
Abstract
Data aggregation scheduling in ubiquitous sensor networks is a major research interest for many researchers. Very little research is carried out to schedule the nodes in ubiquitous sensor networks for maximizing the throughput and utilize the hardware resources effectively. The traditional graph model does not model the interferences occurring from the concurrent transmissions in the Ubiquitous Sensor Networks. Hence in this paper we propose a new network model for the USN called a power control collision interference free model and a novel distributed data aggregation scheduling protocol which is adaptive to the rate and power. We tested the protocol in a USN consisting of 50, 100, 150, 200, and 250 number of nodes with different topologies and varying degree 2, 4, 6, 8, 10, 12, 14, 16, 18, 20, …, 40. We compared our results with the other protocols and proved that our proposed power control collision interference free model yields better results.
1. Introduction
RFID (radio frequency identification) is a technology which is used to acquire information anytime and anywhere through network access service [1]. Such ubiquitous network yields better results when integrated with wireless sensor networks (WSNs). This integrated network is called a ubiquitous sensor network (USN) [2]. Several servers participate in ubiquitous networks and the flow of data across the network is as follows
the sensors detect events, the RFID readers recognize tags, the information is forwarded to one or more servers, depending on the arrived event, the servers integrate data from RFID networks and WSNs fire the necessary procedures, each intermediate sensor implements method for data aggregation and filtering.
Generally the following are some of the limitations of RFID networks when integrated with WSN:
all the nodes share a single wireless channel for transmission and when multiple nodes transmit at the same time, their transmission may get collided, nodes cannot receive and send simultaneously since they are equipped with a single half-duplex radio transceiver [3], bandwidth and battery power are the two resource limitations for RFID active tags and sensors, retransmissions after collisions, overhearing and overemitting reduce the efficiency of USN.
Hence in order to overcome such limitations, an efficient schedule for data aggregation is needed. Each ubiquitous node in USN should forward data to the base station. Each node does not forward data to the base station directly. Instead it forwards data to a special node called head node. The head node in turn forwards data to the base station. Each node obtains a frequency for transmitting in one or more time slots.
The following are the two main objectives of our paper:
selection of the head node, finding a schedule which decides the following:
when head nodes should transmit, how the head nodes gather data from their neighbors.
Since the ubiquitous nodes change their state dynamically, finding a solution to the above mentioned tasks is very difficult.
An optimal schedule is a schedule with
minimum number of time slots (frame length), maximum number of concurrent transmissions per each time slot.
USNs are commonly modeled using
traditional graph model, physical interference model.
The traditional graph model does not model the interferences occurring from the concurrent transmissions.
In the physical interference model, the transmission becomes successful if and only if the signal-to-interference-noise-ratio (SINR) perceived at the receiver is above a certain threshold.
For example, if
That is,
α is the path loss ratio which has a typical value between 2 and 4, β is the threshold for a successful transmission.
Earlier several centralized and distributed scheduling algorithms are proposed for data aggregation in USN [4, 5]. In this paper, we presented a novel distributed data aggregation scheduling protocol using a power control collision-interference-free model. Our proposed protocol is adaptive to the rate and power control and also yields better results when compared with the other existing protocols.
2. The Proposed Power Control Collision Interference Free Ubiquitous Sensor Network Model
Consider a ubiquitous sensor network with n arbitrarily distributed ubiquitous nodes. Let a directed graph
Each node in the proposed power control collision interference free model is characterized by an 8-variable vector

The location denotes the global location of a ubiquitous node. Each node exists in two states called active and inactive states. The nodes that are willing to transmit are said to be in active state and are termed as active nodes, while the remaining nodes are said to be in inactive state and termed as inactive nodes. The state of a node changes frequently.
Now we model a ubiquitous sensor network as USN (V, crmax, ρ), where the following hold.
V is the set of n ubiquitous nodes each characterized with the 8-variable vector. crmax is the maximum communication range. Each node can send and receive data in the maximum range crmax. The transmission power of a node is always ≤ crmax. Let Every node has the flexibility to tune itself to an optimal power.

The spatial reuse and data rates are the two important factors to be considered to improve the efficiency of the USN. As the signal strength decreases with the square of the distance according to the free space path loss model, the interference range is assumed to be two times the required distance between the nodes in order to avoid interferences. Generally larger transmission powers result in high data rates but allow a few concurrent transmitters. Similarly smaller transmission powers result in low data rates but allow more concurrent transmitters. Hence an optimal transmission powers are chosen to improve the overall network capacity.
3. Distributed Algorithm
The models for representing Networks are divided into three categories [6]:
tree based, cluster based, hybrid topology.
In tree based structure, the root of tree is called sink node. Data flows from leaf nodes to sink nodes through one or more intermediate nodes [6, 7]. These intermediate nodes are called aggregator nodes. Aggregator nodes in turn add their own monitored data and send the aggregated data to its parent node [6].
In clustered approach, every cluster has a cluster head and the entire node in this cluster transmit data to the cluster head (CH). This CH either transmits data to sink node or to the CH of another cluster which is nearest to sink node [6].
In [8] a new adaptive distributed broadcast scheduling method for mobile ad hoc networks is proposed. In [9, 10] a method for maximizing the channel throughput in mobile ad hoc networks using mIDS is proposed. In [11] an ACSP interceptor for improving network capacity in mobile ad hoc networks is proposed.
In this paper we proposed a novel solution for improving the performance of USN. It consists of the following three steps:
identification of ConcHead Nodes, constructing a schedule with a list of neighbors of ConcHeads, finding an optimal schedule.
The protocol Optimal_SHDL will
identify the ConCHead nodes, construct a set of schedules from which an optimal schedule is also founded.
Generally time is slotted to intervals where L denotes the length of the interval.
A schedule is a sequence of time slots. All noninterfereing nodes 
Generally if each node knows when to transmit, ideal listening can be avoided. Every node after receiving or transmitting data goes to sleep mode or for processing the data until its next time slot, and this technique saves battery power [6].
Our distributed algorithm is an iterative process and ends when the complexity of the ConCHeadTree cannot be further decreased. The algorithm is as follows.
Algorithm 1.0 PCCIF (UV, N)
UV represents the set of of Ubiquitous nodes
N represents the total number of nodes
Step 1. Construct a PCCIF_Network from the set of nodes UV
Step 2. ConCHeadTree = Tree_traversal (PCCIF_Network, UV, N)
//Construct ConCHead Tree from the PCCIF_Network
Step 3. ConCHeadList = Optimal_SHDL (ConCHeadTree)
//Construction of Optimal Schedule contains three phases where we identify a list of ConCHeadnode, their neighbors, the schedule for transmission and an optimal schedule
Step 4. Empty List UV
Step 5. Set UV = ConCHeadList
//We rebuild a USN with the ConCHeadnode identified and in the new USN, the ConCHeadnode are the normal nodes
Step 6. Find complexity of the new USN
Step 7. If complexity level is above a threshold then
Forward_to_Base(ConcHeadList)
Goto Step 8
Else
Goto Step 1
Step 8. End.
An optimal schedule is constructed with edges from E. The total transmission time T consists of slots
The optimal schedule satisfies the following conditions:
each active node may be scheduled more than once but must be scheduled at least once, a node cannot act as a transmitter and a receiver in the same time slot, in order to avoid the primary interference [12], a head node vi transmits to the base station only after all its neighbors have been scheduled [13], we use the path loss radio propagation model [14] to characterize path loss:
where 
The construction of an optimal schedule from the proposed power control collision interference free model is as follows.
Given a USN tree, then the procedure Optimal_SHDL (ConCHeadTree) consists of the following phases.
( 1) Head Selection Phase. Construct one or more ConCHeadTrees and from each ConCHeadTree identify one or more ConCHeads.
(
2) Aggregation Scheduling Phase. Construct a schedule with the list of active nodes for each ConCHeadnode. All the neighbors of each ConCHeadnode are assigned different frequencies from the Frequencyset
Let
The above two steps are iterative and end when all the nodes are termed as either ConCHeadnodes or a neighbor to the ConCHeadnodes. There exists one or more ConCHeadnodes to forward the aggregated data to the base station and each ConCHeadnode has zero, one or more neighbors from where it gathers the data. Generally a ConCHeadnode is selected based on a criterion that improves the utilization of the hardware resources and maximizes the network throughput. The schedule consists of one or more slots. And at the end of the two phases a set of schedules are identified.
( 3) Optimal Scheduling Phase. The optimal schedule is constructed from the schedules constructed in the previous phases. An optimal schedule always improves the network capacity and also best utilizes the hardware resources at each ubiquitous node.
Algorithm 2.0 Optimal_SHDL
Step 1. Let N denote the number of nodes in USN and UV denote the set of all N nodes in USN
Step 2. for
Step 3. NodeSet = UV,
Step 4. Increment s by 1
Step 5. Repeat until NodeSet = NULL or no new traversal on USN
(5.1) Increment k by 1
(5.2) Empty ConCHeadList
(5.3)
Tree_Traversals(
(5.4) Construct Schedule [s, Slot[k], ConCHeadList [
(5.5) For each node X in ConCHeadList do
NodeSet = NodeSet − Activeneighbor[X]
(5.6) NodeSet = NodeSet – ConCHeadList
(5.7) Increment j by 1
End
Step 6. If NodeSet ! = NULL then
For Each node X in NodeSet do
Construct Schedule [s, Slot[k], X, 1]
Increment k by 1
End For
Step 7. Call Optimal_traversal (Schedule, s)
Step 8. End.
Algortihm 3.0. Tree-Traversals (A, i, j, NodeSet)
//neighbors A contains 1-hop neighbors list of a node
//non_conflict_set [A] contains the list of nodes that donot produce Type 1 or Type 2 interfernces with A
//Possible_frequency_set.—Contains the frequency with which the node A's neighbors can transmit
//ActiveNeighbor [X] contains list of neighbors who are transmitting alogn with X
(1.0) neighbors
Neighbors list of A
(2.0) non_conflict_set [A] ← Find from neighbors
(3.0) for each node X in non_conflict_set [A] repeat thru steps 4.0 to 8.0.
(4.0) ActiveNeighbor [X] = neighbors [X]
(5.0) Let Possible_ Frequency_set [X] ←
Assign (ActiveNeighbors [X], Frequencyset
(6.0) if ActiveNeighbor [X] is having Type 1 or Type 2 interferences with any 1-hop neighbors of each node in non_conflict-set [A] then
AcitveNeighbor [X] = Poweradaption (ActiveNeighbor, X, non_conflict_set, A)
(7.0) Totalnodes [
(8.0) End For
(9.0) Return non_conflict_set [A], Totalnodes [
(10.0) End.
Algorithm 4.0
PowerAdaption (ActiveNeighbor, X, non_conflict_set, A)
//
Step 1. For each u in ActiveNeighbor [X] do steps 2 thru steps 4
Step 2. AssignLevel = false, conc =
Step 3. For each
If
Assign Power
Assign Level = true
Break
Step 4. If AssignLevel = false then
ActiveNeighbor [X] = ActiveNeighbor [X] − u
Step 5. Return (ActiveNeighbor)
Step 6. End.
Algorithm 5.0 Optimal_traversal (Schedule, s)
Step 1. For I in s repeat steps 2 thru
Step 2. //To Maximize total number of concurrent transmissions
Construct NewSchedule I after Arranging slots in Schedule I in descending order of the totalnumberofnodes for each slot.
Step 3. //To Minimize frame length
Remove a slot consisting of minimum number of nodes from NewSchedule I if all its nodes appear in other remaining slots in NewSchedule I
Step 4. End For
Step 5. DescSort (NewSchedule, s)
Step 6. OptimalSchedule = NewSchedule [1]
Step 7. End.
4. Results
In [11] the authors assumed a
In this paper we assumed the same simulating parameters and we obtained the number of time slots from the PCCFI as 4, 8, 10, 12, 15, 17, and 18 when N = 10, 15, 20, 25, 30, 35, and 40, respectively. These results are shown in Figure 1. From [11] we observed that the numbers of time slots of the Greedy, RTS/CTS, and Ranked Schedule methods are far less than 4, 8, 10, 12, 15, 17, and 18 when N = 10, 15, 20, 25, 30, 35, and 40, respectively. Hence these results convey that the PCCFI method outperforms nearly 30–50% of the existing Greedy, Ranked Schedule, and RTS/CTS methods.
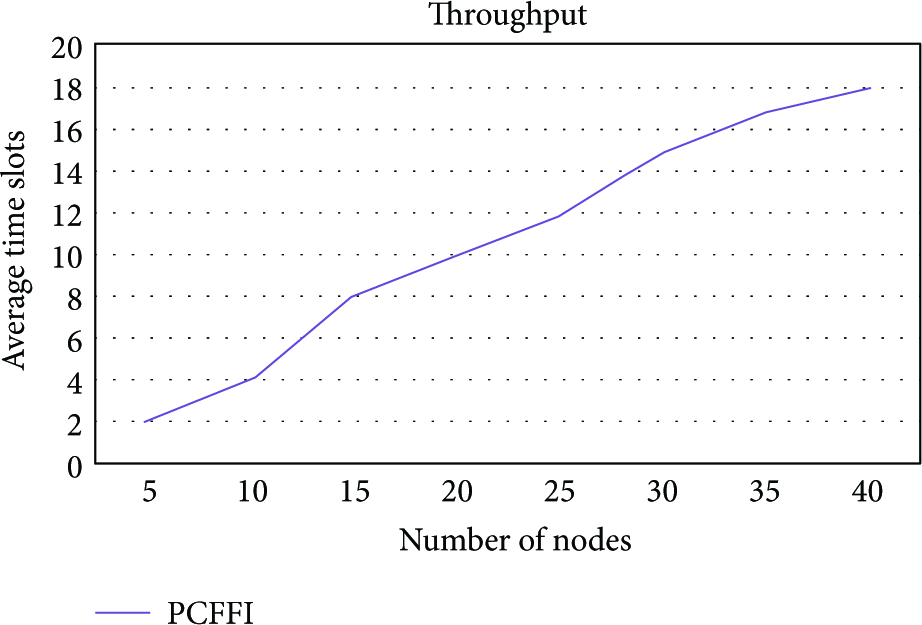
Throughput from PCCFI Simulating area
In [15] the authors assumed a 200-square area, with 25 m of transmission range. The SDA [16], PAS [17], DAS [18], SAS [19] and First-Fit [20] algorithms are executed with different densities and the results for an average of 10 runs are reported. They compared these algorithms performance with WIRES-BSPT [15]. Since First-Fit algorithm does not produce a conflict free schedule, it is omitted from the evaluations. They concluded that WIRESBSPT [15] outperforms all other solutions by 10% to 30%.
In this paper we assumed the same simulating parameters and with different datasets. The results are shown in Figure 2. These results show that the maximum time slots required by the proposed method are 10, 18, 28, 45, and 65 when N = 20, 40, 60, 80, and 100, respectively.

Throughput from PCCFI Simulating area 200 square area, where
The maximum time slots required by SDA [16], PAS [17], DAS [18], SAS [19], WIRES-BSPT [15], and First-Fit [20] are less than 10, 18, 28, 45, and 65 when N = 20, 40, 60, 80, and 100, respectively. Hence our proposed PCCFI method outperforms the SDA [16], PAS [17], DAS [18], SAS [19], WIRES-BSPT [15], and First Fit methods by 30–50%.
Hence our proposed algorithm outperforms the results obtained from Greedy, RTS/CTS, Ranked Schedule, SDA, PAS, DAS, SAS, WIRES-BSPT, and First Fit by 30–50%.
5. Conclusion
In this paper we proposed a new network model for the USN called power control collision interference free model. We also presented a distributed data aggregation scheduling protocol using the proposed model which is adaptive to the rate and power for USN.
Generally there is a high correlation between the transmission power of a node, number of concurrent transmitters and their spatial distances. Larger transmission powers results high data rates but allow a few concurrent transmitters. Similarly smaller transmission powers results low data rates but allow more concurrent transmitters. Therefore, the transmission powers are adjusted according to the number of concurrent transmitters and their distances to yield a maximum network capacity.