
Abstract
This paper presents an intelligent motion controller for four-wheeled holonomic mobile robots with four driving omnidirectional wheels equally spaced at 90 degrees from one another by using field-programmable gate array (FPGA)-based artificial immune system (AIS) algorithm. Both the nature-inspired AIS computational approach and motion controller are implemented in one FPGA chip to address the optimal control problem of real-world mobile robotics application. The proposed FPGA-based AIS method takes the advantages of artificial intelligence and FPGA technology by using system-on-a-programmable chip (SoPC) methodology. Experimental results are conducted to show the effectiveness and merit of the proposed FPGA-based AIS intelligent motion controller for four-wheeled omnidirectional mobile robots. This FPGA-based AIS autotuning intelligent controller outperforms the conventional nonoptimal controllers, the genetic algorithm (GA) controller, and the particle swarm optimization (PSO) controller.
1. Introduction
In the last few years, holonomic mobile robots with omnidirectional driving capability have attracted much attention in both mechanical engineering and electrical engineering. Such robots are superior to those with differential wheels in terms of dexterity and locomotion mechanism [1–5]. Comparing with the car-like robots [6–8], this type of omnidirectional mobile mechanism takes the advantages in maneuverability and effectiveness to move in any direction at any time [1–5].
Modeling and control of holonomic four-wheeled omnidirectional mobile robots have been investigated by several researchers [9–13]. In particular, Byun et al. [10] constructed an omnidirectional mobile robot with a variable wheel arrangement mechanism. Purwin and D'Andrea [11] proposed the trajectory generation for four wheeled omnidirectional vehicles. Shing et al. [12] proposed a T-S fuzzy path controller design for an omnidirectional mobile robot. The dynamic model and fuzzy controller for an omnidirectional surveillance robot were presented in [13]. Moreover, Tsai et al. [14] presented a dynamic model to achieve adaptive motion control. However, none of the above studies coped with the control parameter optimization problems, namely, that the control parameters in their proposed controllers are poorly tuned or determined by an ineffective trial-and-error approach.
Artificial intelligence (AI) is a set of nature-inspired computational methodologies for solving the optimization problems in a wide variety of real-world applications [15–26]. Among these modern metaheuristic-based approaches to address the optimization problems in mobile robots, AIS algorithm inspired by the biological immune system is introduced by de Castro and Timmis [15] and has emerged as a highly effective and efficient computational paradigm to NP-hard combinatorial optimization problems. Its model is directly related to the natural immune response. The biological immune system is a complex system of specialized cells that has evolved to protect the body against attacks from outside invaders such as bacteria, viruses, fungi, and parasites in biological world [15–20]. The specific immune cells, called antibodies, are produced to recognize the foreign antigens and then kill them in the adaptive immune response. The antibodies (optimal solution) with highest affinity are evolved via the AIS algorithm to solve the optimization problems (antigens).
The adaptive and robust AIS algorithms have been successfully applied in many disciplines by exploiting their strong optimization ability [15–20], such as machine learning, classification, data analysis, optimization, and pattern recognition. Zhang and Xin [16] presented an immune algorithm with adaptive sampling in noisy environments and its application to stochastic optimization problems. Chen and You [17] proposed an immune algorithms-based approach for redundant reliability problems with multiple component choices. Tsai and Chou [18] presented the design of optimal digital IIR filters by using an improved immune algorithm. Lin and Chen [19] presented the parameter tuning, feature selection, and weight assignment of features for case-based reasoning by artificial immune system. Kim [20] developed an intelligent tuning method of 2-DOF (degree of freedom) proportional-integral-derivative (PID) controller by immune algorithm. Unfortunately, these studies did not address the AIS-based intelligent motion control problem of holonomic mobile robots. Moreover, these personal computer (PC)-based and workstation-based AISs suffer from their high cost and software implementation so that they are not suitable for real-time robotics applications. This disadvantage of the PC-based algorithms can be circumvented by using the SoPC hardware/software codesign technology in FPGA chip [27–30].
FPGA technology has been bringing a major revolution in the design of integrated circuits and has been emerging as a new paradigm for AI computing. It has been shown as an efficient and powerful means to realize the sophisticated algorithms in many disciplines, such as fuzzy controller design [27], speech recognition [28], neural network controller design [29], and positioning algorithm [30]. With the benefits of flexibility, hardware/software codesign, and IP (intellectual property) reusability, this FPGA computing has been shown useful to design computational intelligence in embedded applications which contains memory, custom logics, and processor cores [27–30]. However, there has been no attempt to designing an intelligent FPGA-based AIS motion controller for holonomic mobile robots.
The objective of this paper is to design a pragmatic FPGA-based intelligent AIS motion controller for four-wheeled omnidirectional mobile robots to achieve both trajectory tracking and stabilization. With the kinematic model of the omnidirectional mobile robot, the unified control law is proposed. Moreover, the control parameters are then optimized by using the proposed AIS algorithm, thereby improving the control performance. Finally, the AIS computational approach is realized in FPGA to efficiently construct an experimental holonomic four-wheeled mobile robot.
The rest of this paper is organized as follows. In Section 2, the kinematic control law is proposed to achieve stabilization and trajectory tracking for the four-wheeled holonomic mobile robots. Section 3 elaborates the AIS algorithm and its application to control parameter tuning. Section 4 presents the FPGA implementation of the AIS computational paradigm to motion controller. Section 5 conducts experimental results to show the performance and merit of the proposed methods. Section 6 concludes this paper.
2. Kinematic Control
This section is devoted to briefly describing the kinematic model of a holonomic omnidirectional mobile robot with four independent driving wheels equally spaced at 90 degrees from one another. With the kinematic model, the unified kinematic controller is proposed to achieve stabilization and trajectory tracking.
2.1. Kinematic Model
Figure 1 depicts the structure and geometry of the four-wheeled holonomic omnidirectional driving configuration with respect to a world frame. Due to structural symmetry, the platform has the property that the center of geometry coincides with the center of mass. What follows describes the kinematic model of this kind of robot, where θ represents the vehicle orientation which is positive in the counterclockwise direction. Note that θ also denotes the angle between the moving frame and the world frame. The kinematic model of the four-wheeled holonomic mobile robot is presented in [9–13]:

where

where r denotes the radius of the driving wheel; L represents the distance from the wheel's center to the center to the geometric center of the mobile platform; υ i (t) and ω i (t), i = 1, 2, 3, 4, respectively, denote the linear and angular velocities of each wheel; [x(t) y(t) θ(t)] T represent the pose of the holonomic mobile robot. Note that although the matrix P(θ(t)) is singular for any θ, its left inverse matrix can be found, that is, P# (θ(t))P(θ(t)) = I, and expressed by

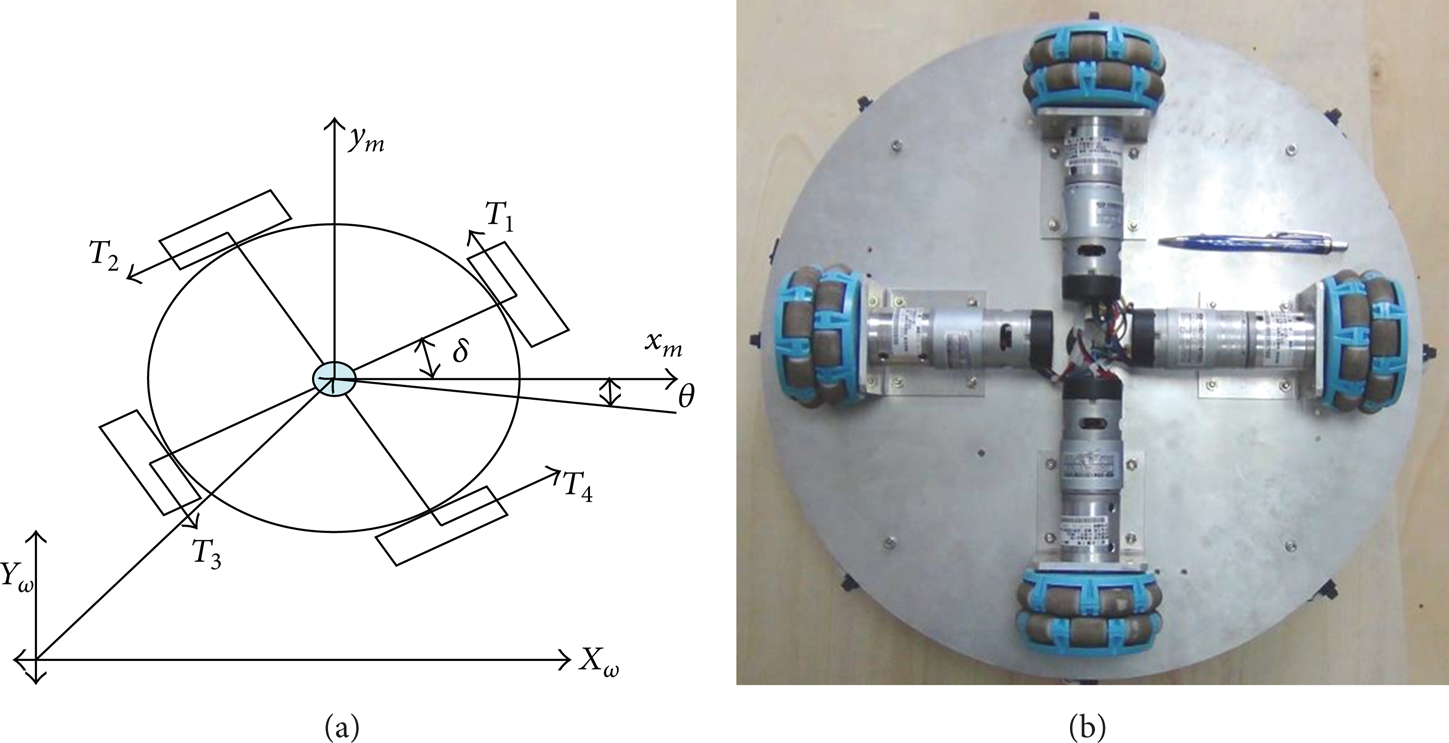
Structure and geometry of the four-wheeled holonomic omnidirectional mobile robot.
2.2. Kinematic Control
With the kinematic model in (1), this subsection is devoted to designing the kinematic controllers to achieve point stabilization and trajectory tracking for the holonomic omnidirectional mobile robot in Figure 1. Furthermore, the unified nonlinear control approach is also presented to simultaneously solve the stabilization and tracking problems in four-wheeled holonomic mobile robots.
2.2.1. Point Stabilization
The control goal of the point stabilization is to find the controlled angular velocity vector [ω1(t) ω2(t) ω3(t) ω4(t)] T to steer the holonomic mobile robot from any starting pose [x0 y0 θ0] T to any desired destination pose Z d = [x d y d θ d ] T . Note that the current pose of the mobile robot is Z1(t) = [x(t) y(t) θ(t)] T . To design the motion controller, one defines the pose error which is the difference between the present pose and the desired destination pose; that is,

which gives
To asymptotically stabilize the control system, the following stabilization law is proposed. Note that the matrices K P and K I are symmetric and positive definite; that is, K P = diag{Kp1, Kp2, Kp3} = K P T > 0, K I = diag{Ki1, Ki2, Ki3} = K I T > 0:

The control system proposed in (6) takes the advantages of PID control theory which is widely used in industrial control systems [20]. Taking (6) into (5), the dynamics of the closed-loop error system becomes

For the asymptotical stability of the closed-loop error system, a radially unbounded Lyapunov function candidate is chosen as follows:

Taking the time derivative of V1(t), one obtains
Since
2.2.2. Trajectory Tracking
This subsection considers the trajectory tracking problem of the holonomic omnidirectional mobile robot. Unlike all nonholonomic conventional mobile robots, the trajectories of the omnidirectional mobile robots cannot be generated using their kinematic models; that is, any smooth and differentiable trajectories for the omnidirectional robots can be arbitrarily planned. Given the smooth and differentiable trajectory Z d (t) = [x d (t) y d (t) θ d (t)] T ∈ C1, one defines the following tracking error vector:

Thus, one obtains
Similarly, the control goal is to find the motors' angular velocities

where the matrices, K P and K I , are symmetric and positive definite. Substituting (12) into (11) leads to the underlying closed-loop error system governed by

Similar to point stabilization, the Lyapunov function candidate can be chosen as (8), and from (9) one can easily prove that the closed-loop error system for trajectory tracking control is asymptotically stable. Worthy of mention is that the point stabilization and trajectory tracking control problems can be simultaneously achieved by the control law (12). The unified control law (12) becomes a point stabilization one if the desired pose [x d (t) y d (t) θ d (t)] T can be either the time-dependent trajectory or the fixed destination posture.
3. AIS Algorithm for Intelligent Motion Control
AIS metaheuristic algorithms evolve improved solutions of the complex combinatorial problem by means of immune system, clonal selection, and hypermutation. Compared to GAs [21–23] and PSOs [24–26] bioinspired metaheuristics, this computational methodology with different evolutionary strategies is relatively new to solving real-world optimization problems in which conventional methodologies are ineffective or infeasible.
In order to evaluate the performance of the antibody, each antibody is assigned an affinity which is predefined in the optimization problem. The AIS antibodies with highest affinity are cloned, hypermutated, and selected, while random antibodies are also generated to improve the diversity of the population [15–20]. Worse antibodies are replaced by better mutated clones. This population evolves by the AIS process until the termination condition is met.
In what follows, the natural immune system is introduced and the core operations of the proposed AIS, such as antibody encoding scheme, affinity computation, clonal selection, and somatic hypermutation, are then presented. Finally, the proposed AIS computational paradigm is applied to design an intelligent motion controller for the holonomic mobile robot.
3.1. Natural Immune System
Biological immune system is a highly evolved, complicated adaptability system, which can identify and eliminate foreign antigenic pathogens to prevent damage to the body. An immune response is the body's reaction to antigens so that the antigens are eliminated [16–18]. The most important function of a biological immune system is to protect living organisms from invading antigens. There are two main types of lymphocytes: T cell and B cell. The T cell matures in the thymus and the B cell matures in the bone marrow. On the surface of T cells and B cells, there are receptor molecules that bind to others. These two cells are different in many aspects in immune system.
An antibody has a Y-shape structure shown in Figure 2. Both arms of the Y-shape consist of two identical heavy and two identical light chains. The tips of the arms are called the variable regions and vary from one antibody to another. The variable regions (paratopes, small segments on antibodies) enable the antibody to match antigen and bind to the epitopes which are small segments on the surface of an antigen. After a binding between an antibody and an antigen's epitope, an antigen-antibody-complex is formed, which results in the deactivation of the antigen [16] shown in Figure 3.

A schematic representation of the antibody.
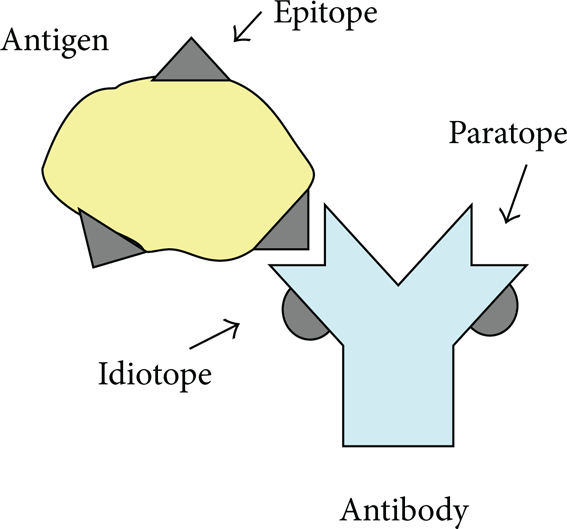
A schematic representation of the antigen-antibody-complex.
When the antigen-antibody-complex binding is made between B cell and antigen, clonal proliferation (clonal selection) on the B cell then takes place and is strengthened by helper T cells. In clonal proliferation, random changes (mutation) are introduced to the genes, such changes will increase the diversity of the antibody. These higher-affinity matured cells are then selected to enter the pool of memory cells. During clonal proliferation two types of cells are generated: plasma cells and memory cells. The function of memory cells is to proliferate to plasma cells for a faster reaction to frequently encountered antigens and produce antibodies for the antigens. A plasma cell is a B cell that produces antibodies. The fittest clones are those which produce antibodies that bind antigen best (with highest affinity).
3.2. AIS Algorithm
3.2.1. Antibody Encoding Scheme
In AIS algorithm, an antibody (solution) is represented by a string of numbers consisting of the parameters in the optimization problems. Notice that the initial population for each antibody is randomly generated. This encoding method shares the similarities with the evolutionary algorithms (EAs), PSO, and GAs.
3.2.2. Affinity Representation and Measurement
Affinity is the fitness value of antibodies in AIS algorithm. Space-shape concept is developed to measure the complementary space between receptor molecules and antigen, thus providing quantitative information of the interactions (degree of binding) of receptor molecules (antibody) and antigens [15]. Based on this space-shape approach, the generalized shapes of antibody (Ab) and antigens (Ag) in AIS algorithm are defined by Ab = {Ab1, Ab2, …, Ab L } and Ag = {Ag1, Ag2, …, Ag L }, respectively.
The Ag-Ab affinity is related to their space distance between antibody strings or vectors. The distance D in the Ag-Ab binding vectors can be defined in Euclidean distance (14). An antibody with higher affinity with antigen and lower affinity with other antibodies is better than others:

3.2.3. Clonal Selection
This process in AIS is the selection of a set of antibodies with the highest affinity with a nonself pattern. The selected antibodies are then cloned in an attempt to have a higher binding affinity with the invading antigens. This reproduction selects high-affinity B cells and removes B cells which do not effectively bind with the invading antigen. The number of clones N c (i) for antibody Ab i from the antibody population is calculated by N c (i) = round (λn/i), where i is the ith highest affinity antibody in the population, n is the number of selected antibodies for cloning, λ is a multiplying factor, and round() is the operator that returns the closest integer.
3.2.4. Somatic Hypermutation
In the proposed AIS, when a B cell is stimulated, a hypermutation mechanism is triggered in the cell's variable region. The mechanism plays a critical role in creating diverse antibody receptors and in increasing antibody affinity and specificity [15]. Each antibody (candidate solution) has an independent mutation rate proportional to its affinity with respect to the nonself antigen, namely that the hypermutation rate is inversely proportional to the cell affinity.
3.3. Application to Intelligent Motion Control
This subsection aims to employ the AIS computing method in Section 3.2 to design an intelligent motion controller for holonomic omnidirectional mobile robots. In the proposed AIS applied to solve optimal controller problems, the antigen is the problem to solve and the antibody is the generated solution. An antibody represents the control parameters kp1, kp2, kp3, ki1, ki2, ki3 in (12), namely, that an antibody is a parameter sequence kp1, kp2, kp3, ki1, ki2, ki3. This optimal feasible sequence will be evolved by the proposed AIS algorithm to achieve trajectory tracking and stabilization for holonomic four-wheeled omnidirectional mobile robots.
Affinity indicates the binding capability between an antibody and an antigen. It determines the quality of the antibody solutions according to the predefined AIS affinity function. Based on the affinity distances in (14) in this optimal control problem, the affinity function (performance index) used to evaluate the antibodies is the following integral square error (ISE) of the four-wheeled holonomic mobile robot given by

The AIS algorithm for optimal controller design of four-wheeled holonomic mobile robots is described by the following steps.
Step 1. Initialize the AIS algorithm and number of iterations.
Step 2. Randomly generate an antibody population of size (Ab1, …, Ab s ). Each antibody contains genes to represent the control parameters kp1, kp2, kp3, ki1, ki2, ki3.
Step 3. Calculate the affinity value for all the antibodies using the affinity function (15).
Step 4. Generate clone set for the best n antibodies. The number of copies is proportional to their affinities: the higher the affinity, the larger the clone size.
Step 5. Update antibodies.
Step 6. Perform hypermutation process to increase the diversity and generate the matured clone set.
Step 7. Check the stopping criterion. If the stop criterion is not matched, go to Step 3 and set t = t + 1; otherwise, output the optimal solution (best memory cell) and its corresponding control parameters and stop the algorithm.
Remark 1. This proposed AIS algorithm can be easily extended to not only design the optimal dynamic controllers with parameter variations and uncertainties [14] but also develop the intelligent polar-space motion controllers for holonomic robots [3, 4].
4. FPGA Implementation of the AIS Intelligent Motion Controller
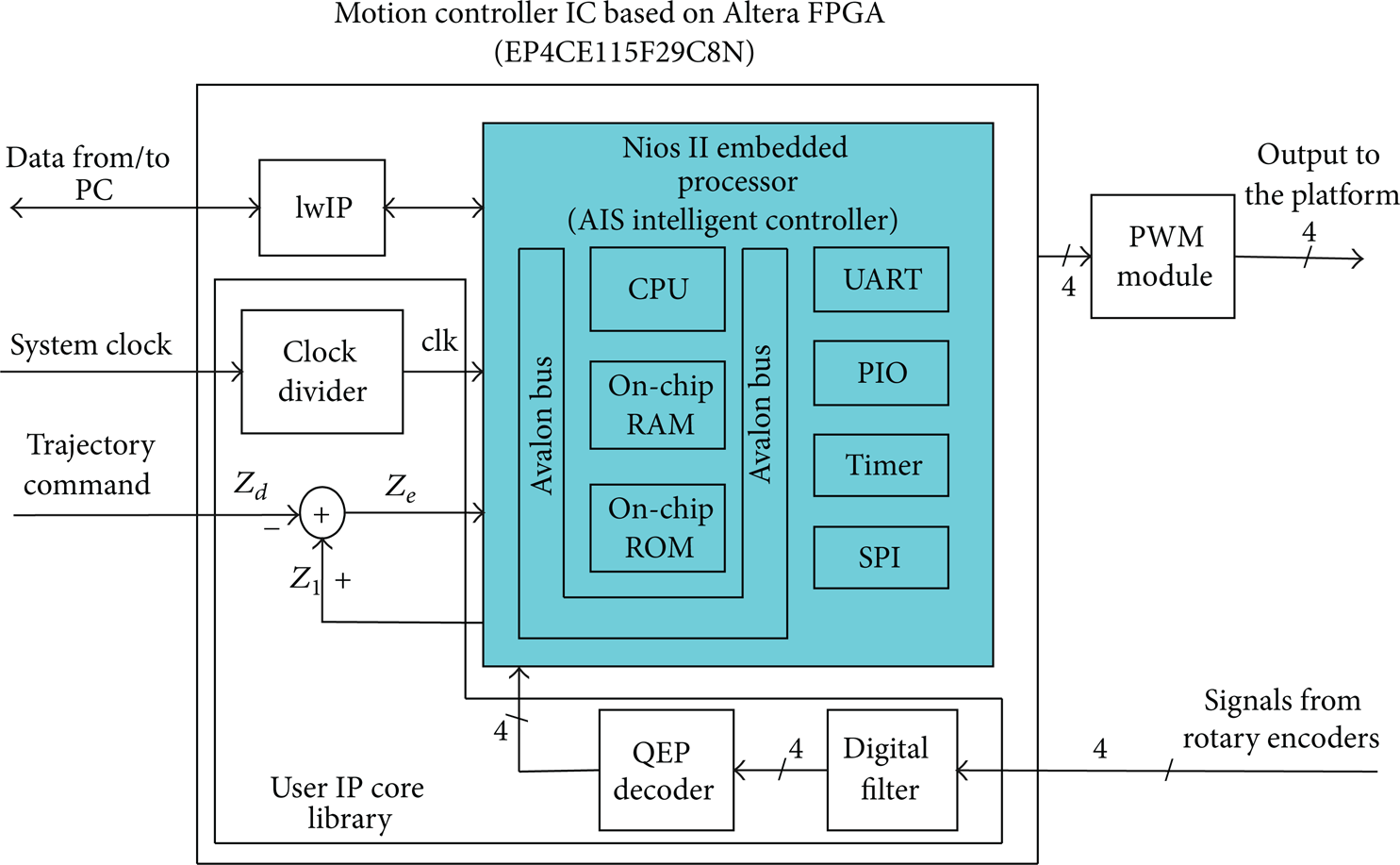
This subsection is devoted to designing a low-cost embedded AIS motion controller of the holonomic omnidirectional mobile robot in order to achieve the control law (12). Figure 4 depicts the architecture of the Altera FPGA implementation for the proposed AIS-based mobile robot motion controller using SoPC technology and hardware/software codesign approach. Both motion control law in (12) and AIS tuning algorithm have been implemented into the 32-bit Nios II processor whose numerical precision and computation speed are high enough to realize the control law and AIS algorithm. The hardware user IP cores (custom logic), including quadrature-encoder-pulse (QEP), pulse width modulation (PWM), and digital filter for this robotics application, have been developed by VHDL (VHSIC Hardware Description Language). The software AIS-based motion controller and hardware custom logic are connected to the system interconnect fabric via Avalon bus for developing the pragmatic AIS-based intelligent motion controller in one FPGA chip.
FPGA implementation of the proposed AIS intelligent motion controller.
With the obtained QEP signals from the encoders, the current position and orientation Z1(t) = [x(t) y(t) θ(t)] T of the holonomic mobile robot can be dead-reckoned by the embedded soft-core CPU Nios II. The optimized AIS controller's output ω = [ω1(t) ω2(t) ω3(t) ω4(t)] T is generated to the PWM module and then steers the four DC brushless motors mounted on the four omnidirectional wheels. Worthy of mention is that a real-time operating system (RTOS) MicroC/OS-II was ported into the same FPGA chip to construct the Ethernet network and handle the data communication with PC via TCP/IP protocol. Moreover, the embedded soft-core Nios II processor works with the lwIP (lightweight IP) for the Ethernet connectivity, thereby significantly reducing the FPGA resource usage. Compared with the PC-based AISs [15–20], the proposed FPGA-based AIS intelligent controller is more efficient and practical for robotics applications. The used FPGA chip is Altera Cyclone IV EP4CE115F29C8N with 114,480 LEs, 525 user I/O pins, 3,888 embedded memory (Kbits), 4 PLLs (Phase Lock Loop), and an embedded soft-core Nios II 32-bit RISC (Reduced Instruction Set Computer) processor.
4.1. FPGA Implementation of the AIS-Based Motion Controller
The embedded AIS-based controller of the holonomic mobile robot is presented in Figure 4, in which the embedded processor in FPGA is employed to perform the AIS tuning algorithm and motion control law. Figure 5 depicts the flowchart of the embedded AIS-based controller program, where the main program and the interrupt service routine (ISR) for the intelligent motion controller were coded in C/C++ language. In the main program, the AIS algorithm is executed by the processor to offline-tune the control parameters, kp1, kp2, kp3, ki1, ki2, ki3. This optimized parameter sequence will be employed in the ISR motion controller program to obtain optimal control performance. Compared with the nonoptimal controller [1–4], this autotuning approach takes the advantages of optimal performance and high efficiency.

Flow chart of the proposed AIS parameter tuner.
With the optimal control parameters obtained from the AIS tuner, the embedded processor calculates the current position and orientation of the holonomic mobile robot from the QEP circuit via dead-reckoning approach and then obtains the values of Z1 and Z e . Finally, the output of the intelligent AIS control law is sent out to the PWM module, thus steering the four holonomic omnidirectional wheels. Through the Altera Nios II integrated development environment (IDE), the AIS-based controller program is cross-compiled and downloaded into the SDRAM via JTAG interface.
4.2. FPGA Implementation of the AIS Parameter Tuner
As mentioned in Section 4.1, the AIS parameter autotuner plays a key role in the proposed optimal motion controller. This subsection presents the FPGA implementation of the AIS parameter tuner, aiming at providing the optimized control sequence kp1, kp2, kp3, ki1, ki2, ki3. The AIS auto-tuner is implemented in embedded processor to evolve the optimal control sequence via the clonal selection and hypermutation operations described in Section 3. This processor works with the hardware custom logic IPs in one FPGA chip to achieve the stabilization and trajectory tracking tasks by using hardware/software technique and SoPC technology. This efficient AIS tuner searches for the optimal solutions, resulting in an optimal sequence to the motion controller for the four-wheeled omnidirectional mobile robot. This FPGA approach is very useful to construct an experimental AIS-based holonomic mobile robot to realize the proposed methods.
Remark 2. This proposed FPGA-based AIS algorithm can be easily extended to design optimal motion controllers in N-wheeled omnidirectional mobile robots.
5. Experimental Results and Discussion
The aims of the experiments are to examine the effectiveness and performance of the proposed SoPC-based AIS intelligent motion control law (12) to the four-wheeled holonomic omnidirectional mobile robot. In order to illustrate the benefits of the proposed AIS-based optimal motion controller, these results are compared with the tracking performance in conventional non-optimal controllers [1–4], GA-based controllers [21–23], and PSO-based controllers [24–26]. The optimal sequence is obtained from the AIS intelligence computing with the following parameters: λ = 2, ρ = 10, n = 6.
5.1. System Architecture of the Experimental Holonomic Mobile Robot
The aim of the following experiments is to examine the effectiveness and performance of the proposed AIS-based embedded optimal controller by constructing an experimental holonomic mobile robot shown in Figure 6. The holonomic omnidirectional wheels are driven by four DC brushless servomotors with four mounted encoders of 300 pulses per revolution to provide QEP information. The proposed AIS tuning method and control law are realized using C/C++ code in the Altera Nios II embedded processor incorporating with the developed robotics custom logic IPs. The FPGA chip integrated the embedded soft-core processor, RTOS, lwIP, and VHDL-based IP circuits for performing the SoPC-based AIS control law of the holonomic mobile robot. All the experiments were conducted with the system parameters: L = 19.4 cm and r = 5.08 cm.
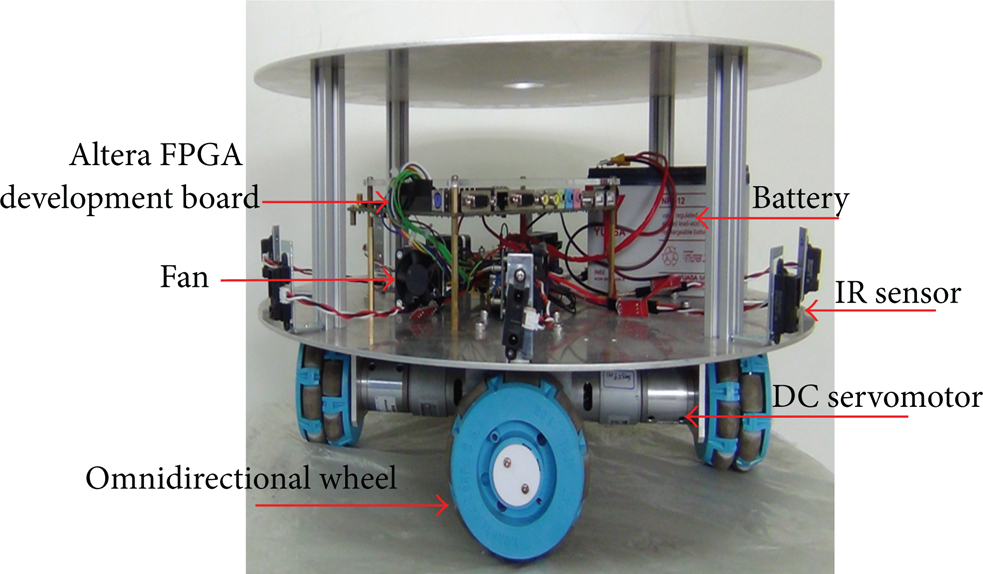
Picture of the experimental holonomic omnidirectional mobile robot.
5.2. Point Stabilization
The first experiment was conducted to investigate the regulation performance of the proposed AIS intelligent control law (12). The initial pose of the omnidirectional mobile robot was assumed at the origin; that is, [x0 y0 θ0] = [0 m 0 m 0 rad], and the desired final eight goal postures are located on the unit circle, given by [10 cos (nπ/4) m 10 sin (nπ/4) m (π/2) rad] T , n = 0,1, 2, …, 7.
Figure 7 depicts all the experimental trajectories of the omnidirectional mobile robot from the origin to the eight goal poses, and Figure 8 shows the heading behavior of the proposed stabilization law for the mobile robot moving towards the desired orientation π/2 in the case n = 0. Through experimental results, the holonomic mobile robot with the proposed AIS stabilization method has been shown capable of reaching the desired postures. Comparing this stabilization result with the one in non-optimal controllers [1–4], this AIS-tuning approach optimizes the controller's performance and ensures the stability without manually tuning the control parameters.

Experimental results of the proposed AIS-based motion controller for achieving stabilization.

Illustration of the orientation behavior moving towards the desired orientation of π/2 in the case n = 0.
In order to exhibit the merit of the proposed AIS tuning approach over conventional GA and PSO, Figure 9 presents the evolutions of performance index (fitness value) for the proposed SoPC-based AIS-tuning controller and the two conventional controllers to achieve point stabilization. As shown in Figure 9, the proposed FPGA-based AIS computational intelligence converges to the optimal solution with better performance index. Through these experimental results, the holonomic mobile robot with the FPGA-based AIS optimal controller is superior to the conventional controllers.
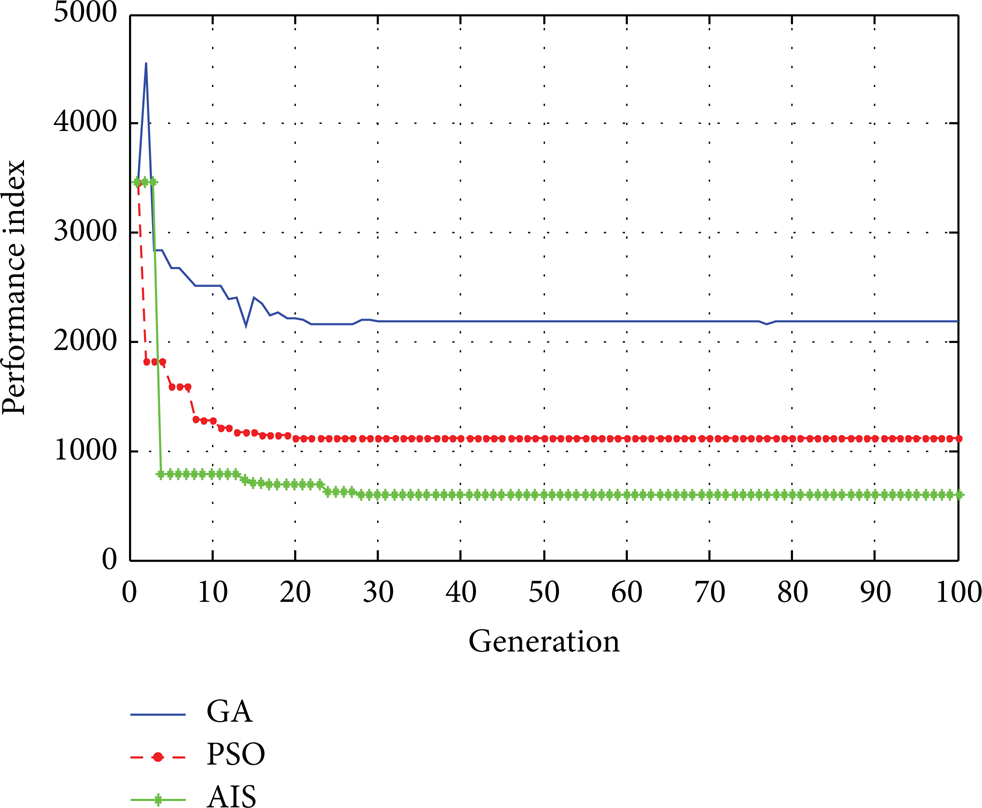
The evolutions of performance index in the proposed AIS, GA and PSO controllers to achieve point stabilization.
5.3. Elliptic Trajectory Tracking
The elliptic trajectory tracking experiment is aimed to explore how the proposed controller (12) steers the holonomic mobile robot to exactly track an elliptic trajectory described by
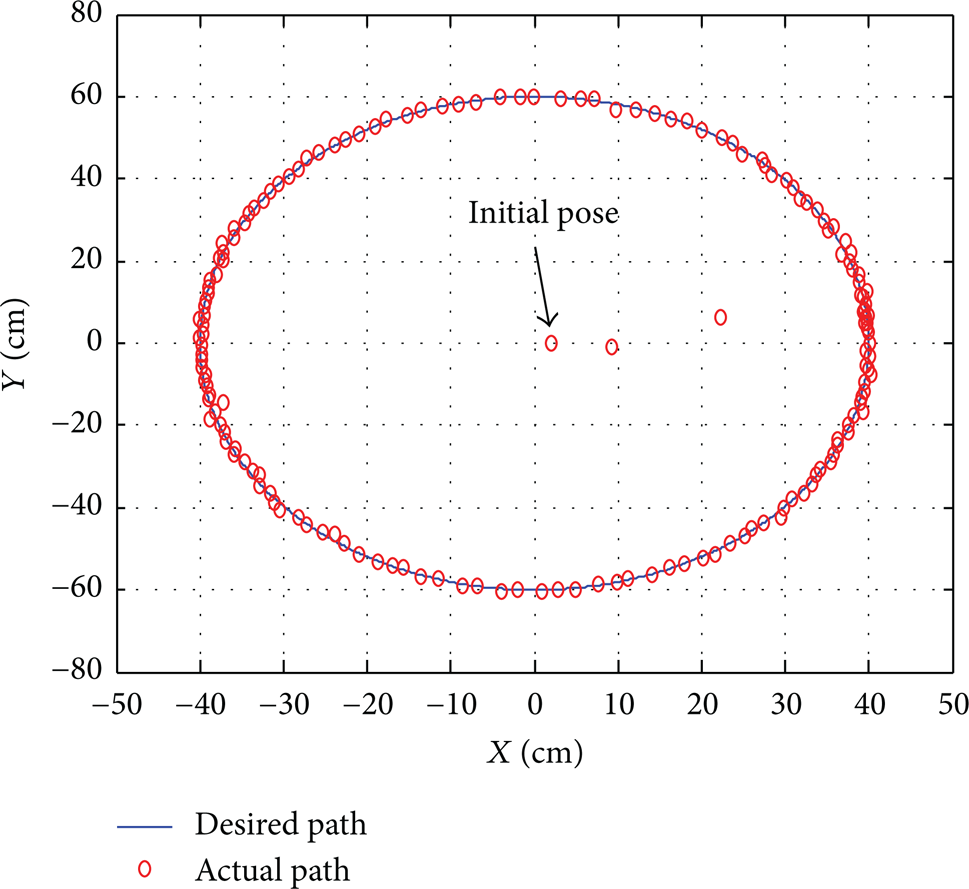
Experimental result of the elliptic trajectory tracking.

Tracking errors for the elliptic trajectory tracking.
Figure 12 presents the evolutions of performance index in the proposed AIS, GA, and PSO controllers to achieve trajectory tracking. These results indicate that the proposed FPGA-based AIS intelligent controller (12) is capable of successfully steering the holonomic omnidirectional mobile robot to track the elliptic trajectory. The proposed FPGA-based AIS computational intelligence outperforms the conventional GA and PSO approaches in designing optimal motion controller for the four-wheeled holonomic mobile robots.

The evolutions of performance index of the proposed AIS, GA, and PSO controllers to achieve elliptic trajectory tracking.
6. Conclusion
This paper has presented an intelligent motion controller using FPGA-based AIS computational intelligence to achieve trajectory tracking and stabilization of a holonomic omnidirectional mobile robot with four independent driving wheels equally spaced at 90 degrees from one another. Based on the kinematic model, an intelligent kinematic controller has been synthesized via AIS computing paradigm. Both AIS parameter tuner and kinematic motion controller are integrated in one FPGA chip to efficiently construct an experimental holonomic mobile robot. Through experimental results, the proposed AIS-based optimal motion controller has been shown to achieve stabilization and trajectory tracking successfully. These results indicate that the proposed FPGA-based intelligent AIS optimal controller outperforms the non-optimal controllers and the conventional optimal controllers.
Footnotes
Acknowledgment
The authors gratefully acknowledge financial support from the National Science Council, Taiwan, Taiwan, under grant under grant NSC 102-2221-E-197-023.