
Abstract
End devices in beacon-enabled IEEE 802.15.4 network rely on passive scan to find the coordinator for association. The latency of coordinator discovery depends on coordinator's beacon interval length. If beacon interval is long then more time is required for successful discovery and vice versa. The latency of association message exchange in IEEE 802.15.4 is considerably high due to response wait time. It is the time during which the coordinator registers the device and assigns a network address. The overall time required for successful discovery and association is inadequate to support connectivity of mobile devices in short range IEEE 802.15.4 networks. To decrease this time, we propose a coordinator assisted passive discovery and association scheme for mobile end devices in IEEE 802.15.4 networks. The proposed scheme decreases the beacon interval of the coordinators that are close to mobile devices for prompt neighboring coordinator(s) discovery. Also, it eliminates the need for response wait time during association based on early registration mechanism. Simulation analysis shows that the proposed scheme ensures fast passive discovery and association with the coordinator, irrespective of beacon interval length.
1. Introduction
IEEE 802.15.4 based wireless networking solutions have emerged as the most popular choice for monitoring and control oriented sensory applications. These low-duty cycle and cost-effective networks can provide low data rates, security, limited mobility support, and reliable operation with minimum energy consumption. As a result, IEEE 802.15.4 reasonably meets many short-range wireless personal area network (WPAN) requirements for a number of applications, including environmental monitoring, healthcare, security, smart homes, and asset management.
For example, in smart environments such as hospital buildings, rooms can be equipped with a number of sensors for patient health monitoring and environmental control. Sensor nodes can be installed on patients for monitoring temperature, blood pressure, ECG, SpO2, and so forth, while other devices can be located within the room for environment monitoring using ambient temperature, light, and smoke sensors. In this application scenario, providing continuous connectivity to mobile end devices transmitting critical health information is very important.
IEEE 802.15.4 node association defines the procedure of how nodes can become members of personal area network (PAN). In beacon-enabled network, end devices use passive scanning first to discover coordinator(s) and then join to them using association messages. The latency of passive scanning depends on beacon order (BO) of the coordinator that determines the beacon interval length. The longer is the beacon interval, the higher is the latency of coordinator discovery, as nodes receive beacons after longer intervals. Energy conservation is one of the basic design constraints in IEEE 802.15.4. Therefore, it provides a flexible mechanism for adjusting the duty cycle of nodes by using BO and superframe order (SO). According to the standard, selection of these metrics depends upon application's requirement. Manual tuning is generally used; however, this is a time-consuming deployment process [1]. Also, a number of algorithms [2, 3] have been proposed to dynamically adjust the required values for achieving balance between transmission latency and energy consumption. As a result, coordinators within the same network can have different beacon intervals. Hence, predicting passive discovery delays and success for mobile end devices becomes very difficult during cell changes. After successful discovery of the coordinator, an end device requests association with the discovered coordinator using association messages. During this message exchange, the end device has to wait for the coordinator's response more than normal round trip time. This is because of processing delay required for allocation of network address to the requesting device. This considerably increases the overall time required for completing association procedure. During the complete discovery and association, the end device cannot receive or transmit application data, resulting in substantial delay and loss of sensed data.
In existing literature, the issue of coordinator discovery and association by using passive scan has not been studied in detail. In this paper, we investigate this issue for mobile end nodes which have to perform frequent discovery and associations due to cell changes. We propose a coordinator assisted passive discovery and association (CADA) scheme for mobile end devices. It aims to provide quick discovery of coordinators and reduces association time during cell change. Parent coordinator of end devices uses link quality indicator (LQI) to speculate the mobility of member nodes. In case of movement, the parent coordinator communicates with neighboring coordinator(s) to decrease their beacon intervals, thus assisting moving device in swift passive discovery. The association time is decreased by allocating temporary network address to possible incoming mobile device by the neighboring coordinators. This helps eliminating the need for response wait time at end devices during association message exchange. Simulation analysis shows that by and large CADA significantly decreases the discovery and association time in IEEE 802.15.4 network.
This paper is organized as follows. Section 2 outlines existing research efforts on coordinator discovery and association in WPANs. Discovery and association mechanism of IEEE 802.15.4 are discussed in Section 3. Sections 4 and 5 present the network model and operation of the proposed scheme, respectively. Simulation results are analyzed in Section 6, whereas the last section concludes the paper.
2. Related Works
This section briefly outlines the existing association and passive discovery schemes. Association issues in IEEE 802.15.4 have been studied mostly for mobility management [4, 5]. Node mobility degrades the performance of IEEE 802.15.4 based WPANs [6, 7]. Also, mobility is highly dependent on network topology; network performance decreases with the number of mobile nodes or when nodes are moving fast. At higher speeds, nodes continuously lose their connectivity and fail to associate with coordinators [6].
The mobility management scheme for cluster-tree-based WPANs that was presented in [5] uses speculative algorithm for node association based on LQI. Mobile nodes use this value to anticipate cell change before the loss of connection and try to associate with the next coordinator. In this work, however, nodes use active scanning to find neighboring coordinators. On the other hand, collaborative node association is presented in [8]. This approach uses device tables at coordinators to cache location information of the mobile sensors. When sensors move from one router to another, two neighboring routers cooperate to accomplish association procedure. This work assumes that both collaborating coordinators are within each other's coverage area. In [4], a method for increasing sensor node connectivity time in IEEE 802.15.4 beacon-enabled mode is presented. In order to select the most appropriate coordinator, the mobile node uses time stamp and signal strength of the received beacons during the scan procedure. Nevertheless, this scheme does not suggest any modifications for decreasing the overall association time. In [9], different link quality based schemes have been proposed as an extension to IEEE 802.15.4 association mechanism for ad hoc node association in predetermined Zigbee devices. Their network model, however, does not consider mobile nodes. In [10], a seamless coordinator switching (SCS) scheme for WPAN was introduced. In this scheme, each Pico-net coordinator (PNC) before leaving the responsibility of coordinator assigns another node for this purpose. The SCS scheme, however, only addresses the issue of coordinator's mobility and offers no solution for end device mobility.
Fast association mechanism in [11] addresses the issue of coordinator discovery during the association process which has been proposed for real-time applications. The delay caused by scanning multiple channels is reduced because the scanning process is terminated as soon as the beacon is received. Therefore, if nodes perform fast association, they do not wait for the whole channel scanning time. In [12], the assessment of passive discovery in IEEE 802.15.4 Body Area Sensor Networks for targeted and untargeted scenarios is presented. In targeted discovery, nodes find one specific and preconfigured coordinator, whereas they search for any coordinator in the untargeted case. The work concludes that for targeted discovery, increasing the success rate of passive discovery significantly increases the cost of discovery. For untargeted scenario, it is preferable to stay longer on one channel, and if BO is higher, coordinators are only rarely discovered. In [13], asynchronous neighbor discovery and rendezvous protocol have been presented. Nodes select a pair of prime numbers, so that the sum of reciprocals is equal to the desired duty cycle. Then, nodes turn their radio on and start to communicate whenever a node-local counter is divisible by either of the prime number. This adaption of the Chinese Remainder Theorem ensures the discovery within the bounded time. However, their work [13] has not been proposed for IEEE 802.15.4 network.
Our previous work on coordinator discovery using passive scan, based on LQI, has been presented in [14]. This paper not only presents coordinator discovery but also coordinator assisted early node registration that decreases the overall association latency. Moreover, in this work, a thorough performance analysis of the whole mechanism is carried out for both, organized and random network topologies.
3. IEEE 802.15.4
In this section, we briefly discuss IEEE 802.15.4 protocol, including beacon-enabled mode and node association procedure. A basic low rate wireless personal area network (LR-WPAN) conforming to IEEE 802.15.4 is established and maintained by a device called PAN coordinator. Besides the PAN coordinator, the network consists of full-function devices (FFD) and reduced-function devices (RFD). The former supports all network functionality, whereas the later only supports a reduced set of functionality.
Within the PAN, nodes are organized to form either star or peer-to-peer topology. The peer-to-peer topology potentially allows the formation of more complex topologies like clustered tree. It can be used in applications where relatively large network is required. The MAC layer of IEEE 802.15.4 defines two modes of channel access: synchronized beacon enabled and random beacon less. In this paper, we consider node association in beacon-enabled cluster-tree WPAN. Therefore, in the remaining of this section, we explain the beacon-enabled mode and node association process of IEEE 802.15.4.
3.1. Beacon-Enabled IEEE 802.15.4
MAC layer is responsible for beacon management, channel access, GTS management, frame validation, acknowledged frame delivery, association, and disassociation. In beacon mode, all coordinators within the network transmit synchronization frames (beacon frames) to their associated devices. The beacon contains information related to PAN identification, synchronization, and superframe structure.
The period between two consecutive beacons is defined by a superframe structure which is divided in 16 slots. The first slot is used for beacon transmission, whereas the rest of the superframe duration consists of contention aware period (CAP), contention free period (CFP), and inactive period. The CAP and CFP durations are also referred as active period. All data transmissions between the coordinator and its associated device occur in this active period. The superframe structure of IEEE 802.15.4 is shown in Figure 1. The structure of superframe is defined by BO and SO. SO is used to determine the length of superframe duration or active portion of superframe, whereas the time between successive beacons or beacon interval is determined by BO. The relationship between BO and SO can be expressed as
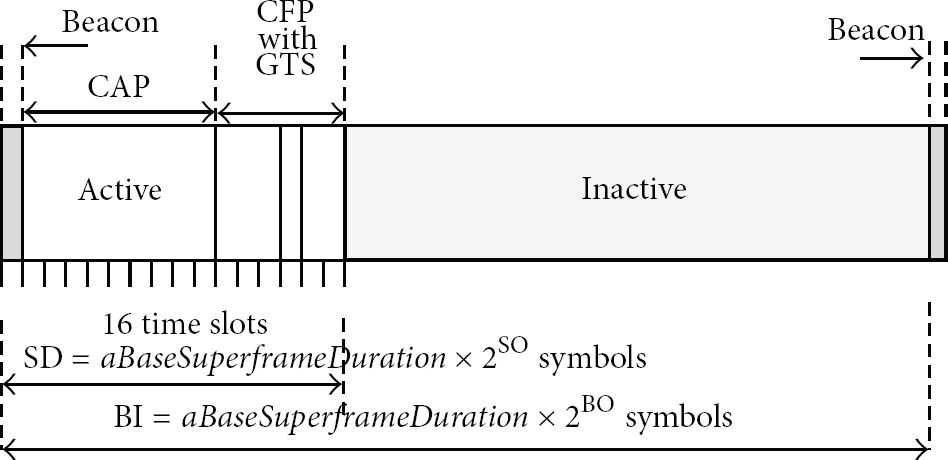
Superframe structure of IEEE 802.15.4.
3.2. Coordinator Discovery and Association in IEEE 802.15.4
Node association procedure in 802.15.4 is triggered by the upper layer(s). In order to start association, an end device needs to know the PAN's physical channel, coordinator ID, addressing mode, and PAN ID. In beacon-enabled and beaconless IEEE 802.15.4 networks, end devices discover coordinator(s) using passive and active scan, respectively. In passive scan, nodes only listen to the medium for beacons, whereas in active scan, explicit beacon request command is broadcasted to find coordinator(s). After receiving beacon(s), the association with respective coordinator is started. This procedure is shown in Figure 2. It comprises of association request, ACK from coordinator, data request followed by ACK, and final association response by the coordinator. During the association procedure, devices are allocated 16 bit short device address by the coordinator. The overall association latency can be calculated by using (1).


Node association in IEEE 802.15.4.
Response wait time is the maximum number of symbols (32 × a BaseSuperframeDuration) the device shall wait for a response command to be available following the request command. It accounts for the processing and address allocation delay required at the coordinator. If the mobile device moves away from parent coordinator, the absence of coordinator is detected after beacon loss reaches a threshold. This triggers an orphan scan for reassociation with the same coordinator. If re-association is not successful, passive scan is used to discover a new coordinator.
The associations in IEEE 802.15.4 is established and maintained by devices based on LQI and is defined as an integer from 0 to 255. The calculation of the LQI is not specified in the standard. Also, no association metric for the selection of LQI has been standardized, but IEEE 802.15.4 specifies that the measurement can be implemented using receiver energy detection (ED), signal-to-noise ratio (SNR) estimation, or combination thereof.
4. Network Model
In this section, network entities, definitions, and assumptions are explained. We consider a beacon-enabled, cluster-tree-based WPAN. PAN coordinator and cluster heads are assumed to be static, whereas end devices such as RFDs can be mobile. Low mobility is considered with random movement of end devices. It is assumed that coordinators within the network are dynamically adjusting their beacon intervals for decreasing the duty cycle of PAN devices, using any BO adaption algorithm [2, 3].
The basic network design comprises a clustered-tree network as shown in Figure 3. Node 0 is the PAN coordinator. Nodes 1, 2, 3, 4, and 5 are cluster heads. The rest of the nodes are end devices attached to the cluster heads. A cluster is a small section of the bigger network, which has its own FFD acting as a coordinator or cluster head. The large circles correspond to the coverage (radio range) of cluster heads 3, 4, and 5. Node 6 moves from location

Network model for cluster-tree topology.
In order to observe the change in LQI with respect to distance, mobility, and background traffic, we conducted a simple experiment in Ns-2 [16]. Initially, the coordinator and the end device are positioned close to each other (1 m). Then, the end device starts moving away from the coordinator at a speed of 1 m/s. Radio range of both devices is 10 meters. The effect of interference is also accounted by introducing background traffic. LQI values calculated at the coordinator from the communication with end device are shown in Figure 4. In case of no background traffic, high LQI values are obtained when the device is stationary and close to the coordinator. With movement some false LQI values are observed, and the LQI drops as the end device exits coverage area of the coordinator. LQI is also affected by the background traffic because of interference and, especially, when the node is moving, where sudden drops in LQI values are observed. In [4], authors obtained similar results; however, they did not take background traffic into consideration. CADA uses normalized value of LQI to detect node movement, as explained in the next section.

Change in LQI with distance and background traffic.
5. Operation of CADA
CADA operation flow consists of two phases: passive coordinator discovery and association. In the former phase, coordinators speculatively attempt to find any mobile node moving away from their cluster by using LQI and communicate with their neighboring coordinators. In the later phase, mobile devices use modified message exchange sequence of IEEE 802.15.4 to reduce the overall association time with the new coordinator. Later in this section, we discuss these two CADA phases in detail.
5.1. Passive Coordinator Discovery Phase
In WPANs, the coordinator uses a member table to store associated end device's 64 bit address, 16 bit short address, and capability information as shown in Table 1. CADA adds three additional fields LQI_PREV, LQI_TIME, and LQI_COUNTER in this table to detect node's mobility. LQI_PREV is the LQI value of last received packet from the member node. LQI_TIME is the time of last LQI reading, and LQI_COUNTER is the counter to detect continuous decrease in link LQI values from the member node.
Coordinator's member table.

The algorithm for link quality based mobile node movement detection is shown in Algorithm 1. The objective of this algorithm is to detect whether a node has moved away from the coordinator within the time slot
(1) IF (LQI_PREV not expired) OR (LQI_CURR ≥ LQI_PREV) OR (LQI_CURR > LQI_THRESHOLD) LQI_COUNTER = 0 ELSE LQI_COUNTER ++ (2) LQI_PREV = LQI_CURR (3) LQI_PREV_TIME = LQI RECORD TIME (4) IF (LQI_COUNTER == WAIT_LIMIT) Broadcast AAR command LQI_COUNTER = 0
The AAR message has two objectives: decreasing the BO of neighboring coordinators and early registration of the prospective end device at neighboring coordination. If an active end device is about to leave the cell, the coordinator broadcasts this message based on CADA algorithm. The command message instructs the neighboring coordinator(s) to decrease their beacon interval to the ideal beacon order (IBO). The IBO value is defined by the application depending on its data rate. Since coordinators can dynamically adopt BO, the neighboring coordinators can have BO value greater than IBO. AAR message is an extra message not available in the IEEE 802.15.4 discovery or association procedures. The frequency of this message is dependent on the speed and number of mobile nodes in the network.
The coordinator receiving AAR message from its neighbor can decrease its BO immediately or after expiration of current beacon interval. If BO is immediately decreased, the member nodes can lose synchronization with coordinator. On the other hand, decreasing BO after the completion of current beacon interval can considerably increase the passive discovery time, if current BO is too high. Therefore, in CADA, coordinators issue temporary beacons after receiving AAR message. The length of temporary beacon interval (TBI) corresponds to IBO. These beacons are only used by nonmember nodes for new associations. TBI length is an offset of the remaining time in the current beacon interval. Consider 
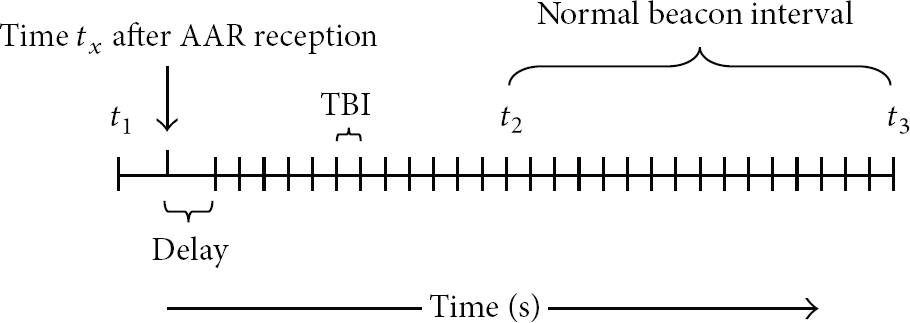
Synchronization of beacon transmissions after AAR reception.
The temporary beacon transmission is only started if BO is greater than IBO at the time of AAR reception. These beacons are issued until association request from the new device is received, or association request wait timer (AWT) expires. AWT is the waiting time for new mobile nodes to send association request. If no new device is detected until AWT is expired, temporary beacons are stopped. In case of multiple mobile node, AWT is always maintained for the latest received AAR message.
5.2. Association Phase
Association messages transmitted by devices in CADA are shown in Figure 6. AAR message broadcasted by the parent coordinator contains 64 bit mobile device's address for early registration. This allows the neighboring coordinator(s) to register the device as a cell member and to allocate temporary PAN address to the prospective incoming mobile device. This is achieved at the coordinator by sending MLME-association indication to the higher layer which is responsible for address allocation. Once the address is allocated, the neighboring coordinator(s) starts the AWT timer and start broadcasting temporary beacons (as discussed in the previous section). If association request from the same mobile device is received before the AWT is expired, then further association messages are exchanged like in IEEE 802.15.4 as shown in Figure 2. The neighboring coordinator allocates network address to the prospective mobile device before entering in its cell. Therefore, unlike IEEE 802.15.4, the mobile device does not need to wait for response wait-time during association message exchange of CADA. In fact, the association procedure of CADA shifts this waiting delay from the end device's side to the coordinator's side. The reason for removing this procedure from the association message exchange is that it is the most time consuming part during the message exchange between devices. Thus, the association latency at the mobile end device is decreased considerably as expressed in


Mobile node association in CADA.
6. Simulation Results
In this section, detailed performance evaluation of CADA is discussed based on simulation analysis and comparison with IEEE 802.15.4. Both mechanisms are evaluated for throughput, association time, association success rate, and energy consumption. The simulation analysis is performed using network simulator Ns-2 [16].
6.1. Simulation Setup
In order to thoroughly evaluate the performance of CADA and IEEE 802.15.4, simulations were conducted for both organized and random topologies. Node arrangements used in different simulations are shown in Figure 7. The organized node arrangement in Figure 7(b) represents a building floor where nodes are arranged in rooms and corridors as shown in Figure 7(a). Coordinators within each room can communicate with their neighboring coordinators, but interroom communication is not possible because of walls. In this scenario, node 0 is the PAN coordinator, and the remaining nodes are coordinators, whereas node 66 is the mobile end device. In Figures 7(c), 7(d), and 7(e), random node arrangements are shown with 25, 50, and 100 coordinators in 50 × 50 m area, respectively. Moreover, in random arrangement, three different mobility patterns are used by the mobile end device in every scenario, and averaged results are presented in this work. The movement patterns are shown by arrow heads in Figures 7(c), 7(d), and 7(e). Simulations for all scenarios are conducted at end node speeds of 0.5 m/s and 1 m/s. The mobile node continuously moves while transmitting data to the PAN coordinator. Data are collected after network is established, and all coordinators are successfully transmitting their beacons. In random topology, data reporting period is 250 s and 500 s at 1 m/s and 0.5 m/s, respectively. On the other hand, in organized topology, simulation was conducted for 600 s and 1200 s at 1 m/s and 0.5 m/s, to complete the movement path as shown in Figure 7(a). In all simulations, SO is same as BO. Network parameters are listed in Table 2. Minimum LQI_THRESHOLD in CADA is 150, after which the coordinators broadcast AAR message. At this threshold value, the end device's connectivity is low and approximately 1 m from the cell boundary, as shown in Figure 4. AWT is adjusted to 4 s according to LQI_THRESHOLD and the node speed. When node speed is high, it can quickly leave the cell and reach the neighboring cell before AWT is expired. At low speed, it is likely to reach the neighboring coordinator after the expiration of the AWT. However, at very low speed the node can be considered as static, and association can be made without CADA. Therefore, AWT is mirrored for the lowest speed of 0.5 m/s. In this case, after the parent coordinator triggers the AAR message, it takes 2 s for the device to reach the neighboring cell. Hence, AWT value (4 s) is set to account for travelling time, coordinator discovery delay, and transmission of the association request.
Network parameters.


Simulation setup comprised of both organized and random node arrangements. (a) Floor map of organized cluster-tree-based WPAN. (b) Organized (grid) node arrangement with 65 coordinators. (c) Random node arrangement with 25 coordinators in 50 × 50 m. (d) Random node arrangement with 50 coordinators in 50 × 50 m. (e) Random node arrangement with 100 coordinators in 50 × 50 m.
The performance of CADA depends on the selection of IBO, which is selected according to applications data rate, speed of end devices, and network topology. We demonstrate how IBO affects the performance of CADA in our network at different data rates and node speeds. In Figure 8, the average throughput observed at various IBO's is shown, when the end device is moving at 0.5 m/s and 1 m/s. Using the IBO of two or less decreases the beacon interval considerably that reduces the available bandwidth [1] due to frequent beacon transmissions. As a result, throughput decreases. On the other hand, using IBO five and above results in late detection of cell change and long waiting time for neighbor discovery. It can be observed from Figures 8(a) and 8(b) that BO 3 provides higher throughput at both data rates and node velocities for both organized and random topologies.

Avg. throughput observed at different ideal beacon orders: (a) organized topology and (b) random topology.
6.2. Throughput
The average throughput observed at PAN coordinator by using CADA and IEEE 802.15.4 in both organized and random topologies is shown in Figures 9(a) and 9(b), respectively, for mobile node speed of 0.5 m/s and 1 m/s. In the case of 802.15.4, increasing beacon interval length makes coordinator discovery difficult for mobile node moving at 1 m/s that is evident from the immediate fall in throughput at higher BO in Figure 9. IEEE 802.15.4 has lower throughput in organized topology as compared to random topology due to lower number of possible neighboring coordinators. On the other hand, the parent coordinator in CADA preemptively informs the neighbors to decrease their beacon intervals. As a result, neighboring beacons at lower IBO provide prompt discovery of coordinator.

Avg. throughput of CADA and IEEE 802.15.4: (a) organized topology and (b) random topology.
The impact of number of coordinators in WPAN is shown in Figure 10, where 25, 50, and 100 FFDs are randomly deployed in a 50 × 50 m field. With more FFDs within the field, the possibility of discovering any coordinator using passive scan increases. Therefore, the throughput of CADA is higher for 50 and 100 FFDs. With only 25 FFDs in the field, the possibility of finding neighbor FFD in the path of mobile node is less, resulting in lower throughput.

Avg. throughput of CADA using 25, 50, and 100 FFDs.
Throughputs for CADA, CADA with orphan scan, and CADA without early registration in organized and random topologies with end device speed of 0.5 m/s are shown in Figure 11. In case of random topology, 50 FFDs were used in 50 × 50 m field. In CADA, mobile nodes do not use orphan scan and early registration is done by using the AAR message. Therefore, the latency of coordinator discovery and association is less, resulting in higher throughput. The latency of orphan scan which is performed after every cell change on three different channels is higher than the response waiting time faced during association message exchange. As a result, using CADA without early registration gives slightly higher throughput than using CADA with orphan scan.
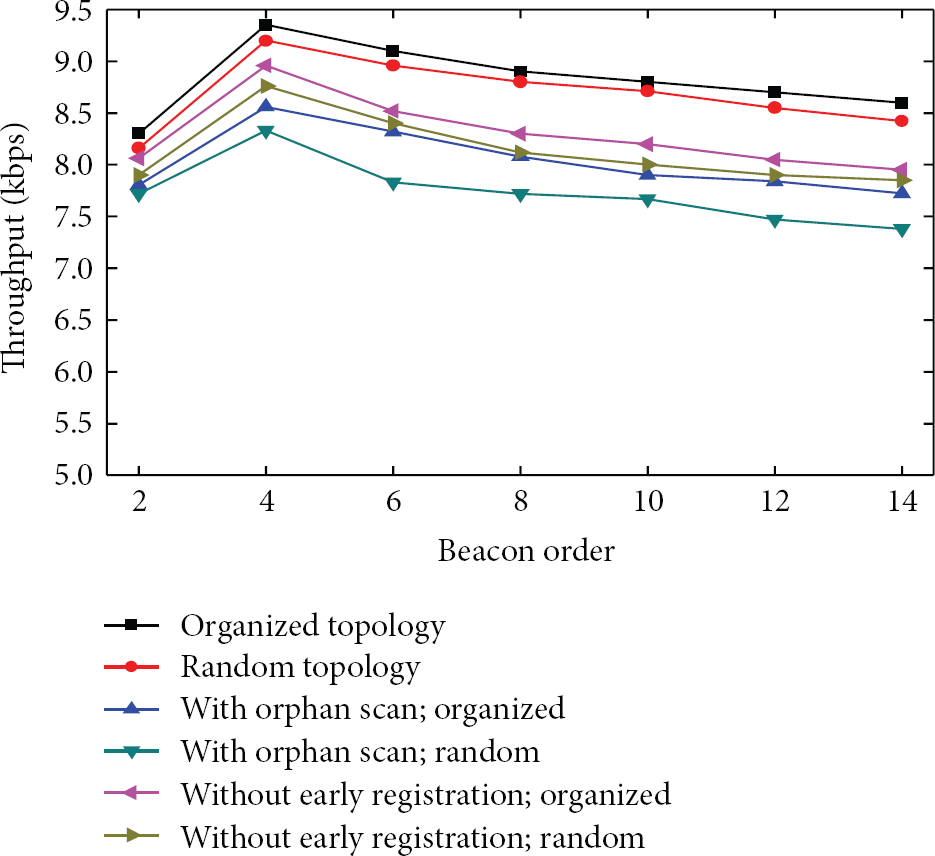
Avg. throughput of CADA and its extensions.
6.3. Association Time
In this work, the association time is calculated as the time spent on coordinator discovery plus the time used for exchanging association messages during simulation. The percentages of time spent on association by a mobile node moving at 0.5 m/s and 1 m/s, in both organized and random topologies, are shown in Figures 12(a) and 12(b) respectively. In case of IEEE 802.15.4, at higher BO values, mobile nodes spend most of their time in scanning channels for available beacons. CADA decreases the association time by both lowering beacon interval length in the close vicinity of mobile node and by decreasing the message exchange time itself. However, high speed of mobile node causes sudden cell changes and increases the time spent on association. As shown in Figure 12, more time is spent on association at 1 m/s than at 0.5 m/s for both CADA and IEEE 802.15.4.
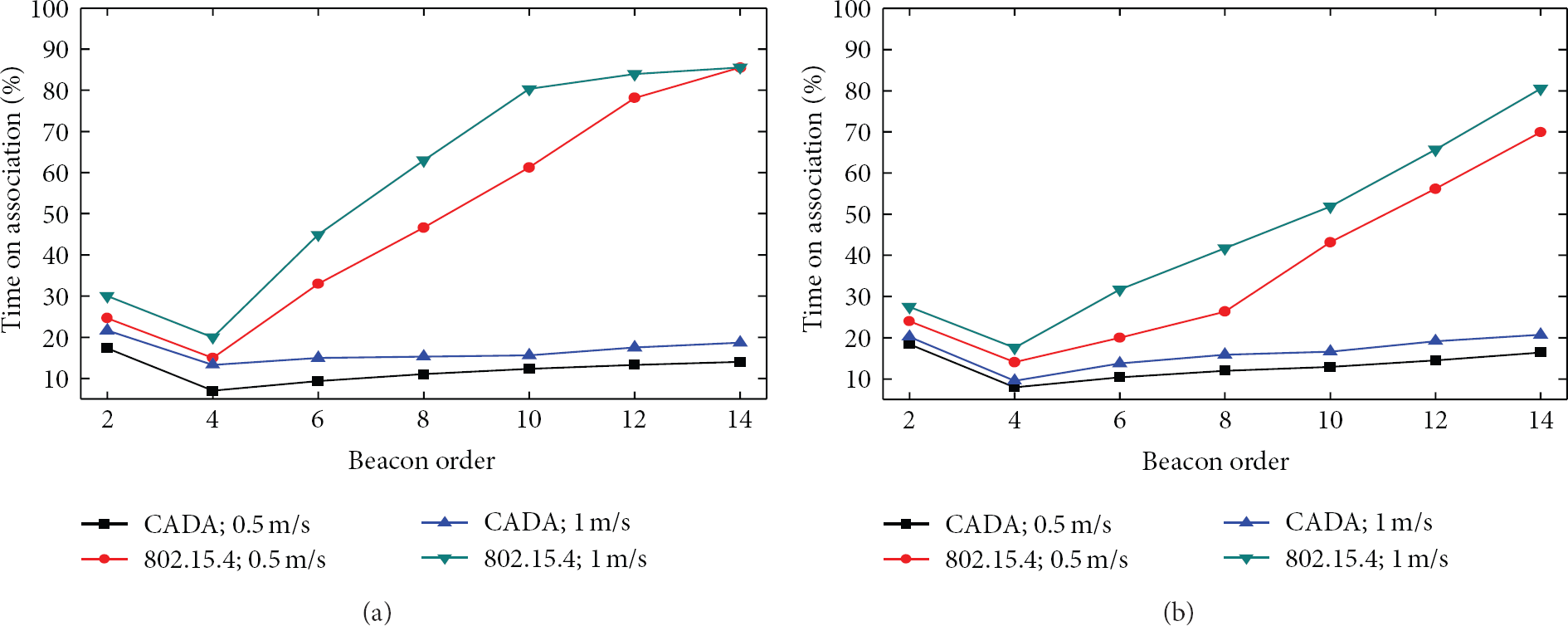
Percentage of time spent on association: (a) organized topology and (b) random topology.
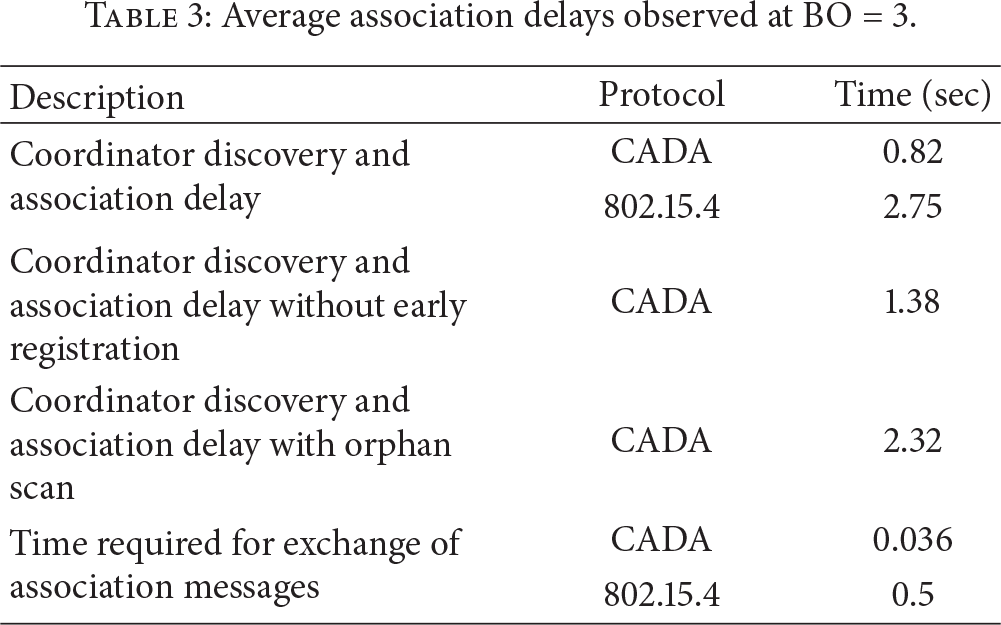
The average association latencies observed during cell change at beacon order 3, for CADA, CADA with orphan scan, CADA without early registration and IEEE 802.15.4, are shown in Table 3. BO of 3 is used for comparison under the simulated network scenario because the performance of IEEE 802.15.4 is near maximum at this BO in terms of throughput and delay. The discovery and association time of CADA is much lower than IEEE 802.15.4 in Table 3, because orphan scan is not required in preemptive association as node is already associated at the time of finding new coordinator. This significantly reduces the latency of discovery. Likewise, early registration allows a neighboring coordinator to allocate address to a device that is likely to enter into its cell. This reduces the association message exchange time resulting in overall decrease of coordinator discovery and re-association procedure.
Average association delays observed at BO = 3.
6.4. Association Success Rate
Success rate of association is defined as the ratio of completed associations to the required number of associations during simulation. The mobile end device is required to execute 36 cell changes during its movement in the organized topology. The percentage of successful associations in organized topology using CADA and IEEE 802.15.4 are shown in Figure 13. Since passive discovery is not possible for mobile nodes at higher beacon interval lengths, the success rate of IEEE 802.15.4 drops immediately with the increase in BO. With the increase in beacon interval, beacons are sent less often thus requiring more time for discovering and associating devices to listen and wait for beacons. CADA on the other hand, preemptively drops the BO of neighboring coordinators if one of its members is moving away from its cell. Thus, allowing the mobile device to perform quick discovery and re-association with neighbor coordinator.

Association success rate in organized topology.
In random topology, a device can be associated with any neighboring coordinator after the cell change and different paths can be taken by a mobile node, as shown in Figures 7(c), 7(d) and 7(e). Therefore, instead of success rate, the total number of associations made by the mobile node in 50 × 50 m field with 50FFDs is shown in Figure 14. As in organized topology the total number of associations drastically drops at higher beacon order, while using IEEE 802.15.4. In CADA, the use of LQI for mobility detection successfully allows parent coordinators to broadcast AAR messages. As a result, at higher BO, CADA is capable of providing more associations as compared to IEEE 802.15.4.

Number of associations in random topology.
6.5. Energy Consumption
The residual energy of network obtained using CADA, IEEE 802.15.4, and CADA + BOA (beacon order adaption) with 50 FFD and one source node in random topology is shown Figure 15. The BOA scheme is similar to [3] and uses minimum and maximum BO of 4 and 12, respectively. At 100 seconds in the simulation time mobile node transmits data to PAN coordinator for 500 seconds. Without BO scheduling, at lower BO, energy consumption is a factor of both beacon transmissions and data delivery. Therefore, the continuous decrease in energy is observed at BO = 4 for both IEEE 802.15.4 and CADA. At higher BO, the energy of nodes is largely utilized because of data delivery. In case of IEEE 802.15.4, at BO = 12 when the mobile node moves away from the parent coordinator, it is unable to make new association and transmit data. As a result, less energy is consumed due to lower throughput. The energy consumption of CADA improves with the use of BOA scheme because it increases the BO of clusters not involved in communication.

Residual energy of network in random topology.
7. Conclusions
In this paper, we have presented a swift passive discovery and association scheme for mobile end devices moving in WPAN. The scheme decreases the BO of coordinators near the mobile node for quick coordinator discovery. LQI is used by the coordinators for predicting mobility of end devices and for triggering of assisted association mechanism. Detailed performance analyses, in both organized and random topologies, shows that coordinator discovery is possible even at maximum BO using CADA. Also, the early registration mechanism of CADA decreases the latency of association message exchange 13 times as compared to IEEE 802.15.4. On balance, CADA substantially increases the throughput and association success ratio by lowering the time required for discovery and association as compared to IEEE 802.15.4.
Footnotes
Acknowledgment
This work was supported by the National Research Foundation of Korea (NRF) Grant funded by the Korean government (MEST) (no. 2011-0013062).