
Abstract
Game theory has emerged as a brand new approach to model and analyse several problems of wireless sensor networks, such as routing, data collection, and topology control. Recently, a novel clustering mechanism called clustered routing for selfish sensors (CROSS) has been proposed based on game theory. The sensor nodes, which are modelled as players, join in a clustering game to campaign for cluster heads with an equilibrium probability. However, the CROSS algorithm needs the global information of how many nodes participate in the game at every round. Considering that this global way introduces much more packets exchange and energy consumption, we present a Localized game theoretical clustering algorithm (LGCA). In our protocol, each node selfishly plays a localized clustering game only with its neighbours within a communication radius
1. Introduction
Recent developments in microelectromechanical system (MEMS) have led a fabrication of many low-cost, low-power, and multifunctional sensor nodes. Various kinds of these sensors are networked through wireless communication and deployed regularly or randomly in large numbers to a specific district. This kind of sensor network can be used to keep the battle field under surveillance, monitor ambient temperature, and so on [1]. Due to limited battery power, one of the challenges of wireless sensor network is to prolong the network lifetime. Thus, efficient energy management becomes one of the key consideration points for researchers.
Several protocols and algorithms have been investigated from different perspectives [2]. Among them, the clustering method that organizes sensor nodes into groups in an ad hoc way is the most traditional and influential in terms of energy dissipation. The entire network is divided into a few clusters, each consisting of a cluster head and several cluster members. The cluster head collects each member's data and transmits fused data to the base station. Since the base station is always farther than the head, a cluster member can save much more energy on radio transmission. However, this is at the price of massive energy utilization of the cluster head because it consumes much more energy on receiving, fusing, and transmitting packets belonging to other members. Hence, it is better to regularly rotate the role of a cluster head to balance the energy load on every sensor node. Regarding clustering algorithms, the most important is how to effectively and fairly pick out the appropriate cluster heads while prolonging network lifetime as much as possible. This paper addresses how to choose cluster heads using a novel game theoretical approach.
Game theory is originally a mathematical method that describes the phenomenon of conflict and cooperation between intelligent rational decision makers. It is widely introduced and applied in wireless sensor networks in recent years [3]. The authors in [4] first utilize game theory to analyse the clustering problem and propose a clustering mechanism called CROSS. Each sensor node is modelled as a player, who can hear all other players’ messages and know how many players there are. According to this number of players, every player calculates an equilibrium probability, which decides whether a player declares to be a cluster head. Obviously, the global view in CROSS is not realistic and effective for two reasons: first, sensors usually have limited communication ability; second, a longer communication distance brings in much more interference. Hence, every sensor node, regarding to play a localized clustering game, can only hear messages from neighbours within its communication radius in our algorithm. Based on the number of players in a node's neighbourhood, it computes a probability and determines whether to compete for a cluster head. Compared with CROSS, our protocol is more practical and feasible. Simulation results also prove that our algorithm can effectively prolong the network lifetime.
The rest of the paper is organized as follows. Section 2 summarizes the related works on clustering problem. Section 3 gives an overview of CROSS, including a brief introduction and some interesting and important observations on CROSS. Section 4 describes our proposed algorithm in detail. In Section 5, simulation results between our algorithm and the other two algorithms are carefully compared and analysed. Finally, we conclude this paper in Section 6.
2. Related Works
Many clustering algorithms for wireless sensor networks have been proposed in recent years. Probably the most famous one is the low-energy adaptive clustering hierarchy (LEACH) algorithm [5]. The running time of LEACH is divided into numerous rounds. In every round, each node randomly produces a number between 0 and 1 and decides to be a cluster head (CH) if this number is less than a threshold. This threshold is elaborately designed so that a node can just be elected once in a certain time interval. Hence, all nodes nearly take turns to serve as CH, which achieves a uniform distribution of energy consumption among all sensors. Later, numerous algorithms are proposed to improve LEACH. Reference [6] designs LEACH-C in which the CH is no longer elected by node itself, but assigned by the base station which is capable of making the best decision via the global knowledge of network. The authors in [7] bring two improvements to LEACH. First, a novel energy-LEACH protocol gives more chances on nodes with more residual energy, thus preventing the whole network to die too quickly. Second, a multihop-LEACH protocol adopts the strategy of multihop communication among cluster heads instead of direct transmission between a CH and the base station (BS) because the latter wastes more energy on long-distance message delivering. However, these modified algorithms all depend on global information of the whole network such as node position (in LEACH-C) and residual energy (in energy-LAECH). Yet, in contrast, the expellant self-organization (ESO) algorithm is designed to replace the clustering formation procedure of LEACH [8]. ESO uses neighbour nodes’ residual energy and connectivity as a metric to determine candidates, who further bid for a formal CH. Nevertheless, the information collection of localized neighbours is operated at the beginning of every round, which brings in a large amount of overheads.
In [9], the authors take several node attributes into consideration, such as node degree, transmission power, mobility, and battery power. These parameters are weighed correspondingly and summarized to get a combined weight. The node with the smallest weight is chosen to be a CH. This weighted clustering algorithm (WCA) is completely distributed and dynamic, so that it quite adapts to the ever-changing topology. Similarly, [10] uses the weight of a node's k-density and residual energy as a metric to elect a CH, which is in the range of its 2-hop neighbourhood. Simulation results in this efficient cluster-based self-organization algorithm (ECSA) indicate a more evenly distribution of energy compared with LEACH and LEACH-C. Another algorithm, namely, DEC [11], also uses residual energy to elect CHs in a deterministic way, but outperforming than the probabilistic-based protocol LEACH.
Hybrid, energy-efficient distributed clustering approach (HEED) [12] is another well-known algorithm, in which CHs are selected by means of node residual energy and node degree. Moreover, at the beginning of clustering procedure, every node takes a number of iterations to decide whether to be a final CH by exchanging neighbouring messages in each repetitive step. This iterative scheme can effectively guarantee that the nodes with the least cost are chosen as final CHs.
In [13], an unequal cluster-based routing protocol (UCR) is put forward. Based on the observation that a CH close to BS consumes more energy on intracluster data forwarding, the authors group the nodes in proximity to BS into clusters of a rather small size, so that the corresponding CHs spend less energy on intercluster communication. In this way, no matter far or close, the power usage of an arbitrary CH is balanced. Consequently, the network lifetime is improved.
Besides, there are some other algorithms which concentrate on the clustering problem of heterogeneous wireless sensor networks. For example, (stable election protocol) SEP [14] uses a similar method of LEACH to elect CHs, with the effort of adding a few parameters to model different node types and initial energy. However, SEP solely takes two types of nodes into consideration while (energy-efficient cluster head election) EECHE [15] solves the clustering problem with three types of nodes.
In recent years, game theory is emerging as a powerful tool in the area of network formation. The authors in [16] first model the creation of internet-like networks as a game participated by selfish node agents. Without central control or coordination, these selfish nodes pay for their establishing links and benefit from short paths to destinations. This paper has shown some very interesting and heuristic results on distributed network designing. Afterwards, many people use the game theory to research the network formation problem [17–20]. Then in [21], the authors use game theory to construct a backbone in a wireless environment. By using the model of “Volunteer's Timing Dilemma”, every node selfishly takes the strategy of “when to volunteer”. In order to obtain a maximum expected utility, each node has a dominant strategy to volunteer. Implementations on several laptops, connected by 802.11g wireless cards, show that a wireless backbone can quickly be formed. However, previous works have assumed that every selfish node in a network creation game can communicate with all others, while in [22], the authors restrict every peer to a certain number of neighbours, thus providing a selfish neighbour selection (SNS) game. Nevertheless, different from those of Internet-like wired or wireless networks, in wireless sensor networks, clustering mechanism is an effective method to construct a network topology. Therefore, CROSS [4] introduces a game theoretical approach on clustering. A detailed description is shown in the next section. In addition, literature [23] proposes a repeated game theoretical approach for clustering in mobile ad hoc networks. Each node is assumed to have a weight value composed of residual energy, average moving speed, and connectivity with neighbours. The node with the lowest weight value is chosen to be the CH. In order to prevent a node from playing the “dishonest” strategy and reporting a deceitful weight value, the authors introduce a repeated game model with limited punishment mechanism. By doing this, all nodes will act honestly and further guarantee the correctness and fairness of CH election. Besides, [24] investigates hedonic clustering game from two aspects of fixed clustering and correlation clustering. The most important contribution of this paper is the comprehensive theoretical analysis of clustering game using a mathematical method.
This paper also deals with the clustering problem by means of a game theoretical approach. What is more, most of our work is based on CROSS, and most of our simulation results are compared with it. So next, an overview of CROSS is necessarily presented.
3. Overview of CROSS
3.1. A Brief Introduction to CROSS
This subsection reviews the mechanism of CROSS [4]. In CROSS, the cluster head selection problem is modelled as a clustering game defined by
The payoffs for two players clustering game.

Considering N players participate in the clustering game, according to Table 1, the utility function of player i can be described as:

Let us denote the probability of a player to choose strategy D as p and the probability to choose
Denoting

The expected average payoff of the equilibrium strategy for an arbitrary node i is given by
However, this average payoff is not the optimum value. The optimal case corresponds to the situation that only one player plays D and all the others play

By using the above game theoretical analysis, the authors in [4] propose the new clustering mechanism CROSS. They define a repeated clustering game in terms of rounds as the same in LEACH [5]. In the first round, N sensor nodes representing N players participate in the clustering game, and each of them has a probability calculated by formula (3) to compete for a CH. As a result, some of the nodes successfully declare themselves as CHs and form their corresponding clusters. In order to evenly distribute the energy consumption among all nodes, the players having served as CHs in the initial round better not join the game in the second round. Thus, the probability of these nodes is set to zero (zero probability rule). Now the number of players in the second round is
3.2. Our Observation on CROSS
CROSS has shown a good paradigm of using game theory in clustering problem. However, it lacks deliberate considerations in many aspects. First, CROSS assumes that every sensor can hear the transmissions from all others so that it is aware of the nodes who are serving as CHs and further confirms the number of players in the next round. This global way is obviously not realistic, for every sensor node has a certain transmission distance due to limited power level. Moreover, a larger communication range wastes much more energy on radio transmission and brings in more interference. Hence, we will regard the clustering game in a localized way by introducing a parameter
The second problem comes from the equilibrium probability p. Seeing from formula (3), p is an exponential decaying function of N. However, CROSS supposes all nodes are simultaneously playing the game, which makes N too large. As a result, a sensor node has an extremely small probability p to become a CH. In fact, it is most likely that no one declares to be CH. This is an important case that CROSS does not take into consideration.
The probability that all N nodes choose not to be CHs is

Figure 1 gives a graphic illustration of function (6). As the number of players N increases, the probability

Probability

Round statistics on the number of CHs for different w. The total experimental round is 1000.
The third problem exists in the observation that the equilibrium average payoff (4) is less than the optimal average payoff (5). Despite the difficulty that it is probably not able to achieve the optimal payoff by calculating an optimal probability
Without doubt, CROSS has successfully applied game theory to the clustering problem of wireless sensor networks. By calculating an equilibrium probability, each node has a certain chance to serve as a CH. Once the CHs are picked out, the other nodes will join in the CH with the closest proximity. By reselecting CHs in every round, CROSS has explored a more uniform energy distribution among all nodes and thus obviously extended the network lifespan compared to LEACH. Nevertheless, CROSS still leaves many unnoticed aspects to be carefully examined, which are the primary motivations for developing our protocol.
4. Our Proposed Protocol
Our proposed algorithm consists of an initialization phase to collect localized information and many repeated rounds, which is the same concept as in LEACH and CROSS. Each round is further divided into a set-up phase and a steady-state phase. The former is composed of three steps: potential CHs electing, real CHs contention, and cluster formation while the latter is responsible for data transmission among cluster member, CHs, and the BS. Figure 3 explicitly presents how our algorithm operates as time goes on.

Time line showing the procedures of our proposed protocol.
Besides, in our model, every node has three states: normal state, potential CH state, and real CH state. Figure 4 is the diagram of node state transition. Initially, all nodes are in the normal state. A node who wins the clustering game temporarily switches to the potential CH state while a node finally serves as a real CH stays in the real CH state.

Node state transition diagram.
4.1. Initialization Phase
We suppose that the maximum power level is large enough for every node to transfer packets to the BS. In addition, it is presumed that every node can adjust its power level to adapt to a certain communication distance. However, for the sake of energy conservation, it is not necessary to hold every node at such a high power level like CROSS. For example, a node in the head state has to hold its power level at the highest level while in the normal state it can only keep its power level at a particular level

Sensor nodes only communicate with neighbours within radius
The initialization phase is used to collect localized neighbour's information for every node. When sensor nodes are deployed to a specific area, each of them is then broadcasting a “Hello” message to its neighbours. Meanwhile, it also knows how many neighbours are around by receiving “Hello” messages. We denote this value as
4.2. Set-Up Phase
4.2.1. Potential CHs Electing
This is the first procedure that a new round starts. As we have addressed, our algorithm runs in a localized way. Hence, the clustering game is also played locally. Since node i only knows that

In the first round, each node egotistically determines whether to be a CH according to (7). If a node decides to be a CH, it temporarily stays in the potential CH state. A potential CH has to further compete for a real CH. In addition, those failed potential CHs must give up the opportunity to bid for real CHs and return to the normal state. If a node successfully competes to be an actual CH, a localized zero probability rule (ZPR) [4] is applied. Its probability p is kept zero until all its neighbours have been real CHs. For a node that has not yet served as a real CH, it maintains a table that marks the already served neighbours. Suppose that the number of served neighbours for node i is

4.2.2. Real CHs Contention
As what we can see from the last paragraph, every node selfishly decides to be a CH, so it is most probable that more than two nodes in close proximity happen to be CHs. Actually this situation is quite common in CROSS, but we are unwilling to see it: for one reason, the CHs are likely to be unevenly distributed; for another, it is not the optimum payoff that we seek for. As what we have described in Section 3, the optimal case is that just one node declares as CH, and all the others choose to be cluster members. Thus, in order to achieve the optimum payoff in our algorithm, all potential CHs have to further contend for real CHs to ensure that only one real CH in a certain region.
In our scheme, the contention procedure is naturally carried out by utilizing CSMA/CA mechanism without any extra communication overhead. A potential CH who first fortunately contends for the physical media will immediately announce itself to be a real CH. Once hearing the announcement, the other potential CHs will abandon the declaration to be real CHs. Moreover, they all return to the normal state. As a result, there is only one real CH in a neighbourhood though several potential CHs have emerged. In addition, the real CHs are rather uniformly scattered in the whole district because every real CH is at least

Real CHs election. A five-pointed star represents a real CH, and a filled circle represents a normal node. (a) Real CHs are regularly distributed. (b) The “left-behind node” problem. (c) and (d) Two solutions of the “left-behind node” problem.
As we know, LEACH, SEP, and CROSS are all presuming that there are no restrictions on the communication distance of sensor nodes. This means that every node can reach another no matter how far it is away. However, as we restrict the communication radius of every normal node to be
4.2.3. Cluster Formation
When all real CHs have been determined, these heads will broadcast messages to announce their election. The remaining normal nodes pick out the nearest CH to join, and the clusters are then formed. Subsequently, every node waits for its corresponding CH to allocate a time slot. Once the slot is assigned, every normal node is needless to contend for media access.
4.3. Steady-State Phase
This phase is almost the same as described in [5, 6]. Every normal node collects its sensing data and transmits it to the CH in the designated time slot. After all intracluster packets have been received, the CH performs a data aggregation and sends a compressed packet to the BS. In such a way, sensor data streams from nodes to CHs and eventually to the BS again and again. After a predefined time, the current round comes to an end and the next round starts, accompanied by new CHs election and clusters formation.
As a summary, we name our protocol as (localized game theoretical clustering algorithm) LGCA. The most critical characteristic of LGCA is that sensor nodes are assumed to play a localized clustering game with their neighbours. According to the number of participating neighbours, every node gets an equilibrium probability to become a CH and form a cluster. Although some nodes may be left and fail to join any cluster, two solutions are proposed. First, these left-behind nodes are given another chance to bid for real CHs and form new clusters. We call this algorithm LGCA1. Second, the left-behind nodes increase their power level and join proper existing clusters. We call this algorithm LGCA2. Due to the solutions of “left-behind nodes”, the convergence of both LGCA1 and LGCA2 can always be guaranteed to make sure that a node either to be a real CH or to join a cluster. Finally, the flowchart of our LGCA family of algorithms is presented in Figure 7. Every node is treated equally and carries out the same algorithm. Despite the simplicity of this protocol, it is indeed effective according to our simulation results described in the next section.
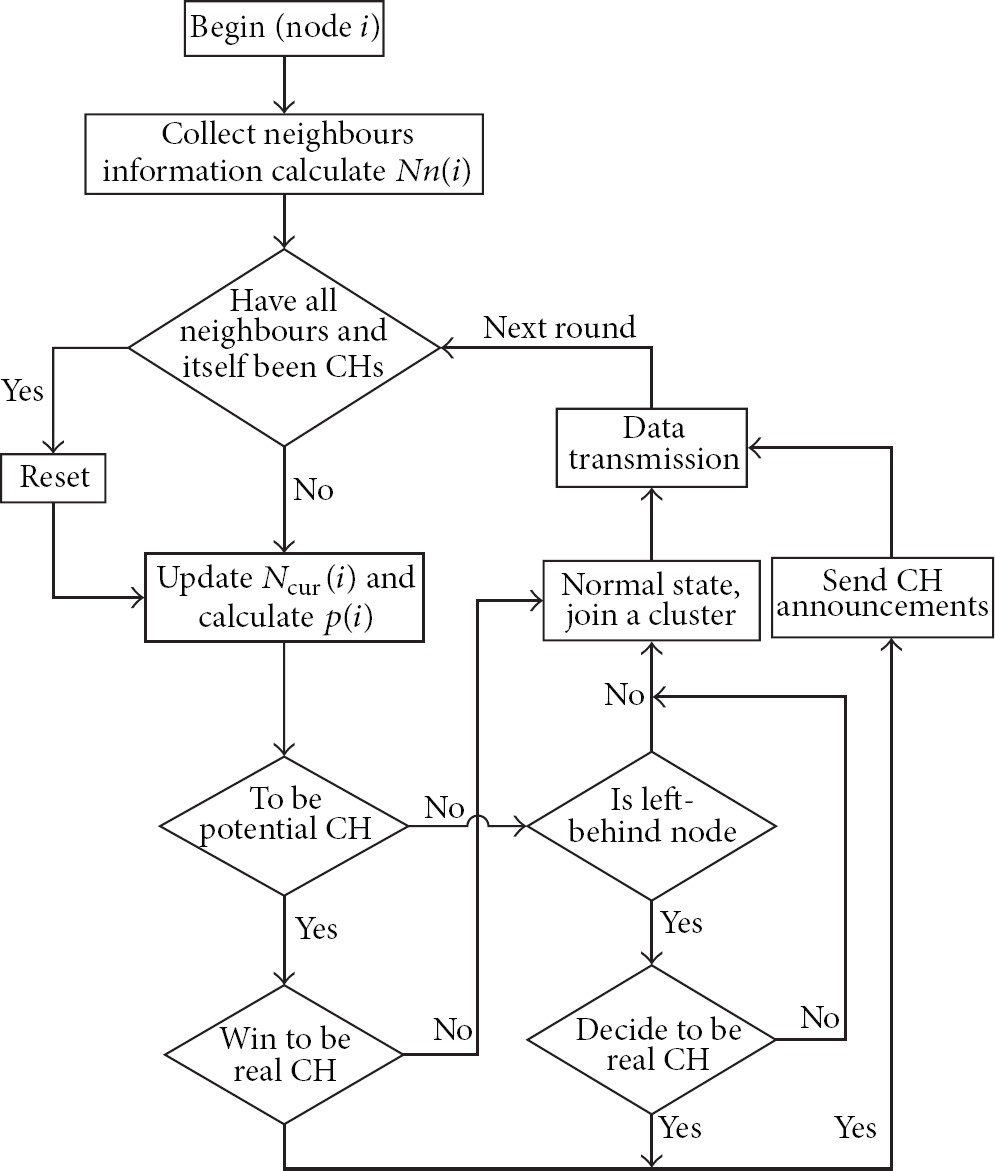
Flowchart of LGCA protocol.
5. Performance Evaluation
Our proposed algorithm is validated by a number of MATLAB simulations compared with CROSS and LEACH. Table 2 is a list of simulation parameters.
Simulation parameters.
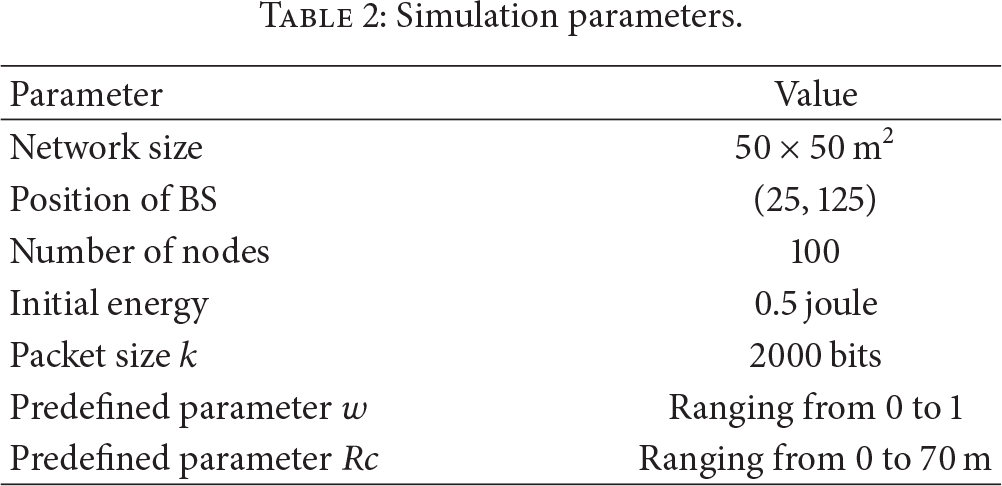
The parameters we used are almost the same as in CROSS except a new parameter
The radio energy dissipation model is assumed to be the same as in [6]. In transmitting state, the energy is supposed to be spent on radio electronics and power amplifier. Moreover, a threshold distance



The radio energy dissipation parameters are set as follows:
In order to eliminate accidental errors, every simulation for a specific parameter has been carried out 100 independent times, thus obtaining a reliable average result.
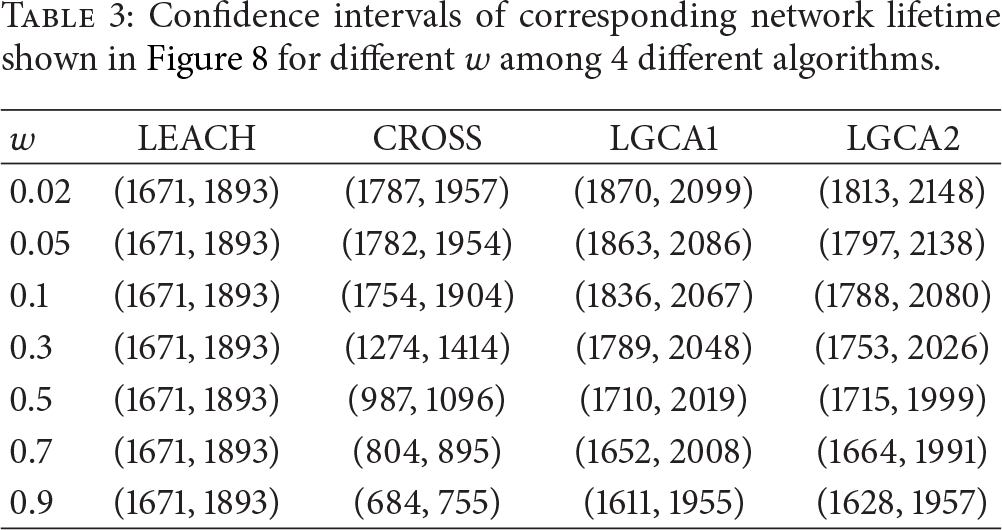
Network lifetime is a common evaluation criterion for clustering problem. Usually the network lifetime is defined as the lifespan of the node who first runs out of energy. Figure 8 is a network lifetime comparison among LEACH, CROSS, and LGCA families for seven different values of w, which are mentioned before. By the way, here
Confidence intervals of corresponding network lifetime shown in Figure 8 for different w among 4 different algorithms.
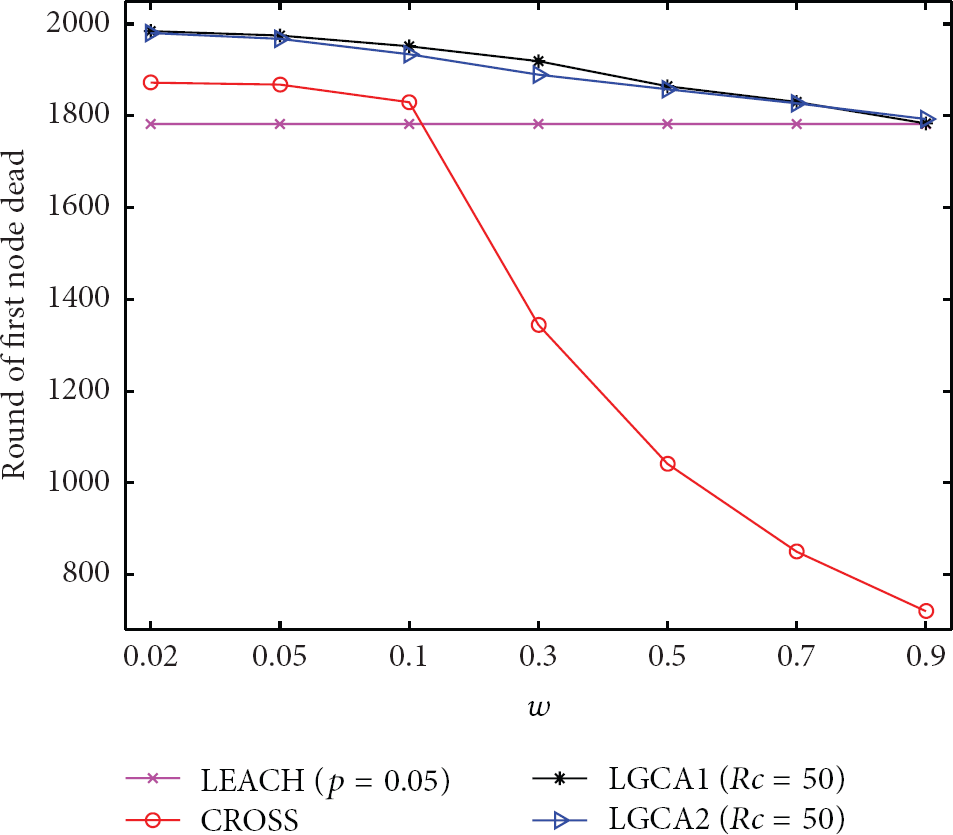
Network lifetime comparison among LEACH, CROSS, and LGCA families for different w.
Figure 9 is a comparison of maximum node lifetime among LEACH, CROSS, LGCA1, and LGCA2 for different values of w. Figure 10 gives the corresponding number of nodes alive at every round. As we can see, LEACH achieves the best maximum node lifetime. In contrast with the round of first node dead in Figure 8, the energy consumption rate of LEACH is rather uneven. Figure 10 also verifies this. Obviously, LGCA family has the most uniform rate of energy expenditure. In addition, our LGCA protocol is more energy saving due to the fact that the maximum node lifespan of both LGCA1 and LGCA2 is longer than that of CROSS except LGCA2 when

Maximum node lifetime of LEACH, CROSS, and LGCA families for different values of w.

Number of alive nodes for LEACH, CROSS, and LGCA families.

Average number of CHs among LEACH, CROSS, and LGCA families.
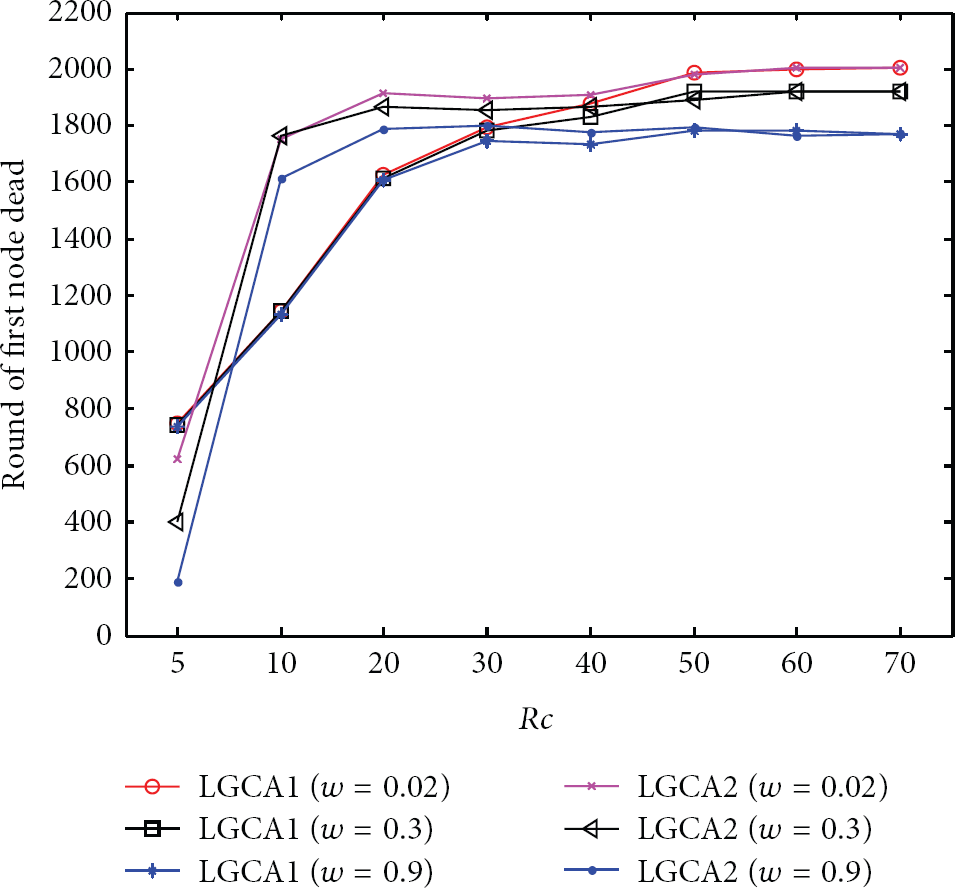
Figure 11 illustrates the differences of average number of CHs among LEACH, CROSS, and LGCA families. In accordance with previous analysis in Section 3, the cluster number, of CROSS sharply decreases as w grows. However, LEACH keeps a constant cluster number and LGCA family achieves a relatively consistent value with slight variations. This indicates that w has little influence on the cluster number of LGCA family. In addition, node coverage is extended following the increase of
Network lifetime of LGCA1 and LGCA2 for three different values of w.

Maximum node lifetime for LGCA1 and LGCA2 for three different values of w.
The simulation results shown perviously demonstrate how effectively our designed protocol LGCA performs compared with CROSS and LEACH. Moreover, the dependency relationship to parameters
6. Conclusion
On the basis of CROSS, we present a localized game theoretical approach to the clustering problem of wireless sensor networks. Every node and its neighbours are simulated to play a clustering game with the purpose of selecting a cluster head. Though all nodes selfishly decide whether to be a potential CH, a real CH is restricted in a specific district by MAC contention. What is more, two solutions are suggested to handle the “left-behind node” problem. Simulation results reveal that LGCA outperforms CROSS and LEACH by properly selecting parameters. In the future, more node parameters such as residual energy and distance to the BS will be taken into consideration to ensure that the worthiest node wins the cluster game. In addition, the clustering problem of heterogeneous sensor networks is also concerned in our future plan.