
Abstract
For a reusable space vehicle or a missile, the shape of the nose cone has a significant effect on the drag of the vehicle. In this paper, the concept of morphing nose cone is proposed to reduce the drag when the reentry vehicle flies back into the atmosphere. The conceptual design of the structure of morphing nose cone is conducted. Mechanical design and optimization approach are developed by employing genetic algorithm to find the optimal geometric parameters of the morphing structure. An example is analyzed by using the proposed method. The results show that optimal solution supplies the minimum position error. The concept of morphing nose cone will provide a novel way for the drag reduction of reentry vehicle. The proposed method could be practically used for the design and optimization of the deployable structure of morphing nose cone.
1. Introduction
For a reusable space vehicle or a missile, the nose cone is ejected in the upper parts of the atmosphere. The shape of the nose cone has a significant effect on the drag of the vehicle [1]. Moreover, the temperature of the nose cone caused by aerodynamic heating is about 2000 to 3000 centigrade for reentry vehicles [2] and tactical missiles [3, 4]. Therefore, among a number of design requirements, the reduction of both drag and aerodynamic heating is the major challenge in the design of these supersonic and hypersonic vehicles [5]. So the shape optimization plays an important role in the design of nose cone.
Numerous studies on the design and optimization of the shape of nose cone have been carried out. Ledu and Pollak [6] gave an extensive series of flight tests of a blunt-nosed flare-stabilized re-entry nose cone and deduced drag and stability coefficients. Ericsson et al. [7, 8] discussed combined effects of nose bluntness and cone angle on dynamic stability of the nose cone and provided some useful suggestions on missile design. Deepak et al. [1] described a unique process of shape optimization for drag reduction for the nose cone of hypersonic flight experiments. Lin et al. [9] provided an investigation to determine the optimum nose shape and frustum configuration in an effort to improve reentry vehicle performance. The literature mentioned perviously provided valuable reference for the studies to reduce the drag and aerodynamic heating.
After that, there have been a variety of papers devoted to reducing both the drag and the aeroheating by modifying the flow field ahead of the vehicle's nose [5]. Of these techniques, using spikes is the simplest and the most reliable technique. Gauer and Paull [10] numerically investigated the drag and the heat-transfer reduction of a forward-facing spike with varying length and shape in comparison to the unspiked nose cone. Ahmed and Qin [11] compared the spike and aerodisk with the unspiked nose cone and researched a mechanism to explain the drag reduction and the cause of flow instability based on the shape of an effective body. Marley and Riggins [12] investigated methods for increasing the stability of forward mass injection and presented drag reduction technologies including annular (ring) and swirled injection both with and without upstream energy deposition.
Besides, much research on new techniques for drag reduction has been developed. The breathing blunt nose [13] is proposed to reduce the pressure drag of blunt-nosed body by passive control at a supersonic Mach number. The side force of a slender body flight vehicle with chine nose at high angles of attack has been studied by Lim et al. [14], and the chine nose shape with chine edge on its both sides is considered for the method to reduce side force.
Although lots of efforts have been made in reducing the drag and the aerodynamic heating of the nose cone, there are still some limitations for re-entry vehicles, of which the drag and aerodynamic heating is varied with the flight phase.
Morphing technology on aircraft and spacecraft has found increased interest over the past 30 years because it is likely to enhance performance and efficiency over a wider range of flight conditions [15, 16]. NASA had started the Aircraft Morphing Program to develop and mature smart component technologies for advanced airframe systems that can be embedded in aircraft structures and provide cost effective system benefits [17]. During these years, a hot issue of morphing technology is morphing wing for which numerous studies have been carried out. Lampani et al. [15, 16] proposed a concept of smart thermal protection system for morphing leading edge. Inoyama et al. [18, 19] present a topology optimization methodology for determining multiple configuration for morphing wing structure. Courchesne et al. [20] studied the configurations of morphing wing by use of shape memory alloys actuators. However, the literature survey indicates that morphing nose cone has not been noticed and reported until now.
The term conceptual design is a type of work which gives precedence to hypothetical function. Many approaches are researched for realizing conceptual design. For example, Cao et al. [21, 22] presented a port-based ontology modeling method to support product conceptualization. Taking the conceptual design of aircraft as an example, the goal is to generate one or more aircraft concepts which will meet the design specifications. And the aircraft concept includes the aircraft configuration and its primary dimensions. Raymer [23] expatiated the entire process of aircraft conceptual design and Rentema [24] presented the issues that should be distinguished, such as the configuration layout, the lift curves, and drag polars, accompanied with some necessary demonstration quantitively ensuring the feasibility of accessories.
In this paper, the conceptual design of morphing nose cone is proposed. The morphing nose cone has deformable shape in different flight phases. It is blunt when the re-entry flies out of the atmosphere, whereas it deforms into a sharper cone to reduce the drag when it flies back into the atmosphere. Furthermore, the conceptual design and optimization method will be developed according to the morphing process and the design procedure of the morphing nose cone will be expatiated.
This paper is organized as follows. In Section 2, the shape representation of the nose cone is given. In Section 3, the conceptual design of morphing nose cone is presented. The optimization method based on genetic algorithm and the optimal result are proposed in Section 4. A numerical example is presented to explain how the optimization method works. Finally, the method for design and optimization of the morphing nose cone is summarized in the last section.
2. Shape Representation of the Nose Cone
The shape of nose cones can be described as conical, biconic, power series, ogival, elliptical, and Parabolic [9, 25]. The equations describing the various nose cone shapes are expatiated in [3]. In this paper, the ogival nose cone with spherically blunted forebody is considered because it is most commonly used on space vehicle.
The 2D shape of spherically blunted ogival nose cone is shown in Figure 1, where L is the overall length of the nose cone, R is the radius of the base of the nose cone, and y is the radius at any point x, as x varies from the principle tip of the nose cone (O) to the base (B). The principle tip is blunted by capping it with a segment of a sphere, whose radius is r n . Thus, the real tip becomes A. The arc BC is a segment of a circle, of which the radius is ρ, such that the curve of the nose cone is tangent to the rocket body at its base at C and the spherical cap at P.

Shape of spherically blunted nose cone.
For the ogival nose cone, the coordinates of tangency point P are

where the radius ρ can be calculated by

The center of the spherical cap is located at

Thus, the profile of the nose cone can be expressed as

3. Conceptual Design of Morphing Nose Cone
For the morphing nose cone, the spherical cap is nondeformable, whereas the curvature of the deformable ogive is varied with the changes of aerodynamic load. For a re-entry vehicle, the morphing principle of the nose cone is shown in Figure 2. To reduce the drag, the total length of the nose cone is increased by 20% or more (Δx ≥ 0.2L) so that the cone angle gets smaller, whereas the curvature radius of the ogive is enlarged after morphing.

Morphing principle of nose cone.
As far as it is concerned, the design of morphing nose cone is made via three main processes in general, the conceptual design, integrated design, and detailed design, as shown in Figure 3. In conceptual design, the most adaptive mechanism to complete the task of morphing is proposed to make sure it could be used without motion interference and satisfy the requirement of kinematic accuracy.

The whole process of morphing nose cone design.
Considering the morphing principle of nose cone, the mechanism composed of several slider-crank units each of which has 2 links and a slider is selected as the inner deployable structure. Figure 4 represents the deformable mechanism of the morphing nose cone graphically, where the notations A i , B i , and C i (i = 1,2 … n) represent the points on the mechanism which holds the blunt nose cone and A i ′, B i ′, and C i ′ (i = 1,2 … n) belong to the sharp nose cone mechanism; C i and C i ′ (i = 1,2 … n) are directly connected to the key points on the original and final surface of the morphing nose cone, respectively; O is the origin of coordinates xoy; A i and A i ′ (i = 1,2 … n) are located in the x-axis. As the slider translates from Ai + 1 to Ai + 1′, the key points C i move to C i ′ so that the profile of the nose cone changes from the blunt one to the sharp one.
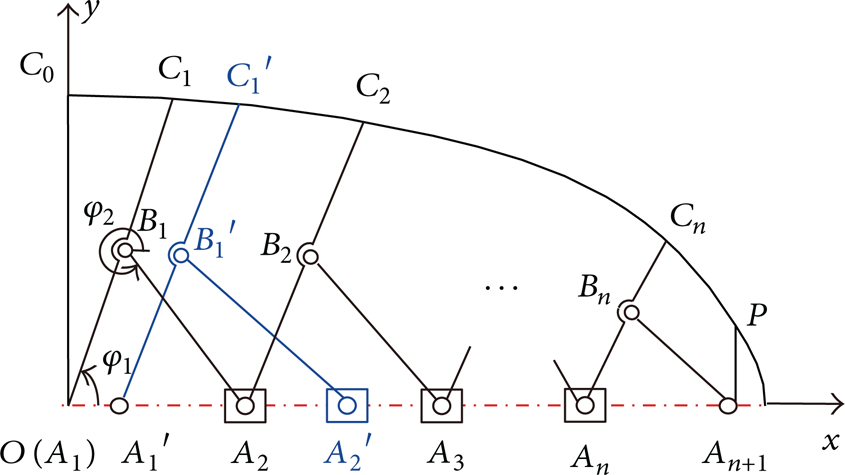
Mechanism of the morphing nose cone.
4. Optimal Design of the Structure Using Genetic Algorithm
4.1. Overall Process of Optimal Design
With respect to the morphing principle of morphing nose cone, the general structure can be preliminary designed. Considering the coordination of deformation mechanism, the movement of key points on the skin should be appropriate, which means that the units of the deployable mechanism should be distributed uniformly.
On the one hand, the solution of the first slider-crank elements can be calculated according to the theory of mechanism. But, if the same method is applied to calculate the other elements, the configuration of the whole mechanism may lead to an infeasible solution with unreasonable links and pressure angles. Therefore, optimization of the mechanism is needed. On the other hand, the optimal design of morphing nose cone is an optimization problem with a single objective and multiparameters which has complex relations between the input and output. The optimal solution can be rapidly obtained with good initial parameters. Consequently, the solution of the first slider-crank elements is used as initial parameters and the other elements are calculated through optimization.
Genetic algorithm (GA) is selected in this paper as the tool to get the optimal solution for the reasons listed as follows. Firstly, it should be noted that this is probably an optimization problem with a single objective and multiparameters which has complex relations between the input and output, so GA can be employed to get the optimal solution. Secondly, GA can rapidly locate good solutions, even for large search spaces. The same is of course also true for evolution strategies and evolutionary programming. The amount of calculation is related to the initial parameters. The optimal solution can be easily obtained by GA if adaptive initial parameters are precalculated. With respect to our problem, the range of some initial parameters, which will produce a global optimization solution very rapidly, can be determined by the engineering requirements and empirical information. Thirdly, solving the equations is the main topic of optimization which consumes large computing resources. Fortunately, GA will not join in the equation solving, so it saves a lot of time. Moreover, GA has more concise mathematical descriptions which can be easily applied in our research. Therefore, GA is applied in this paper to get the optimal solution.
To sum up, the overall process of optimization is conducted in two procedures: (1) calculation of the first slider-crank unit and (2) optimization of other units of the mechanism using GA.
4.2. Calculation of the First Slider-Crank Unit
As shown in Figure 4, considering the first unit A1B1C1A2, A1 is the origin of the coordinate xoy, A2 is on the slider which moves along the x axis, and C1 and C1′ are key points on the original and final profiles.
For the original mechanism, the equations of the first slider-crank unit are

where
For the morphed mechanism, the origin of the first slider-crank unit moves from A1 to A1′; thus the equations are
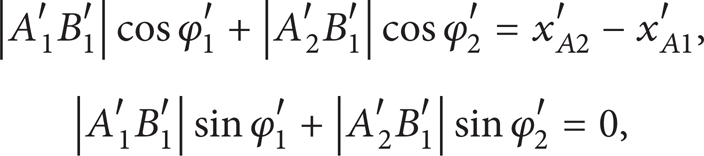
where
Because the points C1 and C1′ belong to the profiles, the coordinates (xC1, yC1) and (xC1′, yC1′) can be selected according to the profiles. Combining the equations of original and final units,

Flowchart of the calculation method.
The calculation method for the first slider-crank unit of the morphing nose cone mechanism can be recapitulated in three steps as follows.
Select a point C1(xC1, yC1) on the original profile and compute
Given the position of A1′ and A2,
Changing C1 on the profile, several solutions can be obtained. The optimal solution is selected based on the constraint condition; namely, B1 is near the middle of the link A1C1 to improve its stability.
4.3. Optimization of Other Units
After the first slider-crank unit is solved, the optimization of other units of the mechanism can be conducted using GA [26]. The flowchart of the optimization process by GA is illustrated in Figure 6. The input is the original and final curve functions of morphing nose cone, and the output is the best sample of morphing mechanism with minimum position error, corresponding to the optimal length of the links. The objective function minimizes the position error of the key points between the kinematic and final profile of configuration. The GA program firstly sets the total generation i g and the population scale determines the iteration times and the scale of samples respectively. Then the samples are generated by the random function via uniform distribution. The output position error can be calculated by solving the kinematic equations. After genetic selection, cross, and metamorphosis, one can get the best sample in one generation. Repeating the genetic selection, cross, and metamorphosis for i g generations, the minimum position error can be obtained as the best sample shown at the bottom of Figure 6.

Flowchart of optimization design of the nose cone.
The output of GA program is the scales n i (i = 2,3, … n) of the mechanism units, where n is the number of the units. The proportional indexes S i are defined as

Suppose the elongation contributed by the mechanism is proportional to the indexes S
i
. As a result, the length of all the links can be derived from the first slider-crank unit and S
i
proportionally. Then the geometric analysis provides key points (
Therefore, the objective function of optimization can be expressed as

where
5. Numerical Example
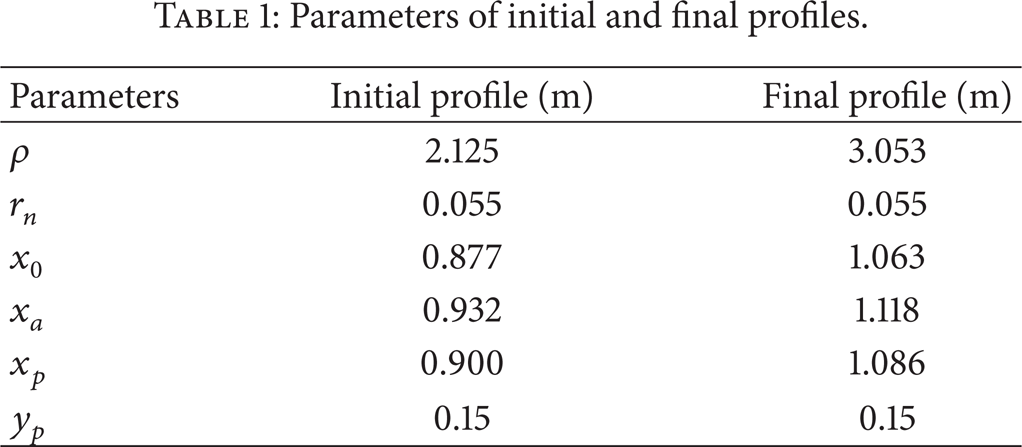
A numerical example is studied to discuss the effect and feasibility of the optimization method. Refer to Figure 1; suppose that L = 1 m and R = 0.25 m before morphing, whereas the real length of the nose cone increases from x a to 1.2x a . The curvature radius of the egive and the other key parameters are calculated by (1)–(3). The parameters of initial and morphing profiles are listed in Table 1.
Parameters of initial and final profiles.
The functions of the original and final profiles are

Figure 7 sketches the position errors of different generations in optimization process by GA and the best sample of S i is shown in Table 2. It can be concluded from Figure 7 that the error decreases and converges to an optimal solution which supplies the minimum value after 500 generations. The position error may get to 28.4369 mm in the first generation and after 500 generations the error is confined to a lower stage about 28.1150 mm.
Optimal solution by GA.

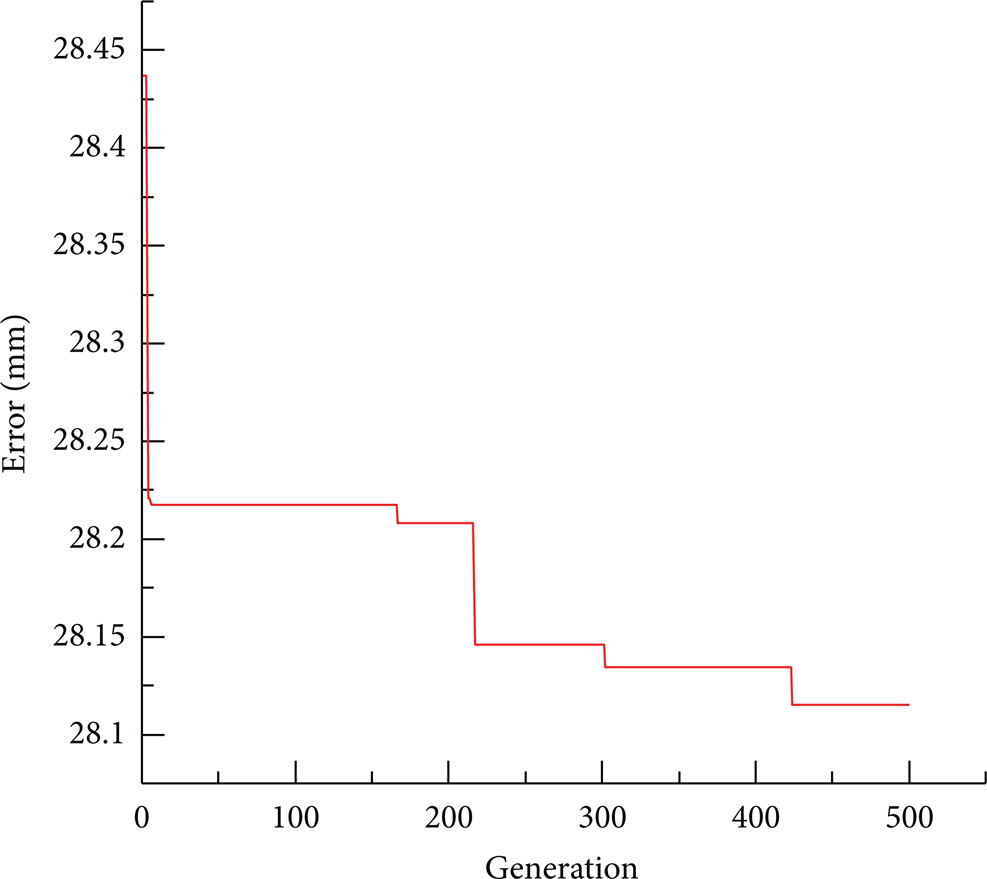
Errors in the generations.
The optimal solution of the links is listed in Table 2. According to the optimization results, The 3D model of the morphing nose cone before and after morphing is present in Figures 8 (a) and 8 (b), respectively. The mechanism morphs from Figure 8 (a) to Figure 8 (b) under the drive, whereas the shape of the nose cone changes from blunt body to a sharper one.

3D models of the morphing nose cone: (a) before morphing and (b) after morphing.
6. Conclusions
This paper proposed the concept of morphing nose cone to reduce the drag when the re-entry vehicle flies back into the atmosphere. The range of conceptual design is defined and the optimization method of morphing nose cone is conducted. Mechanical design is conducted to obtain the initial mechanism that can be used in the further optimization. The optimization approach for the mechanism of morphing nose cone is developed to find the optimal geometric parameters of the morphing structure by employing genetic algorithm into the calculation. An example is provided by using the proposed method to verify the effect of the design and optimization method. The results show that optimal solution supplies the minimum error. The concept of morphing nose cone will provide a novel way for the drag reduction of re-entry vehicle. The proposed method could be practically used for the design and optimization of the morphing nose cone of the re-entry vehicles in the future.
Future work will be focused on the aerodynamic analysis and the wind tunnel test of the morphing nose cone to study its aerodynamic performance.
Footnotes
Acknowledgments
This work was supported by the National Science Foundation of China under Contract no. 11072123, the Major State Basic Research Development Program of China (973 Program), and the Project sponsored by SRF for ROCS, SEM.