
Abstract
In industrial contexts, most of process control applications use wired communication networks. The reliability of wired networks is indisputable and extensively demonstrated by several studies in the literature. However, it is important to consider several disadvantages provided by the use of wired technologies, like high deployment and maintenance costs and low network scalability. Although it is difficult to fully replace wired networks, wireless communication protocols have features which could undeniably affect in positive way the production mechanisms in factories. The wireless networks (WNs) are effectively used to detect and exchange information. The main communication protocols, currently available for WNs, however, do not support real-time periodic traffic flows which, as known, mainly characterize industrial networks. In this paper, we will analyze a real-time scheduling algorithm for both periodic and aperiodic traffic management, applied to networks based on IEEE 802.15.4 and Bluetooth, respectively. The main purpose of this research is to reduce, as much as possible, the packet loss on the channel, increasing at the same time the reliability of the wireless technology. Furthermore, the comparison between IEEE 802.15.4 and Bluetooth will allow to identify the more suitable communication protocol for industrial process control systems.
1. Introduction
The WNs are increasingly used in everyday life and in several heterogeneous application fields like home automation [1–5], road monitoring [6, 7], industry [8, 9], agriculture [10, 11], and health care [12, 13] to mention some. The WNs are characterized by several nodes connected to each other using architectures and protocols which depend on the environment where the application must be used. In different network topologies, nodes can work both as simple transmitters/receivers and as routers working in multihop mode. These environments are geographically limited but may be densely populated by nodes. This leads to a greater complexity in terms of communication channel reliability, which must be able to reduce, as much as possible, errors caused by collisions and interferences, and in terms of necessary costs for network implementation and management. As a consequence, a WN must satisfy several key features.
Reliability. The communication mechanism adopted in a WN must guarantee maximum reliability during data transmission, avoiding collisions and therefore ensuring the integrity of data transmitted. Interoperability. The devices used in a WN can be produced by different manufacturers. This must not represent an obstacle for devices integration inside the same WN. For this reason, the standard communication protocol adopted must be able to support the functioning of heterogeneous devices and must also allow the integration among different communication technologies, both wireless and wired. Scalability [14, 15]. A WN must be able to dynamically manage the variation of the number of nodes of a network. Some devices, in fact, can be of mobile. The network must be able to configure itself and independently manage the network topology. Low Cost. In order to make convenient the wireless technology adoption, it is necessary to make competitive devices prices. During last years, the reduction of devices prices has made “low cost” this type of technology. Low Data Rate. In a WN, devices do not need very high data rates. This is due to the intrinsic characteristics of data to manage. Low Power [16]. The WNs are often deployed in environmental contexts where it is really difficult to access. So, it is very important to reduce power consumption. The WN must apply energy harvesting policies in order to increase devices autonomy and the lifecycle of the whole network.
Most important standard protocols for WNs communication are IEEE 802.15.4 [17], IEEE 802.15.1 Bluetooth [18], 6LoWPan [19], and WilressHART [20]. Among these protocols, IEEE 802.15.4/ZigBee and IEEE 802.15.1 Bluetooth have been extensively explored. The main problem of these protocols is represented by the fact that they do not implement deadline-oriented scheduling algorithms. Thus this involves inefficiency in soft real-time contexts like, for example, industrial process control systems. The IEEE 802.15.4 standard protocol can be used in soft real-time contexts through the Guaranteed Time Slots (GTS) mechanism provided by the “beacon enabled” mode. The standard provides the use of a superframe structure defined by PAN Coordinator. The superframe is delimited by special signalling packets, called beacons, and it is divided into 16 time slots (Figure 1).

IEEE 802.15.4 MAC superframe structure.
All superframes have the same length and are characterized by an active period and an inactive period during which the PAN Coordinator and the devices can switch off the radio and enter in an energy saving state; however, the PAN Coordinator stays switched on for all active period duration. The active period is further divided into a Contention Access Period (CAP) followed by a Contention Free Period (CFP) without contention consisting of a variable number of continuous GTSs. The Bluetooth technology uses a master/slave protocol through which it is possible to connect up to seven active slaves for each wireless cell, better known as piconet, and adopts a combination of Frequency Hopping and Time Division Multiplexing (FH-TDM). Bluetooth has several characteristics which make it suitable for many application areas. The access to the transmission medium is managed by the master and it is more suitable for deterministic data transmissions because it is “time slotted.” In other words, each slot has a fixed length (625 μs) as shown in Figure 2.

Bluetooth radio links.
Moreover, this medium access mechanism is really efficient since it requires only 1250 μs for data exchange. Reduced size of each time slot produces some advantages for industrial applications since it allows to have very short time-cycles and higher accuracy (fundamental requirements in periodic real-time applications). Furthermore, The Frequency Hopping (FH), the Time Division Multiplexing (TDM), the Cyclic Redundancy Check (CRC), the Header-Error-Check (HEC), and the Forward Error Correction (FEC) allow the realization of a reliable and robust channel, in other words suitable for time-critical data transmission [21]. It is important to underline that Bluetooth does not natively support real-time communications. As demonstrated by [22], a deadline-aware scheduling should be introduced in order to ensure the satisfaction of real-time constraints. Moreover, the energy consumption of Bluetooth is not negligible although this does not represent matter of concern in industrial environments where automation applications usually require working cycles which prevent the adoption of the energy saving policies. Regarding the number of nodes in a piconet, seven slaves are enough for several applications at field level, in which each BT node can collect data from multiple devices, thus increasing the amount of exchanged information. In addition, several piconets can coexist and operate in parallel, thanks to the combination of the large number of available channels and to the frequency hopping, which allows the simultaneous presence of more transmissions on multiple channels [23]. However, in applications where there is a high number of devices and then a considerable amount of data exchange, more overlapping piconets are necessary.
This work shows an innovative deadline-aware scheduling approach for industrial process control scenarios. This approach is based on the combined use of EDF (for periodic real-time traffic flows scheduling) and CBS (for aperiodic traffic flows scheduling). Specifically, this paper shows an implementation of this approach both on IEEE 802.15.4 networks and on Bluetooth networks in order to determine the best technology meeting the requirements which characterize time-critical industrial environments. The paper is organized as follows. Section 2 describes main related works in order to determine the current state of art. Section 3 describes the network architecture and the proposed approach showing its implementation both in IEEE 802.15.4 and in Bluetooth networks. Section 4 presents a test-bed scenario in order to show network performance obtained by the proposed approach in both network technologies. Finally, Section 5 summarizes the paper reporting conclusions.
2. Related Works
2.1. Techniques to Support Real-Time Transmissions over IEEE 802.15.4
In the beacon enabled mode, the IEEE 802.15.4 standard protocol allows nodes, characterized by real-time constraints, to allocate GTSs during the Contention Free Period. The protocol supports the assignment of GTSs; in other words, a node has a number of time slots for exclusive use on each superframe. The limitation of this explicit GTSs allocation is that the resources can run out quickly because in every superframe up to seven GTSs can be allocated. In this way, other nodes cannot use the guaranteed service. Furthermore, the CFP can be underused producing, as a consequence, bandwidth waste. In order to overcome these limitations, some researcher proposed i-GAME [24], through which it is possible to provide implicit GTSs allocation for IEEE 802.15.4 networks. The allocation is based on implicit GTS allocation requests, taking into account the traffic characteristics and delay requirements of the flows. The approach allows the use of a GTS by the nodes in a multiple way, ensuring that they always meet delay and bandwidth requirements. In [25] an algorithm is shown for admission control that allows to decide whether to accept a new assignment request GTS. This algorithm is not only based on the remaining time interval, but also on traffic flows specifications, on admissible delay and available bandwidth resources. This approach improves the bandwidth allocation mechanism of the IEEE 802.15.4 standard protocol. The GTS allocation concept is similar to the Time Division Multiplex Access (TDMA). Some reserved bandwidth is periodically guaranteed for a specific data flow. The bandwidth is determined taking into account the time window duration and its periodicity. However, the GTS mechanism is more flexible than the classical TDMA since the GTS duration can be dynamically adjusted by appropriately setting the superframe parameters of IEEE 802.15.4, while a TDMA slot has a time duration generally fixed for a given network configuration. Furthermore, the TDMA and the IEEE 802.15.4 MAC layer differ in several aspects. In other words, the IEEE 802.15.4 presents more advantages than TDMA in WNs applications. The scalability is the most significant limitation of the TDMA-based approach, since the number of nodes in a TDMA cluster must be kept as low as possible. This prevents its use in WNs, while the IEEE 802.15.4 could manage up to 254 nodes in a cluster. Another problem of TDMA is the lack of support for dynamic network topology changes (e.g., node failure, a new node enters inside the network, mobility), since in the TDMA the network configuration must be readapted each time the topology changes. Moreover, communications in TDMA-based networks are quite dependent on the cluster manager. If this node fails, the underlying sensor nodes will be disconnected from the entire network. This is not the case of IEEE 802.15.4, because the protocol can work with or without a central manager, and it is designed to be easily adapted to different network topologies. The performance of the IEEE 802.15.4 protocol has been subject of several research studies, focused mainly on CSMA/CA performance (Carrier Sense Multiple Access with Collision Avoidance) [26, 27] also using simulations [28]. In recent years, researchers focused on real-time systems and Quality of Service (QoS) problems in WNs. An overview of these challenges is presented in [29]. An example of TDMA adaptation is extensively discussed in [30]. In this work, an optimization method for dynamic sharing of time slots has been proposed. However, this protocol is based on the next node detection through a planned exchange of information. As a consequence, this method produces a considerable overhead. Another variant of adaptive TDMA is shown in [31] where the management of virtual time slots for control messages is based on CSMA. Some existing hybrid protocols make a distinction between the contention access period (CAP) and contention free period (CFP) to avoid collisions. However, reservation request for a GTS can be made through a message in the CAP using the CMSA/CA. Consequently, the reservation request depends on the use of the current channel and can be delayed for a time interval unknown.
2.2. Techniques to Support Real-Time Transmission over Bluetooth
The BT Master/Slave (
3. WNs-Based Solutions for Real-Time Networks
3.1. Deadline-Aware Scheduling Techniques in Wireless Networks
In this paper, we propose a deadline-aware scheduling for both periodic and aperiodic/sporadic traffic flows. Periodic flows (each one with a period


This equation can also be used in this context where, obviously, we will have a nonpreemptive scheduling.
In the literature the CBS is defined through two parameters: the period




Theorem 1.
A system can schedule a set of periodic requests, using non-preemptive EDF algorithm, if Jeffay's conditions ((8) and (9)) are met as follows:


The periodic traffic flows are represented by a set of periodic variables
Equation (8) relates to system utilization (in terms of bandwidth, as we are dealing with the transmission of packets), whereas (9) refers to the system demand. Equation (8) defines that total bandwidth utilization must not exceed 1;
3.2. EDF + CBS in IEEE 802.15.4
In IEEE 802.15.4 networks, the CBS can be implemented, for example, by choosing to use the solution proposed by Collotta et al. [23]. As mentioned in Section 2, the authors propose a solution, called i-GAME, where multiple nodes can share a GTS. In this case, the nodes which transmit aperiodic/sporadic traffic flows will use the GTSs sharing technique described in [24], which involves the use of a GTS by multiple nodes guaranteeing, to each one, the satisfaction of real-time constraints. So, in our approach, a message has the highest priority if its deadline is the closest among all those relating to messages ready to be transmitted. In this way, the message transmitted is always the one with more imminent deadline. In order to guarantee messages schedulability, following the Jeffay's conditions and the EDF algorithm, the total utilization factor for periodic traffic flows must be


3.3. EDF + CBS in Bluetooth
The approach consists of two scheduling levels. The first level is the local scheduling that it is carried out in the local queues of each BT device. In order to manage real-time traffic, we assume that in the local scheduling each device is managed by EDF. The second level, intrapiconet scheduling, refers to deadline-aware scheduling policies adopted inside the piconet, by the Master node. As in a typical industrial communication scenario, we assume that traffic exchanges are known a priori. On the contrary, regarding to the aperiodic traffic, we consider a signaling scheme where the Slaves send the status of their queue to the Master through a specific packet field. For simplicity we assume that each Slave transmits an aperiodic variable and a periodic variable, with fixed period and deadline equal to the period. In addition, each Slave manages different queues for aperiodic and periodic variables. However, our assumption is not mandatory since it could be possible to implement several distinct traffic classes if several different periodic and aperiodic variables are produced by each Slave. In addition, it is possible to use an







Parallel
4. Performance Evaluation
In order to validate benefits introduced by the use of EDF + CBS deadline-aware scheduling in IEEE 802.15.4 and Bluetooth, several simulations have been carried out. Regarding IEEE 802.15.4, the simulations have been conducted using OMNet++ [38] considering a star topology consisting of a First Pan Coordinator (FPC) and seven end devices (RFD), as shown in Figure 5. The same topology has been used for measurements concerning a Bluetooth network (a master and seven slaves). In this case, simulations have been carried out through the ucbt extention of NS-2 simulator [39]. In both cases, the Throughput/Workload percentage, the deadline miss ratio, and delays related to both periodic and aperiodic flows have been measured considering packet

Network topology simulation scenario.
4.1. Performance Evaluation in an IEEE 802.15.4 Network
Figure 6 shows IEEE 802.15.4 network performance in terms of TH/WL ratio percentage for both periodic and aperiodic packets. As it is possible to see, the proposed approach produces a great improvement. The TH/WL ratio of periodic flows reaches 82.5% while the standard reaches 61.8%. Aperiodic flows reach 11.5% using

TH/WL—IEEE 802.15.4 Standard versus IEEE 802.15.4
Figure 7 shows IEEE 802.15.4 network performance in terms of Deadline Miss ratio percentage for both periodic and aperiodic packets. In this case the proposed approach produces a reduction in terms of deadline miss. During simulations, 4.1% has been measured for periodic flows against 6.9% measured in case of standard protocol. Even in case of aperiodic traffic flows a reduction of deadline miss ratio has been measured (1.9% versus 3.1%).

Deadline Miss ratio—IEEE 802.15.4 Standard versus IEEE 802.15.4
Figures 8 and 9 show IEEE 802.15.4 network performance in terms of average delay of periodic and aperiodic packets, respectively. In x-axis, the packets sent percentage is represented while the y-axis measures the average delay in ms. Even these measures demonstrate benefits of the
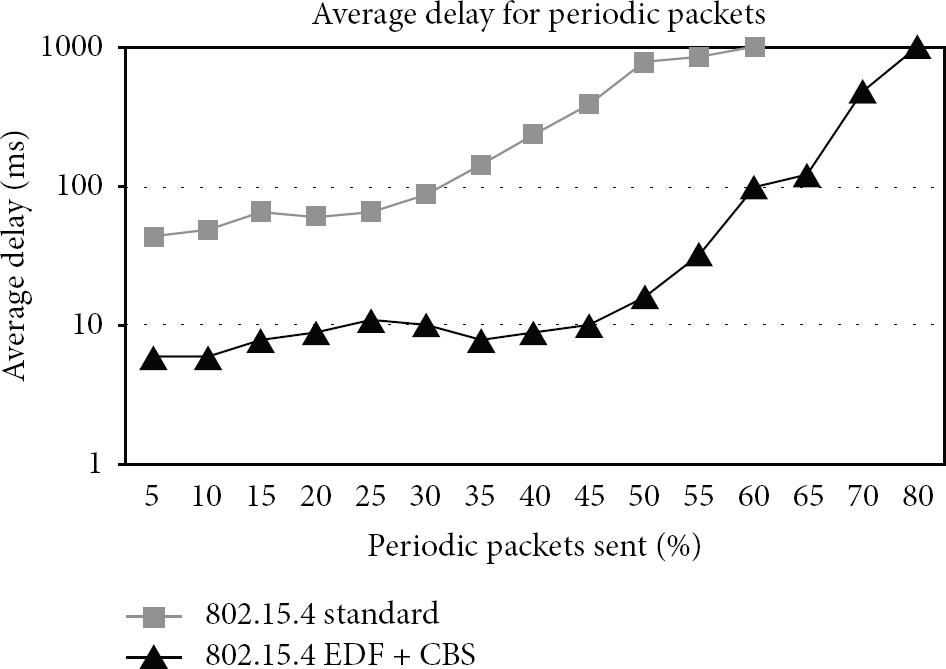
Average delay for periodic packets—IEEE 802.15.4 Standard versus IEEE 802.15.4
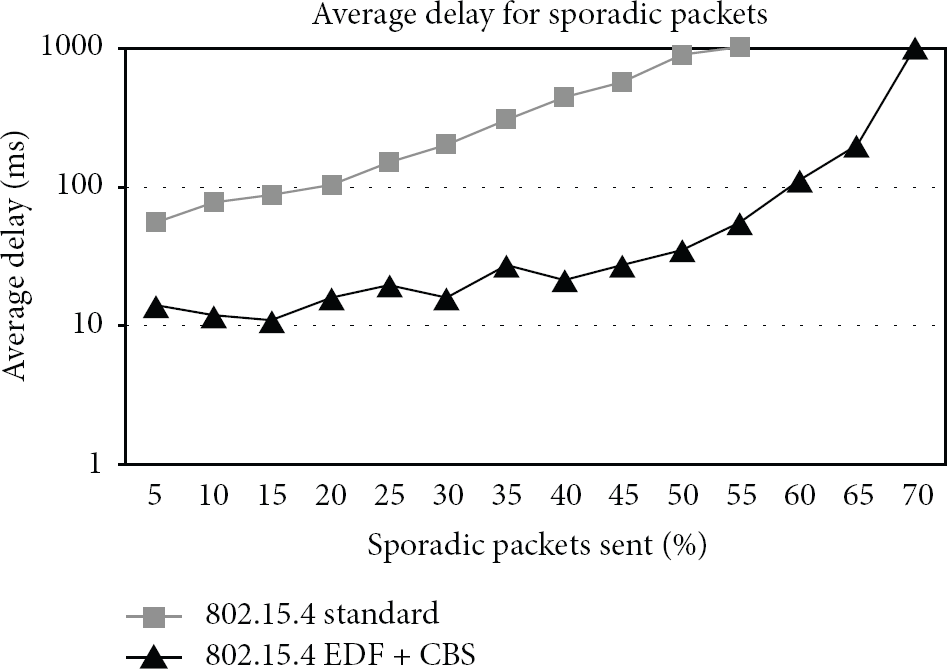
Average delay for aperiodic/sporadic packets—IEEE 802.15.4 Standard versus IEEE 802.15.4
4.2. Performance Evaluation in a Bluetooth Network
Bluetooth network performance, in terms of TH/WL ratio percentage for both periodic and aperiodic packets, is shown in Figure 10. Even in this case, there are great improvements through the proposed approach. Measured TH/WL of periodic flows is 74.8% using

TH/WL—Bluetooth Standard versus Bluetooth
Figure 11 shows Bluetooth network performance in terms of Deadline Miss ratio percentage for both periodic and aperiodic packets. Even in this case there is a deadline miss reduction using the proposed approach. A Deadline Miss ratio of 6.4% has been measured for periodic flows using the proposed approach while the standard protocol produces a value of 9.3%. Regarding aperiodic traffic flows, Figure 11 shows a Deadline Miss ratio reduction using our approach (2.1%) compared to the standard protocol (2.7%).
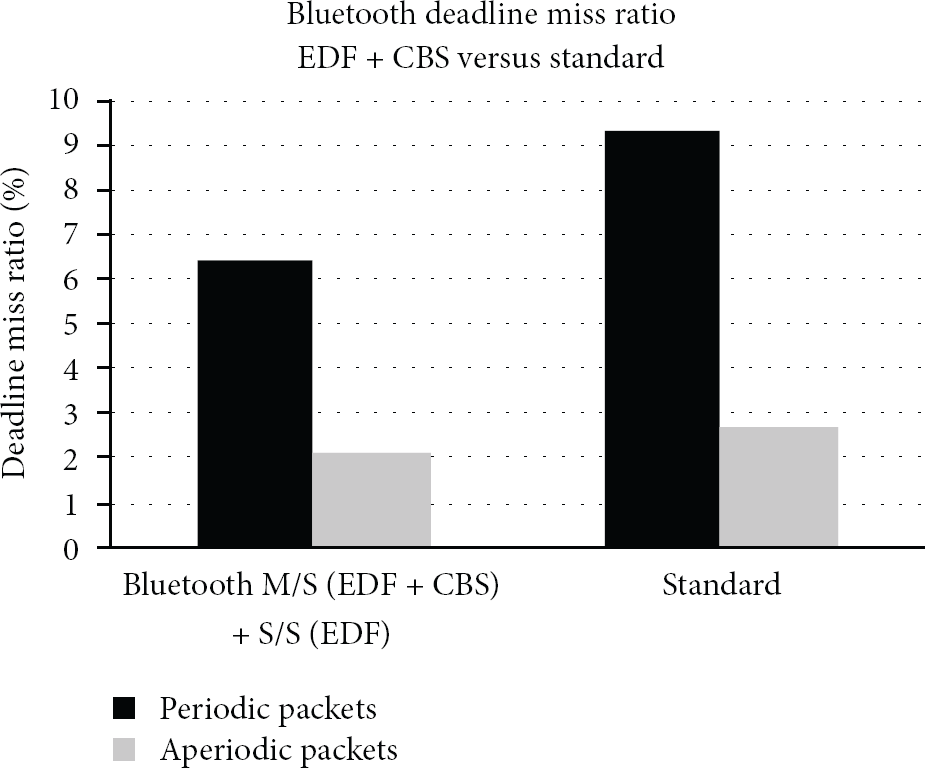
Deadline Miss ratio—Bluetooth Standard versus Bluetooth
Figures 12 and 13 show Bluetooth network performance in terms of average delay of periodic and aperiodic packets, respectively. Even in this case, results show benefits of the proposed approach. In fact, the delay measured is on average 292.16 ms lower than the standard protocol in terms of periodic traffic flows. The delay of aperiodic traffic flows is, instead, on average 308.80 ms lower than the standard.

Average delay for periodic packets—Bluetooth Standard versus Bluetooth

Average delay for aperiodic/sporadic packets—Bluetooth Standard versus Bluetooth
4.3. Performance Comparison between IEEE 802.15.4 and Bluetooth
In order to provide a comparison between IEEE 802.15.4 and Bluetooth solutions, performance obtained has been compared. Previously, we demonstrated that a deadline-aware solution improves performance of the standard protocol. Now, we want to summarize obtained results in order to determine the best solution for soft real-time applications. Figure 14 shows a comparison between results obtained in IEEE 802.15.4 and Bluetooth, respectively. In an IEEE 802.15.4 network, the proposed approach produces better performance. Periodic TH/WL percentage measured is 82.5% against 74.8% measured in a Bluetooth scenario.
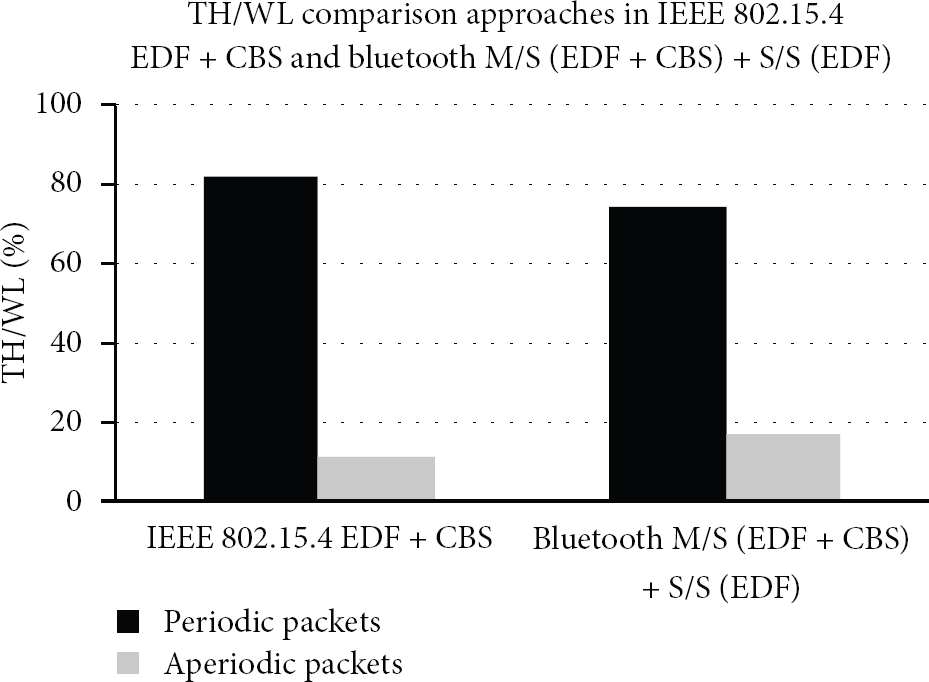
TH/WL—IEEE 802.15.4
Figure 15 shows deadline miss ratio results in IEEE 802.15.4 and Bluetooth, respectively. In an IEEE 802.15.4 network, we measured less deadline miss percentage than Bluetooth for both periodic (4.1% versus 6.4%) and aperiodic traffic flows (1.9% versus 2.1%).

Deadline Miss ratio—IEEE 802.15.4
Figures 16 and 17 finally show average delay for periodic and aperiodic packets, respectively. It is possible to see that Bluetooth produces on average a delay of 30.26 ms lower than IEEE 802.15.4 in case of periodic traffic flows while, in case of aperiodic traffic flows, the estimated delay is on average 19.10 ms lower using a Bluetooth network.

Average delay for periodic packets—IEEE 802.15.4
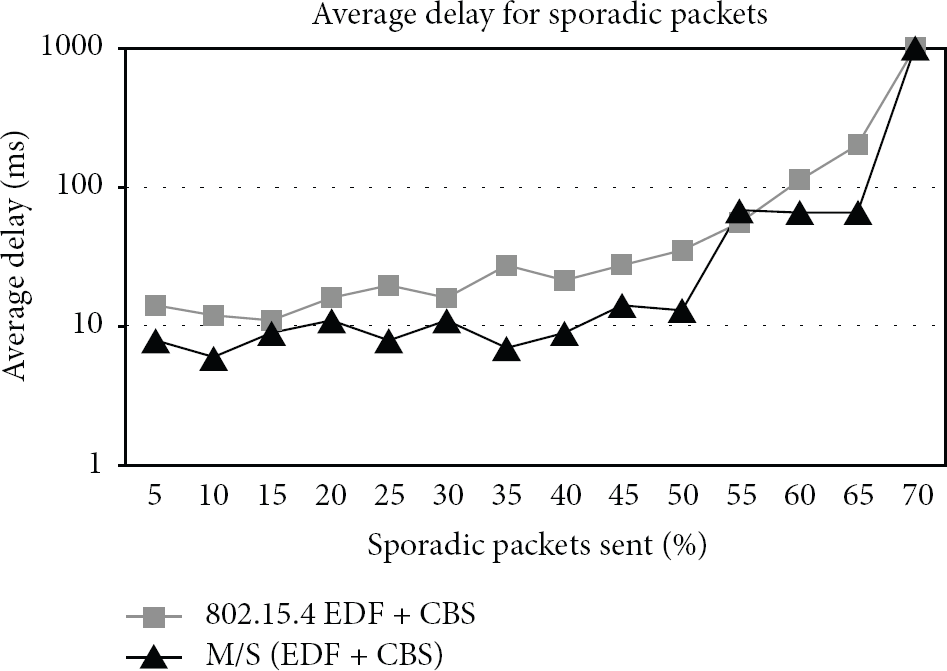
Average delay for aperiodic/sporadic packets—IEEE 802.15.4
5. Conclusions
In this paper, a real-time scheduling algorithm, for both periodic and aperiodic traffic management, applied to networks based on IEEE 802.15.4 and Bluetooth, respectively, has been presented. The main aim of this work is to reduce, as much as possible, the packet loss on the wireless channel increasing, at the same time, the reliability of the wireless technology in terms of TH/WL ratio and average delay. Furthermore, a comparison between the IEEE 802.15.4 and Bluetooth solutions has been conducted in order to identify the more suitable communication protocol for industrial process control systems. As shown, our approach improves performance of both IEEE 802.15.4 and Bluetooth standards. Moreover, the simulation campaign clearly demonstrates that the combinated use of EDF (for periodic traffic flows management) and CBS (per aperiodic traffic flows management) determines more enhancements in IEEE 802.15.4 than Bluetooth. In fact, the TH/WL percentage of periodic flows measured in a IEEE 802.15.4 network is 82.5% against 74.8% measured in a Bluetooth scenario. Similarly, better performance has been obtained in terms of deadline miss ratio for both periodic (4.1% versus 6.4%) and aperiodic (1.9% versus 2.1%) flows. Instead, as previously shown in Section 4, in terms of average delay measured, our approach produces better performance using Bluetooth than IEEE 802.15.4. The measured delay of periodic traffic flows in Bluetooth is 30.26 ms lower than IEEE 802.15.4 while, in case of aperiodic traffic flows, the estimated delay in Bluetooth is on average 19.10 ms lower than IEEE 802.15.4. In conclusion, in applications where the main requirement is to have low packet loss reducing, at the same time, the deadline miss, it is preferable to use IEEE 802.15.4. On the contrary, in applications where it is important to ensure low network communication latencies, it is preferable to use Bluetooth.