
Abstract
Combining individual sensor decisions can be an effective way for the enhancement of the final decision on sensor fields for intruder detection. This paper proposes a novel methodology to unify the decisions from individual sensors on a sensor field through the (hidden Markov model) HMM and rules. The HMM especially provides a stochastic decision out of the individual sensor decisions on the sensor field; then it is filtered through rule inferences reflecting the knowledge of movement patterns on the level of the sensor field, such as spatial-temporal information and factual information on the movement of objects. This use of contextual knowledge remarkably improves the final decision for the detection. Also, this paper proposes the discretization method to express the state space of sensor field, and the performance evaluation is given by simulations.
1. Introduction
Good quality intruder detection is a critical issue in many applications such as surveillance in military zones and security and protection of mission-critical facilities. The human surveillance has many limitations in the quality of detection because of physical limitations of human beings such as the hardness of a consistent concentration on surveillance and the lack of reliability due to the capriciousness in human emotion. To overcome such limitations, the automated surveillance using sensors can be introduced because sensors do not get exhausted and keep alarmed stably without interruptions by changes like those in human emotion. A weakness in using sensors, however, is the lack of intelligence in detection which drops the detection quality. This implies that how intelligence equips sensor networks is critical for the automated surveillance and detection. On the other hand, the sensitivity of individual sensors of different types is varied depending on their deployed environment, and their detection performances are wide in their values—especially in case of outdoor sensor networks [1, 2]. This makes it a challenge in practice how to deploy sensors in a sensor network so that it may fully reflect their environment states in spite of their variegated changes. For instance, the true and false alarm rates in an intruder detection sensor network change over time according to the states of the given environment, that is, sunny, snowing, raining, and so forth. This fact commands the robustness of outdoor sensor networks from the changeable environment [3].
The unification of individual sensor decisions on a sensor field, a deployed sensor network, could be a viable option to construct a robust sensor network under the uncertain environment. The decision-making step after collecting the knowledge of detections out of individual sensors may provide a chance to determine the extent of utilization of these individual decisions towards the final decision in the sensor network. This unification of small individual decisions has several advantages. First, the final decision in the sensor network mediates the individual sensor decisions, rather than leaving them isolated, that it could provide one conclusive decision. This decision synthesizing out of individual sensor decisions may definitely help to avoid misjudgments or confusions caused by those individual sensor decisions solely, though this mediation is varied and not easy in complexity [4]. Second, during the process of unifying individual sensor decisions, it is possible to combine and exploit knowledge beyond those of the individual sensors in order to enhance the final decision.
This addition of knowledge should undoubtedly heighten the intelligence of the detection system, because it considers extensive knowledge systematically towards the final decision. In usual practical sensor networks, however, since decisions are made mainly based on the information collected from individual sensors that is mostly scalar sensing data [5, 6], most of holistic knowledge sensor networks can use tends to be ignored in general; this may lead to misunderstandings in their decision makings. For example, usual sensor networks care about signal data, such as frequency, amplitude, and intensity, rather than the whole contextual knowledge on sensor fields: the spatial information (e.g., the relative location with respect to the whole network where a sensor reacts), the temporal information (e.g., the sensing pattern over time), and the factual information (e.g., the sensor type that makes a sensor node alarmed). These kinds of information are indeed precious in that they could contribute to the final decision for intruder detection. Hence, this paper purports to propose a methodology of decision making using the contextual knowledge by unifying individual sensor decisions on a sensor field. Although the proposed methodology in this paper is designed for intruder detection on sensor fields, it could be extended to other purposes on sensor networks.
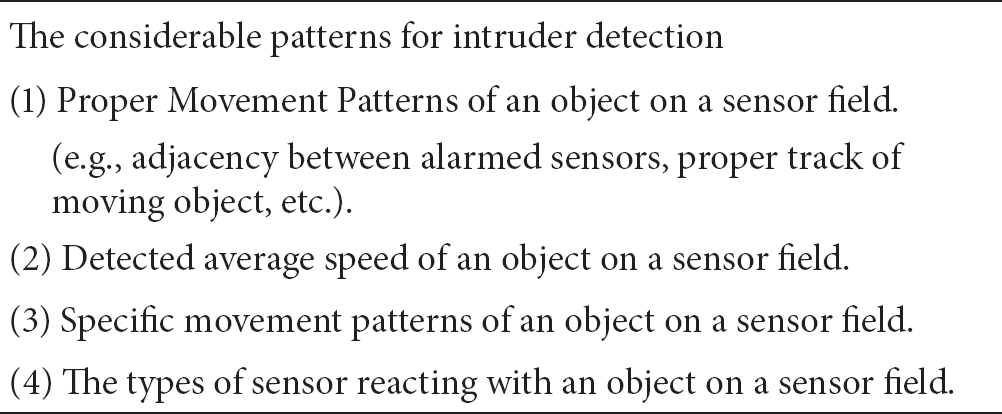
This study focuses on knowledge obtained from the three kinds of information mentioned above, called patterns on a sensor field. Table 1 shows the considerable patterns needed in the decision making of intruder detection.
The considerable patterns for intruder detection.
Proper movement patterns of an object on a sensor field could be investigated by the HMM with the Viterbi algorithm as shown in Figure 1. In a given observation, an explicit tracking of an object is available under the consideration of a stochastic movement pattern. The movement pattern retrieved by the HMM could be used for the intruder detection on the sensor field. For example, when the expected type of the target object is “Person,” the contiguity of the locations of the chased movement becomes a measurement to decide whether the moving object is “Person” or not; that is, when the retrieved trace of the moving object is improper, it could be filtered out by the consideration of the proper trace of the expected type of the target object. This is very helpful for the identification of the intruder. The trace of the detected object is also used for estimating its average speed so that the comparison of the estimated speed with the reported standard average speed of the expected type of the object can give useful information for the intruder identification. Furthermore, the movement pattern of the object can be restricted by the state and shape of the sensor field in many ways. If the corresponding movement patterns are explicitly definable by reflecting the restrictions, that knowledge could be useful for the intruder detection. For example, if the sensor field contains mine fields or cliff edges in a military zone, the movement of the target type “Person” can be hindered by the obstacles, and hence the movement of the intruder is predictable. The estimation of the trace of the moving object thus could be beneficial from such a state of the sensor field to increase the performance of the detection and the identification of the intruder.

Proper movement patterns retrieved by HMM with Viterbi algorithm.
The knowledge about the types of sensors that respond to the types of the moving object is very useful for the intruder detection. Figure 2 shows the responding sensor types for the type of each object. According to the figure, it is recognized that the moving object cannot be an animal if a magnetic sensor reports detection because magnetic sensors do not react to animals. These pieces of knowledge are contained in inference rules, by which any detection in a sensor can be inferred to a conclusion about the type of an object.

The corresponding sensors for objects.
Different from sensor network systems in signal processing, the main purpose of this paper is to construct an enhanced intruder detection model as a decision model unifying individual sensor decisions in a sensor network by using the HMM and inference rules. This paper also proposes a dynamic discretization method to express the state space for a sensor field. The remainder of the paper is organized as follows. In the next section, this paper continues with the description of the state space representation for the sensor field to which the HMM is applied. The structure of the HMM for intruder detection comes next and suggests the unifying decision-making approach that this paper uses. This part mainly consists of two subparts with an example, the stochastic decision, and the rule based decision. The conclusion follows lastly.
2. The State Space Representation of a Sensor Field for HMM
In order to deal with extended observation space 
2.1. State Formulation on HMM for a Sensor Field
Consider the following state space in discrete form:


All the possible states on a sensor field.
Then, (2) is rewritten as follows:

Assumption 1.
Let this paper make assumption for a sensor field as follows:
the sensor field consist of sensor nodes, a sensor nodes is the set of sensors; there is no duplicated detection area of sensor node but a sensor does; the sensors on sensor node are aligned to the same direction; there is at least one omnisensor having maximum detection distance among sensors in a sensor node.
Based on the above assumption, this paper suggests discretization method for the state space of dynamic sensor field; obviously, the sensor field of MSN (mobile sensor network) cannot but be dynamic [10, 11]. Through Figure 3, with Assumption 1, we notice that the range of sensor detection is the criteria for the distinction of

The discretization process for a dynamic sensor field.
Based on Figures 3 and 4, this paper points out R as follows:

where
As for the areas of delaunayTriangulation: convexSet
boundaryPoint
boundarySegment circumscribedQuadrilateral:

Note that the state space representation ensures that it presents all the possible state space. For the
2.1.1. An Example for State Formulation
Let this paper explain our discretization method in the previous section with an example.
As seen in Figure 5, there are two types of sensor node. The first one consists of pressure, acoustic, and magnetic sensor, and the other consists of pressure, PIR, and UWB sensor. Consider 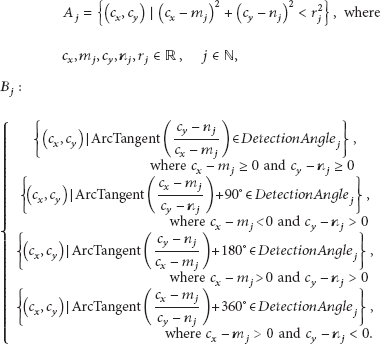



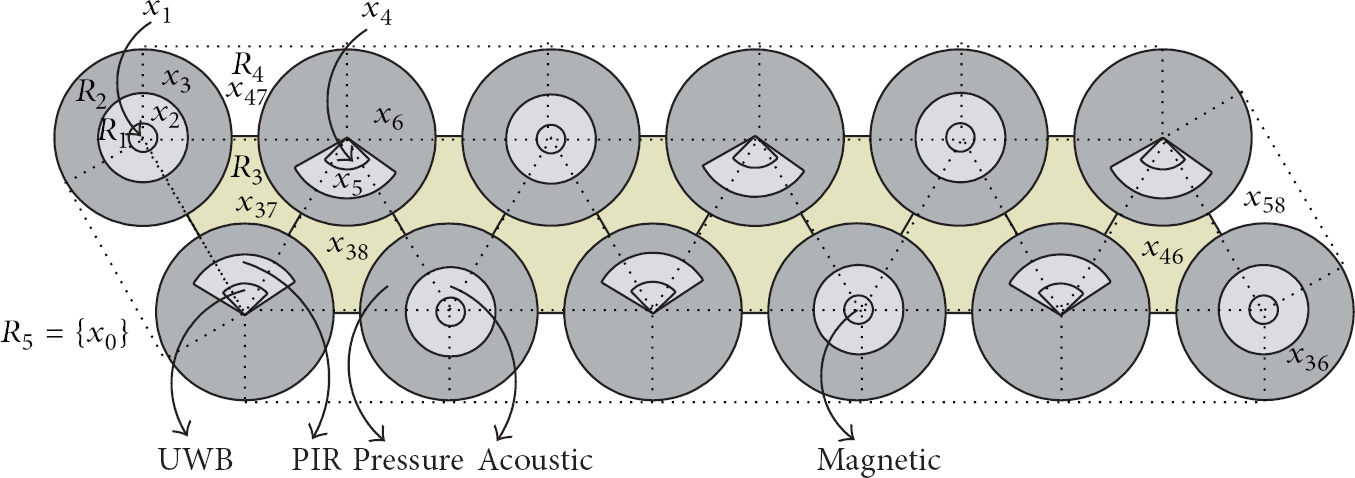
State space representation—an example a sensor field.
Denote the detection radius of a sensor and a sensor node by
As mentioned in Section 2.1, on account of the flexibility of undetectable area in a sensor field, this paper describes that area as triangles and circumscribed quadrilateral to ensure that our approach represents all the possible state space on a sensor field in any shape. The way to achieve the goal is fairly simple in principle. From the Delaunay triangulation, we obtain guaranteed convex set for the internal space of undetectable area on a sensor field; after that as using line segments of triangles for circumscribed quadrilateral, facilely we generate optimal state space, and the meaning of optimal state space here is that all the area is evenly separated as possible as a given parameter. The acquisition of the internal space of undetectable area is achieved by





Edge flip condition in Delaunay triangulation.
For the border of a sensor field, consider the following equation:



2.1.2. The Representation of Observations of the Example
According to the sensing factors, different types of sensors determine its decision through signals that react with thresholds [13]. In this point, the decisions from these sensors are regarded as the decisions reflecting the features of each type of sensors. In our point of view, this is meaningful in terms of sensor network. Hence, this paper exploits the decisions of each sensor in a sensor field as the observation of HMM.
The observation in HMM can either be discrete or continuous [14, 15]. This paper applies discrete observation which represents “Detect” (Active) and “No respond.” The possible discrete observation space in our case is
Figure 7 depicts an example of the representation of states and observations for Figure 5. There are 36 sensors on a sensor field. The whole possible numbers of observations are
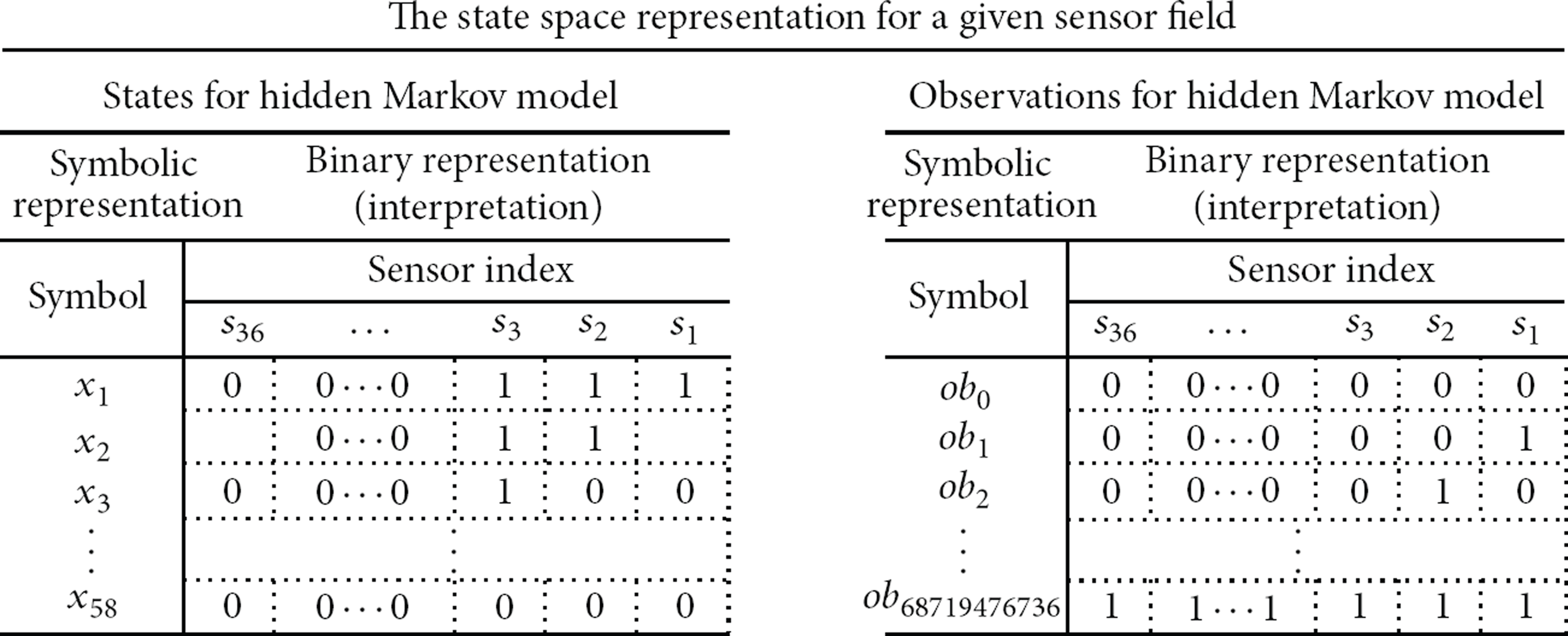
The state space representation—an example.
3. The Structure of HMM for Intruder Detection
The structure of HMM could be represented by
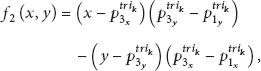
The equation for speed and direction calculation

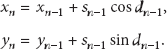
Denote the speed and direction at time n by
The movement model of “Person,” “Animal (Deer),” and “Tracked Vehicle” has been approximated with given parameters as follows: Person: (4.32,0.3888,10.0,0.75) for

Initial and transition probability generation.
Inital probability:
Transition probability:

Basically, the model λ requires transition matrix, initial probability, and emission matrix. The way of obtaining those factors of HMM is that for the case of transition matrix, random sampling is used as we mentioned above. Secondly, initial probability is obtained by the state change from

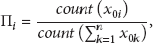
An example of calculation of emission probability on a sensor field.
4. Decision-Making Methodology Using HMM with Rules
As a first phase of our methodology for combining decisions, this paper provides the decision-making methodology based on stochastic model by adopting the suggested discretization method to HMM. The motivation of our methodology is quite naïve. Simply, there are distinct advantages between stochastic and cause-and-effect deterministic model. With an assumption of which all the events have probabilities to be happened, stochastic model is more explainable than cause-and-effect model for a given phenomenon. However, at some points, the cause-and-effect model could complement stochastic model for the enhanced decision. For example, the knowledge which has a difficulty in the representation of stochastic model can be easily extended to the rules for better decisions (experienced knowledge, statistical values, common sense, and others). Figure 10 indicates the architecture for our approach to combine stochastic (HMM) and rule-based decision within complexity of

The architecture to combine of stochastic (HMM) and rule-based decision.
As an approach for unifying decisions of sensors on a sensor field, this paper adopts HMM and rules. The first part of synthesizing decisions is achieved by HMM and then as a second part, this paper adopts rule-based decision. As shown in Figure 10, sensors in the sensor field have made sensor decisions by the input signals such as frequencies, amplitudes, decibels, and others. Then the decisions 
4.1. Stochastic Decision-Making Model with HMM on a Sensor Field
The procedure of stochastic decision is depicted by Figure 11. The procedure of stochastic decision making starts with calculating likelihood probability for the sequences of observations and obtaining maximum likelihood probability for the estimated movement patterns by Viterbi algorithm. Likelihood probability δ indicates how given observations are explainable by the established model (HMM), while

The procedure of stochastic decision using HMM.
The δ in Figure 11 is calculated by the observations in time 
This paper applies Viterbi algorithm [16] to find the most likely underlying explanation of the sequence of observation 
Note that 
Basically, stochastic decision is established with

To ensure that

The measurements of filtering required.
We define 

Note that
4.2. Rule-Based Filtering to Enhance the Stochastic Decision
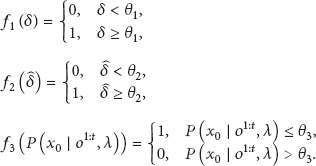
The simplest idea of rule-based filtering is that a tactic and implicit knowledge could be conducted as hypothesizes for the decision making. For example, the knowledge such as “the average speed of a moving object,” “stop pattern (specific pattern of an object),” and “corresponding types of sensors to an object” could be utilized as hypothesizes for intruder detection. This paper intends to represent those hypothesizes as rules for filtering HMM decision to enhance intruder detection. Hence, as shown in Figure 13, the final decision of our approach is defined as
Final Decision

Decision-making using HMM with rules.
The rule for final decision
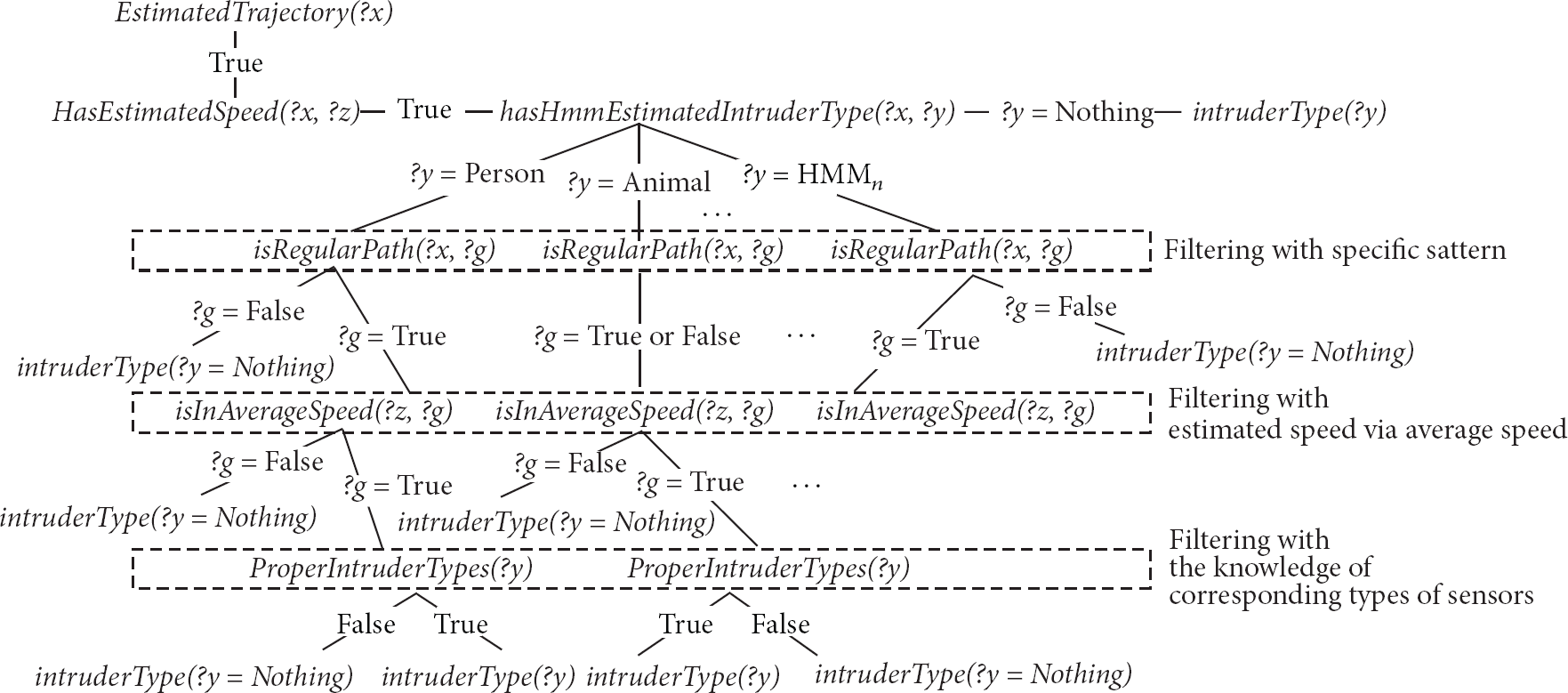
The rule tree for final decision.
The rules for # Final Decision Rules EstimatedTrajectory EstimatedTrajectory EstimatedTrajectory EstimatedTrajectory
# The restrict condition of an intruder movement (=Person) EstimatedTrajectory
The rule of EstimatedTrajectory
Knowing the type of the corresponding sensor to object is beneficial to determine the type of intruder. For example, Table 2 points out the sensors being available for the detection in given objects. From Table 2, this paper conducts ProperIntruderTypes rules shown in Table 3.
The corresponding sensors to an object.
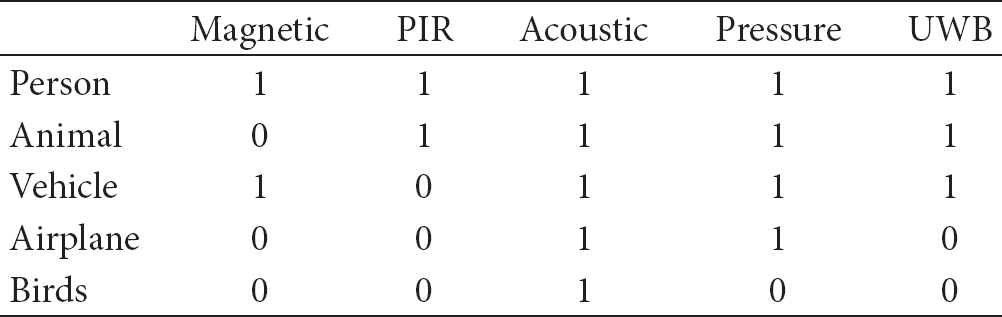
The rules for ProperIntruderType.

5. Experimental Result
5.1. The Sensor Field Applied for the Simulation
This paper produces simulated results through the sensor field comprised of different types of 36 sensors having 90 percent of detecting rate and 1 percent of false alarm rate. Figure 15 indicates the utilized sensor field for the simulation. We assumed that a sensor field is deployed along the road.
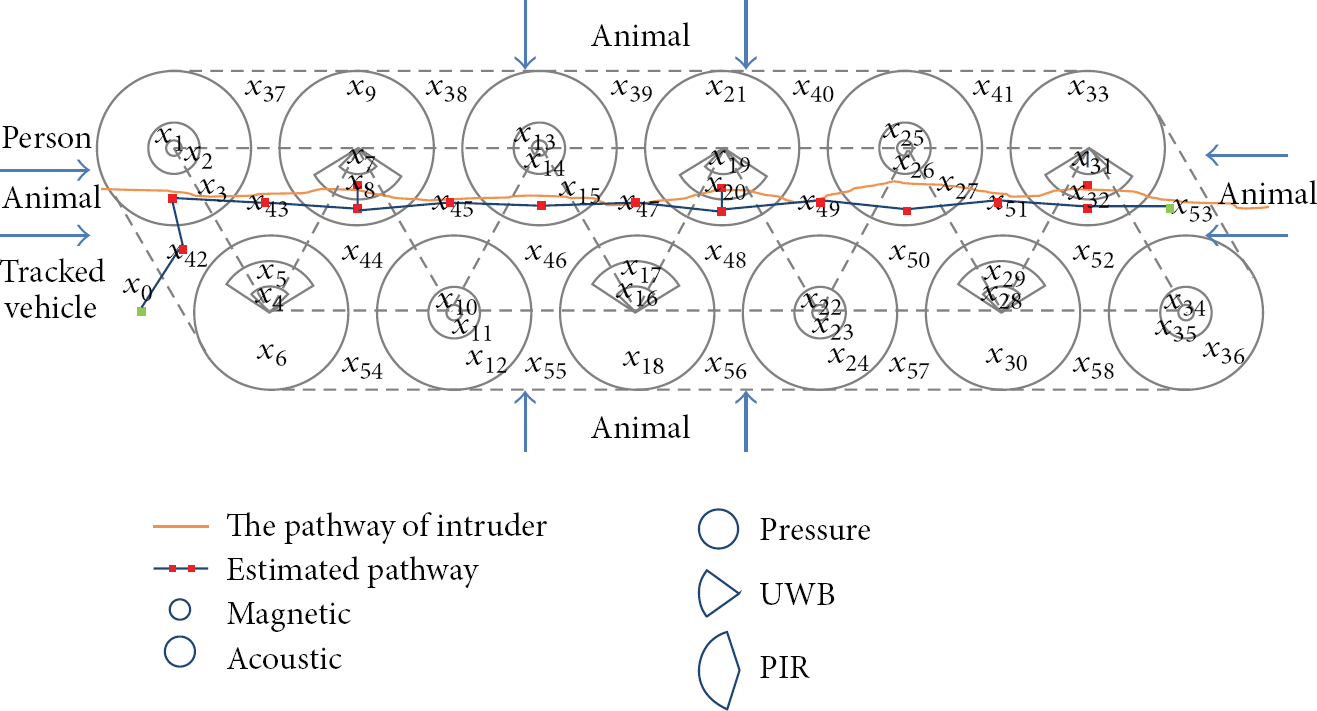
The sensor field simulated.
We conduct three kinds of HMM model which are “Person,” “Animal,” and “Tracked Vehicle” with parameters of Gaussian mobility model. Among those models, this paper defines the possible types of intruders (target objects) on the sensor field as “Person” and “Tracked Vehicle.” The other incoming objects are classified as nontarget objects of a sensor field (animal, airplane, and other clutters). Assume that the expected initial points of intruders are “
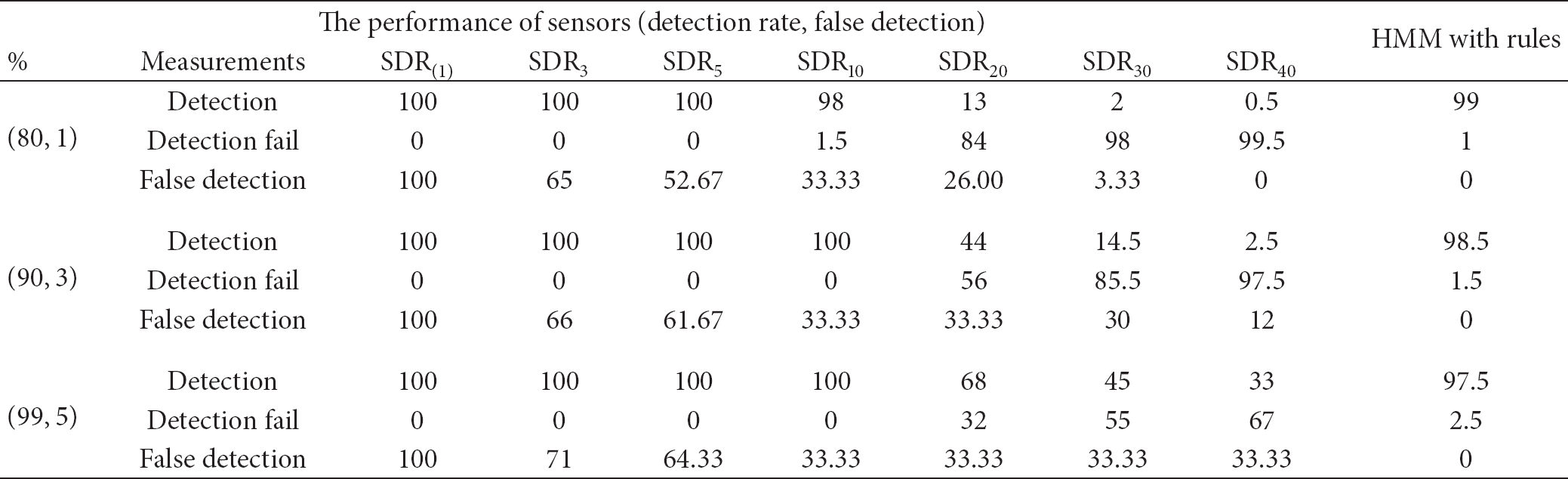
5.2. The Performance of Our Approach Using HMM with Rules for Intruder Detection
The performance of Table 4 is measured by three kinds of a sensor field. Each sensor field has Detection rate of sensor: Intruder detection rate of a sensor field False detection rate of a sensor field Detection fail of a sensor field No response of a sensor field
The performance of intruder detection using HMM with rules.

Note that
5.3. The Effectiveness Analysis of Our Approach
Our approach is mainly designed to focus on reducing Random noise: random observations Airplane: simultaneously, pressure and acoustic sensors only react Animal*: force magnetic sensor to react with animal movement; make every movements pass by an magnetic sensor at least once.
The results of false detection simulation with a sensor field (detection rate: 0.9, false alarm rate: 0.01 for sensors).

From the thresholds for stochastic decision, “Random Noise” and “Airplane” are filtered as “Nonintruder.” In case of “Animal*,” the sequences of observations are classified into 91% of Person and 9% of Animal. Hence, “Misclassification rate” is measured as 1 because by definition of “Animal*” the movement of that should not be classified as Person, Animal, and Tracked Vehicle.
The interesting point in Table 5 is that nine movement patterns of “Animal*” are classified as animal. Basically, magnetic sensors do not react with animal movements. As a result, in principal, the emission probability of HMM for “Animal” (
Decision-making performance.

Decision-making performance.
We conduct
As the final simulation, we investigate the possibility finding out the initial point for decision-making process. We recognized that once enough observations are accumulated, then the movement decoding using Viterbi algorithm is properly operated. From this point, we assume that finding out the number of consecutive sensor alarms would be beneficial to the movement estimation of objects by delaying the initial activation time of HMM. As an example, we investigate person's movement with 100 times random samples. Figure 17 represents the tendency of conditional probability that intruder exists on a sensor field and consecutive sensor alarms at the time t. The probability that an intruder exists on a sensor field is calculated with

Consecutive sensor alarms.
6. Conclusion
In this paper, we consider a decision-making methodology for intruder detection by synthesizing the decisions on sensor network. This paper especially adopts the HMM to combine individual sensor decisions in stochastic manner and applies rules for the enhancement of the final decision. Firstly, using the HMM, this paper collects decisions of individual sensors on a sensor field and retrieves an estimated movement of a moving object. The obtained movement pattern is employed to identify the type of an object on the sensor field by taking advantage of spatial-temporal information. In this way, retrieved movement patterns on a sensor field contribute to the judgment of intruder detection beyond the simple use of signal values from individual sensors with some thresholds in their decisions. Secondly, this paper uses rules to enhance the stochastic decision obtained from the HMM. In principle, the HMM makes a decision by a given transition and emission probabilities under the assumption that all events have probabilities to occur. However, there are worth axioms and knowledge for a decision making on a sensor field that contradicts the assumption of probabilistic model (HMM). This paper adopts these knowledge and axioms as rules to enhance the decision of sensor field. As an example, this paper conducts several rules representing specific movement patterns of objects, the average speeds of the movements, and the sensor types which respond to specific objects. Since any kind of knowledge can be expressed by the rules, this proposed methodology could be easily extended for other purposes.
The contribution of this paper can be summarized as follows. First, this paper proposes the dynamic discretization method for the construction of the state space in a sensor field. Any shape of a sensor field is dynamically represented as a state space for the HMM through the proposed discretization method. Second, this paper provides a decision-making methodology for intruder detection on a sensor field by using HMM and rules, and its performance is evaluated with simulations.
Footnotes
Acknowledgment
This research was supported by the Basic Science Research Program through the National Research Foundation of Korea (NRF) funded by the Ministry of Education, Science and Technology (2010-0024532).