
Abstract
The congestion control algorithm based on the weighted directed graph is designed for the network congestion over the wireless sensor network. The congestion problem is modeled as a distributed dynamic system with time-varying delay, and it can be proven that the sent rate for all nodes converges to the available bandwidth of the sink by the proposed congestion control algorithm. Via Lyapunov function, the validity of the proposed algorithm is shown under the varying network topologies. Ns simulation results indicate that the proposed algorithm restrains the congestion over the wireless sensor network, maintains a high throughput and a low delay time, and also improves the quality of service for the whole network.
1. Introduction
Over the last decades, there have been widely researches in the area of the wireless sensor networks (WSNs) [1]. WSNs are being deployed for several mission-critical tasks, such as habitat monitoring [2], structural health monitoring [3, 4], image sensing [5], and physical game [6]. Typically, a sensor network may contain thousands of nodes, which are cheap, and small size sensors; otherwise, in many applications, the sensor nodes will be deployed in the remote area, such as the high mountain area, and the satellite in the outer space, in which case recharging is not feasible. Thus, the main focus for WSNs is on the low energy use within the autonomous, cooperative nodes which may be constrained in terms of a small memory and a low computing capability.
A wireless sensor network consists of the distributed autonomous sensors to monitor physical or environmental conditions, such as temperature, sound, vibration, pressure, motion, or pollutants. The physical parameters and the information of the interactions, in conjunction with the variable wireless network conditions, may result in unpredictable behavior in terms of the traffic load variations and the link capacity fluctuations [7]. The network condition is worsened by link bit errors [8], medium contention [9], or potential handoff operations in wireless networks. These hostile factors are likely to occur in WSN environments, thus increasing the possibility of congestion. In data networking and queuing theory, network congestion occurs when a link or node is carrying so much data that its quality of service deteriorates. In the context of WSNs, data is passed using multihop routes between sensors until they reached the sink, so the convergent (many-to-one) nature of WSN, especially in single-sink WSNs, increases the susceptibility to congestion. When a network is congested, it has settled into a stable state where the traffic demand is high, but little useful throughput is available. The high levels of the time delay and packet loss caused by congestion may deteriorate the quality of service (QoS). Especially, packet loss may activate the time-out retransmission scheme of TCP, and the retransmitted packet may worsen the congestion and even cause more retransmission request. The vicious circle may consume more energy in the retransmitted packet repeatedly and ineffectively. Consequently, congestion in WSN causes radical decrease in the delivery ratio and an increase in per-packet energy consumption.
The resource limited and unpredictable characteristics of WSNs necessitate decentralized, robust, self-adaptive, and scalable mechanisms [7]. The novel congestion control for WSNs should be simple to implement at an individual node level with minimal energy usage. Queue-based congestion control schemes and rate-based ones are the most popular congestion control schemes to solve the congestion problem. The drawback [10] of the queue-based schemes is that a backlog is inherently necessitated; on the other hand, the rate-based schemes [11] can provide early feedback for congestion. So the rate-based scheme is chosen in this paper to solve the congestion problem for WSNs. As the wireless nodes can self-organize into a wireless sensor network, in this architecture, the wireless sensor network is considered as a distributed dynamic system. Natural designs have inherent powerful characteristics and are often more effective and simpler than man-made designs [12]. And the consensus analysis of the complex network theory, such as fish swarming and bird flocking, is used in our paper. With the help of the graph theory, a congestion control algorithm based on consensus analysis (CC-CA) is proposed in this paper, considering the sink as a leader. Ns simulation results indicate that our CC-CA could restrain the congestion over wireless sensor network and maintain a high throughput and a low delay time. It can also improve the QoS for the whole network. As can be seen from the conclusion, CC-CA designed for WSN is superior from throughput, drop ratio, and average delay time of the conventional congestion control.
The rest of the paper is structured as follows: Section 2 presents the previous works on congestion control for WSNs. Section 3 presents the congestion model based on the graph theory for WSN. In Section 4, the theoretical results for congestion control algorithm based on a leader are provided. Section 5 contains a performance evaluation of the proposed scheme and a comparison with TCP protocol. The conclusion of this paper is presented in Section 6.
2. Related Works
The conventional congestion control algorithms are almost end-to-end schemes [14], which follow the TCP's end-to-end mechanism. A centralized congestion control (CC) approach cannot be generally applied since it provokes several serious drawbacks [15]. Firstly, such approach leads to excessive communication load in the network which rapidly depletes the batteries [1]. Secondly, the time-varying nature of the radio channel and the asymmetry in communication links make it harder for even regulated traffic to reach the sink [16]. Thirdly, hop-to-hop schemes [17, 18] could result in a better performance and a faster reaction than the end-to-end mechanisms. Finally, WSNs permit simple processing and a decision making by individual nodes [19] rather than a centralized approach.
Early studies in the area of the sensor networks were mostly focused on fundamental networking problems, for example, topology [20], routing [21], and energy efficiency [22], largely ignoring network performance assurances.
As the queue length in buffer suggested the current network condition, fusion [23] is a congestion mitigation technique that uses queue lengths to detect the congestion. Three different techniques have been adopted to alleviate the congestion in fusion, which included hop-by-hop flow control, rate limiting, and a prioritized MAC. IFRC [24] is a distributed rate allocation scheme that uses queue sizes to detect the congestion and further shares the congestion state through overhearing.
Rate-based congestion control may react more rapidly than queue-based scheme, so a large number of congestion control based on data rate emerges in WSNs. The bandwidth for the sensor node in ARC [25] is split proportionally between route-through and locally generated traffic, by estimating the number of upstream nodes. Congestion control and fairness for many-to-one routing in sensor networks [13] is another rate assignment scheme that uses a different congestion detection mechanism from IFRC.
QoS technique is also widely used in congestion control of the wireless sensor networks. In [26] a dual-path QoS routing protocol is designed to increase the network lifetime and reduce packet delay. MQOSR [27] is another QoS-enabled multipath routing protocol, assuming that the base stations are typically many orders of magnitude more powerful than sensor nodes. Global positioning systemss (GPS) [28, 29], which is providing the location information, is used to discover the congestion regions, while GPS receivers are expensive and not suitable in the construction of the small cheap sensor nodes.
3. Congestion Model Description
The self-organization and multihop characteristic of the WSNs indicate that the wireless sensor network is modeled as a distributed dynamic system based on the directed graph theory. The sink is considered as a “leader” node, in which the mass of information is gathered and computed. We consider that
This paper considers that the vertex indexed by 0 is assigned as the “leader,” which is the sink in WSN. The other vertices of the graph G indexed by

where
To study a leader-following problem, the connection weight between nodes i and the leader, denoted by

In WSN, the sensor may begin to transmit packet suddenly or perform the backoff algorithm due to mutual interference. Namely, for the weighted directed graph
Remark 1.
The topology of WSN is time varying. And this topology is considered unchanged in any interval
4. Congestion Control Based on the Consensus Analysis
It is indicated in [30] that, when the offered load exceeds the available capacity in the link, the packet will accumulate in the router buffer, which will induce the congestion. The congestion can be avoided, if the data bulk exchange of all nodes for one task converges to the same equilibrium point in the network. Then the congestion control problem can be attributed to the consensus problem of the complex network. Furthermore, in our simulation, all the nodes are considered the same as each other, and they split the bandwidth fairly.
Here, the entire considered data rate accelerates in a rule:

where
Formula (3) can be written in a matrix form during the interval

where
Lemma 2.
Let G be a graph on n vertices with Laplacian
Denote

system (4) can be rewritten as

where

Before the discussion of the consensus problem, we introduce Lemma 3 for time-delay system (6). Consider the following system:
Lemma 3 (Lyapunov-Razumikhin theorem).
Let

In addition, there exists a continuous nondecreasing function

then the solution
Lemma 4.
The matrix
The proof of Lemma 4 can be looked up in [32].
Theorem 5.
For system (6), take

where

if node 0 is globally reachable in
Proof.
Since node 0 is globally reachable in

Take a Lyapunov-Razumikhin function

is positive definite.
By Leibniz-Newton formula,
From

where
Take

we have

If k satisfies (11),

then
Remark 6.
There are two limiting conditions in Theorem 5. Firstly, the delay upper bound τ is sufficiently small. The timeout time in the retransmission timeout is small enough with initial value 3 s. Secondly, node 0 is globally reachable in
Theorem 5 proves that the CC-CA guarantees the convergence of the system error; in other words, the data sent rates for all nodes converge equally to the sink's. The proposed algorithm maintains an equilibrium state for the whole WSN, avoiding congestion. Figure 1 shows the program flow chart of the CC-CA.
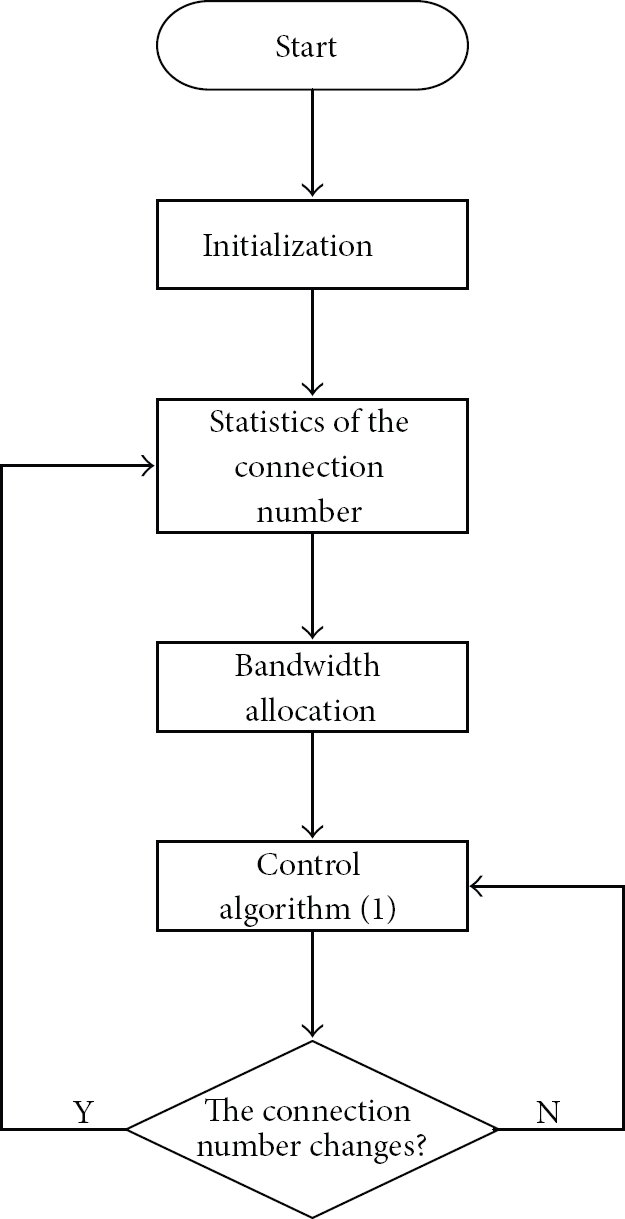
Program flow chart.
5. Simulation
This section studies the performance of the proposed CC-CA under a general wireless sensor network configuration. The simulation environment models a sensor network with 200 nodes deployed randomly over an area of 300 × 300 m. The coordinate of the sink is (144, 168). Simulations are conduced using ns-2 network simulator, and the simulation time is 300 sec.
Test 1. In order to verify the validity of the proposed algorithm in variable condition, the number of the data source is set to 2, 5, 8, and 10, respectively. The throughput and the drop ratio are shown in Table 1 for the different connection numbers. The suitable rate for the sink is assigned to all the other sensors, reducing the packet cumulate in the sensor buffer. As discussed in Section 1, the energy usage is the key factor in WSN. The lost parameter η is used to measure the energy efficiency of the whole network, which is defined in [33]. The lost parameter η at distinct rate is shown in Table 2.
Throughput and drop ratio within different connection numbers.

Loss parameter η at distinct rate.

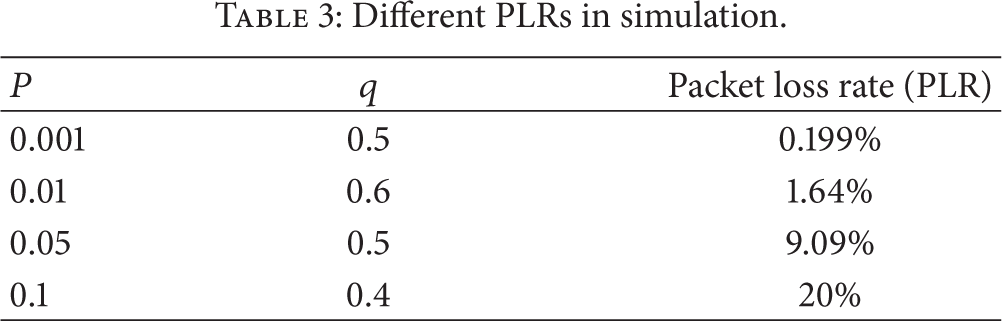
Test 2. Test 2 studies the performance of CC-CA by the channel error. The Gilbert model [34] is used to structure the packet loss ratio (PLR) in wireless link. The PLRs involved in Test 2 are provided in Table 3, where p means the probability from “good” state (0% PLR) to “bad” state (100% PLR); q is the probability from “bad” state to “good” one. The throughput and the average delay with different PLRs are shown in Figures 2 and 3, respectively. The performance of CC-CA is tested in varying degrees of congestion by changing the number of the data sources. In our test, most of the packet drop is caused by the link error; by contrast to the traditional wired network, most of the packet losses (sometimes represented as duplicate acknowledgements) are suggested as network congestion notifications, and the end host reduces the transmit rate.
Different PLRs in simulation.
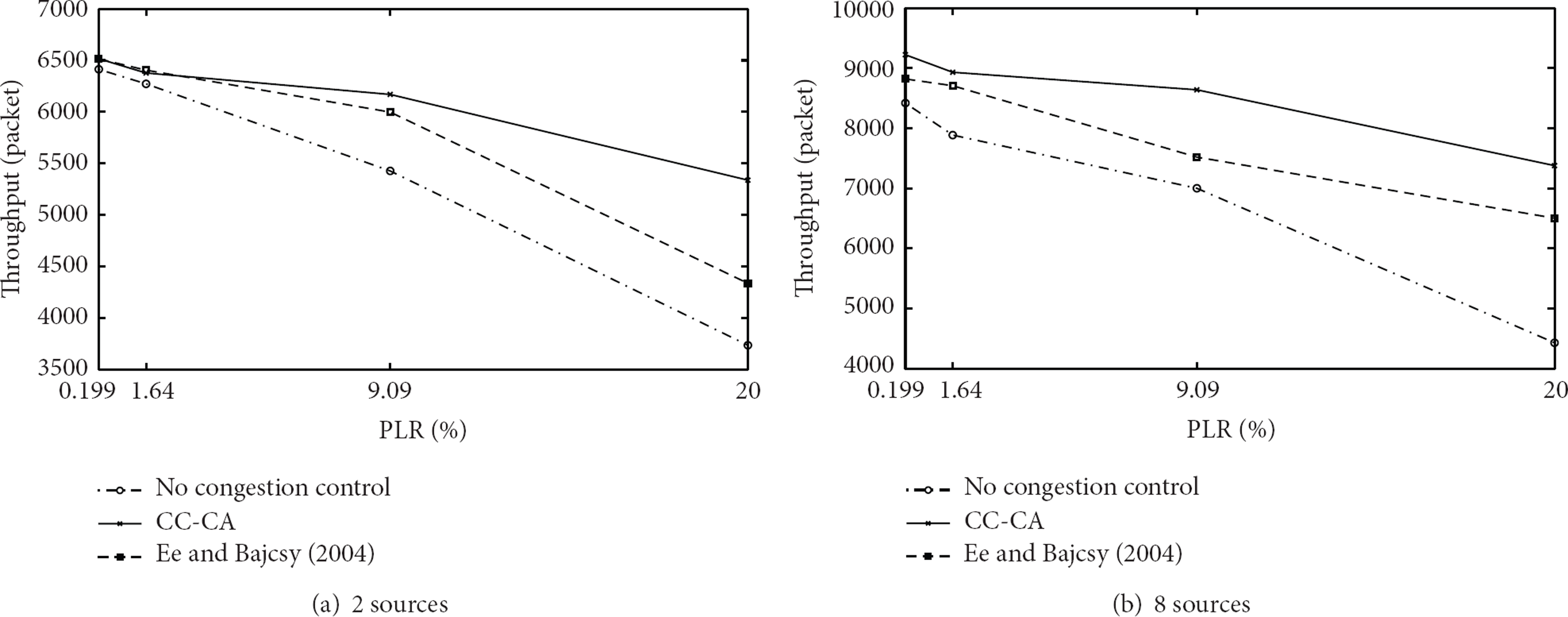
Throughput in different PLRs.

Average delay in different PLRs.
Simulation results indicate that our CC-CA is able to utilize the network resources more efficiently with low drop ratio and low delay time.
6. Conclusion
The congestion problem is unavoidable because of the many-to-one characteristic in the wireless sensor network, which causes the channel quality deterioration and the loss ratio rise. It leads to packets drops at the buffers, increased delays, wasted energy and requires retransmissions. Based on the consensus problem of the complex network, a novel congestion control algorithm (CC-CA) is introduced in this paper, which provides a better performance. At the same time, only the single-sink topology is discussed in the paper, so the multisink sensor network is the further research. On the other hand, all nodes are considered to be sharing the link capacity fairly in the simulation, so an efficient bandwidth allocation protocol is needed which will improve our algorithm.
Footnotes
Acknowledgments
The authors are indebted to the National Natural Science Foundation of China (61070169, 61203048, and 61201212), the Natural Science Foundation of Jiangsu Province of China (BK2011376), the Application Foundation Research of Suzhou of China (SYG201118, SYG201239), and Specialized Research Foundation for the Doctoral Program of Higher Education of China (no. 20103201110018) for financial support.