
Abstract
Vehicular communications have been creating new applications in intelligent transportation systems (ITS) areas by converging information and communication technology (ICT) with automobile and road industries. In this paper, we introduce hybrid MAC scheme for vehicular communications which enhances the performance of IEEE 802.11p based communication system. The proposed MAC scheme supports high throughput by combining carrier sensing multiple access/collision avoidance (CSMA/CA) with TDMA. The benefits of proposed schemes are verified by simulations. In addition, we discuss some implementation issues including several application scenarios.
1. Introduction
Vehicular communications have been creating various communication services by combining communication technologies with existing automobile industry. There are two categories of vehicular communications, which are vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) communications. V2V application can build vehicle multihop networking for transmitting safety messages, in which each vehicle detects and transmits emergency messages to neighboring vehicles by multihop communications. V2I application can adopt bidirectional communications for telematics and ITS, where both vehicle and infrastructure can request and receive traffic information or other data such as probe data, toll information, and multimedia data.
By focusing on vehicular safety, standards for V2V and V2I communications have been developed in the 5.9 GHz frequency band, and the representative standard is referred to as wireless access in vehicular environments (WAVE) which consists of IEEE 802.11p for PHY/MAC layers and IEEE 1609 family for higher layers. The core structure of PHY/MAC layers in WAVE standard originates from the orthogonal frequency division multiplexing (OFDM) PHY layer in IEEE 802.11 standard [1]. To support reliable packet transmission in vehicular environments, some modifications have been adopted from wireless local area network (WLAN) technique. The performance of vehicular communication has been analyzed extensively in [2–5]. Recently, V2V-based vehicle ad hoc network (VANET) has attracted much attention for vehicle safety applications by automobile industry because of its standalone vehicle networking benefit without connecting infrastructure network. WAVE technology may be a good candidate for VANET. However, its drawback in terms of packet transmission delay renders the performance of WAVE insufficient in vehicular communications. WAVE adopts CSMA/CA MAC protocol, which has good throughput in the case that the number of nodes is small. However, as the number of nodes increases, the throughput decreases dramatically, which results in long packet transmission delay. To overcome this drawback, we propose hybrid MAC scheme which combines CSMA/CA and TDMA.
The rest of this paper is organized as follows. We first describe the overall system architecture and hybrid MAC scheme in Section 2. In Section 3, the advantages of the proposed scheme are verified with simulations. In Section 4, some application scenarios are discussed with practical issues for implementation. Finally, the conclusion remarks are given in Section 5.
2. System Configuration
We consider the communication systems with vehicles and road side equipment (RSE)s. Each vehicle is equipped with a vehicle terminal and on-board unit (OBU) which consists of modem, MAC, and radio frequency (RF) module. Vehicle terminal displays communication status, vehicle status, and other information such as GPS. Vehicle information can be collected through information gathering device where engine control unit/transmission control unit/microcontrol unit (ECU/TCU/MCU) provides detailed vehicle status. In the road side, an infrastructure has RSE which also has communication module, and RSE is connected to the server and ITS center via backbone network. With above communication system architecture, our system has the following general features and satisfies basic requirements for various safety related applications [6] as we indicated in Table 1.
General features and basic requirements of the communication systems.
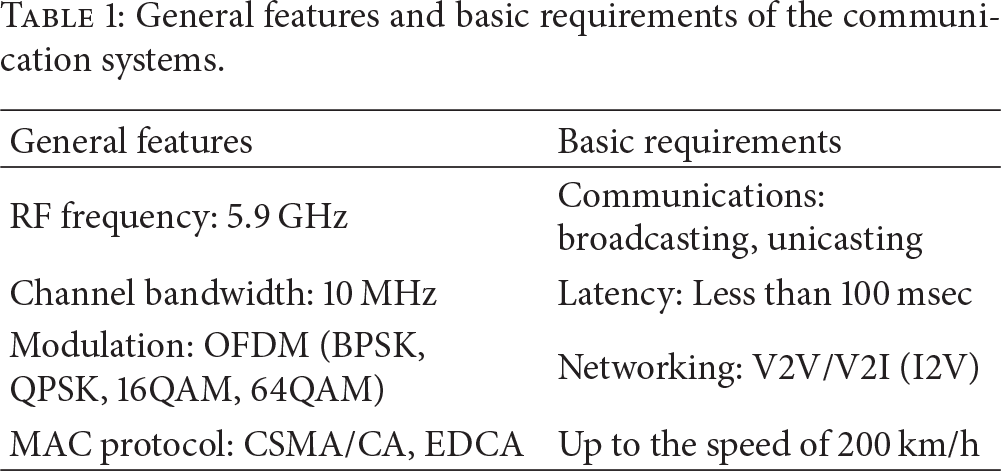
It is worth stressing that the above features satisfy IEEE 802.11p protocol in [7]. In addition to the above features, we propose hybrid MAC with priority control in this paper.
VANET has short lifetime of communication link and dynamic network topology due to the rapid changes of vehicle traffic. The main application areas of vehicular communications are safety services. Most of safety services require point-to-multipoint communication scheme rather than point-to-point communication since safety messages are aimed at general drivers not a specific driver [8]. Therefore, reliable broadcasting plays an important role in safety services. Currently, CSMA/CA-based distributed coordination function (DCF) has been considered for a standard MAC scheme [6, 7]. However, the throughput of this protocol decreases as the number of user increases, as shown in [9, 10]. To diminish this drawback, we propose hybrid MAC which combines TDMA and CSMA/CA.
Figure 1(a) shows the channel structure of the proposed scheme. Unlike CSMA/CA scheme, channel is composed of time frames, and that time frame is composed of time slots where the number of time slots in a time frame can be configured. To manage time frames and time slots, synchronization is needed. In general, GPS can be used for synchronization, where GPS receivers typically provide a precise 1 pulse per second (PPS) UTC signal (with an error less than 100 ns), and these precise 1 PPS signals can be used for timing and synchronization. In WAVE, the guard interval (3 msec) and channel switching time (maximum: 1 msec) are specified for multichannel operation in IEEE Std 1609.4. In addition to this time, DCF of the proposed scheme enable to use GPS in the proposed MAC scheme.
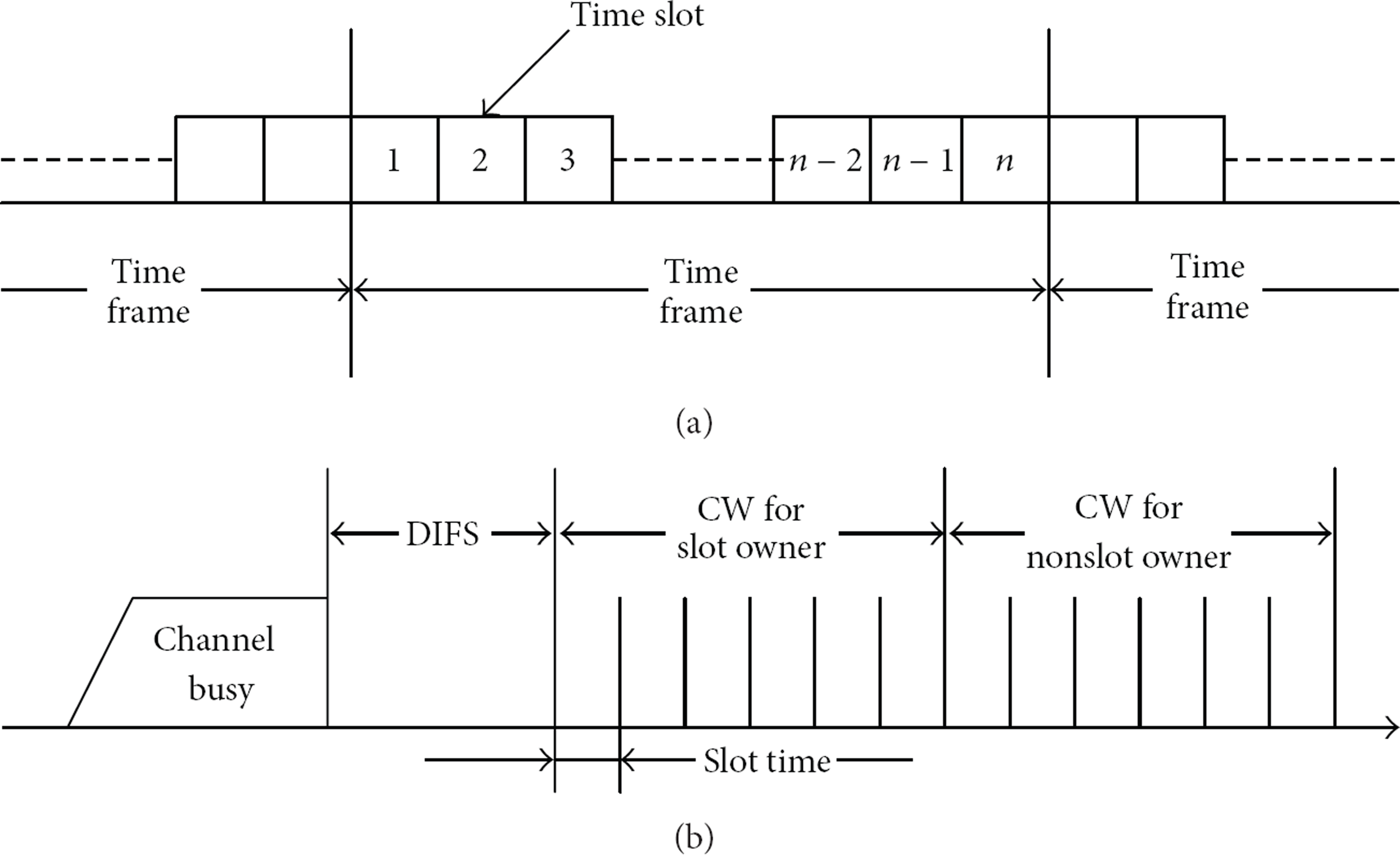
Hybrid MAC. (a) Structure of channel; (b) contention window of the hybrid MAC.
Based on the aforementioned channel structure, every node selects the time slot on which node has ownership and has transmission priority on that time slot at the beginning of each time frame. Then, given the time frame, each node becomes a slot owner and a nonslot owner for the time slot which has been chosen by the selection algorithm and the time slot for the other slots, respectively. The slot owner has transmission priority over nonslot owner. Notice that, in TDMA scheme, each node monopolizes the assigned time slot. However, multiple nodes can be slot owners of the specific time slot in the proposed scheme. In this case, each slot owner competes with the other slot owner using DCF scheme, and the node with the smallest backoff counter transmits the frame. Hence, there is no guarantee that the slot owner must have opportunity to transmit the frame in the time slot selected by node.
Basically, the proposed MAC scheme adopts random back-off process of DCF. The difference is that the proposed scheme adaptively assigns the contention window (CW) based on its slot ownership. Figure 1(b) shows the relationship of CW between the slot owner and the non-slot owner. The proposed MAC scheme uses different CW range for the slot owner and the non-slot owner. The slot owner has smaller CW range than the non-slot owner. Then, the slot owner has priority for frame transmission. As mentioned earlier, multiple slot owners can exist for the specific time slot. In this case, the slot owner that selects the smallest CW value transmits a frame. If the slot owner has no frame to transmit, the non-slot owner obtains the chance of transmit. Therefore, the proposed MAC scheme gives an opportunity to the non-slot owner which compensates a drawback of usability in TDMA. In the proposed MAC scheme, every node should select time slots in each time frame. The time slot selection algorithm must be needed and various manners can be possible. For example, random selection or selection based on network density can be used. In this paper, we use the random selection manner.
3. Simulations
In this section, we present the performance of proposed system with simulations. To evaluate the performance of hybrid MAC, we simulate and compare the throughput of IEEE 802.11 protocol and hybrid MAC using QualNet 4.0. For hybrid MAC, each time frame consists of four time slots, and each time slot has 10 ms of duration. A node is designed to select a time slot randomly, where the time slot has an ownership for each time frame. With this setup, we apply IEEE 802.11a PHY layer with 6 Mbps data rate for simulation. In MAC layer, we use DCF/hybrid MAC, and constant bit rate (CBR) is applied in application layer. For unicast, 20 pairs of unicast flow are considered using 40 nodes, where each pair consists of one source-destination link using two nodes. For broadcast, each node generates a broadcast frame by considering a maximum of 80 nodes. Figure 2 represents network setup for simulations.

Network setup for simulations. (a) Unicast; (b) broadcast.
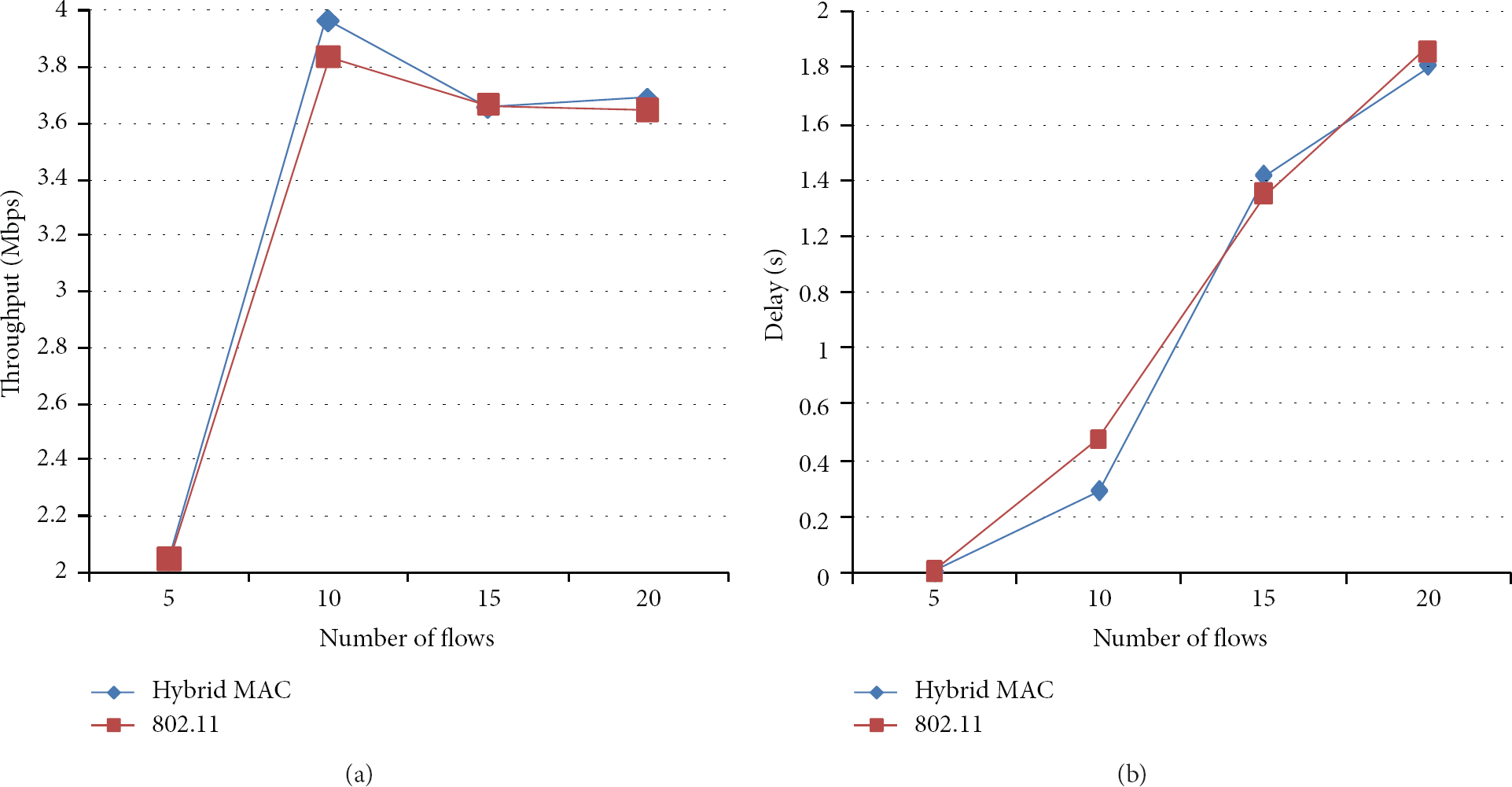
Figure 3 represents throughput and delay of unicast depending on the number of flows. In Figure 3, hybrid MAC shows a little bit better performance than IEEE 802.11 protocol. However, the difference of performance is almost the same as the number of flows increases. Since the retransmission is possible in unicast, there is no big difference in the overall throughput. Figure 4 shows that throughput and delay of unicast depend on the retransmission limit where throughput of hybrid MAC provides better than IEEE 802.11 protocol in general. In IEEE 802.11 protocol, when the transmission of frames failes, the retransmission of the corresponding frame occurs where the number of retransmission can be adjusted. If the number of nodes increases, the probability of collision also increases due to the nature of CSMA/CA, which results in decrement of successful transmission. Thus, throughput of unicast is handled by the retransmission limit, that is, small number of retransmission induces throughput decrement, whereas hybrid MAC distributes the trial number of access to the nodes at the given time by dividing the frame into several time slots; which increases throughput. Hybrid MAC has longer time delay than IEEE 802.11 since delay is dependent on time slot, that is, 4 time slots are equally used regardless of retransmit limit in these simulations, which results in long delay compared with IEEE 802.11 protocol.
Throughput and delay depending on the number of nodes: unicast (a) throughput; (b) delay.

Throughput and delay depending on the number of retransmission: unicast (a) throughput, (b) delay.
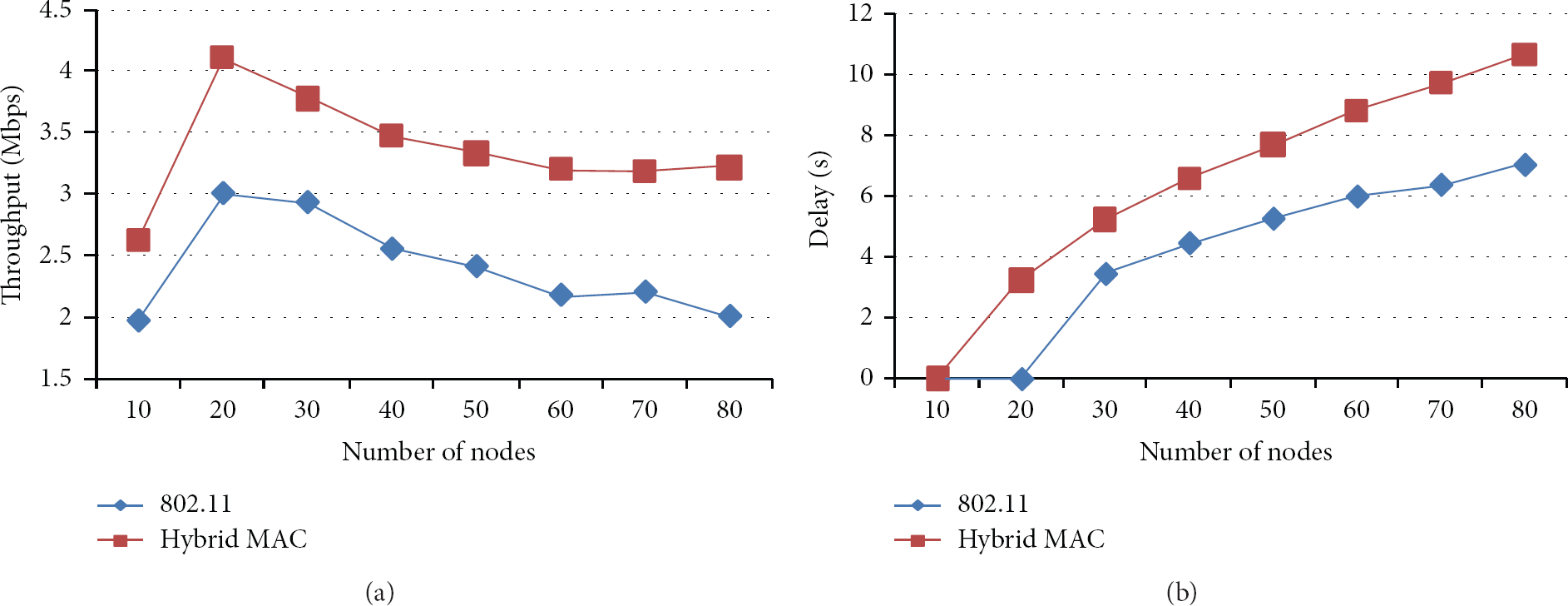
Figure 5 represents throughput and delay of broadcast depending on the number of nodes when each node broadcasts every 100 ms. This scenario is corresponding to situation that every vehicle broadcasts frame periodically for safety services. In this scenario, the number of broadcast frames increases as the number of nodes increases; this results in increment of network density. The figure shows that throughput has a saturation point as the number of nodes increases in IEEE 802.11. This implies failure of transmission increases as the number of collision increases since there in no retransmission in broadcasting. However, in hybrid MAC, the overall network throughput increases linearly as the number of nodes increases. This is due to the decrement of frame collisions since each node transmits frames with different access priority based on slot ownership. Figure 6 shows throughput and delay of broadcast depending on the number of nodes when each node broadcasts every 10 ms. The figure reveals that the network will be saturated as the number of nodes increases and frame transmission rate decreases. From Figures 5 and 6, it is observed that hybrid MAC has superior performance than IEEE 802.11 protocol in broadcast.

Throughput and delay depending on the number of nodes: broadcast, 100 ms periodic transmission (a), throughput (b) delay.
Throughput and delay depending on the number of nodes: broadcast, 10 ms periodic transmission (a) throughput; (b) delay.
In summary, hybrid MAC has better performance than IEEE 802.11 protocol in broadcast, although the performance in unicast is almost the same. However, it is worth stressing that most safety-related applications and information announcement-related applications are required in broadcast. In the final report of VSC project Task 3 [8], it is reported that most of applications uses broadcast.
4. Application Scenarios and Implementation Issues
Until now, we have discussed about advanced technologies for vehicular communication and their advantages. In this section, we will consider some application scenarios including implementation issues.
4.1. Application Scenarios
With V2V communication, we implemented anticollision application by multi-hop communication with very low latency. A safety message such as an accident alarm and vehicle approaching is generated by vehicle, and this message is transmitted to the following/ahead vehicles by multi-hop communication. In the vehicle terminal, the information of my vehicle, front vehicle, and rear vehicle is displayed. When front/rear vehicle approaches to a certain range of my vehicle, the warning message is generated in both vehicles, that is, my vehicle and front/rear vehicle. If the front/rear vehicle moves very close to my vehicle, the very emergency warning is generated. Otherwise, the warning message disappears. This application can prevent or decrease consecutive collisions by informing emergency situation in advance, where this application is developed and under testing in some projects [11–13]. It is worth stressing that the location information is critical in this application since the distance between the vehicles is based on the location. Although reliable communications are guaranteed, this application cannot be realized without accurate location information. We use GPS for deciding location. With GPS, we have seen that error occurs sometimes. To solve this problem, the technique for finding location with very high resolution has to be developed. With V2I communication, we are developing vehicle information-based service (VIS) and intersection safety service (ISS) to seek market-valued key applications. In VIS, vehicle information generated by ECU/TCU/MCU in the vehicle can be delivered to the server/ITS center, and this vehicle information is used for diagnosing and analyzing the vehicle status remotely as well as gathering of traffic information. By providing bidirectional communication, the diagnosed information will be reported to the corresponding vehicle. Then, the driver can monitor the status of vehicle. In ISS, safety messages, that is, vehicle approaching, traffic signal information, pedestrians alerting, and so forth, are broadcasted to the corresponding vehicles by infrastructure. This application will guarantee safety enhancement at the intersection.
4.2. Implementation Issues
In this subsection, we will discuss other technologies which can enhance the system performance. Vehicular communication experiences rapid changes in network topology. Hence, dynamic ad hoc routing has to be considered in VANET. By keeping in mind this fact, the current WAVE will have to be enhanced to meet the three key factors; latency, high mobility, and dynamic VANET.
Besides the proposed MAC scheme, we also have to consider the following technologies: adaptive beam forming in vehicular environments, precise location information in vehicular environments, and non-line-of-sight (NLOS) problem. For adaptive beam forming, we are considering multiple antennas. By applying beam forming algorithm and selecting the specific antenna, the receiver sensitivity can be increased. For example, at the receiver, the initial mode may use multiple antennas. When the receiver tunes to the specific direction, the receiver increases the receiver's gain for the corresponding direction by adjusting antenna pattern. At the transmitter, we may increase the transmitter antenna gain by deciding transmission direction in advance. Thus, the error performance will be improved by supporting high capacity in the network. For various use cases, the location of vehicle will be a critical factor especially in safety-related applications such as V2V anticollision warning, sudden stop warning, and road working warning. Nowadays, GPS is commonly used for finding the location. However, GPS does not provide accurate information and has several meters of error. To address this issue, the technique for finding location with very high resolution has to be adopted by maintaining the cost of location management with appropriate level. The other issue is NLOS problem in vehicular environments. Since 5.9 GHz frequency band is used for vehicular communications, it is hard to support reliable communication links without LOS. In the vehicular environments, there exist many blocking objects such as big trucks and curve areas. To overcome this problem, we may use a relay node at the road or vehicle. A relay node may regenerate the received signal, or simply amplify and forward that signal to another vehicle. Then, the shadowed area and NLOS may be removed which guarantees the reliable communication links.
5. Conclusions and Future Work
In this paper, we investigated a novel MAC scheme for vehicular communications. To improve the performance vehicular communication systems, hybrid MAC protocol is suggested in MAC layer, which supports access priority using time slot and CSMA/CA. Our simulations revealed that hybrid MAC provides better throughput over CSMA/CA by time slot scheduling and priority channel access especially in broadcasting. In addition, we also addressed some practical implementation issues including application scenarios.
In future work, it may be very useful if the proposed scheme is implemented in practical systems since the proposed scheme in this paper only shows simulation results. It is also worth to consider various algorithms in slot owner selection to increase the performance of overall system with the aforementioned implementation issues.