
Abstract
The primary motivation for developing vehicular safety applications is to provide information and assistance required to avoid collisions. Such applications depend on performance of vehicular communications which have critical requirements for various operating scenarios. However, there is still a lack of practical performance measurement data in the open literature that can be used to design robust and reliable applications for vehicle safety. This paper provides an overview of the current standards for vehicular communications and requirements for vehicular applications and analyzes ad hoc performance of commercial off-the-shelf DSRC and Wi-Fi radios in real vehicular environments. Also, it identifies important effects of messages size, message frequency, weather condition, and vehicle mobility on vehicular communications. For example, rainy weather significantly diminishes the communication range and vehicle mobility causes temporal variations in communication throughput. With a better comprehensive understanding of these effects on performance and reliability, quality of vehicular applications can be significantly improved.
1. Introduction
Dedicated short-range communication (DSRC) is designed to support a variety of applications based on vehicular communications. It is already in trial use and its products are out on the market. As vehicular communications rely on standards to ensure interoperability between vehicular equipments, there have been several international and regional standardization efforts, particularly the United States and Europe. In the US, for example, DSRC adopts IEEE 802.11p standard [1] for wireless access for vehicular environments (WAVE). IEEE 802.11p is based on IEEE 802.11 standard [2] for the physical (PHY) and medium access (MAC) protocol layers [3]. DSRC also employs a suite of IEEE 1609 standards [4–6]: 1609.2 (security services), 1609.3 (network services), and 1609.4 (multichannel operation) for the upper protocol layers. Most of these standards are recently published.
One important reason for the use of IEEE 802.11p, an amendment to the IEEE 802.11 standard, is that it may encourage IEEE 802.11 (Wi-Fi) manufacturers to support DSRC, which would spur rapid penetration of DSRC and efficiently lowering deployment costs. For instance, the majority of the commercial off-the-shelf DSRC radios currently have an embedded IEEE 802.11a Wi-Fi chipset. Since IEEE 802.11p employs the orthogonal frequency-division multiplexing (OFDM) technique for the PHY layer, which is originally adopted by IEEE 802.11a [7], DSRC radios using IEEE 802.11a Wi-Fi chipsets can support IEEE 802.11p to achieve fast and robust connections to moving vehicles by modifying the PHY and MAC layers of the IEEE 802.11 standard. However, DSRC radios are still not expected to penetrate the market with affordable prices until the deployment of DSRC equipment in vehicles is regulated, which will result in a demand for high-volume production.
Many current wireless network deployments are based on Wi-Fi technology that uses IEEE 802.11 standards, specifically 802.11a/b/g/n, to provide a high-speed network connection in wireless environments. The IEEE 802.11 standards were originally developed for extending wireless communication links between indoor local area network (LAN) equipments, but the use of Wi-Fi in outdoor environments has expanded quickly due to its high capacity and reliable coverage. For vehicular communications, the existing and emerging Wi-Fi technologies provide high throughput, predictable range, and a variety of physical diversity mechanisms, thus ensuring network performance and reliability while lowering deployment costs. For this reason, DSRC radios are already employing Wi-Fi chipsets and IEEE 802.11p standard. Hence, the Wi-Fi technology can be investigated for vehicular networks to provide better usability and interoperability using existing pervasive Wi-Fi-based smart devices and infrastructures.
Vehicular networks have generated considerable research interests, where many researchers have proposed various solutions. However, it is difficult to determine if the solutions can be implemented in practice and if they are really reliable in practical implementation. This difficulty arises because most of prior research was developed and evaluated in typical network simulators based on limited scenarios and physical models including vehicle mobility and channel characteristics [8]. As the costs of real implementation and field experiments are extremely high, extensive measurements in vehicular environments are difficult. Most of the previous field experiments [9, 10] have focused only on measuring channel characteristics due to vehicle mobility in order to develop vehicular simulation models, for example, vehicle-to-vehicle (V2V) propagation channel model.
For vehicular application design, application requirements are derived from implementations that depend on the performance of vehicular communications, particularly DSRC. However, little attention has been paid to the performance of practical communication links in vehicular environments, such as effective single-hop communication range, available bandwidth (or sending rate), data loss, and latency time (or variation of delays). For example, road safety applications, for example, collision avoidance, need to transmit safety messages at 10 Hz, which should be received within a minimum range of 100 ms to track others' movement and take action to prevent potential collisions [11]. As each vehicular application has critical performance requirements, an approach that focuses on how to reliably satisfy the minimum performance requirements is necessary. Although some performance measurements have been reported, most of them are related to channel fading statistics. There still remains a need for pragmatic measurements of performance in real operating environments.
The goal of this study is to investigate the ad hoc performance of the promising technologies, DSRC and its base Wi-Fi standard, for vehicular communications, which can be a critical baseline for vehicular application design. In this work, there are three major discoveries from our experiments, which are the main contributions of this paper.
We report performance measurements of ad hoc links using off-the-shelf DSRC and Wi-Fi radios at adjacent 5.860 GHz (DSRC) and 5.825 GHz (Wi-Fi) in real vehicular environments including a parking lot, test track, and highway. Our results show that performance of User Datagram Protocol (UDP) and broadcast, two most popular transport layer protocols in vehicular applications, is significantly affected by the size and rate of transmitting messages, which has an important impact on bandwidth efficiency in safety application design. We conducted field experiments under both sunny and rainy weather conditions to examine the effects of weather changes. Prior work provides just good results in clear weather conditions, many of which are based on nonrepresentative and nonreproducible measurements, but we present measurements showing that rainy weather substantially diminishes the radio communication coverage. The performance degradation from the varying weather condition has an important impact on reliability of vehicular safety applications. Our measurements indicate that ad hoc performance within desired communication coverage areas is quite stable even if the communicating vehicles are moving, whereas the performance shows a significant drop in throughput and substantial increase in data loss at longer ranges or varying distances. This suggests that the use of half channel bandwidth (10 MHz) has advantages (e.g., sustainability with channel fading and interference) and disadvantages (e.g., small communication capability) in performance and reliability.
The rest of this paper is organized as follows. We first introduce the background and work related to our study in Section 2. We then describe the details of our experimental setup including hardware setting, network configuration, and performance measurement procedures in Section 3. Then, we present and discuss our experimental results in Section 4 and conclude our investigation in Section 5.
2. Background and Related Work
In this section, we give an introduction to existing and emerging standards for vehicular communications and performance requirements for vehicular safety applications. Also, we present an overview of critical characteristics of vehicular communication environments.
2.1. Standardization of Vehicular Communications
Vehicular communications rely fundamentally on standards to ensure interoperability among devices from different manufactures, which is also crucial for cost-efficient deployment. Kenney [3] and Ström [12] introduce in detail the current standardization efforts primarily conducted by the United States and Europe. Most of vehicle communication standards are recently published.
In the US, DSRC uses IEEE 802.11p [1] for wireless access for vehicular environments (WAVE) based on IEEE 802.11 standard at the PHY and MAC layers. In upper protocol layers, DSRC utilizes a suite of IEEE 1609 standards: 1609.2 [4] for security service, 1609.3 [5] for network services, and 1609.4 [6] for multichannel operation. DSRC also supports prevalent Internet Protocols for the network and transport layer, such as Internet Protocol version 6 (IPv6), User Datagram Protocol (UDP), and Transmission Control Protocol (TCP). IEEE 1609.3 defines the bandwidth-efficient WAVE Short Message Protocol (WSMP) for vehicular safety messages. In cooperation with IEEE 1609 standards, the Society of Automotive Engineers (SAE) International has been standardizing SAE J2735 [11] for Message Set Dictionary used by the WSMP and SAE J2945.1 draft [13] for minimum performance requirements. Figure 1 illustrates the protocol stack for vehicular communications in the US.
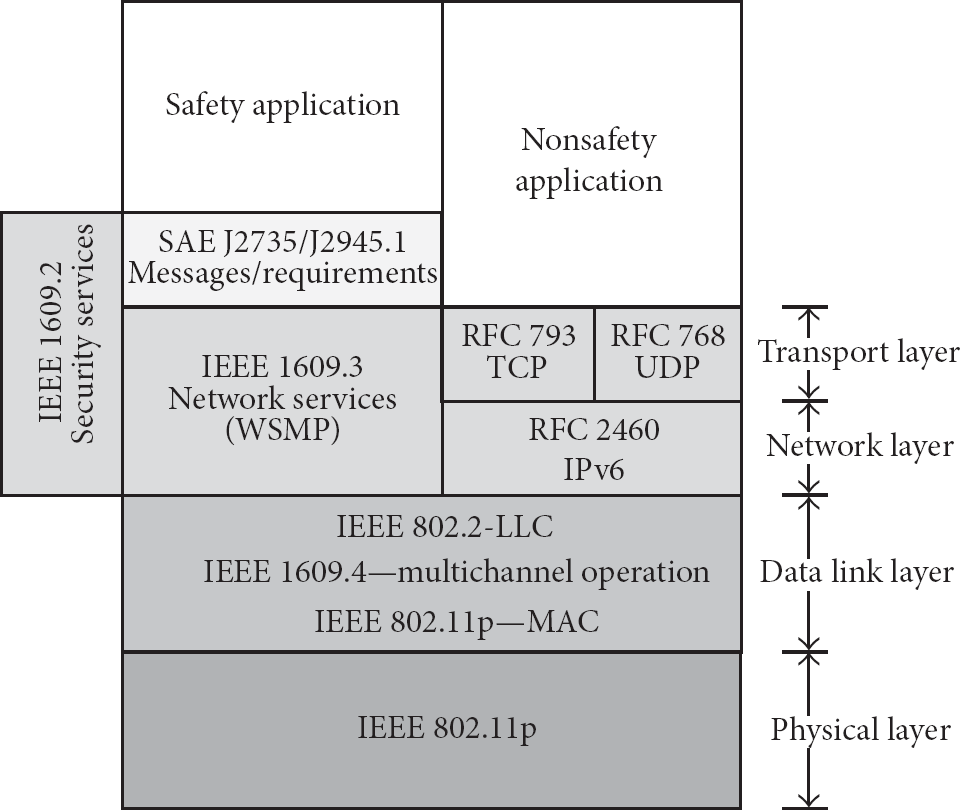
Protocol stack for vehicular communications.
In Europe, the European Telecommunications Standard Institution (ETSI) and European Committee for Standardization (CEN) have been developing the European Intelligent Transport System (ITS) architecture. The European standards are generally different from those of the US, mainly in higher network layers. For example, European DSRC radios simultaneously listen to two separate channels, the control and service channel, for traffic safety applications, whereas US DSRC radios utilize only one channel, the control or service channel, with time-division based channel switching operation as defined in IEEE 1609.4. However, both sides are adopting IEEE 802.11p as physical and MAC layer protocols, which probably allows cost-efficient high-volume production and compatible standardization.
IEEE 802.11p, which is the foundation of standardized vehicular communications (DSRC), is an amendment to the IEEE 802.11 standard [2] that employs Orthogonal Frequency Division Multiplexing (OFDM) in the PHY layer and a Quality-Of-Service (QoS) extension in the MAC layer. OFDM was originally added to the IEEE 802.11a amendment [7]. IEEE 802.11p is designed to provide the minimum set of specifications required to ensure interoperability between wireless devices attempting to communicate in potentially rapidly changing communication environments where transactions must be completed in much shorter time frames compared to ad hoc and infrastructure IEEE 802.11 networks. Hence, IEEE 802.11p describes the functions and services to operate in a rapidly varying environment and to exchange messages without joining a Basic Service Set (BSS), and defines the signaling techniques and interface functions controlled by the IEEE 802.11 MAC.
The main variation of IEEE 802.11p from the IEEE 802.11 standard (specifically referred to as 802.11a when focusing on the OFDM technique in the 5 GHz band as Wi-Fi still uses this term to group its products) is the half-clocked OFDM PHY operation using 10 MHz channel spacing; OFDM is widely adopted by recent wireless technologies (e.g., WiMAX and LTE). The half clock operation has data payload communication capabilities of 3, 4.5, 6, 9, 12, 18, 24, and 27 Mbps, using 52 subcarriers that are modulated by BPSK, QPSK, and 16-QAM with Forward Error Correction (FEC) coding rate of 1/2, 2/3, or 3/4. Compared to the OFDM operation with 20 MHz channel spacing, this operation doubles symbol times and clear channel assessment (CCA) times and increases the length of the guard interval (GI) to guard against longer delay spreads. It also halves the subcarrier spacing, which allows for greater frequency selectivity. Utilizing the OFDM technique of IEEE 802.11 standard allows IEEE 802.11 manufacturers to easily support the IEEE 802.11p amendment, which would result in the rapid penetration of vehicular radios with reasonable deployment costs. Table 1 lists the major parameters of the OFDM PHY layer in the IEEE 802.11 standard.
Major parameters of the OFDM PHY layer.

2.2. Requirements for Vehicular Applications
Geographic standardization for vehicular applications, which reflects regional regulatory constraints and emphasizes the distinct characteristics of operating environments, makes interoperability difficult. Karagiannis et al. [14] give a good introduction to vehicular applications and their requirements in the US, Europe, and Japan, summarizing the current and past major ITS projects in those countries. To provide a brief overview, this section focuses on the requirements of vehicular applications, based on the WAVE Short Message Protocol (WSMP) of IEEE 1609.3 and Basic Safety Message (BSM) of SAE J2735 in the US.
At the top of the IEEE 802.11p and IEEE 1609 protocol suite as illustrated in Figure 1, the SAE J2735 specifies a set of message formats that support a variety of vehicular applications. The most critical of these is the BSM that is used in multiple safety applications: Emergency Electronic Brake Lights (or Intelligent Brake Light Warning), Blind Spot Warning, Cooperative Adaptive Cruise Control, Cooperative Collision Warning, Cooperative Forward Collision Warning, Emergency Vehicle at Scene Warning, Lane Change Warning, Precrash Sensing, and so forth. In order to detect potential danger and take appropriate actions, the BSM provides situational awareness that includes the position, speed, and heading of all vehicles within range.
For instance, the Emergency Electronic Brake Lights (EEBL) application exchanges messages with other vehicles using the frequent BSMs that enable each vehicle to keep track of nearby vehicles and automatically apply brakes to prevent a collision between vehicles. As defined in the SAE J2735 standard, each moving vehicle updates and broadcasts its own BSM one way (i.e., message direction requirement) every 100 ms (i.e., message rate requirement) over the WSMP (i.e., priority requirement). Other nearby vehicles within a minimum range of 100 m (i.e., communication range requirement) detect this broadcast and process it. There is no handshaking or acknowledgment between the devices; there is no association or join process (i.e., priority requirement).
Although the SAE J2735 standard defines extensible messages sets including basic safety message, roadside alert message, and probe vehicle message for future vehicular applications, it is not sufficient to embrace all system capability requirements derived from a wide range of the use cases. Hence, emerging SAE J2945.1 standard is a work in progress to specify the minimum communication performance requirements of the DSRC message sets, associated data frames, and data elements defined in the SAE J2735 standard. SAE J2945.1 is expected to address optimal data rate, transmission power, data accuracy, security, QoS, and other specific performance requirements.
2.3. Characteristics of Vehicular Communications
Several measurement studies in typical vehicular environments have already been carried out by different researchers, for example, Cheng and Henty [9] and Alexander et al. [10], focusing on characterizing the 5.9 GHz DSRC channel in terms of path loss, fading, and propagation patterns. There have also been significant efforts towards developing statistical channel models for realistic simulations. Recent well-written reviews can be found in Molisch et al. [15] and Mecklenbraüker et al.'s work [16]. The characteristics of vehicular communications significantly differ from those of other mobile communications. These differences arise from the following specific features of vehicular environments.
In vehicular communications, the transmitter and receiver are mostly at the same height as the vehicles; for example, the height of most mid-size vehicles is 4 to 5 ft. Consequently, the propagation patterns are different from other mobile wireless links, where radios are placed high above the road level. The radio propagation of vehicular links is largely affected by horizontal obstacles at the same level, especially other obstructing vehicles such as trucks. Vehicular radios operate at high frequency (5.9 GHz band) which has high signal attenuation (or path loss). Moreover, channel fading is faster than any other mobile communications because both the transmitter and receiver are simultaneously moving in most cases. Therefore, the maximal range for effective communications is much shorter and communication performance is usually degraded with a large variation over a short period of time. The propagation patterns in vehicular communications are significantly affected by vehicle geometry and antenna placement. A transmitter does not provide uniform coverage in a circular pattern, which actually creates coverage in intricate 3D patterns. Although rooftop mounting is intuitively considered as the best placement for vehicular antennas, there is still a need to empirically investigate the impact of vehicular antenna mounting on communication performance. Vehicular radios operate at a high frequency under various weather conditions, where signal attenuation easily occurs as a result of absorption and scattering by such hydrometeors as rain, snow, cloud, and fog [17, 18]. In particular, wet snow may cause significant attenuation. Since examining the weather effects on the propagation and path loss in vehicular environments requires high expenses in cost and time, very few measurement experiments have been conducted to study weather-related effects on vehicular communications.
Although there have been standardization and characterization efforts to analyze vehicular communications as introduced in this section, there is still a lack of practical measurement data required for developing vehicular applications in the open literature. It should include communication performance between vehicles in real operating environments. Motivated by this fact, we carried out extensive measurements to gain a better understanding of the limitations and requirements for vehicular communications by comparing communication performance of DSRC and its base, Wi-Fi radios.
3. Experimental Setup
In our field experiments, we measured single-hop ad hoc performance of vehicular communications using two commercial off-the-shelf DSRC and small form-factor Wi-Fi platforms. The measurements were performed using two mid-size vehicles equipped with both DSRC and Wi-Fi platforms in typical vehicular environments.
The DSRC platform (MCNU R1500S) developed by Kapsch is compliant with the US 5.9 GHz DSRC standards such as IEEE 802.11p and IEEE 1609.2-4; in our experiments, only IEEE 802.11p was employed for the basic ad hoc configuration. The platform running Linux kernel 2.6.14 is equipped with an Atheros IEEE 802.11a chipset controlled by

Antenna placement for experimental platforms.
The Wi-Fi platform (MS-9A19) manufactured by MSI is a compact industrial system providing a mini-PCIe interface for the wireless adapter, which is suitable for vehicular use. An Atheros IEEE 802.11a/b/g/n chipset-based wireless adapter (Ubiquiti SR71-E) was used with two 7 dB omni-directional dipole antennas, which were mounted on the roof of each vehicle; see Figure 2. The transmission power is varied with the data rate (15–25 dBm). The platform runs Linux kernel 2.6.38 with the
Each set of DSRC and Wi-Fi experimental platforms was installed on the two mid-size vehicles; that is, each vehicle is equipped with both DSRC and Wi-Fi platforms, powered by the vehicle batteries. One in each set was configured as a transmitter and the other as a receiver. To investigate communication performance, we utilized
We carried out UDP and broadcast performance tests because they are the most common transport layer protocols in vehicular communications. These tests provide measurements that are suitable for evaluating communication performance including efficient single-hop communication range, available bandwidth (or data rate), data loss, and latency (or variation of delays). As the performance of a wireless link is usually affected by the surrounding channel conditions, the experimental results may exhibit variations. To eliminate this effect, we first measured the communication performance at 100 ft range with an unobstructed line-of-sight before each experiment and conducted our experiments only when all measurements reported negligible differences.
The vehicular ad hoc communications were evaluated in three different environments: open parking lot, test track, and highway. The parking lot with no interfering obstacle and people was used to explore the variation of performance at different communication ranges in different weather conditions. The test track, which is an oval-shaped track 1200 ft long, was selected to examine the change of performance due to vehicle maneuvers; see Figure 3. Finally, one of the major interstate highways in the US, I-85, was chosen to observe the communication performance at high speed in a practical traffic condition. Details of the experimental parameters, including experiment place and weather condition (e.g., temperature, humidity pressure, and wind speed), are summarized in Table 2.
Experimental conditions of measurement sets.

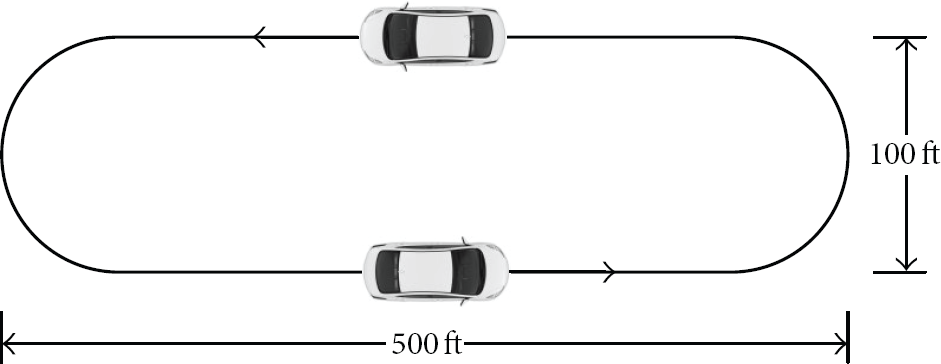
Test track and vehicle movement.
4. Experimental Results
This section presents our experimental measurements of ad hoc communication performance of DSRC and Wi-Fi radios in real operating environments and discusses practical considerations for designing and implementing vehicular applications based on the experimental observations.
4.1. Baseline Measurements of DSRC and Wi-Fi Performance
We performed preliminary experiments in our indoor laboratory with the experimental setup to present baseline measurements. These experiments are also intended to verify how the payload size (i.e., message length) affects the communication performance and what the maximum achievable performance (i.e., message rate) is. We measured the UDP and broadcast performance of each set of DSRC and Wi-Fi ad hoc links at 10 ft range, repeatedly running
Figure 4 shows results of the DSRC and Wi-Fi experiment. The maximum UDP throughput of 12.4 Mbps for DSRC and 22.0 Mbps for Wi-Fi was achieved with the datagram size of 1472 bytes. The maximum broadcast throughput of 2.5 Mbps for DSRC and 5.1 Mbps for Wi-Fi was relatively lower compared with the UDP throughput. The best datagram size of 1472 bytes was used in all the following experiments. According to our expectations, the Wi-Fi communication performs much better in this stationary configuration due to the use of full channel spacing (20 MHz). No data loss and a little variance of delay were observed during the experiments.

Measurement set I: laboratory.
As we can see from the measurements for DSRC and Wi-Fi in the preliminary experiment, packet size (i.e., message length) is a significant performance factor, which means that frequent short-message transmission may degrade overall performance of vehicular communication, especially when using UDP protocol. In the case of broadcast, moreover, the transmitter is not able to determine successful reception and retransmit unsuccessful packets due to the lack of acknowledgments for broadcast packets, which leads to network collisions and degradation in performance and reliability.
The design of vehicular applications has raised two key questions: (1) what is the most efficient message size? (2) how often should messages be sent? It is generally accepted that large messages increase processing overheads for modulation and coding, and frequent small messages easily saturate the radio channel. Thus, the sizes and sending rates (i.e., frequency) of messages for critical vehicular safety applications need to be carefully determined based on accurate measurements in specific operating environments to efficiently provide safety information in a timely manner.
4.2. Performance Comparison in Different Weather Conditions
To investigate how the performance of vehicular links varies over the communication range in vehicular environments, we conducted our experiments using two vehicles equipped with our experimental platforms in the parking lot; see sets II and III in Table 2 for details. We measured the UDP performance of each DSRC and Wi-Fi ad hoc communication link between the stationary vehicles at ranges of 150, 300, 450, and 750 ft in two different weather conditions, continuously running
Figure 5 displays two sets of DSRC and Wi-Fi measurements in typical weather conditions, sunny and rainy weather. The performance degrades as the communication range increases in both DSRC and Wi-Fi case, probably due to distance-dependant path loss. Compared to the preliminary measurements, the maximum achievable performance diminished greatly and the overall outdoor performance was not stable over the whole distance; especially, DSRC measurements at longer ranges (e.g., 600 and 750 ft) contain considerable data loss and jitter that may be caused by unreliable connectivity with small channel capacity. In addition, the rainy weather substantially reduces the effective communication range because signal attenuation at high frequencies easily occurs in rainy weather as described in the previous section. An interesting effect was observed at the range of 150 ft in rainy weather, where the performance was much better compared with the measurements in sunny weather. It could be speculated that rain also attenuated interfering signals, which led to clear channel at the short range. We also measured broadcast performance with the same experimental setup in all field experiments observing similar patterns to UDP performance, but those measurements are not presented in this paper for lack of space.

Measurement set II: parking lot.
Figure 6 contains another set of measurements at range of 150 ft in different weather conditions. In this experiment, to examine temporal variations in communication performance, we measured the UDP performance by continuously transmitting as many datagrams as possible and recording the measurements per second; this

Measurement set III: parking lot.
Although a quantitative comparison between DSRC and Wi-Fi could not be made due to the differences in transmission power and antenna pattern, we were able to get some measurements that illustrate how DSRC and Wi-Fi behave within the communication range under different weather conditions. Unfortunately, very few measurement studies that account for weather-related effects on vehicular communications, for example, propagation and path loss, have been conducted in any prior work. Thus, we believe that additional measurement studies on various weather conditions including severe weather such as storms are needed in order to design robust and reliable applications for dynamic vehicular environments.
4.3. Performance Comparison in Vehicle Mobility
We carried out our road experiments on the test track and highway to examine how the DSRC and Wi-Fi ad hoc performance between the two vehicles is affected by the vehicle maneuver and movement in sunny weather; see sets IV and V in Table 2 for the detail of experimental condition.
For the measurements on the test track, two vehicles on the opposite sides of the track started to move at the same time and went around the track continuously while keeping the speed of 10 mph with an unobstructed line-of-sight as illustrated in Figure 3. One vehicle was configured as a transmitter and the other as a receiver. We ran the
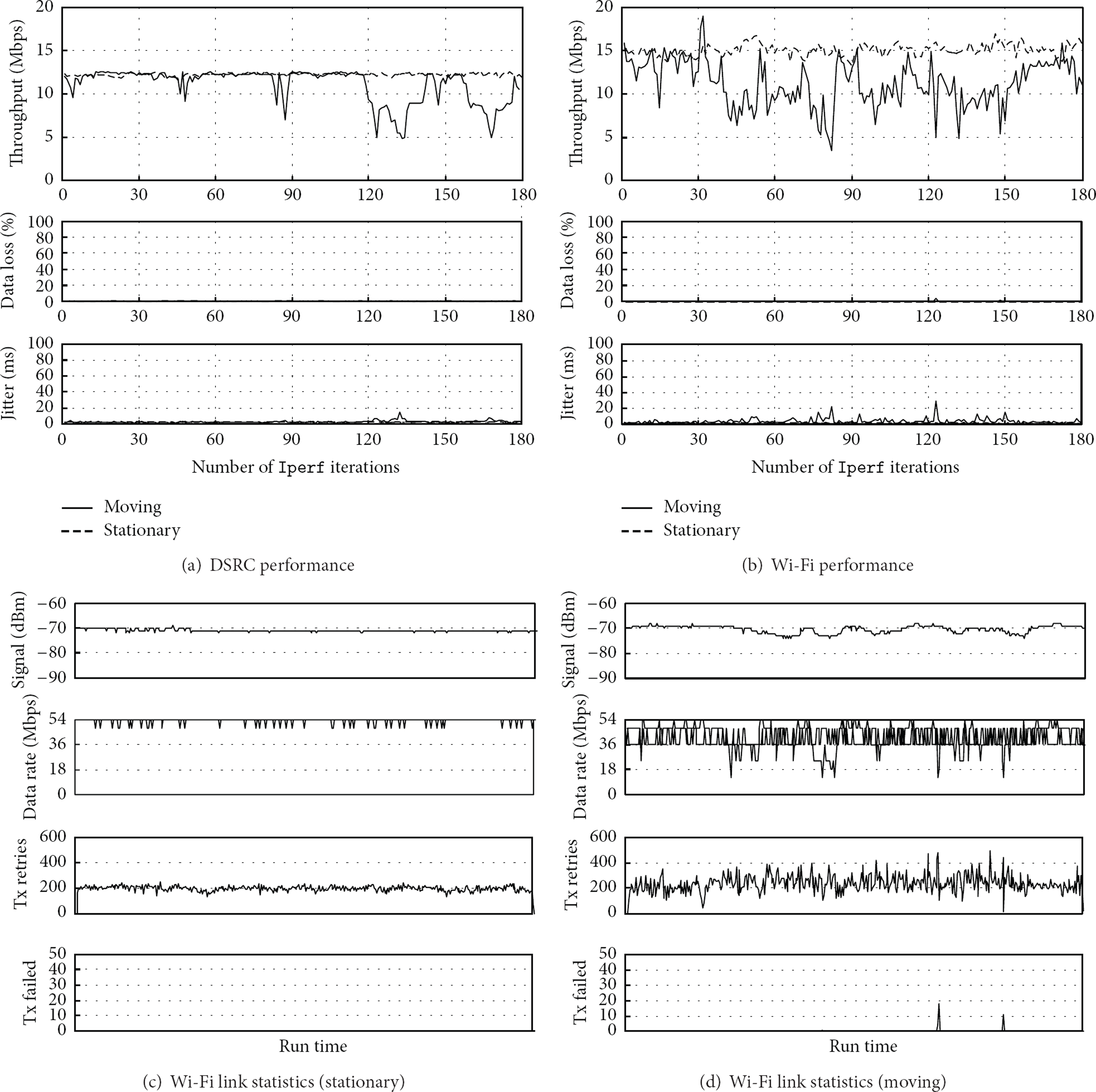
Figure 7 presents our measurements on the test track. The results of both DSRC and Wi-Fi communication link show wide fluctuations in performance. The communication range varied from 100 ft to 500 ft in a regular pattern that corresponds to the track shape and vehicle mobility, which made signal strength (quality) oscillate as illustrated in Figure 7(c). Apparently, the change of signal strength influenced the variations on performance and link statistics with similar pattern. Furthermore, the DSRC ad hoc link was frequently disconnected when DSRC antennas of the transmitter and receiver were facing each other horizontally. We experimentally found that our vehicular antennas for DSRC platforms do not have a uniform circular coverage; that is, there are horizontal blind spots. Thus, antenna pattern in vehicular communications has a major impact on reliability.

Measurement set IV: test track.
In the experiments on the highway, two vehicles moved at a speed of 60 mph while maintaining a distance of 150 ft between the vehicles with an unobstructed line-of-sight. The leading vehicle was configured as a receiver and the follower as a transmitter. We also measured the performance using
Figure 8 provides performance measurements with link statistics on the highway. By and large, the Wi-Fi result was unstable compared to the DSRC performance. This indicates that Wi-Fi protocols are more sensitive to the operating channel condition due to use of the wider channel bandwidth, and the rate adaptation algorithm,
Measurement set V: highway.
As observed in the field experiments, the temporal variations on communication performance arising from dynamic vehicle maneuver and movement in practical environments may have a significant impact on the reliability of critical vehicular applications.
5. Conclusion
As vehicular communications rely on standards to ensure interoperability between vehicular equipment, there have been great efforts for international and regional standardization. In the US, DSRC utilizes a combination of standards: IEEE 802.11p (an amendment to the IEEE 802.11 standard) for PHY and MAC protocol layer, a suite of IEEE 1609.x standards for upper protocol layers, and the SAE J2735, J2945-1 standards for vehicular application. Although there are several measurement studies in typical vehicular environments to characterize the 5.9 GHz DSRC channel, there is still a lack of practical measurements necessary for designing robust and reliable applications for dynamic vehicular environments.
For the purpose of providing practical measurements for developing vehicular applications, this paper first discussed the characteristics of vehicular communications and then reported ad hoc performance measurements with commercial off-the-shelf DSRC and Wi-Fi radios in real operating configurations. The experimental results indicate the effects of messages size, message frequency, weather condition, vehicle maneuver, and vehicle movement on communication performance in vehicular environments. As reported, (1) performance of two most popular transport layer protocols, UDP and broadcast, is significantly affected by the size and rate of transmitting data (e.g., the UDP goodput of 12.4 Mbps for DSRC was achieved with the data size of 1472 bytes), (2) signal attenuation (i.e., performance degradation) often occurs in rainy weather as vehicular radios operate at a high frequency under various weather conditions (e.g., the maximum communication range of DSRC was shortened from 750 to 450 ft), and (3) ad hoc performance within desired communication coverage is quite stable, whereas the performance shows a significant drop in throughput and substantial increase in data loss at longer ranges or varying distances (e.g., the difference between the maximum and minimum throughput of DSRC increased up to 8 Mbps).
Since having a better comprehensive understanding of these effects on performance and reliability enables improvements in development quality of vehicular applications, it is clear that continuous measurement studies in realistic application-specific scenarios are still required to provide the accurate foundation for robust, efficient, and practical vehicular applications.