
Abstract
Many researches on network control with a design principle of self-organization have been studied for large-scale networks. Since self-organized control is based on local interactions between system elements, it has high scalability, adaptability, and robustness; however, the management of the whole system is very difficult. In order to solve this problem, a controlled self-organization scheme has been proposed, which aims for desired system behavior by controlling a part of self-organized nodes. Although there are many practical proposals on the scheme, no design approach for it has ever been investigated. In this paper, we propose and evaluate a design approach for the network based on controlled self-organization, paying attention to the control timescale. Through computer simulations, we show the adaptability and stability of the proposed design approach.
1. Introduction
Future wireless sensor networks will have massive numbers of elements and should have highly scalable and adaptable properties. However, controlling such a large-scale network is very difficult challenges. For this purpose, self-organization has attracted an increasing attention due to its nature of scalability, adaptability, and robustness [1–3]. Each element in self-organization makes a decision on the basis of local interactions and local rules, which leads to the emergence of global behavior. However, this pure self-organization has some problems because of its bottom-up design [4], such as difficulty of managing the whole network and slow convergence speed after perturbations.
Practical realization of a self-organized network requires complicated emergent behavior to be manageable. However, decision-making based on local interactions in large systems results in emergent behavior, and precise management or control of such behavior is unrealistic. To solve these problems, [5] proposes controlled self-organization. The authors of that paper suggest the use of an observer/controller architecture, where an observer and a controller are responsible for correcting system-level behavior. In controlled self-organization, an external observer and controller are responsible for “external control,” guaranteeing that system behavior remains within constraints set by the system manager. The main task of the observer is to monitor system behavior by sampling information from a subset of system elements. The controller evaluates the system behavior reported by the observer and performs control actions that influence the system toward a given objective function. This observation/control loop is performed periodically to satisfy system goals. The observer/controller architecture is responsible for ensuring the desired behavior of the system, for guaranteeing high system performance, and for encouraging convergence of the system state, thus making the self-organized system manageable by controlling some of the self-organization components. Various applications of controlled self-organization are found in [6–8].
Although controlled self-organization is important for the realization of large-scale wireless sensor networks, the potential for unexpected situations due to simultaneous external and self-organized control remains poorly understood. Robustness to network topology change is also important for wireless sensor networks, where changes due to wireless channel conditions, node positions, and the number of nodes are commonplace. If communications protocols are not sufficiently flexible regarding environmental perturbations, various types of performance degradation may occur, such as data collection failures, data delivery delays, and increased energy consumption.
These perturbations and controls in each layer in the wireless sensor network architecture operate on widely different timescales. MAC layer protocols support one-hop communication, where data transmission takes a few milliseconds in most IEEE 802.15.4 sensor networks [9]. Energy-efficient MAC protocols with sleep scheduling for prolonging network lifetime are often assumed in wireless sensor networks, which raises the lower limit of one-hop communication timescales due to the sleep cycles of tens of milliseconds to seconds [10–12]. Routing layer protocols have to deal with topological changes to realize source-to-destination communications. In [13–15], static sensor nodes manage the network topology by using periodic Hello messages every several tens of seconds. The timescale of the external control in controlled self-organization should be longer than that of the routing layer because global behavior of a self-organized network arises as a result of that routing process. Thus, because these control timescales substantially differ, it is insufficient to discuss robustness within only one layer.
In this paper, we propose a design approach for a scalable and robust network based on controlled self-organization, paying attention to the control timescale. We show that a design for robustness in only one layer cannot improve various types of perturbations that cause topological changes. As a solution to these problems, we propose a controlled self-organization-based routing protocol. We apply the controlled self-organization scheme to a potential-based routing and thereby propose controlled potential-based routing (CPBR). Our study considers periodic environmental monitoring systems where sensor nodes deliver monitored data to multiple static sink nodes with CPBR. Then, we discuss how the timescale of control in the MAC, routing, and external control layers should be designed and investigate this through computer simulation.
The rest of this paper is organized as follows. In Section 2, we briefly present each layer's control, and in Section 3, we give descriptions of perturbation models. Then, in Section 4, we explain how to design them. We present the simulation results in Section 5. Finally, we conclude our paper in Section 6.
2. Overview of the Each Layer's Control
In this section, we give overviews of CPBR [17], and especially we discuss the control timescale in a MAC layer, routing layer, and external control.
2.1. Sleep Control in MAC Layer
One-hop communication is performed in the MAC layer, which takes several milliseconds in the most sensor network scenarios. Therefore, it is difficult to deal with perturbations that cause the topology changes with cycle of a few milliseconds or less. Moreover, in many MAC protocols in the sensor network, the sleep control is assumed, where power-saving operation is expected. For example, B-MAC [10], which is a widely known MAC protocol with the sleep control, allows nodes to sleep every tens of milliseconds to several seconds. Since each node can communicate with its neighbor nodes only when it is awake, the cycle of this sleep control means the minimum unit time of one-hop data transmissions. Hence, such frequent environmental perturbations (~1 ms) are dealt with retransmissions in the MAC layer. We use the intermittent receiver-driven data transmission protocol [16] as a MAC protocol. This protocol is one of the receiver-driven or receiver-initiated MAC protocols where nodes periodically sleep and transmit a beacon, containing an identifier (ID) of the nodes, to inform their neighbors that they are ready to receive data as shown in Figure 1. When a sender node receives a message containing an ID, it returns a send-request message (SREQ) so as to communicate with the sender of the ID.

IRDT protocol [16].
2.2. Route Management in Routing Layer
CPBR is a kind of potential-based routing protocols, and it utilizes the proactive route management. In a potential-based routing, all nodes have a scalar value “potential.” This potential of a node is lower as the hop count from the nearby sink node is smaller. Therefore, a node only forwards data to the neighbor with lower potential than its own for delivering data toward a sink node.
In CPBR, a potential of node n at time t, denoted by

2.3. External Control
CPBR presumes a multisink sensor network and it performs global control of a potential field in order to balance the traffic loads of sink nodes, which is difficult to manage only by local interactions and rules. In CPBR, a control node, which is able to communicate with all sink nodes, is responsible for observing and controlling of potentials of all sink nodes. The control node controls potential of sink node d at time t, denoted by

3. Perturbation Model
We assume four types of perturbations that cause topological changes in the network.
3.1. Varying Wireless Channel Condition
The burst packet errors occur in various timescale as mentioned in [18]. Then, we assume that burst packet errors happen due to varying wireless channel condition according to the Gilbert-Elliot model [19]. In this model, wireless channel is described with two-state Markov chain; that is, each link has two conditions “good” and “bad,” respectively and alternates the conditions stochastically. In this paper, when a condition of a link is “good,” no bit error occurs in the link and when “bad,” bit error and packet loss always happen. The probabilistic transition of the channel condition occurs at fixed cycles
3.2. Node Mobility
The mobility of individual sensor node (except for sink nodes) is based on the random waypoint model [20]. A node determines a destination and moves there with constant speed. After arriving at the destination, it pauses for a definite period of time and moves for a new destination again. This destination and speed are randomly chosen. This mobility brings about quasicyclic changes to the network topology.
3.3. Node Addition/Failure
We assume a random addition and failure of a number of sensor nodes. Since such node addition is carried out in a planned manner, we refer to it as periodical perturbations. Mean time to failure of devices in the network also means that node failure is of a cyclical nature. This node addition occurs at the same time in the simulation, and the same is true for node failures.
4. Design Approaches of the Control Timescale
In this section, we present design approaches for a controlled self-organization-based network particularly focused on control timescales in a MAC layer, a routing layer, and an external control. An overview of their timescales is illustrated in Figure 2 along with those of perturbations.
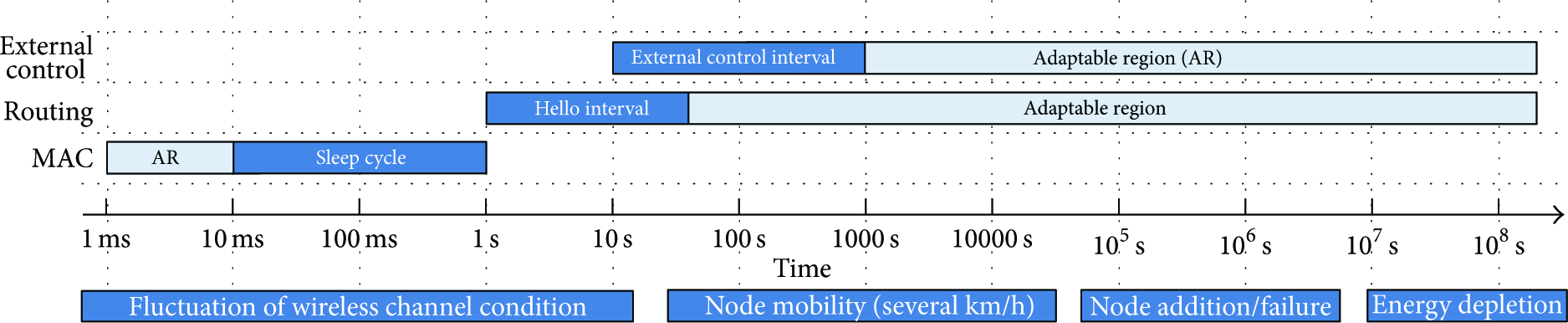
Intervals of environmental changes and each layer's control.
4.1. MAC Layer Design
As to changes of wireless channel conditions that arise with the cycle of 1 ms to 1,000 ms, retransmission in a MAC layer is important. In a MAC layer, a node obtains more opportunities to detect a next-hop node when the cycle of sleep control is shorter, in case the node holds a data for a certain period of time (denoted by
4.2. Routing Layer Design
When movement, additions, and failures of nodes occur, latest route information is necessary for data delivery. Therefore, correct selection of a next-hop node is attained as the updating cycle gets shorter. Similar to possibly supposed scenarios on wireless sensor networks, our research supports static and comparatively slow mobility of nodes, taking account of monitoring application of human health, animal behavior, and so forth. Then, every tens of seconds of periodical messages are used for neighbor detection, and message exchanges to maintain route information.
4.3. External Control Design
Comparatively, long-term perturbations such as movement, additions, and failures of sensor nodes may cause global topological changes, which cannot be dealt with by self-organized routing protocols based on only local information. Thus, since these perturbations degrade the performance of such routing protocols, the control and observation mechanism is required for normal operation.
Similar to the principle of routing layer design, the shorter control and observation cycle seem to be better. However, this cycle is closely bound together with the cycle of self-organized route construction in the routing layer, and therefore, the external control process and self-organized routing process can interfere mutually. In addition, convergence speed of self-organized methods is generally slow, and when the external control is conducted before routes do converge, a system does not satisfy the desired performance.
In order to examine the convergence speed of self-organized potential calculation, first we show analytical solution of the 2-dimensional diffusion equation:

Various boundary conditions can be found in natural world, and we assume two simple Dirichlet boundary conditions:

In the solution,


From (4), it can be found that the potential
For an example of the potential convergence, in Figure 3, the simulation results of the potential convergence in two grid networks (
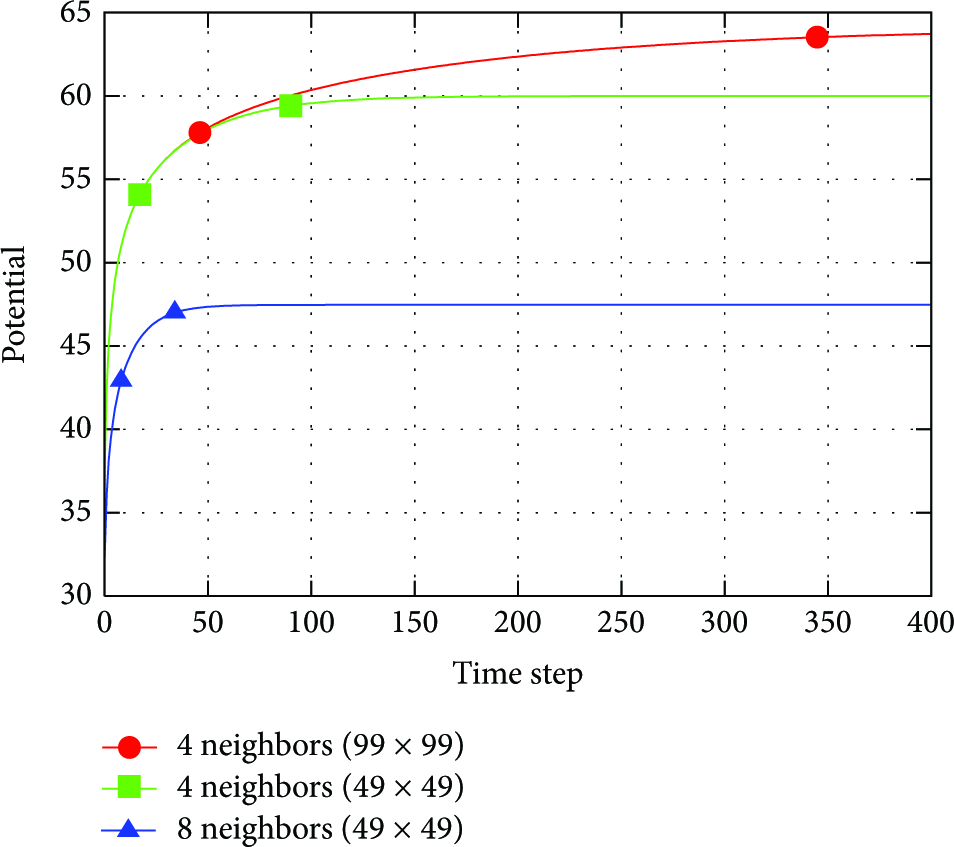
Potential convergence in grid networks.

Potential convergence in random networks.
5. Simulation Results
In this section, we evaluate the packet delivery ratio under the periodical environmental perturbations. We use an event-driven simulator written by C++ for evaluation. For a network model, we deploy 100 sensor nodes at random places over the square region 500 m on a side and install a sink node in a corner of the domain. Each sensor node generates one data every 500 s, and it is delivered to the sink node in a multihop manner. For a communication model, we utilize the disk model, and communication between two nodes within communication range is successful unless a message collision occurs or wireless channel condition between the nodes is bad. The main parameters in a simulation are shown in Table 1.
Setting of parameters.

5.1. Transitions of Channel Conditions
When the cycle of the sleep control in the MAC layer is set to 0.5 s, 1.0 s, and 2.0 s, respectively, the data delivery ratio against the periodic transition of the channel condition is shown in Figure 5. When the transition of the channel condition arises with the cycle of 10 ms and 100 ms, it turns out that shorter sleep control cycles are required for a high data delivery ratio. Since the MAC layer quickly responds to change in the channel conditions and the opportunity of the retransmission in the MAC layer increases as a sleep control cycle is shorter, even if there is no support in an underlying layer, perturbations with shorter cycle are absorbed. On the other hand, when perturbations occur with the cycle more than 1,000 ms, the delivery performance deteriorates greatly, and above the cycle, the MAC layer cannot handle perturbations. Therefore, it is essential to cope with such perturbations in a higher layer.

Packet delivery ratio against channel condition transition.
5.2. Node Mobility
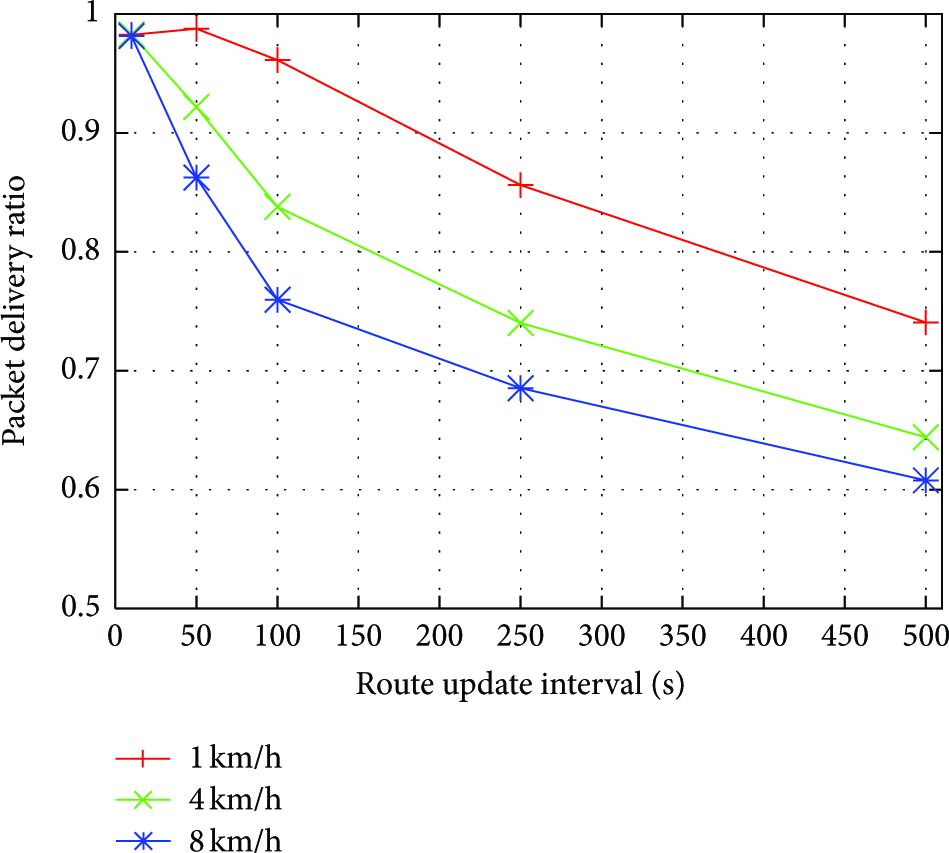
Here, we set the same value to the cycles of potential advertisement and update. In order to eliminate the influence of perturbations other than the cycles, the number of the maximum relay has a sufficiently large value so that there may be no excess. Figure 6 shows that the delivery ratio is decreasing as the update cycle of potential becomes large. It is because as longer the update cycle is, the higher the possibility that a potential of a node is incorrect, and as a result, the node transmits data away from the sink node, or discards the data since there have already been no appropriate next-hop neighbor nodes.

Packet delivery ratio against node mobility.
Given the update cycle of potential is
Packet delivery ratio against node mobility with constant velocity.
5.3. Cross-Layer Interaction
Here, we set two sink nodes at the center (sink 1) and a corner (sink 2) of the network. In Figures 8 and 9, we show the potential of two sink nodes (Figures 8(a) and 9(a)) and the number of received data by the sink nodes at every control interval (Figures 8(b) and 9(b)). In those results, 50 sensor nodes are added at a random position at time 20,000 s, and random 50 sensor nodes fail at 40,000 s. The potential update cycle is set to 50 s as shown in Table 1, and from the preliminarily experiment, it is found that simulation time of 500 s (100 s) can obtain the 99% (90%) convergence of the potential at each node.

Potential control in case of 2 sinks (control interval 500 s).

Potential control in case of 2 sinks (control interval 100 s).
The potential of two sink nodes is controlled by (2) so that the number of received data mutually becomes equal for every fixed cycle. At the beginning of the simulation, more data arrive at sink 1. Then, the control node makes potential of sink 1 up in order to reduce the number of received data by sink 1. Equalization of the received data by the sink nodes is attained at 12,000 s as shown in Figure 8(b) and their potential is also converged. Furthermore, equalization of the received data is attained right from the beginning as shown in Figure 9(b).
Meanwhile, some changes take place to the number of the received data immediately after 20,000 s when addition of 50 nodes occurs. In addition, in this case, convergence finishes within about 10,000 s (or immediately after the perturbation). Shortly after the failures of sensor nodes at 40,000 s, the number of received data decreases. It is because a convergence commences after nodes erase the potential of failed nodes. The time for erasing depends on the potential memory span shown in Table 1. It turns out that after failure, as well as the addition, potential converges.
6. Conclusion
In this paper, we discussed an approach for network design based on controlled self-organization. This approach is for future large-scale and complex networks. As an example of networks based on controlled self-organization, we focus on a wireless sensor network where a self-organized routing protocol and an external control mechanism are applied. In particular, our concern is on cyclic nature of the environmental perturbation. In order to obtain robustness of a system against environmental perturbations, multiple network layers should not handle them separately, but should cope with in a coordinated fashion. We show that our approach can deal with various perturbations by appropriately defining the control timescale of each layer. Further investigation on other perturbations and networks and validation with real experiments are our future work.
Footnotes
Acknowledgment
This research was supported in part by “Grant-in-Aid for JPSP Fellows (24738)” of the Japan Society for the Promotion of Science (JSPS) in Japan.