
Abstract
Cognitive radio network (CRN) is an intelligent network that provides solution to underutilization of spectrum band by detecting spectrum holes. For this purpose, certain important tasks including spectrum sensing, spectrum analysis, and spectrum decision are required to be performed. Spectrum sensing is the crucial step as it is not only responsible for fast and reliable detection of primary users (PU) but also evades disturbance to their transmission. Different methods of enhancements in local sensing scheme have been proposed in the literature. However, cooperative spectrum sensing schemes are preferred as they provide significant gains in CRN performance by countering shading effects. In this paper, an efficient distributed cooperative spectrum sensing scheme is proposed for mobile ad hoc cognitive radio networks. The consensus-based distributed cooperative spectrum sensing (CDCSS) scheme relies on energy detection for local sensing. Random walk mobility model (RWMM) is used for the movement pattern of nodes. Mobility model is employed as movement of nodes results in reduced fading effects and efficient detection. Simulation results were compared with the existing consensus algorithm and equal gain combining (EGC) rule, and the results showed improvement in sensing phenomenon.
1. Introduction
Advancement in wireless communication requires efficient utilization of limited spectrum resources. Recent research shows that this limitation is because of spectrum management policies [1]. To overcome this limitation and for better utilization of spectrum, one requires a new networking standard, which is known as cognitive radio network (CRN) [2–4]. Software defined radio (SDR) is used to build cognitive radio (CR). CR is a smart system that senses the environment called spectrum sensing and adapts to variations in operating parameters. The two prime objectives of spectrum sensing are the efficient detection of spectrum holes and interference avoidance with primary system/licensed system [5–7]. Current research divides spectrum sensing into two branches that are local sensing and cooperative spectrum sensing. In cooperative spectrum sensing, each cognitive radio user (CRU) shares its local observation with the rest of CRUs in the network, which results in improved spectrum sensing.
In cooperative spectrum sensing, the CRUs either forward their sensing information to the central entity or they can exchange sensing information with each other for cooperative decisions. In infrastructure mode shown in Figure 1(a), there is central entity to fuse the sensing results; however, there is no central entity in ad hoc mode also known as cognitive radio ad hoc network (CRAHN) as shown in Figure 1(b). Distinguishing features of CRAHN's are lack of central entity, distributed multihop architecture, dynamic network topology, and time/location-varying spectrum availability [8]. Advancement introduced to the ad hoc network involves mobility and the network is known as mobile ad-hoc network (MANET). In MANETs, devices can move randomly in all directions, and links with other devices are also updated repeatedly. Without utilizing a fixed infrastructure, a dynamic network is established by wireless nodes.
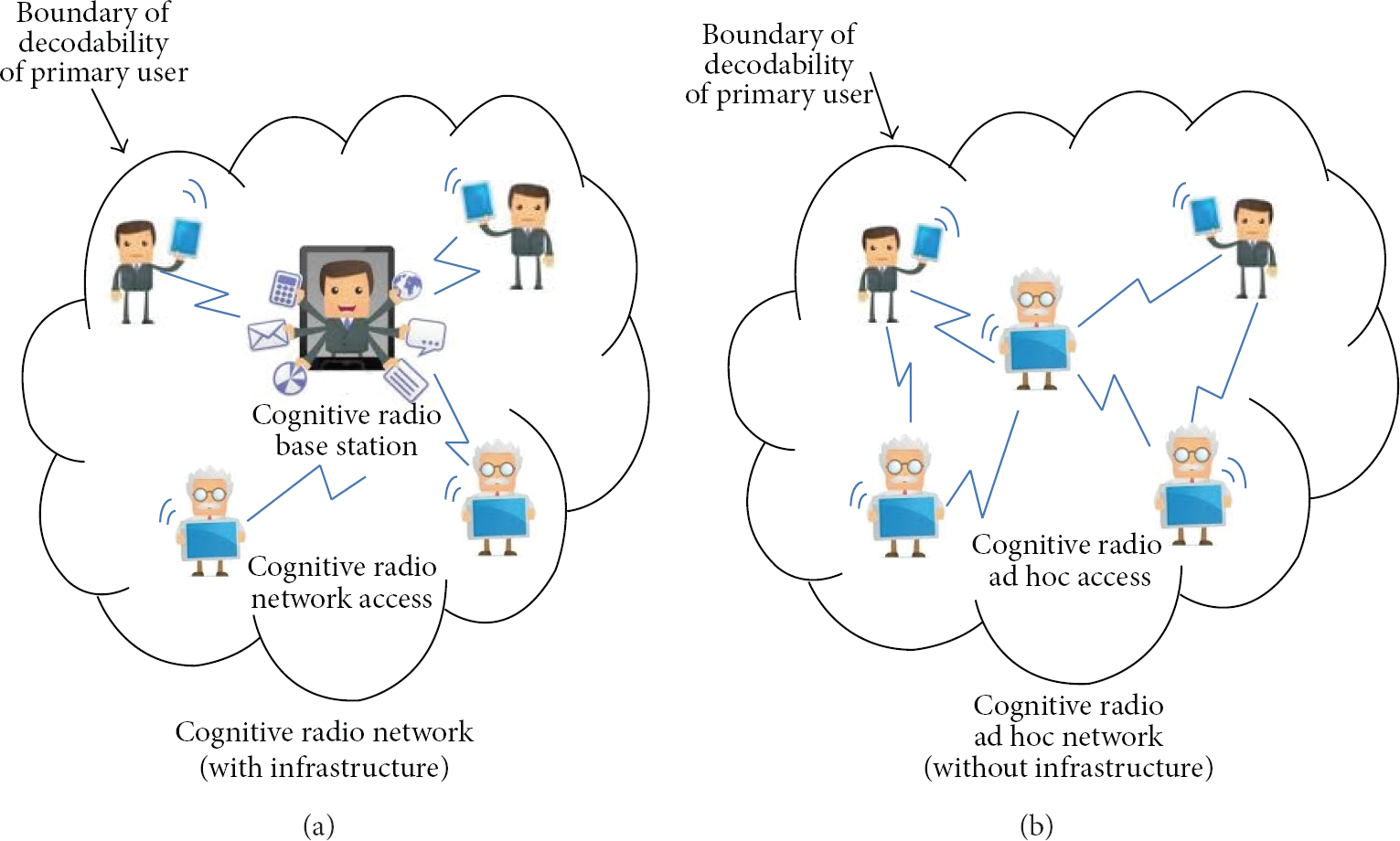
Types of network: (a) infrastructure based CRN and (b) CRAHN.
To achieve a common goal, MANET nodes cooperate with each other because of the lack of centralized control in MANETs. In self-organization of nodes, the major responsibilities are topology organization, neighbor discovery, and topology reorganization [9]. Movement patterns of mobile nodes (MNs) are defined using mobility models. It is important to keep track of node movement because nodes in MANETs are free to move. This also includes information about their speed, location, velocity, and acceleration change over time.
In this paper, a consensus-based distributed cooperative spectrum sensing scheme (CDCSS) in CR-MANET is proposed which is inspired by Novel biological mechanisms. These mechanisms have become an important phenomenon in handling intricate communication networks. CDCSS works on MNs in distributive network without using a centralized center to improve the sensing performance in CR-MANETs. The main contributions of this paper are as follows.
A consensus-based distributed spectrum sensing for CR-MANETs is proposed. Random walk mobility model (RWMM) is used in CRN for the movement pattern of nodes. Through the simulation, the proposed scheme is compared with existing consensus algorithm and EGC-rule scheme.
The rest of the paper is as follows. Section 2 explains work carried out in fields of spectrum sensing and mobility models. Section 3 involves the methodology adopted to develop a scheme for cooperative spectrum sensing among MNs. Section 4 explains implementation process, Section 5 involves analysis, and Section 6 contains conclusion of our work.
2. Background and Related Work
The rapid advancement in wireless applications has resulted in increased usage of unlicensed band, causing a problem of nonuniform spectrum usage [10]. The CR cycle is divided into four broad fields of research to cope with spectrum utilization challenges: (1) the spectrum sensing that determines which portion of the spectrum is available, (2) the spectrum decision that picks the best vacant channel, (3) the spectrum sharing that allows user's coordinated access to channel, and (4) the spectrum mobility that allows vacating the channel when a PU is detected.
2.1. Spectrum Sensing
Spectrum sensing techniques are classified into noncooperative and cooperative spectrum sensing. The three most common schemes for noncooperative transmitter detection are energy detection, matched filter detection, and cyclostationary detection [11–14].
Due to random changing in wireless environment, it is difficult for a single CRU to detect PU signal accurately. To cope with factors such as noise uncertainty, shading, and fading, cooperative spectrum sensing is introduced by researchers. In cooperative spectrum sensing, CRUs cooperate and share their information about PU detection. These methods give more accurate results as uncertainty can be minimized [15].
In decentralized spectrum sensing, there is no requirement of infrastructure and fusion center. Here, the CRUs exchange their information with each other to cooperate. The most well-known decentralized spectrum sensing technique is gossiping algorithm because it performs sensing with a significant low overhead. Other decentralized techniques include clustering schemes which are already known for sensor network architectures. In these schemes, CRUs form clusters, which coordinate among themselves [16].
A gradient based distributed cooperative spectrum sensing method was proposed for CRAHNs [17]. The gradient field changes with the energy sensed by CRU, and the gradient is calculated based on the components, which include energy sensed by CRUs and received from neighbors. The proposed scheme was evaluated on the basis of reliable sensing, convergence time, and energy consumption. This scheme consumes less energy compared to existing consensus-based approach.
Wu et al. [18] proposed a decentralized clustering consensus algorithm based on two phases. First phase is related to clustering CRU with best detection performance and second phase carries out distributed data fusion of the sensing outcomes of the CRUs in the cluster. Like [18], our proposed scheme is also for distributed network but this former scheme does not take into account parameters related to mobility of nodes which on the other hand are a major concern of our proposed scheme.
Ribeiro et al. [19] presented a two-step adaptive combining based technique for distributive cooperative spectrum sensing. In the first step, an adaptive combiner is used for the fusion of neighborhood nodes, and, in the second step, a consensus decision is made by sharing local decisions within the neighborhoods. Their results showed better performance compared to the optimal linear fusion rule.
In [20], a consensus-based spectrum sensing scheme is presented. This scheme is fully distributive where local sensing information obtained by CRUs is sent to their neighbors. Information from neighbors is used by CRUs, and consensus algorithm is applied for stimulating new state for consensus variable. This process is continued till the individual states converge to a common value. Spectrum sensing data falsification (SSDF) attacks are also dealt with by researchers by excluding those nodes from neighbors list that give very much deviation from mean value.
Like [20], our proposed scheme is also for distributed network. The existing consensus algorithm required each node to have a prior knowledge of the upper bound of the maximum degree of the network. Our proposed algorithm is not only fully distributive and robust against SSDF attacks but also does not require prior knowledge of degree of the network. Further, this new algorithm is applied on mobile nodes. For nodes motion, mobility models are investigated.
2.2. Mobility Models
The movement patterns of MN are defined using mobility models. It is important to keep track of nodes movement as nodes in MANETs are free to move. This also includes information about their speed, location, velocity, and acceleration change over time. Bai and Helmy [21] provided a detailed classification of mobility models according to the mobility characteristics, which is also shown in Figure 2. Some models keep track of their history movements and are referred to as models with temporal dependency, while the others are restricted by geographic bounds. There is also a class of mobility models, known as models with spatial dependency, in which nodes move in a correlated manner. Most of these mobility models are random models.

Mobility model classification.
3. Modeling Philosophy
In this section, we will first discuss the spectrum sensing model of CRU and then illustrate the local sensing model and information sharing with neighboring CRUs using CDCSS. Network topology and consensus notions for CDCSS are also presented along with the movement pattern of CRU/MN using RWMM.
Spectrum sensing process is divided into two phases that are local spectrum sensing and cooperative spectrum sensing. For local spectrum sensing, CRUs use energy detection technique to detect PU and make local decision about presence or absence of PU. Reference [12] shows a block diagram of energy detection.
The basic hypothesis model for local spectrum sensing is given as [1, 14, 16]

Received signal is passed through a band-pass filter of bandwidth W and center frequency

3.1. Consensus-Based Distributive Cooperative Spectrum Sensing
In this stage, MNs communicates their local information with their neighbors and make a common decision about presence or absence of PU. They share information via common control channel (CCC). The CCC is responsible for transferring control information and CRUs coordinate with each other using this medium. The CCC not only facilitates cooperation among CRUs but also provides several other network operations that include neighbor discovery, topology change, channel access negotiation, and routing information updates. In this algorithm overlay, CCC was used because CRUs temporarily allocated the spectrum not used by PU. Further, in this algorithm, we assumed that the dedicated CCC is predetermined and usually unaffected by PU activity.
Cooperative sensing is an iterative process where each MN sets


Flow chart for cooperative sensing.
Yu et al. [20] proposed (3) in which constant step size ε is used, which appeared as a limitation as it required each node to have a complete knowledge of network topology and maximum degree of the network. Also, it was applied on fixed network with predefined connections. In this new proposed technique, these limitations were overcome by the following.
Employing a variable Applying further CDCSS scheme on MNs which are travelling considering RWMM: issues faced in case of fixed graph do not occur here as nodes are mobile and motion of nodes causes small-scale fading [24]. As nodes are mobile, nodes with a distance greater than a certain limit are not considered as neighbors, which changes the degree of node (Δ) and makes step size (

3.2. Network Topology Using Random Graph
As stated earlier, each MN creates links with neighbors and communicates local information with them. Network topology used as reference in this research can be represented as a graph G. The graph consists of nodes
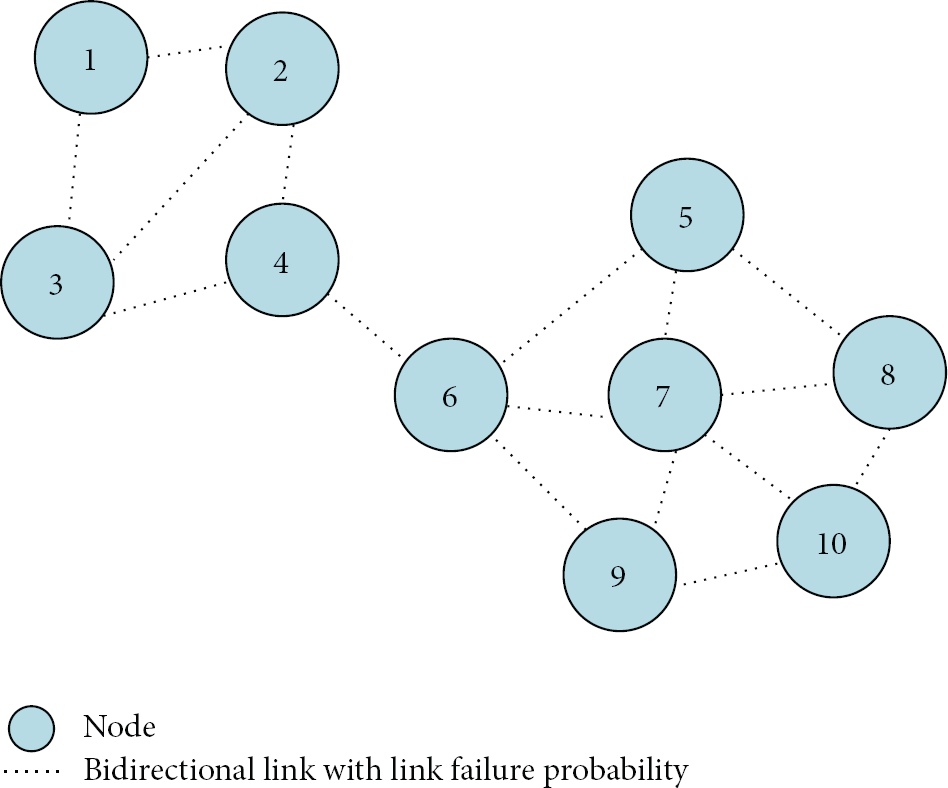
Network topology of 10 MNs.
3.3. Random Walk Mobility Model
The basic idea behind this movement emerged from unexpected movements of particles. It was developed to follow such erratic movement patterns, and hence it became the most widely used mobility model. MN randomly chooses its new speed and direction and then moves from its current location to a new location to which it is to travel. Predefined ranges are used for selecting new speed and direction. For speed, the range can be from minimum speed to maximum speed, and directions can range from 0 to
Different derivates of this model are also developed by researchers. These include 1D, 2D, 3D and d-D walks [25]. Here, we here are concerned with 2D walk, which is also shown in Figure 5. In this example, MN is allowed to choose a speed between 0 and 10 m/s and a direction between 0 and

Mobility pattern of MN using RWMM.
4. Simulation Setup
As mentioned earlier, we used random graph of nodes and assumed that nodes were mobile which follow RWMM for movement patterns. Figure 6 shows the simulation result for movement of 10 MNs. The time period for this simulation was 100 seconds. MN took each move in constant time interval of 1 second. The simulation area in which nodes moved was a 20 m × 20 m rectangle with 15 m transmission range.
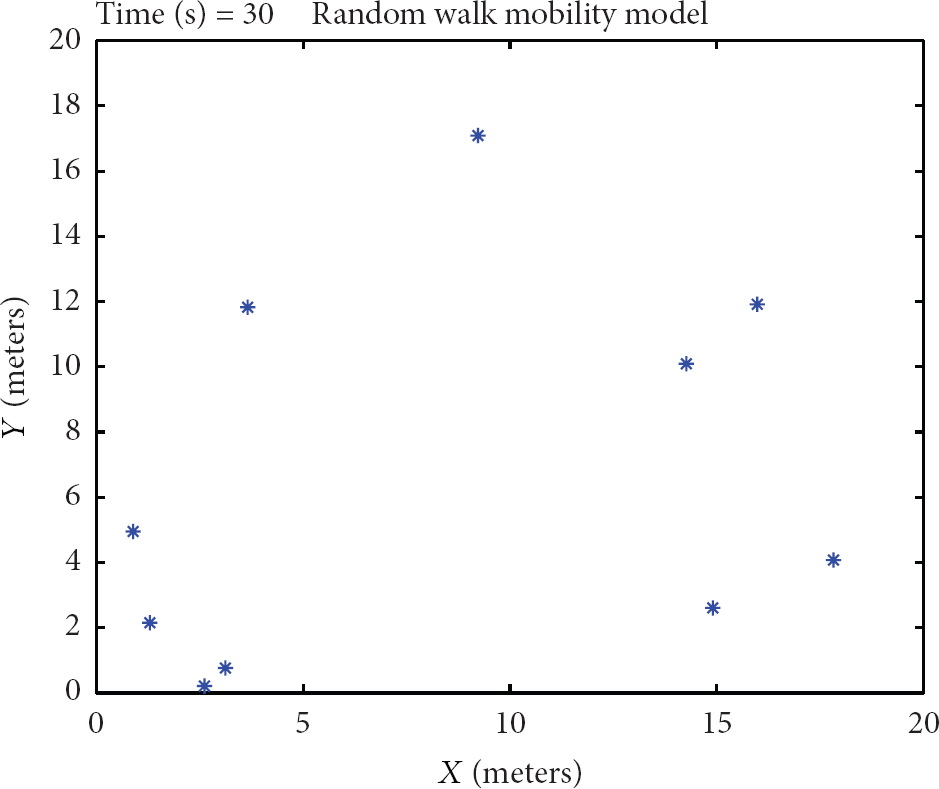
RWMM for 10 MNs.
Such transmission scenario consisting of MNs can be seen in wireless regional area network (WLAN) which has adopted operations of mobile devices [24]. As in RWMM, either a constant time interval or constant speed was used. We considered a constant time interval while speed was variable, which made the distance travelled by MN in each move a variable factor.
4.1. Constraints for Consensus-Based Distributive Cooperative Spectrum Sensing
CDCSS algorithm is based on certain constraints some of which were not considered in [20]. These constraints are as follows:
implementing prediction rule given in (5) to get maximum degree of the network (Δ) which in turn gives range for selection of step size ( sharing local information of MNs with their neighbors, excluding those MN from neighbor list which give maximum deviation from mean value (calculated by taking the average of all values from MN), considering distance restriction, that is, if a neighbor MN exceeds a specified distance then exclude it from neighbor list thus making step size variable (
Above given factor affect affect convergence rate, so the aim through their execution is to fasten convergence rate. Implementation of these constraints is explained below. This whole process of CDCSS and RWMM is also shown via flowchart in Figure 7.

Flowchart of complete algorithm.
4.2. Prediction Rule
The first step for cooperation is to predict maximum degree of the network. Equation (5) gives this prediction rule. Ten-node network is shown in Figure 6; therefore, using prediction rule, the degree of network is calculated as

After getting maximum degree of network, all MNs will continue sharing their local information with neighbors and update their states according to (3). Given below is the simulation results obtained by applying prediction rule and achieving consensus among MNs. The SNR here is a fixed factor having value of 10 dB.
Figure 8 shows estimated PU energy in a network with in a network of 10 nodes. From Figure 8 it is very clear that initially all MNs gave very different energy values which are their local observations. These values are then shared among neighboring MNs, and, after some iterations, consensus is achieved. This is shown in Figure 8 where, after about 13 iterations, difference between the MNs is less than 1 dB and, after about 19 iterations it is less than 0.1 dB. Here 30 iterations are shown for demonstration purpose. If we increase the number of MNs in the network, then number of iterations required to achieve consensus also increases accordingly. As a result, the algorithm also converges slowly.
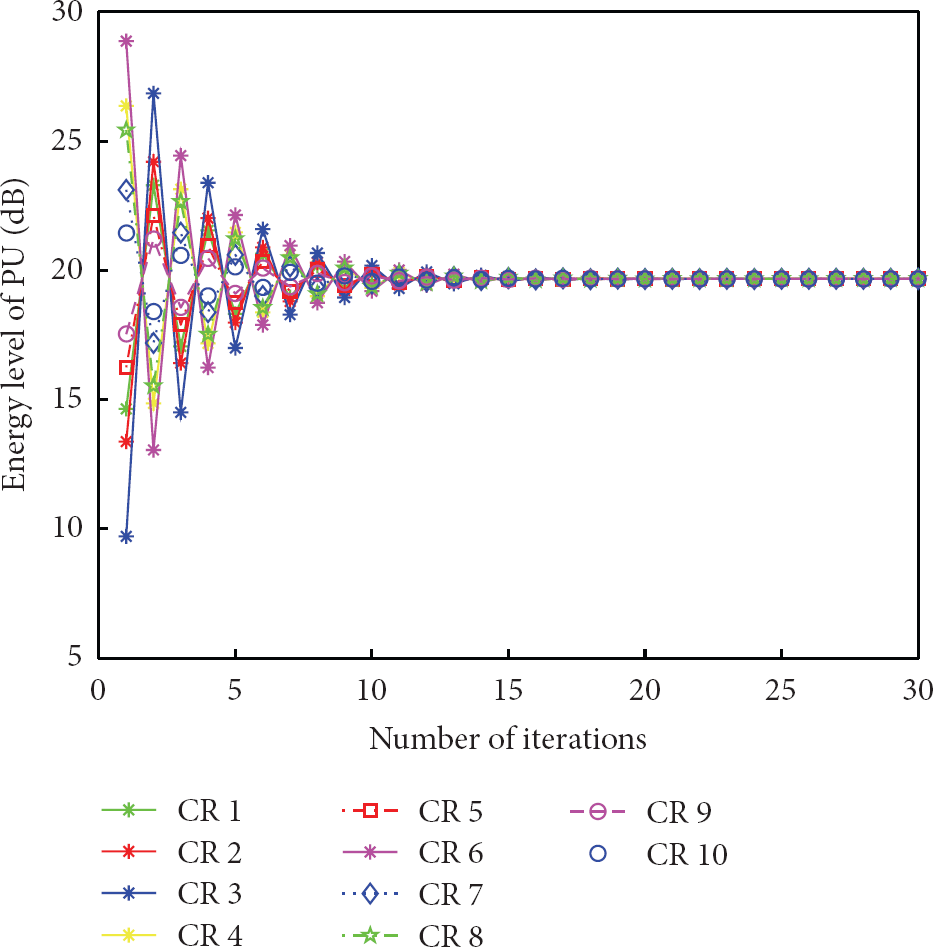
Consensus algorithm with prediction rule.
4.3. Average Value Calculation
It is stated earlier that the consensus process takes place in iterations. With every time instant, that is,
As there was no malicious node in this network of 10 nodes, the result was the same as the result for simulation with prediction rule shown in Figure 8. The convergence value, that is,
4.4. Distance Restriction
We assumed that nodes were mobile and moving considering RWMM constraints. They were moving in a cell of 20 m × 20 m area. This is also shown in Figure 6. Mobility of nodes can cause an increase in signal power and small-scale fading. Considering neighboring list, if the distance between nodes exceeds certain limit, then they can be excluded from neighbor's list. In this scenario of a 20 m × 20 m area, if the distance between nodes exceeds 15 m, then they are excluded from neighbors list. This in turn will cause variation in step size as maximum degree of node is varying. To calculate distance between nodes, Euclidian's formula was used which is given in (7). Simulation result for CDCSS, which also employed this distance restriction, is shown in Figure 9:

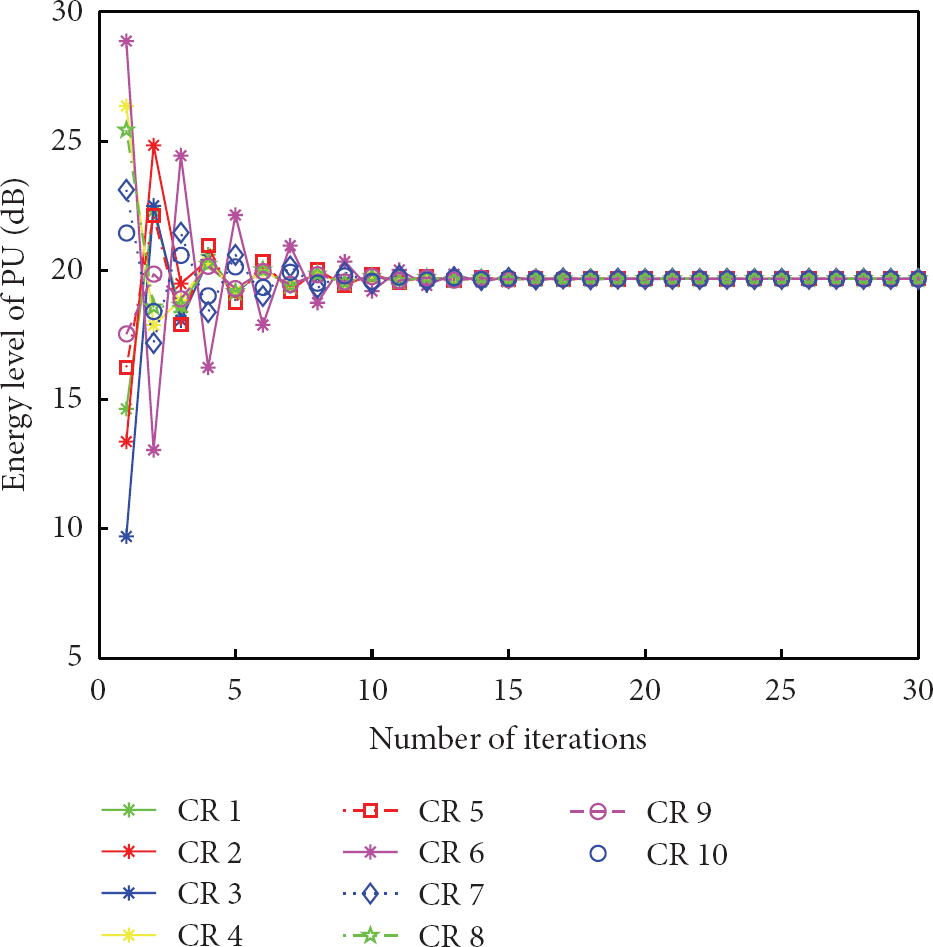
Consensus algorithm with distance restriction.
4.5. Complete Consensus Algorithm
Finally, all these constraints were simultaneously applied to achieve consensus among MN's energy values and come to a common decision about presence or absence of PU. Figure 10 shows a simulation result obtained by considering all the above rules, that is, prediction rule, average value calculation, and distance restriction.
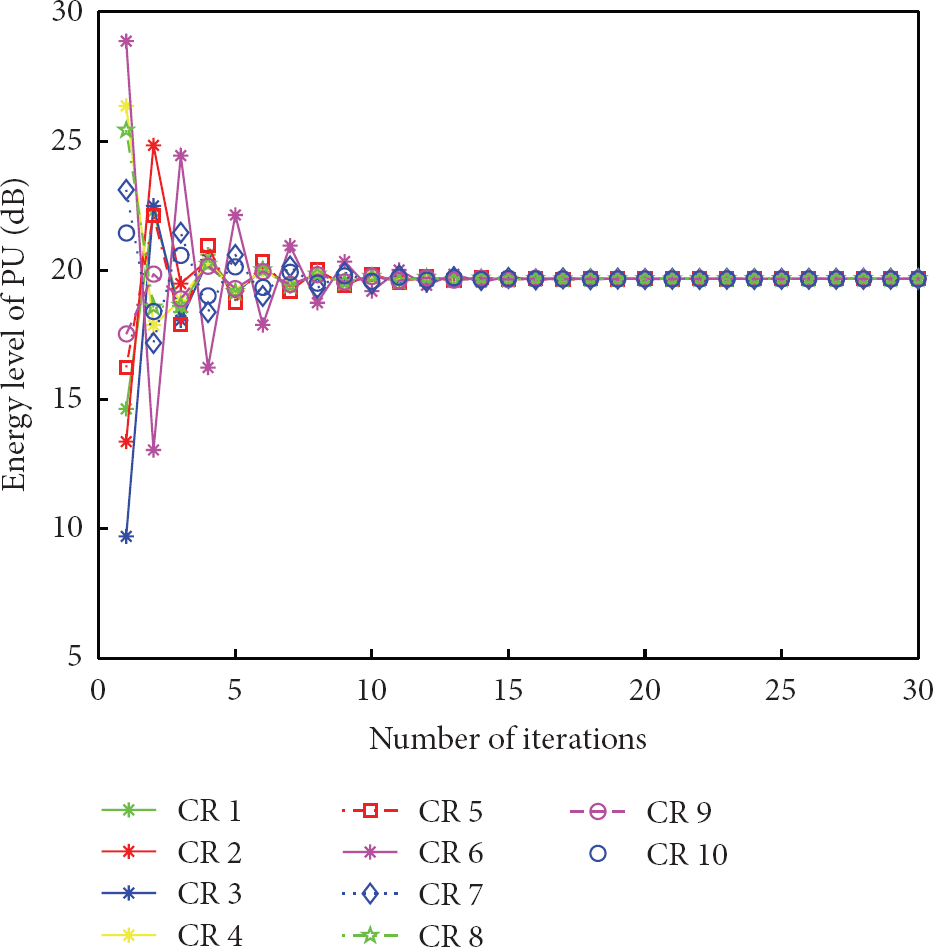
Complete consensus algorithm.
Figure 10 revealed that convergence rate is the fastest in this case compared to all of the rest of the cases. The difference between energy values of MNs is less than 1 dB after 7 iterations and is less than 0.1 dB after 12 iterations. The final converged value is
5. Simulation Results
The CDCSS for distributed network does not have a central entity. Therefore, for analysis purpose, it is compared with techniques that are employed either for distributed network or centralized networks. For distributed network, CDCSS was compared with consensus algorithm given in Yu et al. [20], while, for centralized network, it was compared with EGC rule which is a soft combining rule. EGC is one of the simplest linear soft combining rules where estimated energy in each node is sent to the fusion center where they will be added together. The summation is compared with a predefined threshold, and the decision is made about presence or absence of PU accordingly. Comparisons between CDCSS and EGC rule were made on the basis of
5.1. Comparison with EGC Rule
Firstly comparison was made on the basis of

Comparison on the basis of
It is clear from Figure 11 that CDCSS performs better compared to existing EGC rule. New scheme has lower
Further, in analysis, comparison is made on the basis of varying SNR and sensitivity in detection, that is,

Comparison of the basis of SNR versus
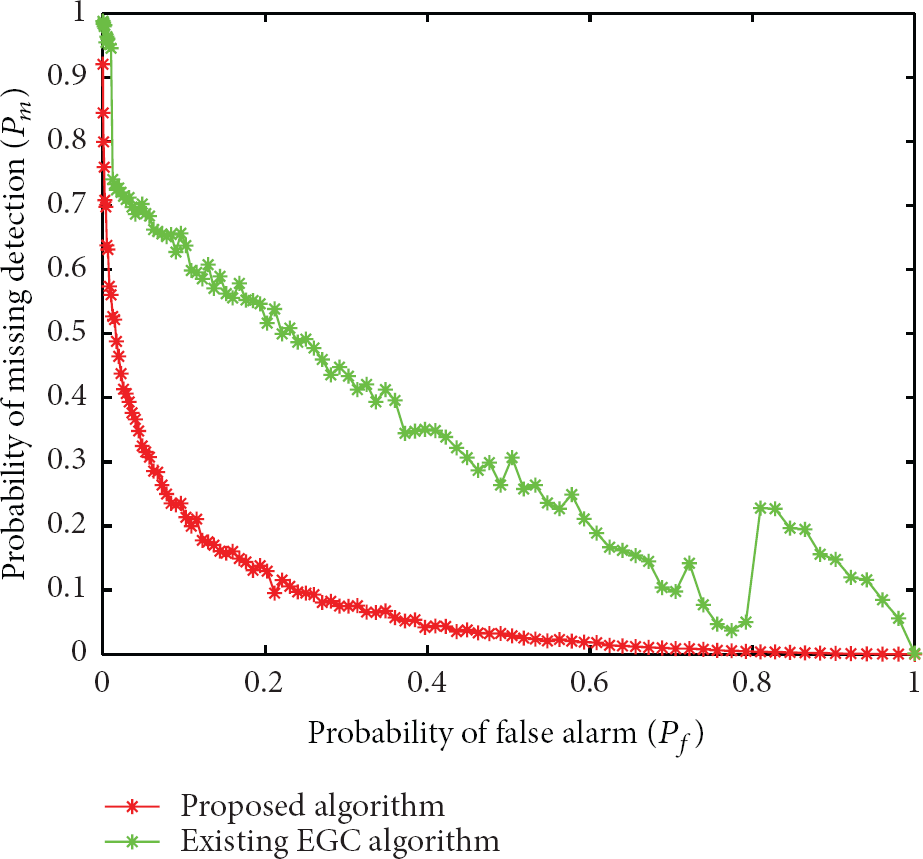
5.2. Comparison with the Existing Consensus Algorithm
CDCSS was also compared with the existing consensus algorithm which was given in Yu et al. [20]. This existing algorithm was also used for distributive network. Figure 13 shows comparison of result for CDCSS and existing consensus algorithm.

Comparison of the basis of
It is clear from Figure 13 that CDCSS has lower Pm than existing consensus algorithm. This means CDCSS has improved spectrum utilization and reduced PU interference. Mobility of nodes aided in better performance of CDCSS when compared to existing consensus algorithm. As in both schemes, nodes need to communicate the degree of network, so energy consumption is approximately the same in both the schemes.
Further, in the analysis, comparison is made on the basis of SNR and
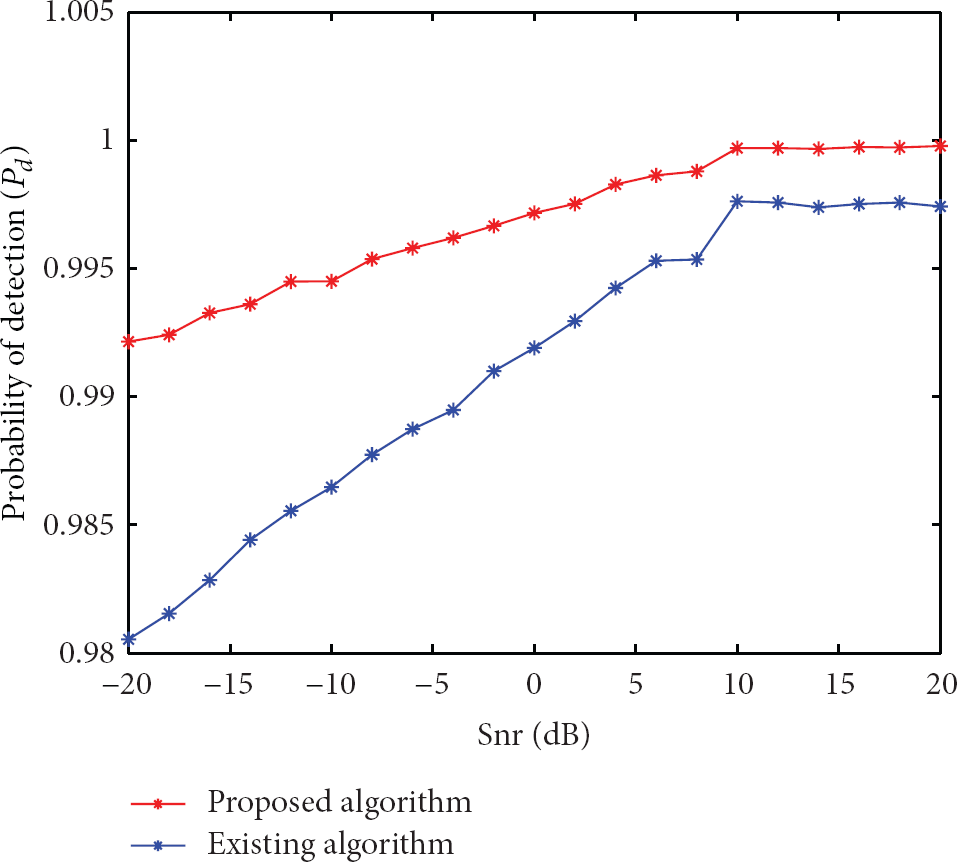
Comparison of the basis of SNR versus
6. Conclusion
Cooperative spectrum sensing is an efficient technique to improve spectrum exploitation. In this paper, consensus-based distributive cooperative spectrum scheme is proposed, which was applied to mobile nodes. The local sensing, in this scheme, was based on energy detection. This is the most widely used local sensing technique as it does not require prior knowledge of network topology and is easy to implement. For cooperative sensing, the proposed algorithm was based on a set of certain rules which includes prediction rule and average value calculation for energy values of unlicensed users. Details of these rules are provided in Sections 3 and 4. This technique was applied on mobile nodes because mobility of nodes results in reducing the fading effect, thus making sensing more efficient. The goal of the proposed scheme was to provide proficient cooperative spectrum sensing technique. The results showed that our technique has the potential to contribute effectively for efficient spectrum utilization. A future direction of study is to consider sensing overheads and to provide optimal spectrum heterogeneous CR-MANET design.
Footnotes
Acknowledgments
This work was supported by the Ministry of Science, ICT & Future Planning (MSIP), Korea, under the Convergence Information Technology Research Center (C-ITRC) support program (NIPA-2013-H0401-13-1003) supervised by the National IT Industry Promotion Agency (NIPA). It was also supported by the Seoul R&BD Program (SS110012C0214831) and Special Disaster Emergency R&D Program from National Emergency Management Agency (2012-NEMA10-002-01010001-2012).