
Abstract
Biological sensors (biosensors, for short) are tiny wireless devices attached or implanted into the body of a human or animal to monitor and detect abnormalities and then relay data to physician or provide therapy on the spot. They are distinguished from conventional sensors by their biologically derived sensing elements and by being temperature constrained. Biosensors generate heat when they transmit their measurements and when they are recharged by electromagnetic energy. The generated heat translates to a temperature increase in the tissues surrounding the biosensors. If the temperature increase exceeds a certain threshold, the tissues might be damaged. In this paper, we discuss the problem of finding an optimal policy for operating a rechargeable biosensor inside a temperature-sensitive environment characterized by a strict maximum temperature increase constraint. This problem can be formulated as a Markov Decision Process (MDP) and solved to obtain the optimal policy which maximizes the average number of samples that can be generated by the biosensor while observing the constraint on the maximum safe temperature level. In order to handle large-size MDP models, it is shown how operating policies can be obtained using Q-learning and heuristics. Numerical and simulation results demonstrating the performance of the different policies are presented.
1. Introduction
Biosensors are tiny wireless devices attached or implanted into the body of a human or animal to monitor and detect abnormalities and then relay data to physician or provide therapy on the spot. Unlike conventional wireless sensors, biosensors are energy as well as temperature constrained. Also, their sensing elements are biological materials such as enzymes and antibodies which are integrated into transducers for producing electrical signals in response to biological reactions and changes. Biosensors are powered by either rechargeable built-in batteries or by continuously sending electric energy to them in the form of electromagnetic waves.
The use of batteries necessitates periodic recharging which can be performed using energy resulting from vibration, motion, light, and heat. However, a more mature approach is to wirelessly collect energy from a Radio Frequency (RF) source and then convert it into usable power. This approach is widely used in the industry to transfer data and power to biosensors. It is also more practical since many biosensors can be recharged simultaneously. In essence, a charging station generates a magnetic field that can convey energy through the skin. From the penetrating magnetic field, an electric voltage is produced by induction in the receiver circuit. The induced voltage is then rectified, filtered, and stabilized to run the biosensors or recharge their batteries.
In this paper, we study a stochastic control problem which arises when a rechargeable biosensor operates in a temperature-sensitive environment like the human body. In this problem, the state of the biosensor is characterized by its current temperature and energy levels, and uncertainty exists due to the random behavior of the wireless channel between the biosensor and base station. The objective is to operate the biosensor in such a way that the average number of samples generated by the biosensor is maximized while the maximum safe temperature level is not exceeded. This control problem can be formulated as an MDP and solved to obtain an optimal operating policy.
Since the size of the MDP model increases with the number of biosensors and their states, Q-learning which is a form of reinforcement learning is used to obtain the optimal policy. The optimal policy is learned by interacting with a simulation model of the system. Another way to handle large MDP models is through the use of heuristic policies. This paper proposes a simple heuristic policy whose performance is sufficiently close to that of the optimal policy. A greedy policy is also proposed and used as a baseline for comparing the performance of the different policies.
The remainder of the paper is organized as follows. In the next section, the necessary background information is given. Then, the limited available literature is reviewed. After that, the model of the system under study is described followed by the presentation of its MDP formulation. Next, it is shown how large-size MDP models can be handled using Q-learning. Besides, greedy and heuristic policies are described. Then, numerical and simulation results are presented and an example is given. Finally, conclusions are summarized and directions for further research are suggested.
2. Calculating the Temperature Increase
Radiation due to wireless communication and recharging are the major sources of heat in biosensor networks. The level of radiation absorbed by the human body when exposed to RF radiation is measured by the Specific Absorption Rate (SAR) which is expressed in units of W/Kg. SAR records the rate at which radiation energy is absorbed per unit mass of tissue [1]. The mathematical relationship between SAR and radiation is given by

SAR is a point quantity. That is, its value varies from one location to another. In this paper, we consider only the SAR in the near field (i.e., the space around the antenna of the biosensor). The extent of the near field is given by

The Pennes bioheat equation [4] is the standard for calculating the temperature increase in the body due to heating. The general form of the equation is

The Finite-Difference Time-Domain (FDTD) method [5] is a technique that transforms the previous bioheat equation to a discrete form with discrete time and space steps. The area under consideration is divided into cells of side δ, and the temperature is evaluated in a grid of points defined at the centers of the cells. Temperatures are computed at equally spaced time instants with a time step equal to
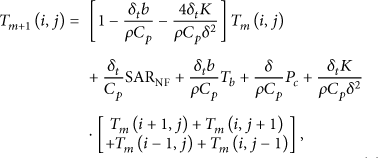
Using (2) and (4), the temperature increase at the location of the biosensor
3. Related Work
The research on the possible biological effects caused by biosensors and how to mitigate those effects is very recent. Most of the existing research deals with other technical issues such as energy efficiency and quality of service. In this section, the limited available literature is briefly reviewed.
Tang et al. [6] were the first to propose rotating the cluster leadership in a cluster-based biosensor network to minimize the heating effects on human tissues. They proposed a genetic algorithm for computing a minimal temperature increase rotation sequence. Since using (4) in computing the temperature increase due to a sequence is computationally expensive, they proposed a scheme for estimating the possible temperature increase due to a sequence.
In another work, Tang et al. [7] addressed the issue of routing in implanted biosensor networks. They proposed a thermal-aware routing protocol that routes the data away from high-temperature areas referred to as hot spots. The location of a biosensor becomes a hot spot if the temperature of the biosensor exceeds a predefined threshold. The proposed protocol achieves a better balance of temperature increase and shows the capability of load balance.
The above two works have motivated us to explore further the bioeffects of implanted biosensor networks. As a result, we noticed a lack of information on how to optimally operate an implanted biosensor network when bounds such as the maximum temperature increase exist. Most of the existing works assume that energy is the only limiting factor in the operation of Wireless Sensor Networks (WSNs). However, this is not the case in biosensor networks where the increase in temperature is a serious limiting factor.
We have approached the problem of how to optimally operate a biosensor network from the perspective of sensor scheduling and activation in conventional wireless sensor networks. Sensor scheduling is concerned with the problem of how to dynamically choose a sensor for communication with the base station. On the other hand, sensor activation is concerned with the problem of when a sensor should be activated. Many interesting works have been done in this regard. Next, these works are briefly reviewed.
In [8], the sensor scheduling problem is formulated as an MDP. The objective is to find an operating policy that maximizes the network lifetime. The state of a sensor is characterized by its current energy level only. Three kinds of channel state information are considered: global, channel statistics, and local. Considering only the energy level at each sensor gives rise to an acyclic (i.e., loop-free) transition graph which enables the MDP model to converge in one iteration. On the other hand, if the temperature of each sensor is included in the model, the transition graph of the underlying MDP becomes cyclic. This is because when the sensor cools down (i.e., its temperature decreases), it transitions back to a less hot state. An MDP model whose transition graph is cyclic needs more time to converge.
Dynamic sensor activation in networks of rechargeable sensors is considered in [9]. The objective is to find an activation policy that maximizes the event detection probability under the constraint of slow rate of recharge of the sensor. The state of the system is characterized by the energy level of the sensor and whether or not an event would occur in the next time slot. The recharge event is random and recharges the sensor with a constant charge. The model does not include the state of the wireless channel which is very crucial when temperature is considered.
Body sensor networks [10] with energy harvesting capabilities are another kind of WSNs in which each sensor has an energy harvesting device that collects energy from ambient sources such as vibration, light, and heat. In this way, the more costly recharging method which uses radiation is avoided. The interaction between the battery recharge process and transmission with different energy levels is studied in [11]. The proposed policies utilize the sensor's knowledge of its current energy level and the state of the processes governing the generation of data and battery recharge to select the appropriate transmission mode for a given state of the network.
4. System Model
Figure 1 shows the system under study where a mobile subject, in this case an animal, has a biosensor implanted into its body. The biosensor has a built-in battery which is recharged by an RF power source. The role of the biosensor is to monitor and report interesting physiological events such as heart rate and blood pressure. The biosensor becomes incapable of detecting and reporting events if it does not have enough energy for transmission under any channel condition or the increase in its temperature exceeds a prespecified threshold. The latter condition causes a halt in system operation to allow the system to cool down.
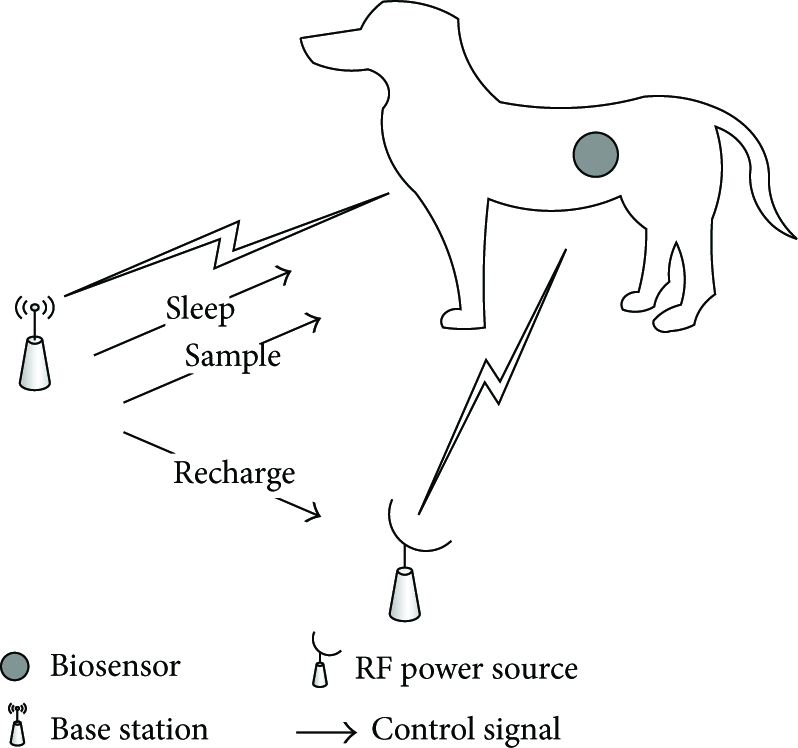
Setup of the system under study.
Both the biosensor and RF power source are under the control of the base station which initiates the measurement process. The base station generates three control signals: Sleep and Sample targeted at the biosensor and Recharge targeted at the RF power source. The system state information is assumed to be available to the base station before it generates a control signal.
Mathematically, the system can be modeled as a discrete-state system which evolves in discrete time. Therefore, the time axis is divided into slots of equal durations
4.1. Biosensor
A biosensor typically contains four essential components: biorecognition, transducer, radio and battery. The biorecognition system is made of elements such as enzymes and antibodies whose role is to produce a physio-chemical change which is detected and measured by the signal transducer. The transducer carries out signal processing tasks. The radio circuitry is responsible for wireless communication. The battery provides power for all active modules in the biosensor and is recharged using RF energy. During a recharging period, the biosensor uses its radio module to collect energy and recharge the battery. Therefore, while its battery is being recharged, the biosensor cannot perform sensing and communication.
The location of a biosensor represents a critical point since it experiences the maximum temperature increase. This is because the tissues surrounding the biosensor might be heated continuously due to the local radiation generated by the biosensor itself and the radiation generated by the base station while recharging the biosensor.
In each time slot t, the state of the biosensor is characterized by two variables which are the current temperature
At the beginning of each time slot, the base station may decide to recharge the biosensor; let it transmit its measurement or put it into sleep. The time required for a full recharge is random since it depends on the current temperature and energy levels. During this time, interesting events may occur but they will not be reported by the biosensor since it is being recharged. Also, the biosensor may be put into sleep for a random amount of time during which no measurements can be produced.
At the beginning of the next time slot (i.e.,


4.2. Wireless Channel
The communication between the biosensor and base station occurs over a Rayleigh fading channel with additive Gaussian noise. Hence, the instantaneous received Signal-to-Noise Ratio (SNR) denoted by γ is exponentially distributed with the following probability density function [12]:

Such a wireless channel can be modeled as a Finite-State Markov Chain (FSMC) [13, 14]. The model can be built as follows. For a wireless channel with K states, the state boundaries (i.e, SNR thresholds) are denoted by
The steady-state probability of the ith state of the FSMC is given by


The above channel model has been verified to be precise when the fading process is slow [13], such as in biosensor applications.
5. MDP Formulation
An MDP is a model of a dynamic system whose behavior varies with time. The elements of an MDP model are the following [16]:
system states, possible actions at each system state, a reward or cost associated with each possible state-action pair, and next state transition probabilities for each possible state-action pair.
The solution of an MDP model (referred to as a policy) gives a rule for choosing an action at each possible system state. If the policy chooses an action at time t depending only on the state of the system at time t, it is referred to as a stationary policy. An optimal stationary policy exists over the class of all policies if every stationary policy gives rise to an irreducible Markov chain. This means that one can limit the attention to the class of stationary policies.
In order to obtain a policy from an MDP model, it is necessary to form and solve the so-called optimality equation (or Bellman's equation). The following is the standard form of this equation with the maximization operator [17]:

5.1. State Set
The state of the system at time t is described by the following 3-dimensional vector:

5.2. Action Set
In each time slot, the base station chooses an action based on the current state of the system. In each state s, there are three possible actions:

The Sleep action can be performed at every system state. The other two actions, however, can only be performed at system states, where the next temperature of the biosensor is within the safe temperature range. In addition, the Sample action can only be performed at system states, where the remaining energy is sufficient to make a successful transmission.
5.3. Reward Function
Since the objective is to maximize the expected number of samples that can be generated by the biosensor, the reward function is defined as

5.4. Transition Probability Function
After the action taken by the base station is performed, the system transits to a new state according to the transition probabilities of the present state of the wireless channel. Thus, the behavior of the system is described by

5.5. Value Function
The problem of finding an optimal policy for maximizing the average number of samples is formulated as an infinite-horizon MDP using the average reward criterion [16]. So, let

The famous value iteration algorithm [17] is used to numerically solve the following recursive equation for

6. Handling Large-Size MDP Models
The size of the proposed MDP model depends on the number of biosensor states which is a function of the number of possible temperature and energy levels. As the number of biosensor states increases, the process of computing the transition probability matrices for the system becomes very time consuming. Also, the value iteration algorithm used for solving the MDP model becomes impractical. This section presents two methods (namely, Q-learning and heuristics) for handling MDP models with a large number of states.
6.1. Q-Learning
Reinforcement Learning (RL) offers an alternative for obtaining the optimal policy at a significantly lower computational cost. Using a simulation model of the system under study, the decision maker in an MDP is viewed as a learning agent whose task is to learn the optimal action in each possible state of the system. As Figure 2 shows, the optimal policy is learned while the system is being driven (i.e., simulated) by the actions selected by the learning agent which stores the results of its actions in a knowledge base. The actions of the decision maker become better over time as new knowledge is obtained. Eventually, the RL algorithm converges to an optimal policy which can be used in the physical system.
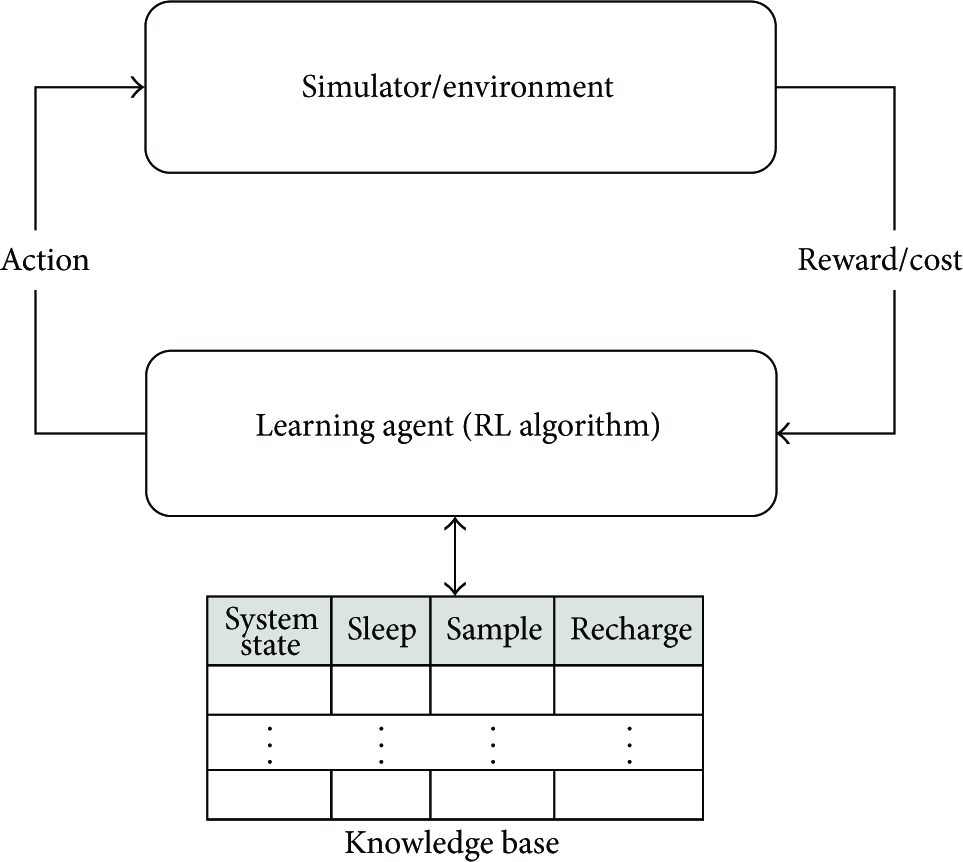
Using an RL algorithm (like Q-learning), the decision-making agent gradually learns the optimal policy. An action is applied to the system or simulated and then the resulting reward/cost is fed back into the knowledge base of the decision maker. The new knowledge obtained over time helps the decision maker to make better actions.
Q-Learning is an RL algorithm which was introduced in [18]. It is used for learning from experience. It requires that each entry in the decision-maker's knowledge base corresponds to a state-action pair. The value stored in each entry is referred to as the Q-value and is a measure of the goodness of executing an action in a particular system state. The Q-value for a state-action pair

The Q-learning algorithm is shown as Algorithm 1. The interaction between the learning agent and the simulator (or environment) is divided into episodes. In each episode, the system transits through a sequence of states. The length of this sequence is controlled by the parameter
Although Q-learning is theoretically guaranteed to obtain an optimal policy, it requires that each state-action pair be tried infinitely often in order to learn the optimal policy. The quality of the learned policy depends on how much time is spent in learning and if every state-action pair can be tried. On the other hand, depending on the application, a certain percental difference between the learned and optimal policies might be tolerated. This is because the system states differ in the likelihood of being visited. Thus, a default action (like Sleep) can be assigned to system states with a low likelihood of being visited.
6.2. Heuristic
Since it is difficult to describe the structure of the optimal policy, a heuristic policy is proposed in this section. The goal is to design a policy which mimics the behavior of the optimal policy as close as possible. However, before presenting such a policy, a greedy one is given to provide insight into the design of any heuristic policy.
The greedy policy is computed using Algorithm 2. The inputs to this algorithm are the set of possible system states and the set of feasible actions for each system state. The computed policy is greedy in the sense that for each system state, the feasibility of actions is checked in the following order: Sample, Recharge, and then Sleep. The first feasible action is associated with the corresponding system state.
S: Set of possible systemstates each system state Policy(i) = Sample Policy(i) = Recharge Policy(i) = Sleep
As will be shown by simulations in the next section, the greedy policy is poor since it is based on a fixed order of actions. Therefore, Algorithm 2 needs to be extended to allow for a dynamic selection of actions. This objective is accomplished by introducing two control parameters: α and β. With these two control parameters, the Sample and Recharge actions are not selected in a specific order or whenever they are feasible. Algorithm 3 shows how the control parameters and new heuristic policy are computed.
S: Set of possible system states each system state
Policy (i) = Sample Policy (i) = Recharge
Policy (i) = Sleep
The essence of Algorithm 3 is as follows. If the current temperature (denoted by T) of the biosensor is low and its current energy level (denoted by E) is high, then the condition
7. Numerical and Simulation Results
In this section, an example is first presented to illustrate the viability of the proposed MDP model. Then, the performance of the optimal policy is compared to that of the approximate policies using simulation. The impact of various system parameters on the performance of the system is also evaluated. The simulation was performed using a simulator written in Matlab [19]. Each simulation was run for a duration of 100000 time slots, and each data point is the average of 10 simulation runs. The number of channel states (W) is four, and the channel state boundaries are randomly generated.
7.1. Illustrative Example
In this example, a wireless channel with two states is considered. The channel state transition probabilities are calculated using (9). Table 1 shows the values of the parameters involved. Figures 3(a) and 3(b) show the expected number of samples when there is no recharge and when recharge is allowed, respectively. The expected number of samples is expressed as a function of the maximum safe temperature level (τ) and initial energy (
Values assigned to the parameters of the example and Q-learning algorithm.
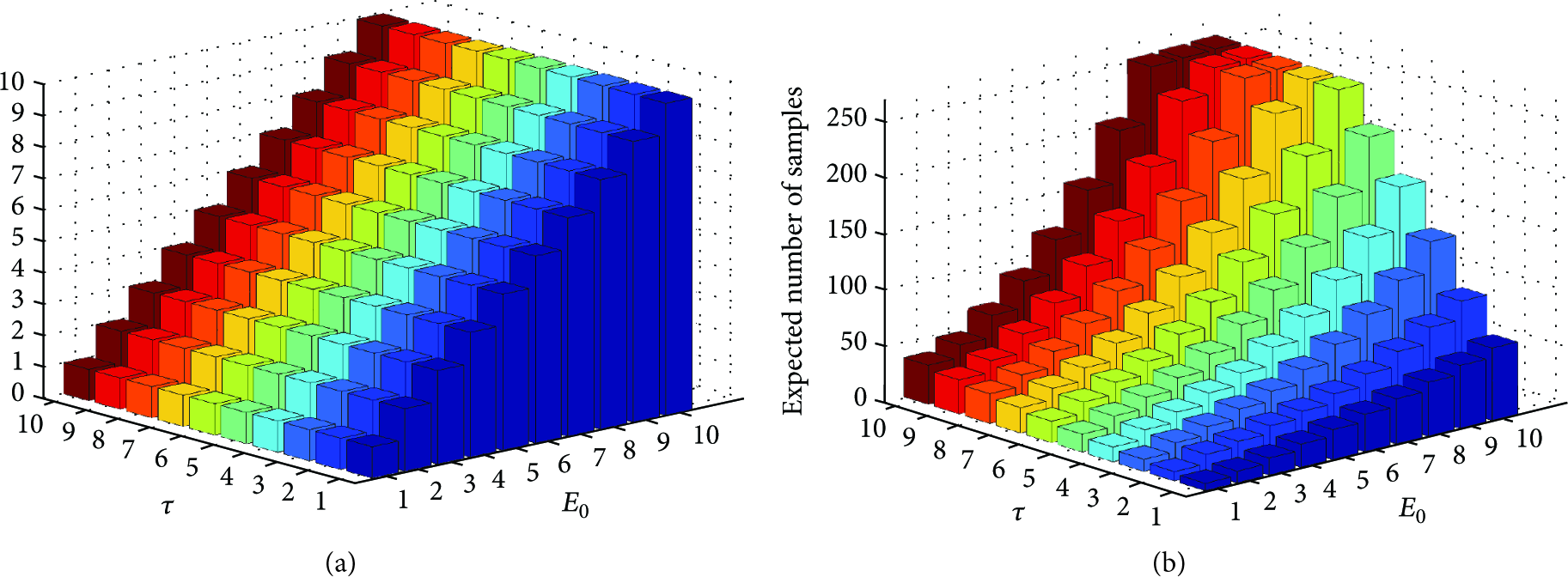
Expected number of samples. (a) No recharge. (b) With recharge.
When recharge is allowed, the maximum safe temperature level (τ) plays a critical role. This is due to the temperature increase caused by the recharge action. In Figure 3(b), for the same initial energy, the expected number of samples increases as τ is varied. Increasing τ enables the Recharge action to be performed more often. On the other hand, as one would expect, if τ is fixed and (
Figures 4(a) and 4(b) show the optimal action for each possible system state. In Figure 4(a), for channel state 1, the Sample action is performed in

Optimal policy for τ = 5 and
By contrast, in Figure 4(b), for channel state 2, the Sample action is performed only once at the initial system state. For this channel state, due to the higher cost of transmission, the biosensor is put in the sleep mode most of the time. However, since the cost of the Recharge action is independent of the channel state, the system recharges itself more often to enable more samples to be generated when the wireless channel switches to a state with a lesser transmission energy requirement (i.e., channel state 1).
7.2. Comparative Analysis
In order to be able to appreciate the merit of any approximate policy, a more meaningful performance criterion is needed. In this work, the average number of time slots needed to generate a sample is used as a criterion to distinguish between the different policies available to run a system. It is calculated as the total simulation time divided by the average number of samples generated by the system while being operated by a certain policy. This measure takes into account the effect of the Recharge and Sleep actions.
For example, consider Figure 5. In this figure, τ is fixed at five while

Average number of time slots needed to generate a sample when τ is fixed at five and
Figure 6 shows the amount of time required to generate a sample when
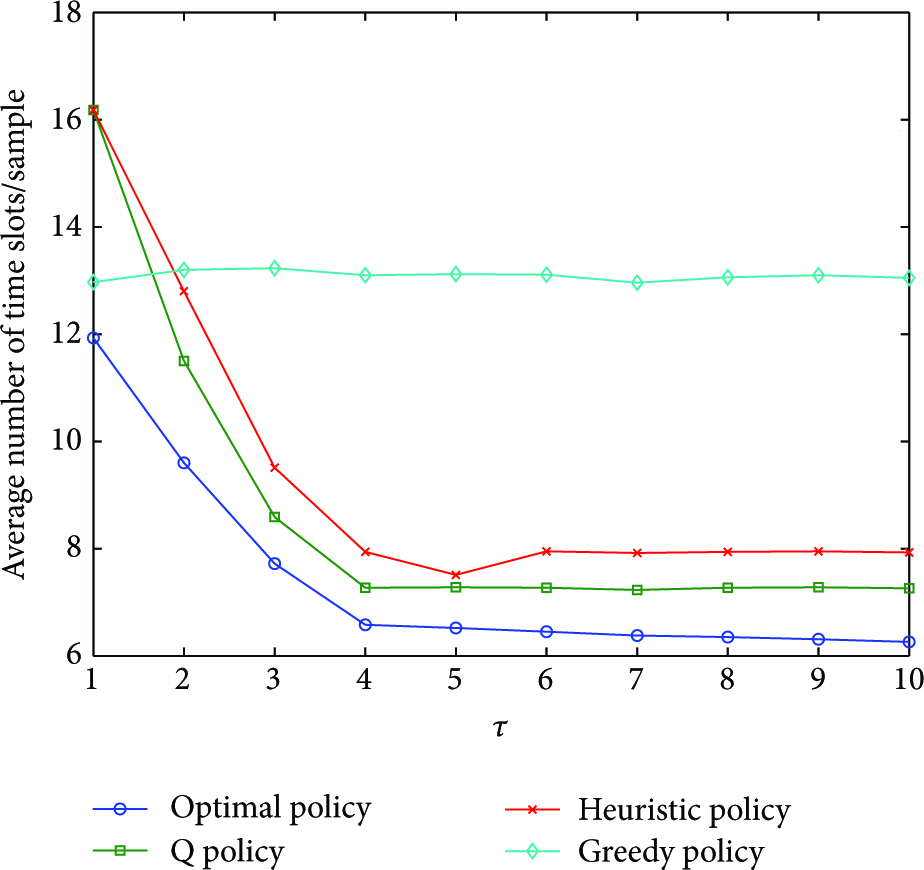
Average number of time slots needed to generate a sample when
8. Conclusions
The increase in temperature due to the heat generated by biosensors is a limiting factor in the operation of biosensor networks. This problem can be modeled as a stochastic control problem using the framework of Markov decision processes. The solution is an optimal policy which ensures that the maximum safe temperature level is not exceeded. In order to handle large-size MDP models, it is shown how Q-learning can be used for obtaining the optimal policy. In addition, a heuristic policy is proposed. Its performance is comparable to that of the policies obtained by the MDP model and Q-learning.
This work can be extended in the following directions. First, the scenario of more than one rechargeable biosensor should be studied. In this case, the number of possible system states is exponentially huge. Thus, techniques for eliminating equivalent states would be necessary. Second, the performance of other reinforcement learning techniques should be investigated, especially for models with a huge state space. Third, algorithms for computing better heuristic policies should be developed to mitigate the problem of finding better approximate policies.
Footnotes
Acknowledgment
The first author would like to acknowledge the financial support of King Fahd University of Petroleum and Minerals (KFUPM) while conducting this research.