
Abstract
We consider real-time locating systems (RTLS) consisting of radio frequency identification (RFID) tags and multiantenna readers to propose a novel location estimation algorithm based on the concept of space-time signature matching for multipath environments. In contrast to previous fingerprint-based approaches that rely on received signal strength (RSS) information only, the proposed algorithm uses angle, delay, and RSS information from the received signal to form a signature, which in turn is utilized for location estimation. We evaluate the performance of the proposed algorithm in terms of the average error probability. Simulations and analytic results confirm the effectiveness of the proposed algorithm for location estimation even in non-line-of-sight (NLOS) environments.
1. Introduction
RFID technology has greatly extended our ability to monitor and control the physical world and has been proposed for various applications including search, rescue, disaster relief, and target tracking. The inherent characteristics of these applications make an object's location an important element [1, 2].
Wireless localization, the location estimation of an object in wireless networks, has been extensively investigated. The Federal Communications Commission (FCC) has recently amended its rules to permit the use of improved RFID systems to facilitate seaport security efforts [3]. The rules will permit the use of more powerful RFID devices with commercial shipping containers, which, in turn, will offer improved security at the nation's ports, rail yards, and warehouses. One of the representative standards of these applications is the RTLS. It is a real-time location estimation system based on RFID technology at a 2.45 GHz band that is intended to provide an approximate location (within 3 m in line-of-sight (LOS) environment) with frequent updates. It operates in conformance with the International Committee for Information Technology Standards (INCITS) 371 RTLS standard [4].
Many wireless location techniques have been investigated and can be divided into two approaches: geometric-based techniques, such as angle of arrival (AOA) [5], time of arrival (TOA) [6], time difference of arrival (TDOA) [7], and location fingerprinting approaches [8, 9]. In the case of AOA, TOA, and TDOA, location estimation is based on triangulation techniques that require LOS between the transmitter and the receiver. However, in practical wireless environments, it is difficult to guarantee a LOS path between the transmitter and the receiver. Therefore, the time and angle of arrival signal is affected by multipaths, and the estimation accuracy is generally considerably reduced in NLOS environments. On the other hand, location fingerprinting techniques solve the problems related to NLOS and multipath propagation by using a “radio map” of the RSS for a target environment. Although frequent and extensive site measurements are often required, location fingerprinting performs well in NLOS conditions [8]. Thus, In this paper, we focus on location fingerprinting approaches since they are more suitable for NLOS applications. Many fingerprinting-based techniques have been proposed for location estimation in wireless networks, with a special emphasis on wireless local area network (WLAN) applications [8, 10, 11]. Unfortunately, most existing research related to location fingerprinting only uses the RSS information. The location is estimated by comparing the current measured data with the “radio map” of the premeasured database. This approach is simple to implement and gives reasonable accuracy in small area applications. However, it has limited value for some applications, such as outdoor scattering environments where radio signal propagation is very complicated because of severe multipath effects. In this case, unfortunately, the RSS information is not enough for accurate location estimation. To estimate a location more precisely, we need more information to characterize the received signal's features.
In this paper, we investigate a location estimation algorithm for RTLS consisting of RFID tags and multiantenna readers to propose novel location estimation algorithms based on the concept of space-time signature matching in NLOS multipath environments. The proposed algorithm uses angle, delay, and RSS information from the received signal; this is in contrast to previous fingerprint-based approaches [8–10], which rely on RSS information only to form a signature that is in turn utilized for location estimation. We evaluate the performance of the proposed algorithm in terms of the average error probability. The organization of this paper is as follows. Section 2 provides a description of the system model, an overview of RTLS and the basic space-time communication model in the proposed approach. Section 3 describes the proposed location estimation algorithm based on the space-time signature matching technique and presents the detection method. Section 4 describes multipath channel generation based on the ray-tracing technique, and simulation results are presented to verify the effectiveness of the proposed algorithm. Conclusions are given in Section 5.
2. System Model
2.1. Overview of RTLS
A real-time locating system is an automatic system that continually monitors the locations of objects. The system continually updates the database with current tag locations as frequently as every several seconds or as infrequently as every few hours depending on the mobility of the target tags. In typical applications, systems are required to track thousands of tags simultaneously, and the average tag battery must last for five or more years [12]. The RTLS infrastructure, as shown in Figure 1, typically consists of RTLS transmitters (radio tags), RTLS receivers (readers), and the RTLS server. RTLS transmitters blink (or transmit) a direct sequence spread spectrum (DSSS) signal, and RTLS readers, whose locations are fixed, receive signals from the tags. The RTLS server aggregates data from the RTLS readers and determines the tag's current location. Each DSSS transmission from a transmitter contains a “blink” packet containing subblinks. All subblinks within a blink are identical to provide time diversity.
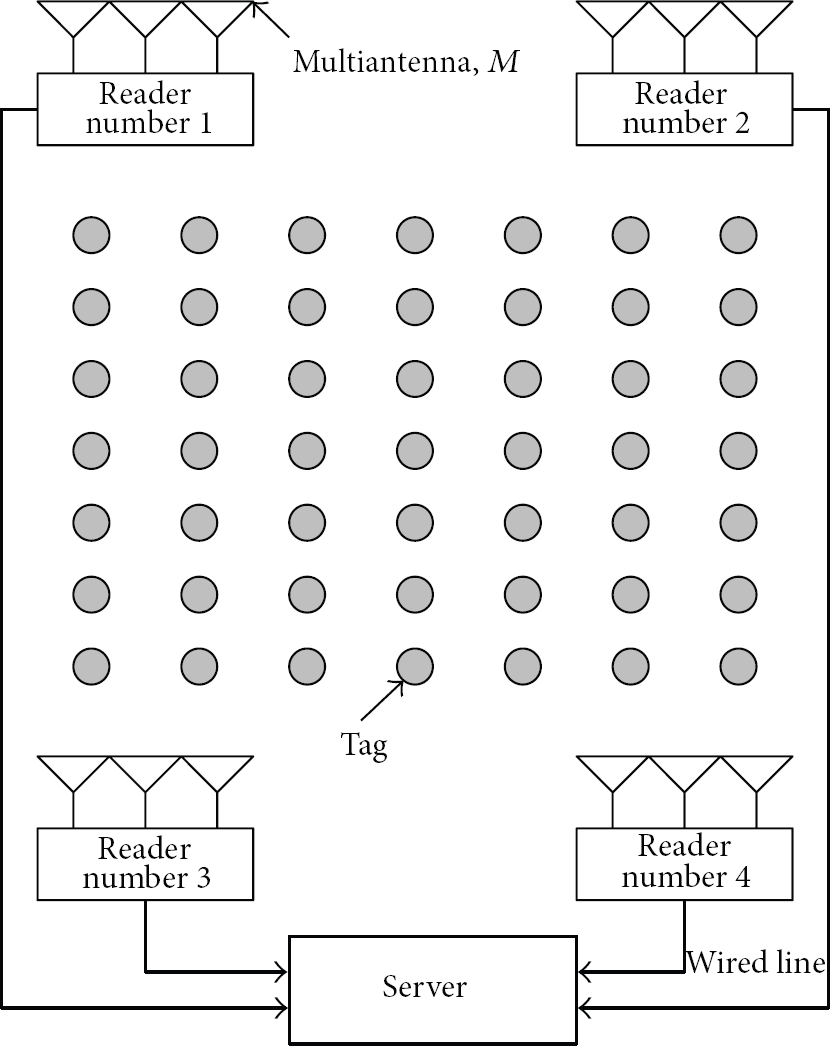
Elements of RTLS infrastructure: tags are regularly spaced for illustration.
Each subblink includes the RTLS transmitter's 32-bit identification (ID), 4 bits of status data, cyclical redundancy check (CRC) data, and optional telemetry data. The number of subblinks per blink,
2.2. Space-Time Communication
We assume that


The transmitted signal


From (3), the physical channel can be expressed as

3. Proposed Location Estimation Algorithm
This section begins with an overview of conventional fingerprint-based algorithms and our algorithm, followed by the spatiotemporal partitioning technique. This technique serves as a key role in our algorithm because the angle and delay associated with each scatterer can be obtained through this. The details of our algorithm are then presented.
3.1. Fingerprint-Based Location Estimation
Conventional fingerprint-based location estimation algorithms rely solely on the received RSS measured at multiple single-antenna receivers. First, an RSS database is formed by transmitting signals from a large number of locations called reference points and storing the RSS measured at all receivers. Once the database is ready, the system is able to estimate the location of an object at an unknown location by finding the location in the database whose RSS values most closely match the current RSS values.
However, the estimation accuracy of the fingerprint technique is limited by the fact that it relies only on RSS. Although RSS is an important characteristic for a location, RSS-based algorithms cannot distinguish two locations if their RSSs' are similar, even if they induce different angles of arrivals and delays. This is especially true in the presence of multipaths. Thus, in this paper, we propose a novel method based on space-time signature matching to accurately estimate the location by utilizing not only the RSS but also the angle and delay information of the received signal. Two key differences are that our algorithm can (1) utilize angular information captured through multiple antennas at readers and (2) resolve powers contributed by each ray or path in contrast to RSS, which is the aggregate of the path contributions.
The proposed space-time signature matching algorithm is carried out in two steps. In the first step, reference signatures are generated for every reference point. A tag at an unknown location can then be estimated by comparing the signature generated from the received signal with reference signatures. This is explained in more details later. We assume that there are K readers and
Step 1.
Reference signature database generation
Place a transmitter at one of the reference positions and let it transmit a known spread spectrum waveform. Readers receive the waveform and generate a signature vector of this location. Denoted by These signatures Move to the next reference point until all reference points, Thus, for Once the reference signatures are obtained, we can locate a tag at unknown position as follows.
Step 2.
Location estimation process.
A tag at unknown location transmits a known waveform, and readers compute a signature Compare the currently computed signature with the reference signatures in the database. Estimate the unknown tag's location by finding the location in the database whose signatures are closest to the currently obtained signature. All information (i.e., angle, delay, and RSS information at each reader) is used or combined to estimate the tag location.
3.2. Path Partitioning in Angle and Delay
The main concept behind our algorithm is that the estimation accuracy can be greatly improved by working with a detailed map or signature of a scattering environment. The detailed signature consists of the angle, delay, and path gain associated with each scatterer, which provides more information to the estimator than the conventional RSS-based methods. Such information buried in the regular channel vector or matrix clearly shows up in the virtual channel vector, which is explained next.
A key property of the virtual channel representation is that its coefficients represent a resolution for the multipath in angle and delay commensurate with the signal space parameters M and W, respectively [14, 15]. The virtual representation in the angle corresponds to beam forming in M fixed virtual directions:

Its columns are the normalized steering vectors for the virtual angles, and they form an orthonormal basis for the spatial signal space. Using this, a virtual spatial vector


The multipath responses within each spatial beam can be further partitioned by resolving their delays with resolution
Thus, the angle-delay virtual representation partitions the multipath responses into distinct angle-delay resolution bins: the virtual coefficient

Angle-delay resolution bins.
3.3. Generation of Signature Vector
The signature vector is what we eventually use to estimate the location. It is computed from the received signal at each reader, as illustrated in Figure 3.
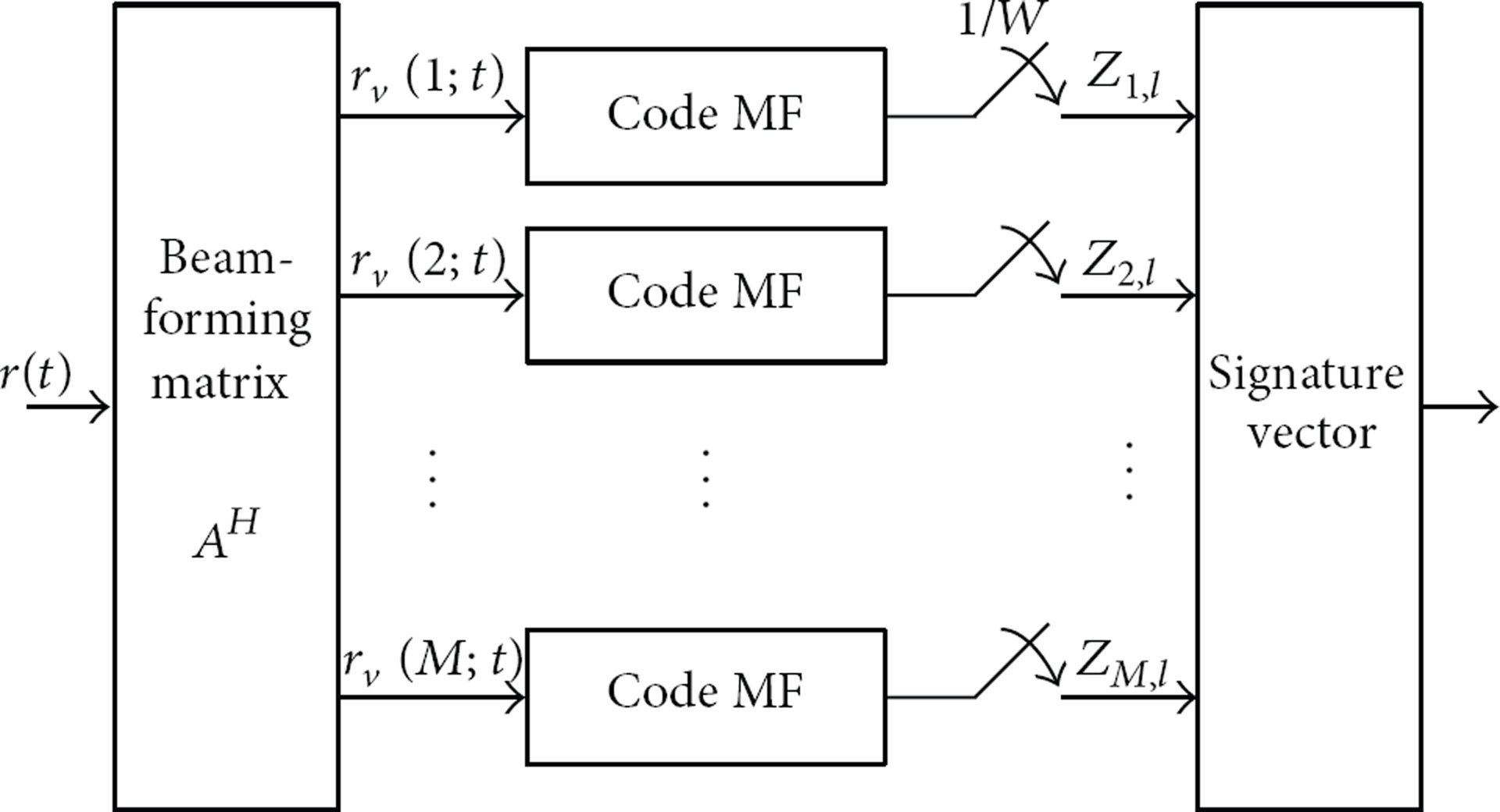
Computation of the signature vector: angle-delay matched filtering.
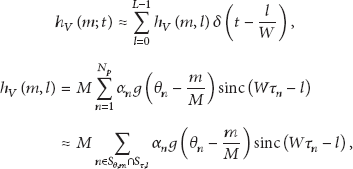
Let

Note that

Thus, correlating each


Example of the signature at each reader for a tag position.
After obtaining signature vectors from all reference points, readers constantly monitor the field. When a strong signal is detected, each reader forms a signature vector
3.4. Coherent Detection
When a tag of unknown location is placed at one of

The probability density function (pdf) of


We now analyze the error probabilities of this algorithm. When the true tag location is i, the error probability can be upper bounded using the union bound technique as



We show the above upper bound with the Monte-Carlo simulation in Section 4 to confirm the validity of the simulation.
4. Simulation and Discussions
The performance of the proposed algorithm is evaluated through simulations and theoretical analysis. This section first describes how we generate multipath channel realizations and then presents the simulation and analytic results with discussions.
4.1. Generation of Multipath Channel Realizations
We consider a field of a 300 m × 300 m square region. We assume that reference tags are randomly distributed over the region, and four readers equipped with five antennas each are placed in the corners of the region. Twenty rectangular-shaped scatterers are placed inside the region in a random manner. We measure signature vectors at reference tag positions separated by 3 m (see Figure 5).

Sample snapshot of ray tracing at each reader.
In order to generate realistic multipath channel realizations that are suitable for seaport wireless environments, we develop a site-specific channel simulator based on the deterministic two-dimensional ray tracing technique. The ray-tracing technique has been used for accurately predicting site-specific radio propagation characteristics [17]. For each transmitter and receiver pair, ray-tracing simulates all paths arriving at the receiver to produce necessary information such as the RSS, multipath delay, AOA, and number of paths. In the ray-tracing algorithm, most rays arrive at the reader via multiple reflections due to the objects in the environment. We only consider reflections of the surface of scatterers, not diffraction. The angle of arrival, distance of travel (or delay), and number of reflections are recorded for every path and for every pair of a reference position and reader. To find a path, a reference point draws a line from itself along a certain angle. There can be three cases. (1) If the line does not intersect a reader or scatterer, we examine the next angle, which is the previous angle incremented by a small amount (e.g., 1°) until all 360° have been examined. (2) If it intersects a reader, we are done with this angle, so we store all the information and examine the next angle. (3) If it intersects a scatterer, a new line is drawn according to the law of reflection, and the search continues until (1) or (2) is encountered. Figure 5 shows a sample snapshot of the ray-tracing results. In Figure 5, dark lines represent paths that eventually arrive at a reader, and light lines are those that initially intersect a scatterer but do not finally arrive at a reader. In this paper, we assume there is no signal fluctuation for at least the packet duration T because there is seldom movement of a tag in an RTLS environment.
4.2. Performance Evaluation
The effectiveness of the proposed algorithm for enhancing the accuracy of location estimation in NLOS environments is validated through computer simulation and theoretical analysis. In the simulation, 1,135 tags are considered as reference positions, and the transmit signal-to-noise ratio (TXSNR) was used as an SNR criterion. The estimation performance of the proposed algorithm is evaluated in terms of the average error probability. Figures 6 and 7 show the results of the proposed algorithm when there is no movement, that is, tag locations are fixed. In this case, we consider coherent detection as a detection method.

Average error probability of location estimation; comparison between simulation results and analytical results.

Average error probability of location estimation for different number of collaborating reader.
Figure 6 illustrates the estimation performance of the proposed algorithm in terms of average error probability for
Figure 7 shows the effect of collaborative processing (combing) of the multiple readers on the average error probability for
5. Conclusions
In this paper, we investigated location estimation algorithms for real-time location systems and proposed novel location estimation algorithms based on the space-time signature matching in NLOS environments. Unlike existing works, we incorporated all available information (angle, delay and RSS) into a signature vector via spatiotemporal processing, and we did not require line-of-sight environment for successful operation. We derived the upper bound of the average error probability for coherent detection and carried out simulations. The two-dimensional ray-tracing technique was used to generate multipath channel realizations. From the results, we confirmed that in a fixed tag location the proposed algorithm could reliably estimate the target tag location even in the NLOS environments and the estimation accuracy greatly improved as the number of collaborating readers increased.