
Abstract
There is a tradeoff between routing efficiency and energy equilibrium for sensor nodes in wireless sensor networks (WSNs). Inspired by the large and single-celled amoeboid organism, slime mold Physarum polycephalum, this paper presents a novel Physarum-inspired routing protocol (P-iRP) for WSNs to address the above issue. In P-iRP, a sensor node can choose the proper next hop by using a proposed Physarum-inspired selecting next hop model (P-iSNH), which comprehensively considers the distance, energy residue, and location of the next hop. As a result, the P-iRP can get a rather low algorithm complexity of
1. Introduction
With the development of communication, electron, and sensor technologies, wireless sensor networks (WSNs) have attracted wide concern of both researchers and application providers. WSNs consist of large numbers of sensor nodes deployed over a certain region. Each sensor node is a low-cost, short range wireless transceiver typically equipped with a low-computation processor and a battery operated power supply. Under many scenarios, the sensor nodes need to operate without battery replacement for several years. Thus, there are two questions need to be considered. One is how to achieve energy balance of these nodes to avoid the emergence of energy holes which commonly take place around the sink, since the data traffic follows a many-to-one communication pattern and nodes nearer the sink have to take heavier traffic load. The other is how to obtain high routing efficiency under multihop transmission circumstance, since WSNs can contain hundreds of such low-cost sensor nodes. Therefore, designing such networks should primarily focus on both routing efficiency and energy equilibrium in terms of trade-off.
Location-aware routing protocols seem to possess high routing efficiency, where GPS, phone, or other techniques are used for positioning nodes [1]. However, there are two extremes in location-aware routing—the greedy strategy and the robust strategy. Greedy strategies may suffer failures to route packets to destination, while robust strategies need very high flooding rates to ensure reliability and rapid delivery of data. Thus, many location-aware routing protocols are mostly to propose methods to overcome the mentioned drawbacks [2–4]. The energy-aware routing attracts more researchers' attentions than that of location-aware routing for the significance of energy. There are many results relating to energy-aware routing recently [5–8] to save energy or prolong WSNs' lifetime, where energy harvesting [9] is shown to be a promising technique.
Unsurprisingly, the combination between location-aware routing and energy-aware routing becomes another researchers' focus to balance energy and efficiency for WSNs' routing protocol [10, 11]. In addition, some researchers focus on other aspects of WSNs' routing protocol, for example, the distributed characteristic [12, 13] and the trade-off of other two or more indexes [14, 15].
In recent years, the slime mold Physarum polycephalum, a large single-celled amoeboid organism, becomes a new researchers' pet and has shown to be a good technique for solving the shortest-path problem, since it can adapt its organism to forage for patchily distributed food sources, as shown in Figure 1. In this paper, we draw the inspiration from the Physarum, introduce the Physarum model into WSNs, and improve it through ignoring its dimension and preserving its logical meanings to make it suit for routing selection based on our prior works [16–20]. Our focus is to choose the proper next hops to transmit data to sink in thinking of both routing efficiency and energy equilibrium, which is partially similar to [11].

Photographs of Physarum. (a) Physarum is able to make complex comparisons between two food options based on the quality difference of the food and riskiness of the feeding environment, which comes from http://sydney.edu.au/news/sobs/1699.html?newsstoryid=4576. (b) Example of maze solving by Physarum, which comes from paper [25]. (c) Example of connecting path in a uniformly illuminated field which comes from http://cmr.soc.plymouth.ac.uk/research.htm. (d) Comparison of the Physarum networks with Tokyo rail network, which comes from paper [26].
The rest of this paper is organized as follows. Section 2 gives a brief description of related work. Section 3 formulates the proposed models. Section 4 details the P-iRP. Section 5 discusses the feasibility of P-iSNH. Section 6 evaluates our P-iRP by simulations. Finally, the conclusion is presented in Section 7.
2. Related Work
In the aspect of efficient routing, GPSR [2] is a famous greedy routing protocol, which makes greedy forwarding decisions using only information about a router's immediate neighbors in the network topology. Li et al. [21] present a neural network approach to plan the shortest path from the target position to the start position in real time. Kuhn et al. [3] utilize face (or perimeter) routing to go around voids in the topology. Padmanabh et al. [4] consider unbiased random walk on a regular deployment of nodes, forming a hexagonal lattice pattern.
In the aspect of the energy-aware routing, Trajcevski et al. [5] construct a data aggregation tree that minimizes the total energy cost of data transmission, which is shown as an NP-complete problem, and propose algorithms for addressing it. A battery aware power allocation model was studied in [6] for a single-hop transmission scheme to balance the network energy consumption based on the nonlinear battery parameters proposed in [7]. Chau et al. [8] consider that a portion of the lost charge can be recovered due to the battery's recovery effect and present a battery model. The approaches propose some of the routes that would otherwise need to bypass the hole along the boundary and should start to deviate from their original path further from the hole instead.
Moreover, distribution and clustering problems are also important branches of WSNs' routing. Li et al. [13] consider the problem of nonlinear constraints defined on a graph and give a better solution incorporated with Laplacian eigenmap as heuristic information to solve the problem in distributed scenarios. For maximizing the network lifetime, Rao and Fapojuwo [22] present a battery aware distributed clustering and routing protocol which incorporates the state of the battery's remaining charge and health parameters in computing the charge utility metric at each cluster formation round. Wang and Syue [23] propose a relay selection protocol based on geographical information, in which multihop transmission is realized by concatenation of single cluster-to-cluster hops, where each cluster-to-cluster scheme forms the simplified cooperative network that consists of a single source destination pair and a set of available relays.
However, the trade-off is not comprehensively considered in those papers, which is very necessary for WSNs' routing due to the features of WSNs, for example, nodes' failures, limited bandwidth, and power energy. Bai et al. [10] route the connections in a manner that link failure does not shut down the entire stream but allows a continuing flow for a significant portion of the traffic along multiple paths to address the issues of reliability and energy efficiency. Trajcevski et al. [24] present heuristic approaches to relieve some of the routing load of the boundary nodes of energy holes in location-aware WSNs to balance load and latency. Yu et al. [11] use energy aware neighbor selection to route a packet towards the target region and recursive geographic forwarding or restricted flooding algorithm to disseminate the packet inside the destination region. By allowing the battery to rest for certain duration, without being subjected to heavy loads, Yang and Heinzelman [14] propose sleeping multipath routing, which selects the minimum number of disjoint paths to achieve the trade-off of given reliability requirement and energy efficiency. Sivrikaya et al. [15] propose randomized routing based on Markov chains to balance the load and routing performance.
In recent years, the Physarum becomes a new focus of bioinspired method. It is also the original source of our inspiration. Nakagaki et al. [25] validate that the Physarum is apparently able to solve shortest path problems as shown in Figure 1. They build a maze, cover it with pieces of Physarum (the Physarum can be cut into pieces that will reunite if brought into vicinity), and then feed the Physarum with oatmeal at two locations. A few hours later, the Physarum retracts to a path that follows the shortest path connecting the food sources in the maze. Tero et al. [26] use Physarum forms networks comparable efficiency, fault tolerance, and cost to those of real-world infrastructure networks—Tokyo rail system. Tero et al. [27] propose a mathematical model for the behavior of Physarum and argue extensively that the model is adequate.
3. System Models
Our research is built on three assumptions. The first is that all nodes are aware of their locations, which may be achieved through GPS receivers at network deployment time, employing a distributed location discover algorithm shortly after deployment or adopting other positioning methods [1, 28]. The second is that each node is aware of its energy residue [22]. The third is that the link is bidirectional, that is, if a node hears from a neighbor, then its transmission range can reach to the neighbor.
3.1. Typical WSNs Scenario
We consider the large multi-hop WSNs which consist of n static sensors. Each node i has a fixed circular transmission range r which determines the set of sensors in which each node can communicate with node i in one hop. We abstract such WSNs using a graph
We suppose that node s is the source node and node d is the sink, as shown in Figure 2. In most cases, the sink d is placed in the middle of WSNs field to ease traffic burdens of nodes in the right of the WSNs field. In this paper, we only think of the nodes in left of the WSNs field for simplicity and clarity. The transmission range of s is drawn as a dashed circle whose radius is r and center is s. We call the angle θ is the angle of deviation of node c, which represents a measurement of node c deviating from the sink d. The Euclidean distance of any two nodes, i and j, and the angle



An example of sensor nodes' deployment in WSNs.
If the node s needs to transmit data to sink d, it will select its next hop in the dashed circle. Since our scenario is location aware, we select the next hop in the right semicircle under normal circumstances. Obviously, the smaller the angle θ is, the closer the next hop is to the sink for a fixed distance. That is to say, we are apt to choose the node whose θ is smaller as the next hop. In order to avail discussion, we define the

In addition, the energy residue of each node is also important for choosing next hop for balancing the energy of WSNs' nodes. When a node chooses its next hop, it would consider the energy residue of the candidates and be apt to pick the node which has much higher energy residue as the next hop. Therefore, it is important to acquire the energy residue of neighbors.
We think of the basic theory of wireless transmission combined with Figure 2 and the data packet format shown in Figure 3(a). If node s transmits a group of data to node c, all of the nodes in

Formats of data packets.
In order to acquire the energy residue of neighbors, we add a new field ER to the packet header, which is shown in Figure 3(b). When node s transmits a group of data to node c, all of the nodes in
Since each node needs to listen in real time to every packet and try to match its field NA, only adding an operation of saving ER would not add a considerable effect on energy consumption. Therefore, we neglect the cost of acquiring energy residue of neighbors.
3.2. Physarum-Inspired Path-Finding Model
Papers in [25–27] exploit the slime mold Physarum polycephalum to develop a Physarum-inspired path-finding model (PiPf). Suppose that (1) the initial shape of a Physarum organism is represented by a graph, (2) the edges represent plasmodial tubes in which protoplasm flows, and nodes are junctions between tubes, (3) the pressures at nodes i and j are

Equation (4) represents that the flux through the tube
Suppose that the capacity of each node is zero, the conservation law of each node is calculated from the following:
Equation (5) illuminates the flux relationship in each node. In the source node s, I is the flux flowing from it; in the sink node d, I is the flux flowing into it; and in intermediate nodes, the sum of flowing from and flowing into is zero.
Physarum forages for distributed food sources through the adaptive behavior of the plasmodium. The adaptive behavior is illustrated as follows combined with Figure 4(a), where two food sources are connected by two tubes. Because of


(a) If two food sources are connected by two tubes, the longer tube will vanish with time going by. (b) If there are two candidates for next hop, the node that has the greater
Equation (6) illustrates the variation relationship of the conductivity with time to accommodate the flux distribution of the multipath transmission. In equilibrium (
The PiPf consisting of (4), (5), and (6) describes the evolutionary process of Physarum to solve the path-finding behavior of self-organized networks.
3.3. Physarum-Inspired Selecting Next Hop Model
In this section, we improve the PiPf and make it fit for routing in WSNs based on dimensionless analysis method. That is to say, we improve the PiPf to achieve a Physarum-inspired selecting next hop model (P-iSNH). In order to obtain that, there are two problems that need to be solved. The first is which physical quantities are used to replace the conductivity
Equation (4) derives from fluid dynamics.
First, because the
Second, the meaning of
Third, we discuss the

Then, we discuss how to choose the proper next hop. As related in Section 3.2, since

4. P-iSNH Based Routing Strategy and Algorithm
4.1. Data Conserved
In this section, we introduce the data which should be conserved in each node. Because of the same characteristic of each node, we suppose that the
Each node i needs to conserve the following information:



Conserved data structures.
4.2. Routing Strategy
If node s needs to send data to the sink d, it searches for a routing in the following method. We illustrate the routing strategy combined with Figure 6.

Process of routing selection.
Step 1.
Each
Step 2.
Each node
Step 3.
The first node in
Step 4.
If the next hop a of node s satisfies
Step 5.
If
Step 6.
Otherwise, each
Step 7.
The process is repeated, like a rolling wheel, until the sink d is found.
4.3. Routing Algorithms
Given the data conserved and routing process in the preceding sections, the P-iRP's algorithms of initialization, regular processing routine, receiving routine, and specific processing routine are described by Algorithm 1, Algorithm 2, Algorithm 3, and Algorithm 4, respectively.
(1) (2) (3) (4) (5) initializing and normalizing (6) (7) (8) calculating (9) (10) (11) (12) (13) calculating (14) (15) initializing and normalizing (16) (17) (18) (19)
(1) (2) calculating (3) save j and (4) (5) (6) (7) (8) send P;
(1) (2) node i sleep; (3) (4) wake node i; (5) (6) (7) go on sleeping; (8) (9) receiving packet P; (10)
(1) (2) (3) (4) (5) (6) send P; (7) (8) (9) calculating (10) save j and (11) (12) (13) (14) (15) send P; (16) (17)
Based on the WSNs scenario in Section 3.1, suppose that the degree of graph G is
5. P-iSNH Analysis
In this section, we analyze the feasibility of P-iSNH by mathematical theoretical analysis. We study the cases in which two nodes connected to the same node compete to be the next hop, as shown in Figure 4(b).
There are four nodes i,

Since
Setting

After some calculations, we obtain

Namely, there is an equilibrium point given by

Simulation of the solution. In
We present a linear stability analysis at the equilibrium point in before parameters. The Jacobi matrix J on the right-hand side of (13) is calculated as



Note that δ is the decay rate of

Since we set
6. Simulation Results
We design a simulation platform using C++ to validate P-iRP. In the simulation, 441 sensors are relatively regularly deployed in the field of 200 m × 200 m, and the sink node is deployed in the right of the field, shown in Figure 8. The sensing radius of each sensor is 30 m, the original energy of each node is 100, and the energy of sink node is inexhaustible. We suppose that the energy consumption of one transmission is 1, if the transmission distance is 20 m. Therefore, the energy consumption of one transmission of two nodes i and j is

Sensor nodes deployment.
In order to validate the energy equilibrium, we only choose the nodes in the field of
6.1. Energy Equilibrium of P-iRP
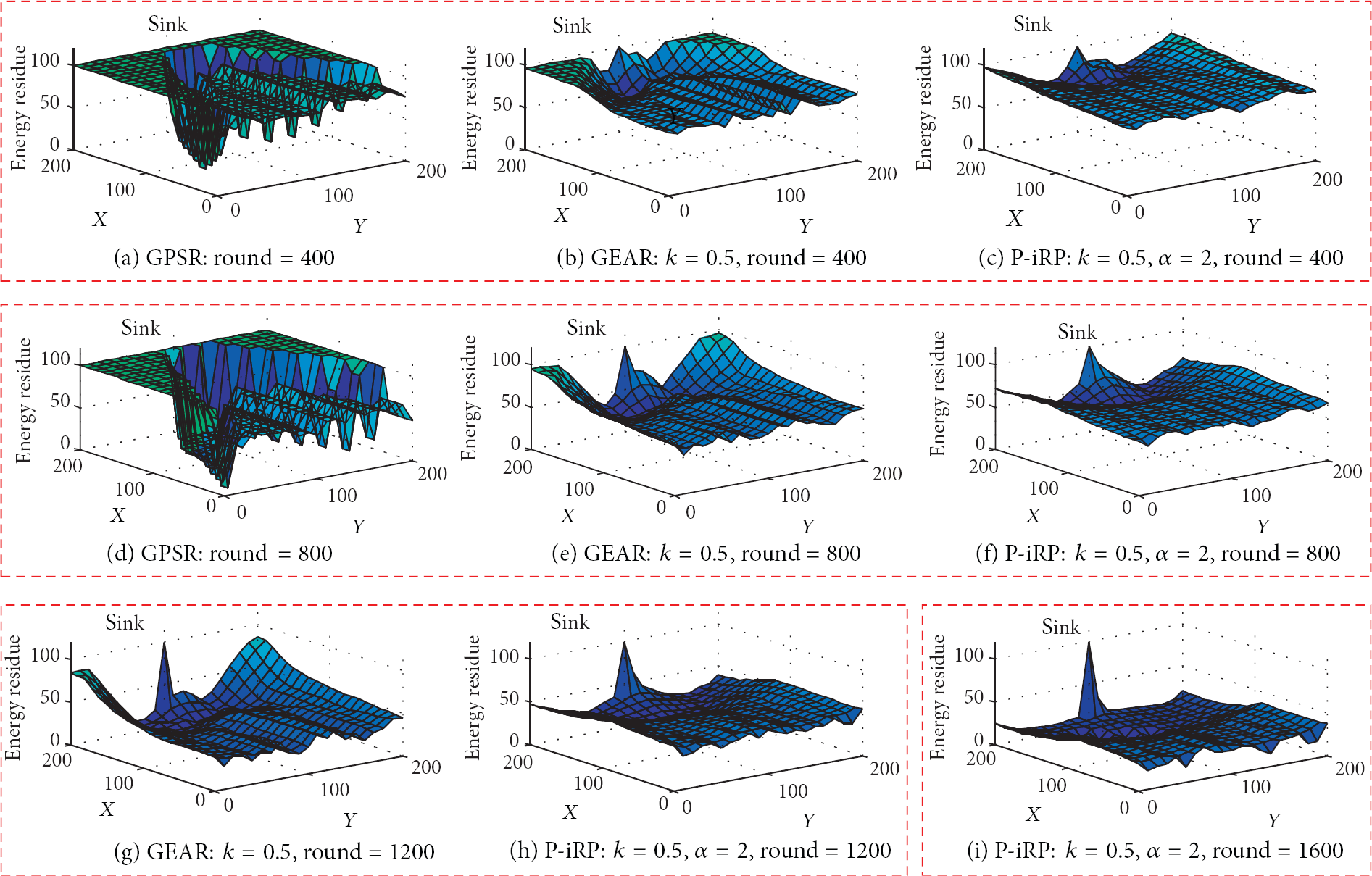
Figure 9 illustrates the energy distribution of GPSR, GEAR (
Hops of transmission of each round.
Figure 10 illustrates the lifetime of WSNs. In GPSR, the first dead node emerges in round of 192, and the WSNs break down in round of 889. In GEAR (

Lifetimes of WSNs.
Figure 11 illustrates the dead nodes distributions of GEAR (

Distributions of dead sensor nodes.
The reasons to gain the results of Figures 9, 10, and 11 are that (1) since GPSR does not take energy into account, it utilizes frequently the “hot” nodes to result in imbalanced energy distributions, (2) since GEAR and P-iRP consider both energy and location of nodes, their energy distributions are rather balanced, and (3) since P-iRP is more elaborate in energy utilization than GEAR, the energy distributions of P-iRP are more balanced than those of GEAR.
6.2. Efficiency of P-iRP
Figure 12 illustrates the number of hops that the different algorithms need in different rounds of transmission. By calculating, the average hops of GPSR, GEAR (

Hops of transmission of each round.
In case of
In case of
In addition, Figure 12 implies that (1) GPSR can get much higher routing efficiency than those of GEAR and P-iRP at initial periods of time in WSNs' lifetime, but its efficiency decreases exponentially with the time going, and (2) the routing efficiencies of GEAR and P-iRP are almost the same at initial periods of time in WSNs' lifetime, while the difference becomes gradually large with the time going. The reasons to gain those results are that (1) since GPSR does not take energy into account, the routing efficiency will decrease exponentially after dead nodes emerge and (2) P-iRP can outperform GEAR in routing efficiency, since P-iRP considers comprehensively the distance, energy residue, and location of the next hop, other than only considering energy and location in GEAR.
7. Conclusion
The Physarum forages for patchily distributed food sources through accommodating its body to form networks with comparable efficiency, fault tolerance, and cost, which is the source of P-iRP's inspiration. For the proposed scenario, the P-iRP ensures the passage of data packets through one by one static sensor nodes to reach the sink. In each intermediate node, the P-iSNH is used to choose the proper next hop. Once an energy hole emerges, a specific processing will be triggered to bypass the hole. The theoretical analysis and simulation results show that the P-iRP possesses many advantages, for example, rather low algorithm complexity for P-iRP, ever-present equilibrium solution for P-iSNH, and effective trade-off between routing efficiency and energy equilibrium compared to other famous algorithms, which greatly reduces the processing delay and saves the sensors' energy and also demonstrates that the P-iRP is applicable to the proposed scenario. Furthermore, we consider that the model may also provide a useful help to develop the routing protocol in mobile ad hoc networks, which will be our future focus.
Footnotes
Acknowledgments
This work was partially supported by the National High-Tech Research and Development Program of China (863 Program) under Grant no. 2011AA010701, in part by the National Basic Research Program of China (973 Program) under Grant no. 2013CB329102, in part by the National Natural Science Foundation of China (NSFC) under Grant nos. 61003283, 61001122, 61232017, U1204614, 61003035, and 61142002, and in part by the Natural Science Foundation of Jiangsu Province under Grant no. BK2011171.