
Abstract
Real-time information about the state (location, speed, and direction) of other vehicles in the system is critical for both safety and navigation applications in future intelligent transportation systems. However, reliably obtaining this information over multiple hops in a capacity constrained, contention-prone wireless network poses a significant challenge. In this paper, we describe an algorithm VCAST that addresses this challenge by exploiting a notion of distance sensitivity in information propagation, in which information is forwarded at a rate that decreases linearly with distance from the source. By doing so, the required communication overhead per node can be significantly reduced, thereby reducing channel contention, allowing higher information supply rates, and scaling to larger network sizes. VCAST can be used to improve safety against collisions and to enable dynamic routing and navigation techniques by providing aggregate traffic information in an extended neighborhood. The performance of VCAST is validated using extensive ns-3 simulations under different network sizes and densities with an IEEE 802.11b transmission model and the advantages of VCAST in comparison to non-distance-sensitive approaches are highlighted.
1. Introduction
Infrastructureless, vehicle-to-vehicle (V2V) wireless communication is expected to be the basis for both safety and navigation applications in future intelligent transportation systems [1, 2]. Examples of safety applications in transportation scenarios include collision warnings, guidance on lane change and lane merge, and stopped vehicle alert. Examples of intelligent navigation applications include dynamic travel-time computations and rerouting based on real-time traffic information. A building block for all these applications is a real-time vehicular traffic mapping system on board every vehicle, which portrays information about current position of other vehicles in its vicinity and provides guidance about accidents, approaching emergency vehicles and traffic congestion over an extended neighborhood. In this paper, we design VCAST, a scalable, infrastructureless, peer-to-peer wireless network service for computing such a real-time traffic map over a given region surrounding each vehicle (This paper is a significant extension of a shorter version that appeared in IEEE VTC 2012 [3]. The specific additions are as follows. (1) Simulations are carried out in ns-3 using an IEEE 802.11 b transmission model to quantify the impact of network size, vehicular density, vehicular mobility, and time-varying intervehicular separations on the achievable staleness. (2) The average communication cost incurred by each vehicle is quantified. (3) The performance is compared analytically and using simulations with schemes that do not incorporate distance sensitivity, and the significant impact on scalability using VCAST is highlighted. (4) Complete proofs are included for all lemmas and theorems).
We assume that vehicles are equipped with a differential GPS that can estimate its location to an accuracy of about 1-2 m. As a result, by advertising this information, vehicles can learn about traffic within a one hop communication range. However, estimating traffic maps over a large area using multihop wireless communication is a much more challenging task. (1) Firstly, we note that forwarding each vehicle's information over multiple hops at a constant rate is unlikely to be scalable as it will cause the amount of communication required at each vehicle to grow with the number of vehicles in the region over which traffic information is required. As a result, both the allowable broadcast rate and the accuracy of the traffic map obtained at each vehicle will decrease as vehicular density and size of the region increase. Hence effective forwarding algorithms need to be designed to ensure that the system remains scalable with vehicular density, information supply rate, and region size. (2) Secondly, there exist tradeoffs in choosing the rate and communication range of each broadcast. While higher broadcast rates and range promise greater tracking accuracy, in reality wireless channel contention can cause an adverse effect in tracking accuracy as these levels exceed a certain limit. Existing broadcast techniques for vehicular safety systems have primarily focused on balancing transmission rate and communication range to maximize the reliability of single hop wireless communication. However, in such an approach information about other vehicles is available only when intervehicular distance is too small which may not be enough to avert a collision [4] or to provide a timely re-route in the presence of traffic congestion. On the other hand, increasing the single-hop communication range or moving to multihop forwarding techniques to learn about vehicles in a larger area quickly decreases the achievable information supply rate from each vehicle (even those at smaller distances). Hence, there remains a need for multihop broadcasting techniques that are able to supply timely information over large distances without compromising on data supply rates at smaller distances.
Contributions. To address the above challenges and to ensure scalability when providing traffic maps over large regions in real time, we exploit a notion of distance sensitivity in propagating individual vehicle information: information about each vehicle is propagated at a rate that decreases linearly with the distance from the vehicle [5, 6]. The rationale behind exploiting distance sensitivity is that the reaction time available to a vehicle for taking safety actions or for computing new routes towards the destination is lesser with respect to the state of nearby vehicles than that of farther vehicles. VCAST maps this distance-dependent reaction time into delivery of information with quality that progressively decays as a function of distance.
We use staleness in vehicular state information as a metric for information quality as it reflects how old the current information about a particular vehicle is and show that traffic information in VCAST can be obtained with a worst-case staleness that is bounded by
The performance of VCAST is validated using extensive simulations in ns-3, a discrete event simulator for wireless networks, under different network sizes, network densities, source broadcast rates, and communication ranges. The results of our evaluation show that, by using distance-sensitive forwarding, VCAST is able to scale to larger network sizes as well as support much higher broadcast rates compared to non-distance-sensitive techniques. The reason for scalability was shown to be the significantly lower message overhead which reduces the channel contention in the network. We have also characterized the performance of VCAST under severe random mobility and studied information staleness when aggregated data is transmitted as opposed to individual vehicle information.
Impact. By forwarding traffic information over multiple communication hops, we expect several advantages: (1) vehicle location over a vicinity will be available even if the communication range is extremely low because of high density, thus improving vehicular safety, (2) information about approaching emergency vehicles will be available, (3) information about lane changing and merging vehicles will be available even if they are outside a single communication range, and (4) information about road blocks, accidents, and impending congestion will be available from several miles ahead, thus permitting higher level applications that dynamically re-route based on this information. Some of these scenarios, from a vehicular safety perspective, are illustrated in Figure 1. To achieve scalability, VCAST provides traffic information with an accuracy that degrades with distance, but we expect this to be a reasonable condition that is still sufficient for both vehicular safety and intelligent navigation. Finally, we note that VCAST does not require any special hardware or modification to vehicular transmission standards; instead, it can simply piggyback on the proposed Here I am communication [1, 2] for vehicular networks.

Utilization of multihop vehicular information for safety applications. The arrows indicate multihop information flow towards car C. Knowledge of states of A and D will guarantee safe lane change to left and right, respectively. Knowledge of congestion will allow safe, timely reaction.
Outline of the Paper. In Section 2, we describe related work. In Section 3, we describe our system model, the VCAST algorithm, and provide an analysis for the expected accuracy and communication cost. In Section 4, we evaluate the performance of our system in simulations. In Section 5, we present conclusions and state future work.
2. Related Work
The design of routing protocols for vehicular ad hoc networks and more generally in mobile ad hoc networks is a well-researched topic and a good survey of these techniques can be found in [7–9]. Many of these protocols have focused on delivering aperiodic, low bandwidth data such as emergency vehicle information to either a single vehicle (unicast) or a group of vehicles in a geographic region (geocast) with low latency [10–17]. On the other hand, the focus in this paper is on broadcasting information from each vehicle at high rates to support the design of safety and navigation applications.
The design of wireless broadcast protocols has also received a lot of research attention lately [1, 18–22] in the context of vehicular safety applications. There have been several recent papers that have focused on the problem of balancing broadcast range and reliability so as to maximize the number of successful receptions in close proximity of the sender [18–21]. A common foundation in these papers to handle the tradeoff is to reduce the communication range in regions of high density so as to improve the reliability of reception. However, these papers mainly focus on reliable one-hop message reception and not on multihop propagation. As a result, the information about vehicles outside the communication range is not available even when the range has to be very low because of high density. The trade-off in single-hop broadcast schemes is that a higher communication range causes larger staleness even for nearby vehicles, while a lower communication range prevents information availability from beyond that range. On the other hand, the algorithm developed in this paper can be used to propagate both individual vehicle information and aggregate traffic information over several communication hops and yet retain high data supply rates at smaller distances.
We also note that rate and power control algorithms [1, 18–21] developed for a single hop vehicular broadcast are complementary and can be used in conjunction with the distance-sensitive multihop forwarding algorithm designed in this paper. Thus decisions on source broadcast rate and range can be made commensurate with traffic density using the techniques proposed in [1, 18–21], and VCAST can be used to aggregate and forward this information over multiple hops.
Multihop broadcast algorithms [23–29] for vehicular networks have mainly focused on the choice of optimal forwarding vehicles and on the reduction of redundant forwarding vehicles using one of several heuristics proposed in [30]. A good survey of multihop broadcast techniques in mobile ad hoc networks is presented in [31]. The idea of distance-sensitive broadcasting rates developed in this paper for ensuring scalable all-all information broadcast has thus far not been explored in the context of mobile ad-hoc and vehicular networks. The improvement in communication overhead gained by exploiting distance sensitivity is characterized in Section 3.3.
The concept of distance sensitivity has previously found applications in several other networking fields in different forms. For example, route aggregation in the Internet utilizes this concept for efficiently distributing routing information [32]. Fisheye routing [33] uses this idea to propagate routing tables in mobile ad hoc networks. Fractionally cascaded information [34] is a form of distance-sensitive key sharing that is widely used for speeding up traversal of data structures. Distance sensitivity has also been used in wireless sensor network based querying and tracking applications to model communication latency and information quality as functions of distance [35–38]. In the context of network-wide continuous broadcast of system states, an algorithm has been designed in [39] for supplying global state information to all nodes in a static sensor network with distance-sensitive latency and error. In this paper, we show that distance sensitivity is a valuable tool for efficient and scalable propagation of state information even for networks of mobile nodes (vehicles). Unlike the algorithm in [39], we design VCAST without assuming an underlying clustering or routing structure, thus avoiding the need for maintenance related communication.
3. System Description
In this section, we first state the system model and objective. We then describe VCAST and analytically characterize its accuracy and required communication rate.
3.1. System Model and Problem Statement
We model the vehicular network as a large geographic area with multiple traffic flows, each with potentially different traffic densities at different places. Let ρ denote the maximum density, that is, the maximum number of vehicles per unit area at any time in the whole region. Note that the geographic area will consist of regions with no traffic flows (i.e., no roads), as well as regions with high density traffic flows. When analyzing the impact of aggregation, we assume that the region is partitioned into geographic cells which allow representation of aggregated traffic information for that cell. The cells need not be of the same size, but for ease of explanation we assume that the area of each cell is constant and equal to
Let N denote the maximum number of vehicles within the tracking zone of each vehicle. Thus
Let p denote the frequency at which each vehicle broadcasts its own information. Let
3.2. Distance-Sensitive Broadcast Algorithm
A naive technique would be to require each vehicle to obtain information about all vehicles in its tracking zone at a constant interval of
To address these drawbacks, we propose to forward information about a vehicle at a rate that is proportional to the distance from that vehicle. Also, in VCAST, a vehicle suppresses forwarding of information about a vehicle in an interval, if some other vehicle has already forwarded information about the respective vehicle in that interval. By doing so, we show that the communication cost can be significantly reduced, leading to scalability. A more formal description of VCAST is presented below. A pseudocode in guarded command notation [40] is provided in Algorithm 1, which shows the program at each vehicle in the form of
Timer.start Add i to Send
In VCAST, each vehicle j maintains a list
For the case where aggregate traffic information is to be propagated, each vehicle computes summary information such as density and average speed for the cell in which it resides based on the information it possesses about vehicles within its communication range. This summary is then propagated in a distance-sensitive manner: information about a cell at distance
3.3. Analysis
Theorem 1.
The average amount of data communicated per unit time by each node in VCAST to obtain information about all vehicles within a distance of R from itself is bounded by
Proof.
Let B denote the average amount of data communicated per unit time, by each node in VCAST. We discretize distance in intervals of

Note that this result makes an assumption that information about nodes at a distance of k communication hops is broadcasted at most once every k intervals in each communication neighborhood. In the presence of channel contention and hidden terminals, the assumption may be violated causing duplicate transmissions of vehicular information within a communication neighborhood and an increase in the amount of communication per node. The results of our simulation will include the impact of channel contention and duplicate transmissions.
Under a uniform distribution of vehicles in a 2d region, it can be inferred from the results of the previous theorem that the communication cost per node only grows as
Comparison with Multihop Broadcast Protocols without Distance Sensitivity. In order to analytically compare the bound on communication cost with multihop broadcast algorithms that do not incorporate distance sensitivity in message forwarding, first consider an algorithm in which information is simply flooded without suppression of redundant messages. In this case, each node broadcasts information about all nodes in the region at a rate of p times every second yielding a communication cost per node that is bounded by
We now obtain a bound on how outdated the state information possessed by a vehicle is because of distance-sensitive forwarding. We refer to this as staleness in the information possessed by a vehicle.
Definition 2 (staleness (j,i)).
The staleness
Note that the staleness with respect to a vehicle is initially equal to the message latency from the source when information about the vehicle is received but continues to rise until the next update from the vehicle is received. The maximum staleness with respect to a vehicle thus occurs just before fresh information about the vehicle is received. Maximum staleness thus depends on the message latency as well as on the update interval. Staleness can further increase when messages containing information about a vehicle are lost. The effect of message losses will be quantified using simulations in Section 4.5.
Theorem 3.
The maximum staleness in the state of vehicle i at vehicle j in VCAST is bounded by
Proof.
Consider a vehicle j at a distance between
From Theorem 3, we note that the staleness at a distance d from a vehicle does not depend on the vehicular density or the region size, but only on the communication hop distance and the initial broadcast rate at the source. Hence, we expect that as the communication range increases the staleness should decrease. However, as the communication range increases, the interference within the vehicular transmission also increases and this can adversely affect the network reliability and system accuracy. In Section 4.5, we analyze the performance of our algorithm in large scale simulation and point out the impact of p and
We now state the average communication rate and staleness when aggregate cell information is propagated instead of actual vehicle location information.
Theorem 4.
The amount of data communicated by each node in VCAST per unit time, when aggregate cell information is propagated, to obtain information about each cell at distance up to R from itself is bounded by
Proof.
Let
In comparison with the result from Theorem 1, we note that the average communication rate reduces by a factor equal to the number of vehicles in each cell (
Theorem 5.
The staleness in the state of cell z at vehicle j in VCAST, when aggregate cell information is propagated, is bounded by
Proof.
Consider a vehicle j and cell z. The lowest broadcast rate about cell z that is available for vehicle j is
4. Performance
We evaluate the performance of VCAST using simulations in ns-3, a discrete event simulator for wireless, and mobile ad hoc networks.
Network Models. We use an IEEE 802.11 b physical layer communication model with a DSSS rate of
Measurement Strategy. Each vehicle's state information is assumed to be
4.1. Impact of Distance Sensitivity
The objective of this section is to quantify the performance gains achieved by using distance-sensitive forwarding as opposed to forwarding information about all vehicles at the same rate.
Scaling in Number of Nodes. In Figure 2(a), we show the maximum staleness as a function of intervehicular distance for
Impact of network size: VCAST versus non-distance-sensitive forwarding. (a) Maximum staleness versus pairwise vehicular distance:
Maximum staleness versus pairwise vehicular distance for VCAST:
Scaling in Source Broadcast Rate. In Figures 4(a) and 4(b), we fix the network size to

Impact of source broadcast rate: VCAST versus non-distance-sensitive forwarding. (a) Maximum staleness versus pairwise vehicular distance:
Message Complexity: The Reason Behind Successful Scaling in VCAST. In Figures 5(a) and 5(b), we show the number of vehicular records transmitted per second by every node for varying network sizes and varying source broadcast rates, respectively. These figures highlight the significantly lower message complexity in VCAST which reduces the contention even as network size and broadcast rates grow.

Comparison of message complexity: VCAST versus non-distance-sensitive forwarding. (a) Number of vehicular records transmitted per second per node at different network sizes for
4.2. Impact of Communication Range, Source Broadcast Rate, and Density
In this subsection, we evaluate the performance of VCAST under different communication ranges, source broadcast rate, and network densities. The aim is to highlight the scalability of VCAST and identify the tipping point in terms of each of these parameters for VCAST, that is, the point at which channel capacity is exceeded.
Communication Range. In Figure 6, we plot the maximum staleness in vehicle information against the intervehicular distance for a

Impact of communication range on VCAST: maximum staleness versus pairwise vehicular distance for VCAST:
Source Broadcast Rate. In Figure 7(a), we plot the maximum staleness in vehicle information against the intervehicular distance for a

Impact of source broadcast rate on VCAST: (a) maximum staleness versus pairwise vehicular distance with
Network Density. In Figure 8(a), we plot the maximum staleness in vehicle information against the intervehicular distance for a

Impact of network density on VCAST: (a) maximum staleness versus pairwise vehicular distance with
4.3. Impact of Time Varying Intervehicular Separations
The aim of this subsection is to characterize the performance of VCAST in the presence of time varying intervehicular separations caused by nonuniform mobility patterns. We note that there are potentially several traffic mobility patterns that can arise in a real vehicular network scenario. Our goal here is to analyze the scalability of VCAST and one of the important underlying factors that can impact performance in the context of these mobility patterns is the time varying density. There could be instants when a vehicle has a lot of neighbors within communication range and also instances when there are no neighbors. Therefore, in this simulation, we have chosen the random 2d walk mobility pattern with time varying speeds in the range of 20 m/s to 40 m/s, a potentially severe form of mobility that captures the essence of time varying separations and interference zone, caused in a traffic scenario.
In Figures 9(a) and 9(b), we compare the information staleness graphs for the random and uniform mobility patterns at
Impact of time varying random mobility pattern on VCAST: (a) maximum staleness versus pairwise vehicular distance for uniform and random mobility with
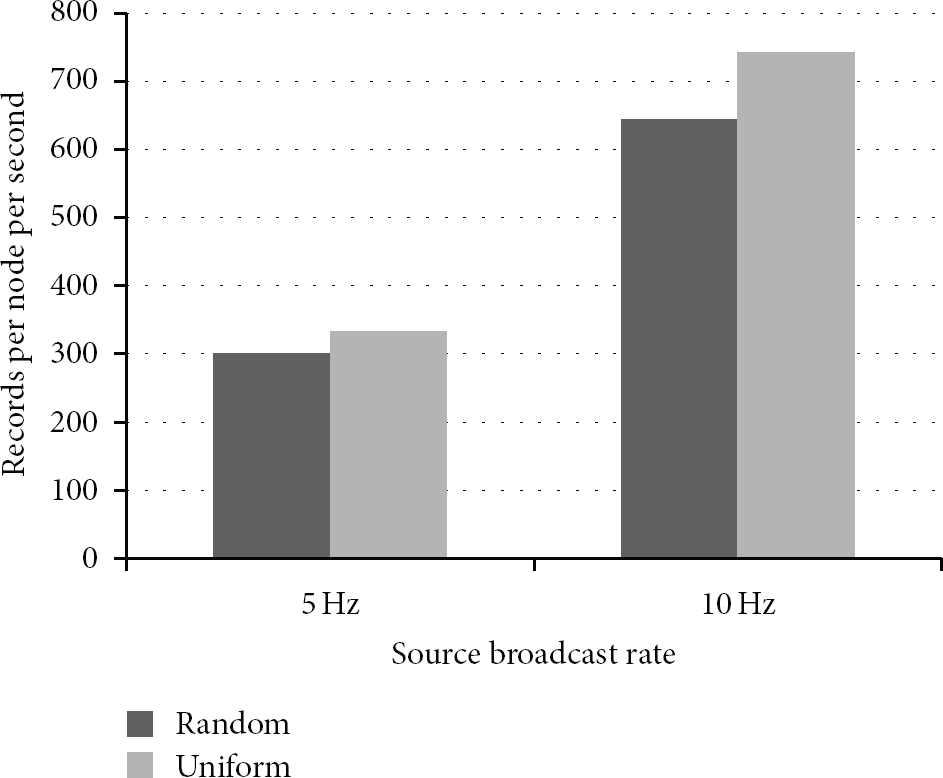
Impact of time varying random mobility pattern on VCAST (comparison of communication cost): number of vehicular records transmitted by each node per second at
4.4. Impact of Aggregation
In this section, we evaluate VCAST when aggregate information about a cell is transmitted over multiple hops as opposed to individual vehicle information. The region being simulated is divided into square cells of equal size. The width of each cell is assumed to be equal to the single hop communication range. In this evaluation, we have increased the network size to

Impact of aggregation on VCAST: maximum staleness versus vehicle-cell distance with
4.5. Summary of Results
Our experimental results show that by using distance-sensitive forwarding, VCAST is able to scale to larger network size as well as support much higher broadcast rates compared to non-distance-sensitive techniques. The reason for scalability is the significantly lower message overhead which reduces the channel contention in the network. We also characterized the performance of VCAST under severe mobility and studied information staleness when aggregated data is transmitted as opposed to individual vehicle information.
From all of the above experimental evaluations, we note that an ideal parameterization for VCAST is to set communication range to a small value and increase the source broadcast rate. By doing so, information at smaller distances can be obtained at high rates with low contention due to the small communication range. At the same time, information to larger distances can be transmitted with progressively increasing staleness. Moreover, by limiting the propagation of individual vehicular information up to distances of about 500–1000 m (for utilization by safety applications) and only propagating aggregate information beyond that, we observe that information from several miles ahead can be obtained within a few seconds without the need for any communication infrastructure.
5. Conclusions
We have presented an algorithm, VCAST, for obtaining individual vehicle location and aggregate traffic information over a multihop wireless vehicular network without the need for expensive roadside infrastructure, any special hardware, or modification to vehicular transmission standards. To ensure scalability in forwarding information over multiple hops, traffic information is propagated at a rate that decreases linearly with distance from the source. By doing so, the required communication rate per node can be reduced when compared with schemes that do not utilize distance sensitivity in information forwarding. This results in lower channel contention, thereby enabling higher source broadcast rates and better information quality at smaller distances while still being able to propagate information to large distances. Despite staggered forwarding, traffic information can be obtained with a staleness, which is a measure of error in the traffic information that is bounded by
The performance of VCAST was validated using extensive ns-3 simulation under different network sizes, network densities, source broadcast rates, and communication ranges. The results of our evaluation showed that by using distance-sensitive forwarding, VCAST is able to scale to larger network sizes as well as support much higher broadcast rates compared to non-distance-sensitive techniques. The reason for scalability was shown to be the significantly lower message overhead which reduces the channel contention in the network. We also characterized the performance of VCAST under severe mobility and studied information staleness when aggregated data is transmitted as opposed to individual vehicle information.
In future work, we would like to integrate VCAST with control algorithms for vehicular safety and navigation that utilize information with distance-sensitive quality. We would like to design optimal control laws for vehicular acceleration under models of distance-sensitive information availability that ensures the safety of the integrated control-communication system. We would also like to integrate our vehicular traffic mapping service with a navigation front end for dynamic computation of alternate routes and evaluate the impact of distance sensitivity on the quality of navigation performance.