
Abstract
The differential geometry and moment invariants are important approaches in pattern recognition and artificial intelligence. In this paper, a novel approach for mechanical component retrieval is reported. This approach combines local (spatial curvature) signatures and global (moment) features of 3D mechanical component. Mean curvatures are integrated into the computation of 3D moment invariants, and differential moment invariants are constructed. Experiments indicate that differential moment invariants have a lower computation complexity than traditional 3D image retrieval approaches without reducing the retrieval rate.
1. Introduction
In mechanical engineering, searching suitable components or models from 3D image database is an important issue. This problem generally stems from many applications such as 3D shape matching [1], 3D model [2], and automatic assembly for components [3]. In the recent decades, mechanical component retrieval attracts considerable attention.
Traditional 3D models retrieval approaches can be divided into three categories: text-based image retrieval (TBIR) approach, content-based image retrieval (CBIR) approach, and semantic-based image retrieval (SBIR) [4] approach. In the three approaches, TBIR method can only support the retrieval based on keywords; SBIR approach relies on the annotation by users. Therefore, in most mechanical component retrieval systems, CBIR approach can be more simple and effective. Some typical algorithms are listed as follows.
Local Representations. In local approaches, shapes are broken down into boundary segments called primitives. These representations differ in the selection of primitives and the organization of the primitives for shape representation. Common methods include shape distributions approaches [5] and curvature-based descriptors [6, 7]. Local approaches supply precise descriptions. However, they have low robustness to noise and are complex to be implemented.
Global Representations. Global approaches compute a multidimensional numeric signature vector from shape information. Typical methods include 3D moment invariants [8, 9], 3D Fourier descriptors [10], and neural network approach [11]. Global descriptors are robust to noise and have a lower computation complexity, but they cannot achieve a perfect classification rate in recognition to mechanical components with slight different shape characteristics. Figure 1 shows some mechanical components that traditional global approach cannot distinguish.
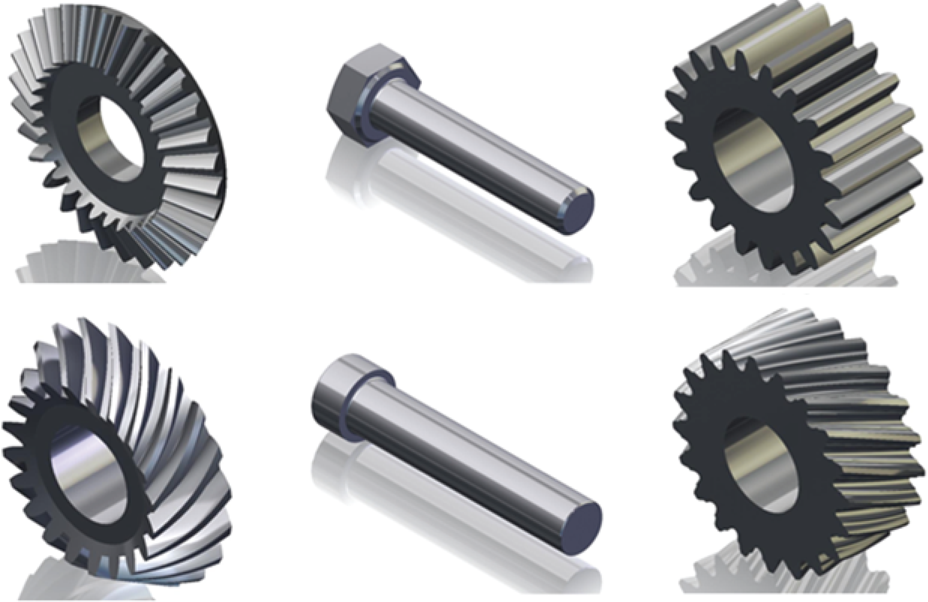
Similar mechanical components.
Therefore, how to fully use the advantages of local and global features has been an important issue [12]. To solve this problem, this paper reports a novel mechanical component retrieval approach. The novel approach, named differential moment invariants, is based on two innovations. The first is to combine mean curvature [13] with 3D moment invariants [8] to represent the local features and global signatures of a mechanical component. The second is to change traditional region-based moment to surface-based computation to reduce the running complexity. Experiments indicate that differential moment invariants have a lower computation complexity than traditional 3D image retrieval approaches without reducing the retrieval rate.
2. Differential Moment Invariants
2.1. Background Information
Mean curvature can be employed for the representation of 3D mechanical component in database. In 3D Euclidean space, a parametric surface S can be represented by two fundamental forms. The two fundamental forms of a surface are uniquely determined by six parameters: E, F, G, L, M, and N [13]. Mean curvature H can be computed according to following formula:

For digital range mechanical component surfaces, approximations can be computed by local polynomial fitting approach [14].
Moment invariants have been widely used in many applications [15, 16]. To a spatial surface, 3D moment of order p + q + r is defined by

where (x, y, z) is the location of pixel on the surface and f(x, y, z) is a function to represent the characteristic of (x, y, z). The central moment of order p + q + r is defined as

The normalized moment μ pqr is defined as

2.2. Differential Moment Invariants
In differential moment invariants, the central moment of order p + q + r will be constructed as follows:

The scaling normalized moment μ pqr to guarantee the scaling invariance of the central moment is introduced as follows:
In order to reduce the computation cost, we choose two differential moment invariants:

2.3. Invariance Proof
This section will prove the invariance of the presented invariants. Because the mean curvature will not change under translation, so the differential moment is invariant under the translation of coordinates.
Now we consider the scaling invariance. Given a spatial discretized surface S, suppose a scaling transform with scaling factor k > 0:

Because

The above formula shows μ pqr is invariant to scaling transforms. So J1 and J2 are scaling invariances. Suppose a rotation transform is applied to the surface as follows:

where n i (i = 1, 2, 3) are three orthogonal unit vectors. For simplicity, set (x0, y0, z0) = (0, 0, 0), one can obtain

Under rotation transformation, the area of a surface is invariant, so v′000 = v000 and dS′ = dS. Adding the previous three formulas and considering

The invariance of J2 can be proven through the analogy approach.
2.4. Similarity Measurement
In this paper, one-order Minkowski distance is employed to measure the difference of each two surfaces in the gallery. Let S and S′ be two mechanical component curved surfaces; the one-order Minkowski distance between the two mechanical components is defined as
In addition, the average retrieval precision (ARP) [17] will be applied in the experiments to measure the precision of mechanical component retrieval.
3. Experimentation Results and Discussions
3.1. Dataset and Compare Schema
In our experiments, we have used a mechanical component dataset constructed from “http://part.3dsource.cn”. In the experiment, some mechanical component categories are selected; every category contains 100 components after randomly applying translation, scaling, or rotation transformation.
In this paper, the threshold value is identified as 20% for similarity measurement. In addition, some traditional representations such as shape distribution, curvature-based method, moment invariants, Fourier descriptor, and neural network approach will be also performed for comparison. The running environment is MATLAB 7.0, 2.0 GHz CPU, and 1 GbRAM.
3.2. Common Mechanical Component Retrieval
This experimentation will test the retrieval performance for common mechanical component. The chosen 15 mechanical components categories are shown in Figure 2.

15 mechanical components categories.
The ARP and running time of applying these approaches are shown in Table 1.
Performance of the first experiment.

Table 1 shows that differential moment has a good retrieval precision and takes low running time. However, this method has not shown obvious advantage compared with some other approaches such as traditional moment invariants.
3.3. Similar Mechanical Component Retrieval
This experimentation will test the retrieval performance for similar mechanical component. The chosen 12 mechanical components categories are shown in Figure 3.

12 mechanical components categories.
The ARP and running time of applying these approaches are shown in Table 2.
Performance of the second experiment.

We can see from Table 2 that the work in this paper can get a good result. Although the traditional moment invariants take the least running time, the ARP is not good. Differential moment costs only 15521 ms in the experiment. Therefore, our approach can get better retrieval performance to mechanical components with slight different shape characteristic.
3.4. Computational Complexity Analysis
Considering a cube with N pixels edge length, the computing complexity of the algorithm can be measured as a function of N. In differential moment approach, computing the mean curvature of every pixel on surface takes O(N2) time; then differential moment invariants can be computed with O(N2); similarity measurement would only cost O(1) time.
Therefore, in total, the whole running time of differential moment approach is O(N2). This is less than traditional region-based 3D moment (O(N3)).
4. Conclusions
This paper combines the idea of mean curvature with traditional 3D moment invariants to solve the mechanical component retrieval problem. Experiments indicate a good result. In the future work, the research of the automatic assembly of mechanical components will be focused on.
Footnotes
Acknowledgments
This work is supported by Natural Science Foundation of China (61202341, 61103203), Postdoctoral Fund (2012M521552, 2012RS4054), and Postdoctoral Fund of Central South University.