
Abstract
Rotating machinery is widely used in modern industry. It is one of the most critical components in a variety of machinery and equipment. Along with the continuous development of science and technology, the structures of rotating machinery become of larger scale, of higher speed, and more complicated, which results in higher probability of concurrent failure in practice. It is important to enable reliable, safe, and efficient operation of large-scale and critical rotating machinery, which requires us to achieve accurate diagnosis of concurrent fault, for example, rolling bearing diagnosis, gearbox diagnosis, and compressor diagnosis. In this paper, to achieve concurrent fault diagnosis for rotating machinery, which cannot be accurately diagnosed by existing methods, we develop an integrated method using artificial immune algorithm and evidential theory.
1. Introduction
For a complex engineering system [1], many fault diagnosis problems involve quantitative data and qualitative information, as well as various types of uncertainties, for example, incompleteness and fuzziness [2]. Conventional analytical models based on pure data, for example, time series analysis models and filter based models, are not always applicable, since it is difficult to obtain a complete set of historical data for developing a perfect mathematical model to simulate a system [3, 4]. Furthermore, due to the fact that human beings hold ultimate responsibility in most situations, the subjective judgment plays an irreplaceable role in making final decision, which may not be always accurate. Thus, it is highly desirable to develop a fault diagnosis that can model and analyze diagnosis problems using uncertain information, which is likely to be incomplete and vague.
The development of methods for handling uncertain information has received considerable attention in the last three decades. Several numerical and symbolic methods have been proposed. Three of the most common frameworks for representing and reasoning with uncertain knowledge are (i) Bayesian probability theory; (ii) Demister-Shafer (D-S) theory of evidence; (iii) Fuzzy set theory. Due to the power of the D-S theory in handling uncertainties, so far, it has found many application areas, for example, expert system, uncertainty reasoning.
To avoid the drawbacks of using evidential theory alone to fault diagnosis, for example, its heavy calculation burden due to the exponential “explosion” of the focal elements involved by fault information and data combination [5], in this paper, we present an integrated approach for the concurrent fault diagnosis using artificial immune algorithm [6] and evidential theory [7], aiming to not only improve the diagnosis rate but also increase the reliability of diagnostic conclusion.
This research work has the following theoretical and practical contributions.
Our method can represent the uncertainty existing in the result of fault diagnosis due to the evidence theory involved. To demonstrate our method, we apply our method to the real test bed of concurrent fault diagnosis for rotating machinery. The results show that our developed method can make accurate judgment for concurrent fault of the rotating machinery which has certain credibility. Regular maintenance of equipment can be scheduled effectively.
The remaining part of this paper is organized as follows. In Section 2, the related work is surveyed and presented. In Section 3, we will describe the experimental conditions and the detailed parameters of the used vibration sensors. Section 4 describes the artificial immune algorithm and dimensionless parameters for fault diagnosis. Our proposed integrated concurrent fault diagnosis method base on the artificial immune algorithm and evidence theory will be given in Section 5. The systematical evaluation in a real test bed for this proposed method is given in Section 6, and Section 7 concludes this paper.
2. Related Work
Previous researchers have conducted considerable effort on rotating machinery diagnostics and developed a variety of diagnosis methods. In [11], a fault diagnosis system based on the wavelet transform and artificial immune system is presented, in which the wavelet transform is used to analyze nonstable signals and obtain their eigenvectors, and the artificial immune algorithm is also proposed to conduct self-nonself analysis based on these eigenvectors. The system is successfully applied to vehicle fault diagnosis with good results. In [12], a new hybrid approach based on conventional fuzzy soft clustering and artificial immune systems for sensor multiple faults is proposed, which can require no prior knowledge, or the system behavior, and no learning processes are required. This new approach uses the fuzzy clustering c-means algorithm firstly to generate a single fuser for the input sensor signals. Then a fault detector was generated based on the artificial immune systems. In [13], support vector machine (SVM) is a classification method, but some parameters in SVM are selected by man's experience. Aydin et al. used a multiobjective artificial immune algorithm (AIA) to optimize the parameters of SVM. The fault diagnosis of induction motors and anomaly detection problems shows that the SVM optimised by AIA can give higher recognition accuracy than the normal SVM. In [14], Wang et al. proposed the improved immune algorithm based on Discrete Particle Swarm Optimization (DPSO) technique to solve the problem that exists in fault diagnosis. This approach can improve the mutation mechanism and enhance the immune algorithms performance. Simulation results show that the new scheduling algorithm can deal with the uncertainty situation and be suitable for multifaults diagnosis. In [15], a composite fault diagnosis approach was proposed, combining the real-valued negative selection (RNS) algorithm with the support vector machine. In the new method, the difficult problem of lacking training samples was solved by using the new method in the conventional classification algorithm. In [16], Wanjun et al. proposed a fuzzy-immunity mixed fault diagnosis method. This method can resolve quantitatively diagnosis for gun-launched missile fault in the lack of prior knowledge. In [17], the authors propose two model-based fault detection and isolation schemes for robot manipulators using soft computing techniques, as an integrator of Neural Network and Fuzzy Logic. The first scheme isolates faults by passing residual signals through a neural network. The second scheme isolates faults by modelling faulty robot models for defined faults and combining these models as a generalized observers scheme structure. In [18], the authors present an integrated fault diagnostics model based on the Genetic Algorithm and Artificial Neural Network for identifying shifts in component performance and sensor faults. The diagnostics model uses response surfaces for computing objective functions to increase the exploration potential of the search space while easing the computational burden firstly. Then a nested neural network is used with genetic algorithm. The nested neural network functions as a filter to reduce the number of fault classes to be explored by the genetic algorithm. In [19], the authors present an integrated neural fuzzy approach for transformer fault diagnosis, which formulates the modeling problem of higher dimensions into lower dimensions. Then, the fuzzy rule base is designed by applying the subtractive clustering method which is very good at handling the noisy input data. The simulation result shows that the method possesses superior performance in identifying the transformer fault type. In [20], the authors make use of advantages of the neural network and the fault tree to construct the fault diagnosis system. The fault tree with an intuitive, logical, and strong features for a simple structure determines the source of the problem, but for accessing to complex and uncertain domain knowledge, and neural networks technology has to learn the characteristics of self-association and can just make up the shortcomings of the model fault tree diagnosis. The authors take control box faults of a certain digital control system as an example to simulate. The training results show that the method can be more accurate and quick to make fault diagnosis. In [21], the author proposed a new method based on support vector machine with genetic algorithm to fault diagnosis of a power transformer. In this method, the genetic algorithm is used to select appropriate free parameters of support vector machine. The simulation result indicates that the proposed method can achieve higher diagnostic accuracy. In [22], the authors proposed a fault diagnosis method based on kernel principal component analysis (KPCA) and support vector machines (SVM). Firstly initial feature vectors of motor vibration signal were mapped into higher-dimensional space with kernel function. Then the PCA method was used to analyze the data in the high-dimensional space to extract the nonlinear features which is used as training sample of SVM fault classifier. Lastly, the rotor fault is identified using the trained classifier. Research results showed that the method can identify motor rotor fault efficiently and fulfill fault classification accurately. In [23], the researcher demonstrated the ability of genetic programming to discover automatically the different bearing conditions. The genetic programming (GP) can generate new features from the original dataset without prior knowledge of the probabilistic distribution. The created features are then used as the inputs to a neural classifier for the identification of six bearing conditions. In [24], the authors presented a fault diagnostic method based on a real-encoded hybrid genetic algorithm evolving a wavelet neural network (WNN). The main drawbacks of a back propagation algorithm of wavelet neural network (WNN) are that the optimal procedure is easily stacked into the local minima and cases that strictly demand initial value. A real-encoded hybrid genetic algorithm evolving a WNN can be used to optimize the structure and the parameters of WNN instead of humans in the same training process. A number of examples were further given to show that the method proposed has good classifying capability for single- and multiple-fault samples of power transformers as well as high fault diagnostic accuracy. In [25], a fault diagnosis method is proposed based on adaptive neurofuzzy inference system (ANFIS) in combination with classification and regression tree (CART), which is used as a feature selection procedure to select pertinent features from data set. The crisp rules obtained from the decision tree are then converted to fuzzy if-then rules. The hybrid of back-propagation and least squares algorithm are utilized to tune the parameters of the membership functions. Research results show that the CART-ANFIS model has potential for fault diagnosis of induction motors. In [26], the authors presented a study on the application of particle swarm optimization (PSO) combined with artificial neural networks (ANNs) and support vector machines (SVMs) for bearing fault detection in machines. The classifier parameters, for example, the number of nodes in the hidden layer for ANNs and the kernel parameters for SVMs, are selected along with input features using PSO algorithms. In [27], Dong et al. applied neural network and Dempster-Shafer theory (D-S) to rotor in turbine generator set to diagnose multiple faults. The D-S reasoning theory is used to do fusion decision making based on the diagnosis result.
From the above survey over the related works, we can observe that there is a continuing tread to develop a fusion method (which can fully utilize the advantages of multiple methods) for the concurrent fault diagnosis, due in part to the complexity of concurrent failures and uncertainty in its diagnosed results. This naturally leads to our primary objective of this paper, that is, to achieve concurrent fault diagnosis for rotating machinery, which cannot be accurately diagnosed by the current methods.
3. Experimental Conditions and Basis
3.1. The Studied Rotating Machinery
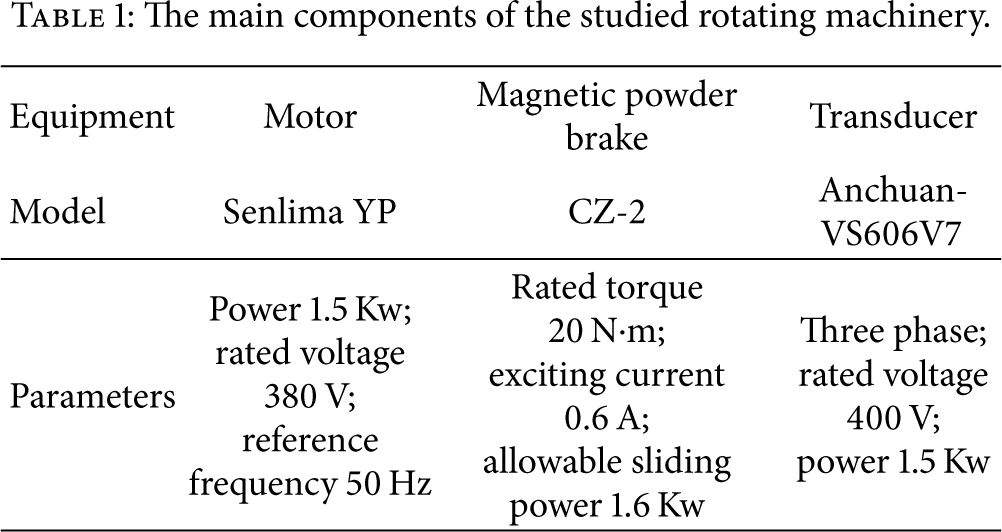
In this research work, a motor-gearbox-magnetic powder brake test device has been developed by our research lab (Guangdong province Petrochemical Equipment Fault Diagnosis Key Laboratory, Guangdong University of Petrochemical Technology, China), as shown in Figure 1, which consists of three major parts as (1) motor, (2) magnetic powder brake, and (3) transducer. Two sensors are used to gather sensory data from the rotating machinery. The detailed parameters for each unit are given in Table 1.
The main components of the studied rotating machinery.

The developed real test bed.
3.2. The Used Sensory Data Collection System
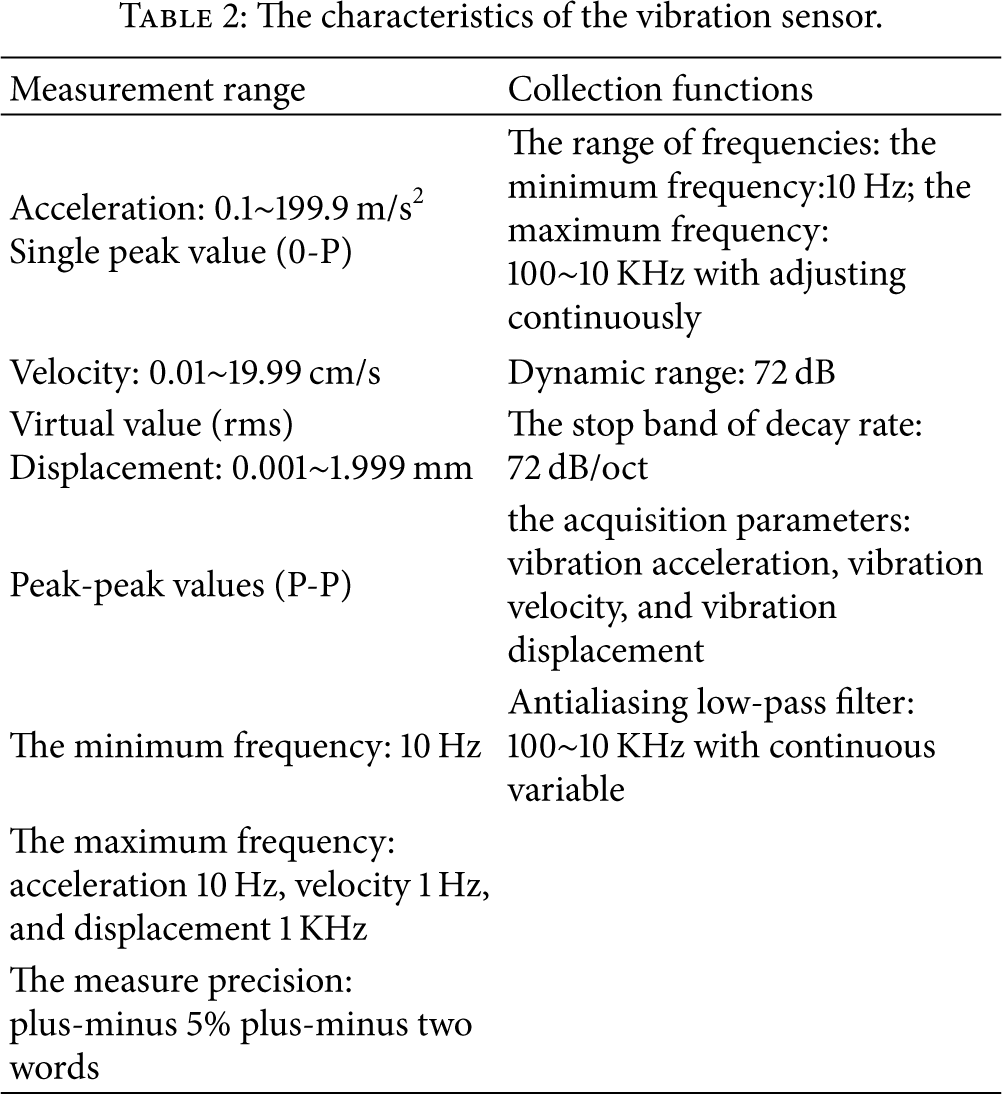
In Figure 2, we can see the used vibration sensor and machinery health collector in this research work. The sensor can gather three types of information: (1) vibration acceleration, (2) vibration velocity, and (3) vibration displacement. The detailed feature description about the used sensor is given in Table 2.
The characteristics of the vibration sensor.

In this machinery health collector, two vibration sensors are associated. The gathered sensory data will be stored in the data collector first and then exported to computer.
3.3. Used Variable in This Paper
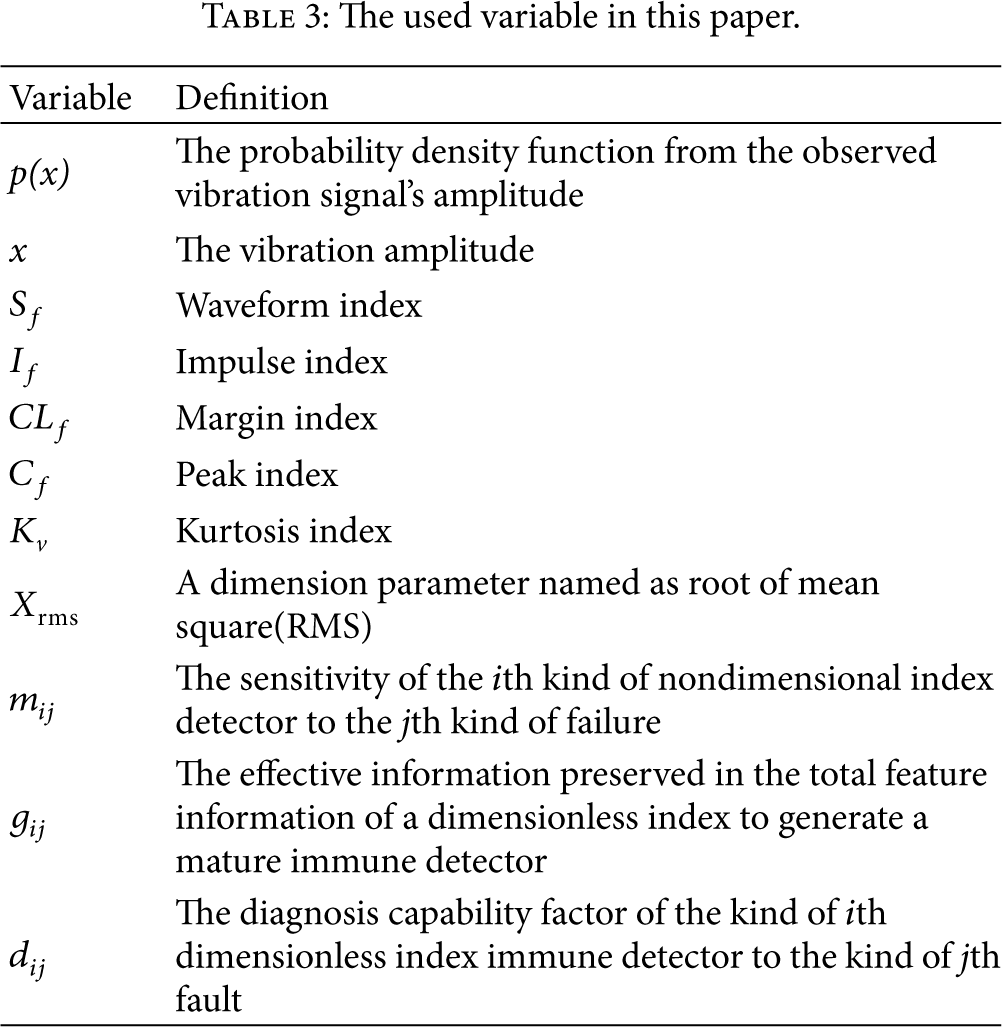
The used variable in this paper is listed in Table 3.
The used variable in this paper.
4. Artificial Immune Algorithm and Dimensionless Parameters
Based on biological immune system through antigen recognition, immune response, and clone selection process to judge their “own” or “nonself” substances (Figure 3 shows the concept of self and nonself space), to maintain and protect a stable internal environment, Forrest and Hofmeyr proposed a negative selection algorithm in [28] to detect patterns.

The figure illustrates the concept of self, nonself, and detector in a feature space.
4.1. Negative Selection Algorithm
The basic idea of the negative selection algorithm is to produce a set of change detectors, which can detect changes in what is considered normal behavior of a system. The algorithm consists of two stages: Generating Detector Set stage and Training Detector Set stage. The Generating Detector Set stage caters for the generation of change detectors. Briefly, the procedure proposed the following: (1) define self data; (2) generate a candidate detector randomly; and (3) match each candidate detector with self data; if it matches; delete it, if not, add it to detector set. Subsequently, system is monitored for changes using the detectors generated in Generating Detector Set stage; if any detector ever matches the input data, then an abnormal is known to have occurred. Otherwise, the system is normal, as shown in Figure 4.
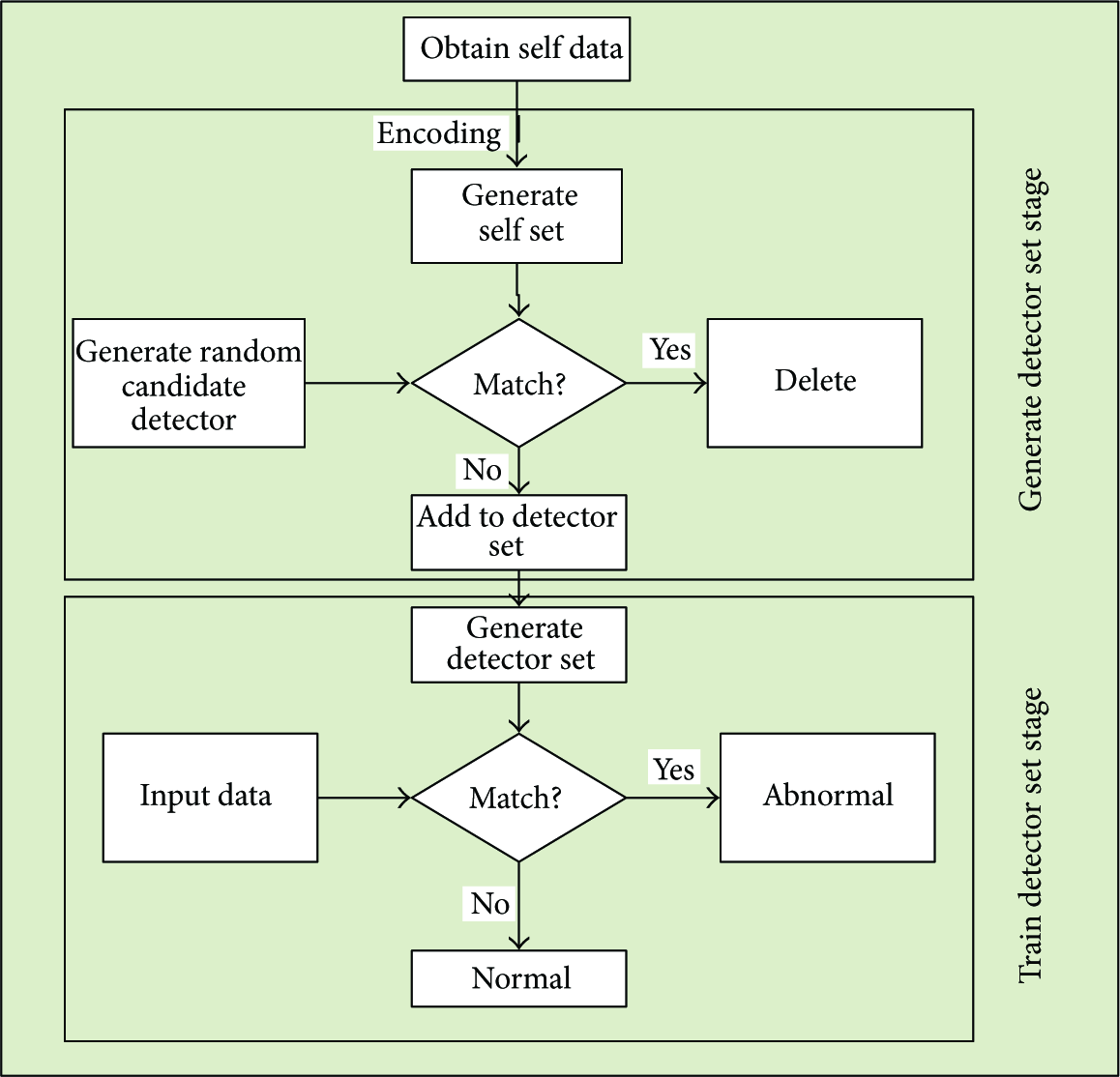
Negative selection algorithm.
In this paper, we first introduce this algorithm to detect the type of a fault in rotating machinery by constructing an immune detector based on the vibration signal analysis.
4.2. Dimensionless Parameters
Based on the probability density function
Dimensionless parameters are the ratio of two-dimension parameters, defined as follows:

In the practice, the following dimensionless parameters are frequently used and it is found that they behave well for rotating machinery fault diagnosis, specifically,
if if if if kurtosis index
Based on
In order to facilitate us to introduce the integration diagnosis method, some definitions used in this paper are as follows.
Definition 1.
we define
Definition 2.
we define
Definition 3.
we defined 
5. The Integration of Artificial Immune and Evidential Theory
The method developed by Zhang [30] improved the negative selection algorithm and made use of the above five nondimensional parameters to generate the five immunity detectors. These detectors were further used to diagnose the fault of rotating machinery. We can obtain the range of each dimensionless parameter in different fault mode. It is found in the experimental results that the ranges of some nondimensional parameters for different values of fault modes will duplicate or even cross with each other. Making the target dimensionless parameter immune detector with each fault mode is unique and does not cross with those of other dimensionless characteristics. In practice, it is usual to reduce these value ranges to achieve an accurate fault diagnosis. The detector with such desired properties is named mature immune detector.
5.1. The Evidence Theory for Fault Diagnosis
The evidence theory developed by Dempster [31] was extended and refined by Shafer [32]. The evidence theory is related to Bayesian probability theory in the sense that they both can update subjective beliefs given new evidence. The major difference between the two theories is that the evidence theory is capable of combining evidence and dealing with ignorance in the evidence combination process. Specifically, it can distinguish the events such as “do not know,” “uncertainty,” and other important concepts on cognition. The basic concepts and definitions of the evidence theory relevant to this paper are briefly described as follows.
Let 
Associated with each BPA are a belief measure (Bel) and a plausibility measure (Pl) which are both functions: 

Since
The kernel of the evidence theory is the Dempster's rule of combination by which the evidence from different sources is combined. The rule assumes that the information sources are independent and use the orthogonal sum to combine multiple belief structures 
The evidence theory is applied to the fault diagnosis through the synthesis of information to get some basic probability assignment functions. After obtaining these basic probability assignment functions, the D-S combination rule can be used to aggregate them to get a final judgment with certain belief degrees in the focal elements. This final judgment can characterize the uncertainty in fault diagnosis and thus is useful to avoid the false alarm in final decision.
5.2. An Integrated Concurrent Fault Diagnosis Method Using Artificial Immune Algorithm and Evidence Theory
In the following section, we will present an integrated method using artificial immune algorithm and evidential theory for fault diagnosis.
Considering the existing dimensionless parameters is insensitive to the change of working condition, so it is applicable to fault diagnosis technology, yet it is not very satisfactory for concurrent fault diagnosis in rotating machinery, and the number of the conventional dimensionless parameters is few. In order to overcome the disadvantages of conventional dimensionless parameters in rotating machinery fault classification, building new dimensionless parameter, which especially possesses the features of integrated diagnosis, is of great significance to improve capability of diagnosing fault and analyzing fault characteristics. A new method based on genetic programming is proposed to construct the new dimensionless parameters [33]. According to this method, simple dimensionless parameters are combined and new dimensionless parameters are formed, then fitness function is adopted to measure the performance of new generated indexes. With this method, two new dimensionless parameters having better classification ability than that of existing ones are obtained for fault diagnosis of rotating machinery. These two new dimensionless parameters are as follows:
In our paper, we use these two parameters with five previous parameters to detect the fault. The specific integrated diagnostic process is summarized in Table 4.
The specific integrated diagnostic process.

The above integrated approach can be illustrated by Figure 5. We assign different weight coefficients to seven dimensionless indexes before aggregation using the evidence theory. This is based on the fact that each index has different diagnosis capability and sensitivity for different faults. Such technology via assigning weights for each index can improve the reliability of diagnosis results and avoid possible incorrect conclusion resulted by the evidence conflict. Many scholars have adopted this idea to improve the combination methods of evidence theory. The details can be found in these literatures and thus we do not touch them here to save the space.

Schematic of the developed diagnosis approach.
6. A Case Study (See Figure 6)

Waveform of the acceleration under grinding fault.
Using our testing equipment, the experimental data are measured as shown in Table 5.
The range of each nondimensional parameter.

From the range of the indexes which are listed in Table 5, we can calculate
The obtained basic probability assignment functions from seven indexes.

Based on the basic probability assignment functions summarized in Table 6, we then use evidential theory to fuse the data. The final aggregated results are shown in Table 7.
The final results of our integrated approach.

In Table 7,
7. Discussion
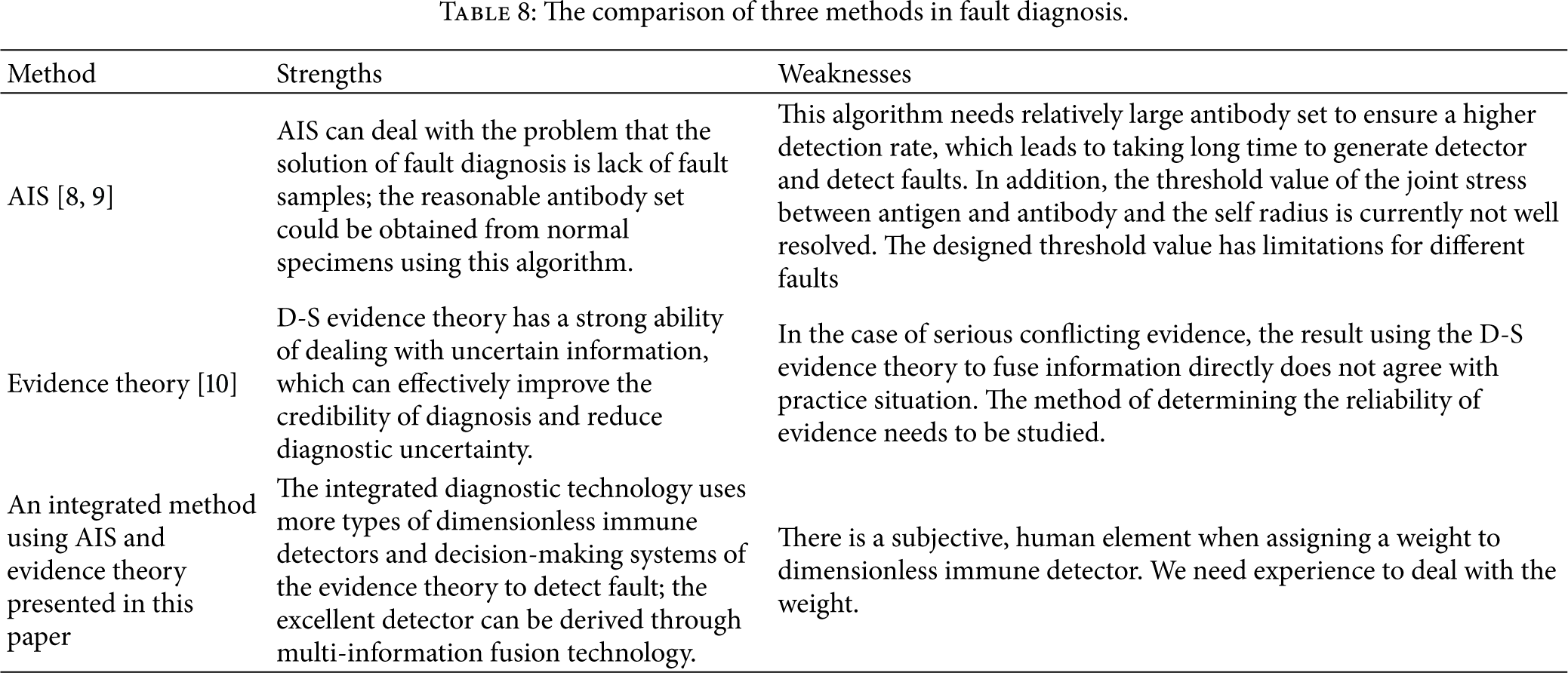
To achieve concurrent fault diagnosis for rotating machinery, which cannot be accurately diagnosed by the current methods, we develop an integrated method using artificial immune algorithm and evidential theory to solve this problem. Our developed method can take advantages of artificial immune algorithm and evidential theory and thus has ability to diagnose the fault in a quick and effective manner. In particular, our method can represent the uncertainty existing in the result of fault diagnosis due to the evidence theory involved. In order to demonstrate our method, we apply our method to the case of concurrent fault diagnosis for rotating machinery. The results show that our developed method can make accurate judgments for concurrent fault of the rotating machinery under consideration, and the diagnosis result has certain credibility. Finally, we carried on some comparison with other algorithms in Table 8.
The comparison of three methods in fault diagnosis.
Footnotes
Acknowledgments
This work was partially supported by the NSFC under Grant 61174113 and the Natural Science Fund of Guangdong Province under Grant S2011020002735.