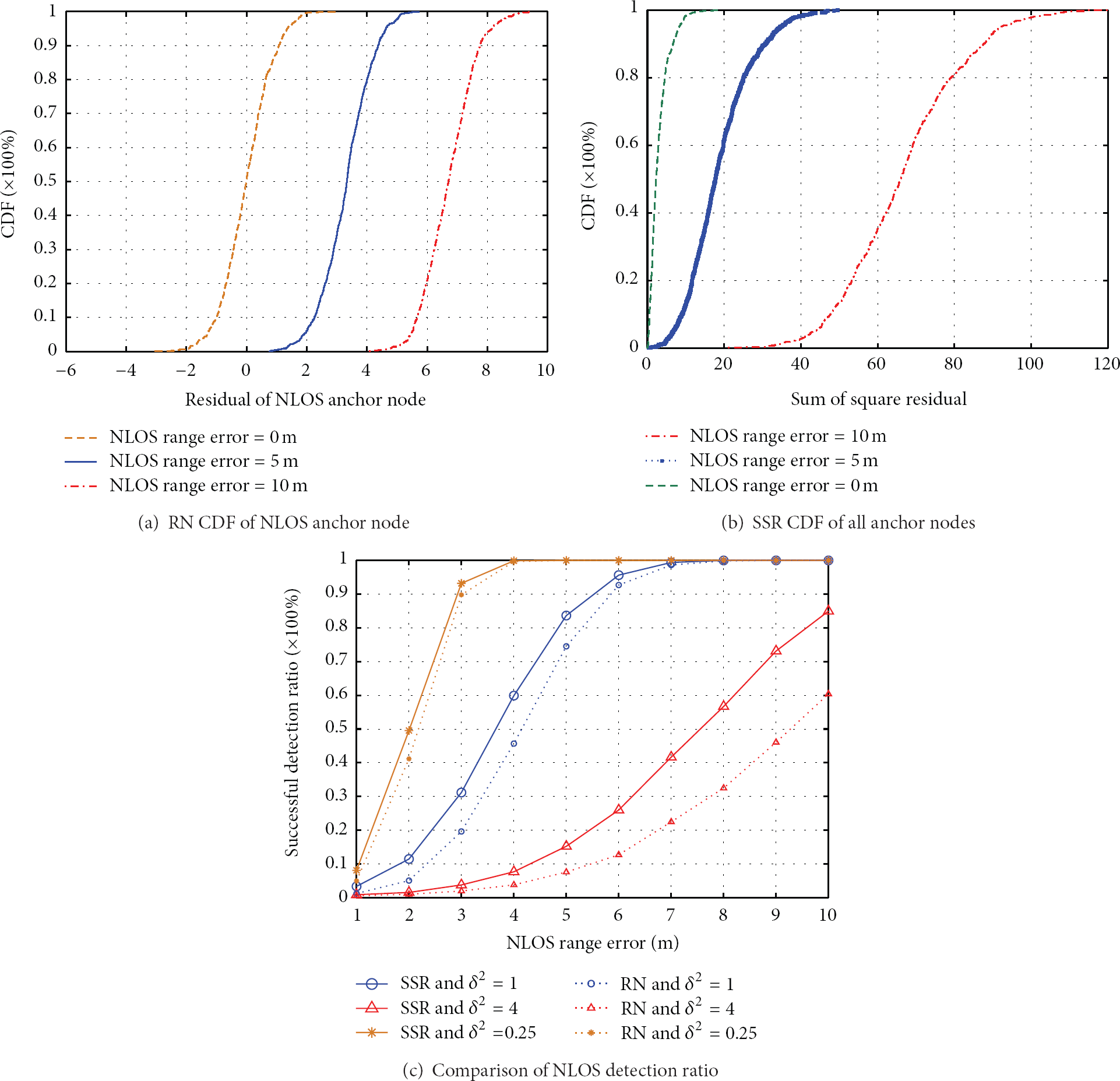
NLOS propagation detection with SSR and RN approaches.
If there is only one NLOS propagation path of all anchor nodes, the sum of square residuals (SSR) will be increased monotonously with the increasing of NLOS range error. The principle of SSR is same as that of RN, since the single NLOS anchor node dominates most residual in all anchor nodes. The SSR CDF of all anchor nodes is plotted in Figure 4(b). When NLOS range error is zero (there are no NLOS propagation paths), only very few SSR are more than 10. If the NLOS range error of the NLOS anchor node is increased to 5 m, most SSR are enlarged and about 40% SSR are more than 20. However, when the NLOS range error is increased to 10 m, the least SSR is 20 m and about 95% SSR are more than 40.
Apparently, the number of NLOS anchor nodes also affects RN and SSR. The simulations show that more NLOS anchor nodes cannot ensure the increasing of RN and SSR. Observed from the matrix
Another concerned problem is the successful detection ratio of NLOS propagation path. We assume that the variances of range error
The curves in Figure 4(c) compare the successful detection ratio of NLOS propagation path with RN and SSR approaches. It can be seen that the successful detection ratio of NLOS propagation path increases with larger NLOS range error and smaller variance of LOS range error. When the NLOS range error is equal to 4 m and
5.2. Estimation of NLOS Range Errors
The RN and SSN approaches can judge whether there are NLOS propagation paths. When the NLOS propagation paths are identified, the residual-error decomposition method is used to estimate the NLOS range errors which correct the observation. Equation (24) illustrates the estimated NLOS range errors with the method of low rank residual-error decomposition. With the estimated NLOS range errors, the NLOS anchor nodes can be identified. The estimation method of residual-error decomposition can estimate multiple NLOS range errors simultaneously. The simulations test the performance of our NLOS range errors estimation method.
Let the geographical region be marked by a 100 m × 100 m region. There are 10 anchor nodes placed randomly in the region, and a target node is placed randomly in the area. Each distance between the target node and each anchor node can be measured. We let the range errors on all links conform to a Gaussian distribution
The curves in Figure 5 plot the relationships between estimated NLOS range errors and true NLOS range errors. When the NLOS range errors of the three NLOS anchor nodes are small, the residuals caused by LOS anchors take most parts in the total residuals, and the estimated NLOS range errors of three NLOS anchor nodes are imprecise enough due to the Gaussian errors of LOS anchor nodes. With the increasing of non-Gaussian NLOS range errors of three NLOS anchor nodes, the residuals caused by non-Gaussian NLOS range errors of three NLOS anchor nodes dominate in the total residuals. Ignoring the impact of LOS anchor nodes, the NLOS range errors of NLOS anchor nodes can be estimated approximately with (24). When the NLOS range errors of three NLOS anchor nodes are set to 10 m, the estimated NLOS range errors of NLOS anchor nodes are close to the true. However, the estimated LOS range error of LOS anchor node is still slightly fluctuated around zero, when the NLOS range errors of three NLOS anchor nodes vary from 1 m to 10 m.
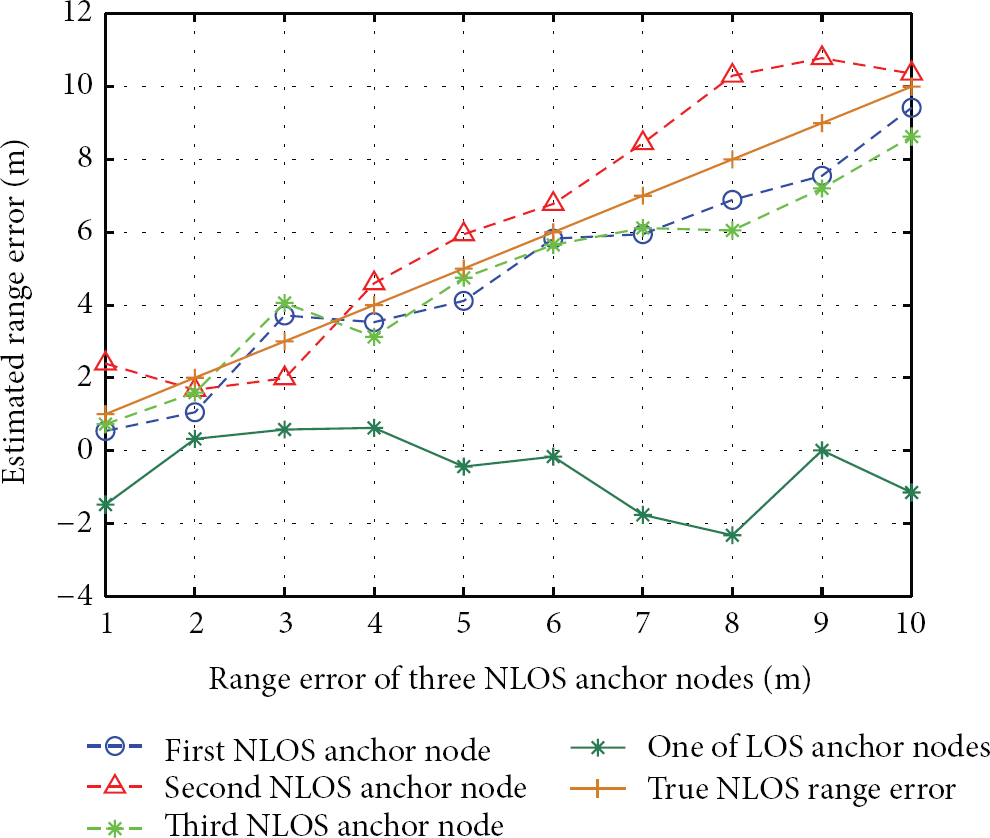
Estimated range errors and true NLOS range errors.
In order to evaluate the accuracy of estimated NLOS range errors to a mobile target node, the NLOS range errors are estimated along the tracking path. In the simulation, six anchor nodes are randomly deployed in a 200 m × 200 m region. Range errors of five LOS anchor nodes conform to Gaussian distribution

The simulation results are plotted in Figure 6. Since the residual of LOS anchor node is also affected by the NLOS range error, the estimated LOS error is close to zero. The estimated NLOS range error is far from the estimated LOS range error and fluctuated with the true slightly.

Estimated NLOS and LOS range error with time instant.
5.3. Tracking with Modified KF
If the movement equation and observation can be represented with the linear functions, the position of mobile target node can be tracked more precisely with KF. The movement equation is simulated as linear one affected by a white Gaussian noise
There are six anchor nodes placed in 200 m × 200 m region, on which a target node is moving at the velocities of 1 m/s, 1 m/s in the direction of axis X and Y. The velocities are affected by the noise acceleration with the covariance of
Assuming that the true location of target node is


Tracking with modified KF in NLOS environments.
The localization result is considered as the observation. Since the modified KF algorithm utilizes the corrected target node position, its position estimation error is much smaller than that of the original KF method. Computer simulations have been conducted to evaluate the tracking performance of the proposed methods by comparing with Cramer-Rao lower bound (CRLB) when the range errors are Gaussian distributed. The curves in Figure 7(b) compare the RMSE of KF algorithm, modified KF algorithm, and CRLB of target node position. Due to the imprecise observation, the RMSE of KF algorithm is much larger than that of modified KF algorithm. The RMSE of modified KF algorithm is almost close to that of CRLB.
6. Conclusion
We have studied the mobile target tracking for wireless sensor networks in NLOS environment and proposed a novel NLOS identification and mitigation method, which are applied to track the mobile target node. Firstly, we provide RN and SSR detection approaches for NLOS propagation path when the range errors conform to Gaussian distribution. The RN and SSR approach are effective to detect the NLOS propagation path when there is only one NLOS anchor node. More than one NLOS propagation paths would make the residuals offset and cannot ensure to detect the NLOS propagation paths successfully. When there are multiple propagation paths simultaneously, selecting the anchor nodes over again and rejudging with RN and SSR can identify the NLOS propagation paths effectively. Apparently, the reselection would improve the performance of the NLOS propagation detection, but it adds the computation costs.
If there are multiple NLOS propagation paths, we propose an estimation method for NLOS range errors with the low rank residual-error decomposition. The method of residual-error decomposition can estimate NLOS range errors quickly even if there are multiple NLOS propagation paths. Since the NLOS range errors are much larger than LOS range errors, the NLOS anchor nodes can be identified with the estimated range errors. Using the estimated NLOS range errors, we correct the localization result and improve the observation. Considering the corrected result as the observation, the position of mobile target node can be tracked precisely. Our approaches to detect and identify the NLOS propagation paths provide a novel idea for tracking the mobile target node for wireless sensor networks.
Footnotes
Acknowledgments
This study is supported by the NSF China Major Program 61190114 and NSF China Program 61174023, Education Department of Zhejiang province Scientific Research Project Y201328700, ZAFU Advanced Research Foundation Project 2010FK045, NSYF China Programs 31300539 and 61303236, Zhejiang provincial Natural Science Foundation LY12F02016, and Zhejiang Province Key Science and Technology Innovation Team 2012R10023-02.