
Abstract
In underwater acoustic sensor networks (UASNs), the propagation delay of acoustic signals is much longer than Radio Frequency (RF). There is spatial unfairness problem caused by space-time uncertainty. Hence, the design of Medium Access Control (MAC) is a challenging issue. In underwater, it not only considers transmission time but also takes location into account. In this paper, we propose Response to the Earliest Transmitter of RTS MAC (RET-MAC) protocol to solve the problem. RET-MAC adopts adaptive RTS Contention Phase (RTS CP) to determine the earliest transmitter of RTS. And CTS Delay Phase (CTS DP) is added to postpone sending CTS in order to avoid collision. In addition, we propose CTS back-off mechanism to adjust the length of CTS DP as needed. Contention back-off mechanism is used to reduce network congestion and increase fairness further. The simulation results show that our scheme can achieve higher fairness and throughput; at the same time it also guarantees lower energy consumption and delay.
1. Introduction
Recently, with the development of the computer technology, microelectronics technology, and communication technology, underwater acoustic sensor networks (UASNs) have also got great progress. There are a wide range of applications of UASNs, such as oceanographic data collection, pollution monitoring, offshore exploration, disaster prevention, assisted navigation, and tactical surveillance applications [1]. A Media Access Control (MAC) protocol is used to coordinate the access to the shared acoustic channel among multiple nodes, which is very critical to the network performance [2]. However, unlike the terrestrial wireless sensor networks that mainly rely on radio waves for communications, underwater sensor networks utilize acoustic waves, which present a much harsher environment for both the physical and the data-link layers [3]. In fact, underwater acoustic communications are characterized by three major differences with respect to terrestrial radio: the very low propagation speed; the strongly anisotropic nature, whereby horizontal channels are usually harsher than vertical channels; the significant difference between the power required to operate acoustic transducers and the power required to receive or listen to an acoustic signal [4].
In designing resource-sharing schemes for underwater networks, one needs to keep in mind the peculiar characteristics of the acoustic channel [5]. In [6], Syed et al. point out that the long propagation delay of acoustic media leads to spatial unfairness problem. The nodes nearer the receiver occupy the channel quickly. On the contrast, other nodes away from receiver may be in “starvation” state for a long time. And sensor nodes are battery-powered, which makes the energy of nodes very limited, especially the energy cost required by communications [7]. In addition, compared with terrestrial wireless sensor networks, replacement of these low cost batteries in underwater is a challenging task and uneconomical too [8]. Therefore, there is an important significance to design the fairness and low energy consumption of UASN MAC protocol.
MAC protocols decide how multiple nodes share the underlying acoustic channel, which is critical to the overall network performance [9]. In this paper, we propose Response to the Earliest Transmitter of RTS MAC (RET-MAC) protocol, which can ensure node to contend the channel fairness. According to the sending time of RTS packet, the protocol uses RTS Contention Phase (RTS CP) to determine the earliest transmitter of RTS in order to satisfy spatial fairness. On the other hand, our protocol postpones the transmission of CTS packet by CTS Delay Phase (CTS DP) to avoid collision. Above all, we adopt adaptive RTS CP and CTS DP to reduce delay. In addition, contention back-off mechanism is added to increase fairness further. The simulation results show that RET-MAC not only achieves higher fairness and lower delay, but also has better throughput and energy efficiency.
The rest of this paper is organized as follows. In Section 2, the related work is introduced. In Section 3, we discuss the spatial unfairness issue in UASNs and present our RET-MAC protocol. Then we analyze the protocol parameters in Section 4. After that, we evaluate the performance of RET-MAC in Section 5. Finally, we conclude this paper and discuss some future research in Section 6.
2. Related Work
Currently, there are many MAC protocols for terrestrial RF-based sensor networks, which are devoted to conserve energy and increase system performance by avoiding collision, such as S-MAC [10], CC-MAC [11], and Z-MAC [12]. However, they are not applicable to UASN due to long propagation delay and the characteristics of underwater environment [13]. The MAC protocol design of UASNs is facing many greater challenges, gradually attracting researchers' attention.
In [14], Peng et al. introduce a contention-based MAC protocol with parallel reservation (COPE-MAC) for UASN. In order to establish communication with less rounds of handshakes, they propose parallel reservation, while using cyber carrier sensing to detect and avoid collisions with computation. COPE-MAC can improve MAC performance in both network throughput and energy efficiency. In [3], Chirdchoo et al. study Aloha-based variant protocols, proposing two Aloha-based random access MAC protocols, namely, Aloha-CA and Aloha-AN, for UASN. The two protocols combine Aloha with carrier sensing, use short reservation frame to contend channel, and add some relevant information of data to reservation frame. Other nodes sense the channel to achieve the information which will be sent from neighbor nodes and calculate the busy time of the channel. In the busy time, they take into sleep state in order to reduce energy consumption. Both schemes can boost the throughput by reducing the number of collisions. In [15], Park and Rodoplu propose UWAN-MAC protocol suitable for UASN. It uses relative time stamps, not only in the transmission of data but also in the establishment of communication with newcomers, ingeniously solving synchronization problem between nodes sending and receiving data. And at the same time, it effectively saves energy and reduces the data collision rate. In [16], Hsu et al. propose a Spatial-Temporal MAC (ST-MAC) protocol, which is designed to overcome spatial-temporal uncertainty based on TDMA-based MAC scheduling for energy saving and throughput improvement. They construct the Spatial-Temporal Conflict Graph (ST-CG) to describe the conflict delays and propose the Traffic-based One-step Trial Approach (TOTA) to solve the coloring problem. Through a comprehensive study, ST-MAC has better network throughput and energy cost compared with existing schemes. In [17], Azar and Manzuri propose a MAC protocol based on reserved time slot. It employs a synchronization algorithm to synchronize all nodes and uses the listen/sleep periodic operation for saving energy. In addition, the protocol uses short ranges of underwater acoustic communication links to achieve higher throughput. In [18], Cho et al. propose a PR-MAC protocol, in which nodes exchange information between 2hop neighbor nodes in random accesses period. According to predetermined priority, each node is assigned transmission opportunities with contention free method by TDMA scheme. The reservation period is divided into several slots to transfer data reducing collision. PR-MAC can also reduce energy consumption by reducing period with active mode. In [19], Hong et al. propose an efficient continuous time scheduling TDMA protocol (ECS), including the continuous time based and sender oriented conflict analysis model, the transmission moment allocation algorithm, and the distributed topology maintenance algorithm. By using continuous time based transmission moment allocation scheme, differences of link delays are further utilized and channel utilization of receiver node is improved. At the same time, ECS has higher network throughput and better efficiency.
However, these research works of underwater acoustic sensor networks MAC protocols mainly focused on collision avoidance, throughput, and energy efficiency, but most of them rarely consider fairness. In contention protocols, the long propagation delay of acoustic media leads to spatial unfairness problem. Xie and Cui propose a reservation-based MAC protocol (R-MAC) in [20]. R-MAC has three phases to allocate the channel resources including latency detection, period announcement, and periodic operation. Nodes transfer data at its own slots. At the beginning, node in latency detection phase detects the propagation latency to all its neighbors. In the period announcement phase, each node randomly selects its own listen/sleep schedule and broadcasts this schedule. The data are transmitted in the periodic operation phase. In R-MAC, an intended receiver randomly selects one reservation from the reservations it collects to support fair access of the channel. However, it has low throughput and is not suitable for intensive network. Later, in [6], Syed et al. point out the problem that is long propagation delay of acoustic channel leading to spatial unfairness. They propose the T-Lohi MAC protocol to solve the problem. T-Lohi uses the random back-off method to ensure the fair access of the channel, to overcome the problem of “the nodes nearer the receiver occupy the channel quickly.” However, T-Lohi does not consider hidden terminal problem, resulting in that network throughput becomes lower. In [13], Liao and Huang propose SF-MAC protocol to solve the spatial unfairness. SF-MAC adopts the RTS/CTS handshake method to solve the hidden terminal problem, and during contention period determines the earliest transmitter of RTS packet by Probability Rule. However, in SF-MAC, the contention period is fixed, and the length of the handshake time is longer. It seriously impacts on network throughput. In this paper, RET-MAC protocol considers the hidden terminal problem and solves spatial unfairness. At the same time, it uses adaptive handshake time and some mechanisms to reduce delay and energy cost and improve network throughput.
3. RET-MAC Protocol Design
In this section, we first discuss space-time uncertainly and spatial unfairness problem in UASNs. Secondly, we introduce network model and the basic idea of RET-MAC protocol. Then we analyze RTS CP and CTS DP. Finally, CTS back-off mechanism is used to adjust CTS DP. And we propose contention back-off mechanism to increase fairness further and reduce network congestion.
3.1. Spatial Unfairness of UASN
In terrestrial short-range RF network, propagation delay is negligible. While in UASNs it is essential to consider the location of nodes and transmission time due to the long propagation delay of acoustic media. In [21], Syed et al. first propose that due to long propagation delay of acoustic media, a collision at receiver has space-time uncertainty. In Figure 1(a), when nodes A and B transmit packets at different time, owing to the low propagation delay between A and N, the signals of A and B arrive N at the same time. There happens collision at N. In Figure 1(b), both nodes A and B transmit packets at the same time, owing to different propagation delay node N may successively receive the signals of A and B without collision. These examples show that in UASNs a collision in receiver not only depends on packets transmission time, but also depends on the location of nodes.

(a) Different transmission time but collision at N. (b) Same transmission time, no collision at N. (c) Spatial fairness problem.
Propagation delay of signal is proportional to the distance between nodes, in competition protocol node nearer the receiver easily obtain channel leading to spatial unfairness problem. As shown in Figure 1(c), nodes A and B request the channel, B sends request earlier, and A sends later, while the request packet of A arrives N earlier, node A may first obtain the channel. Therefore, the nodes nearer the receiver occupy the channel quickly, which make relatively distant nodes that cannot fairly use channel. That is spatial unfairness problem.
According to the above discussion of spatial unfairness problem, especially when all nodes frequently require for sending data, nodes away from the receiver cannot effectively obtain the channel. So, this paper proposes RET-MAC protocol to satisfy the spatial fairness. And it adopts adaptive RTS CP and CTS DP to achieve lower energy consumption and delay.
3.2. UASN Model
RET-MAC adopts receiver-based protocol and mainly handles the spatial unfairness. Therefore, in this paper network model consists of a single receiver and n contenders; contenders send RTS to receiver in order to obtain channel and then send data later. This paper assumes that network has these following properties.
All nodes have a unique ID and are relatively fixed. All nodes have similar capabilities (processing/communication), and clock is a weak synchronization. All contenders contend channel and send their data to the receiver. Contenders are randomly distributed in the largest transmission range of the receiver.
The third and fourth properties of network mainly proceed from the receiver. The protocol allocates the channel resources according to the sending time of RTS packet, satisfying that the channel is allocated to the earliest request node.
3.3. RTS Contention Phase (RTS CP)
Based on RTS/CTS method RET-MAC responses to the earliest transmitter of RTS packet to allocate the channel, and all the control packets contain sending time of this packet. During RTS CP the receiver determines the contender which first sent RTS. Then, in order to avoid collision the receiver postpones CTS DP to send CTS. Other contenders which failed competition continue to contend channel after this communication is over. Figure 2 describes the basic idea of the RET-MAC protocol. Assuming that node N is receiver, nodes A, B, and F are contenders. Node N received RTS from A, B, and F in RTS CP and determined A that first sent RTS. Then, receiver N postponed CTS DP to send CTS to A. Finally, node A sent data to N.

Basic idea of the RET-MAC protocol.
Due to long propagation delay of acoustic media, receiver captures the first RTS which may not be the earliest sent, so we add RTS CP to determine the earliest transmitter of RTS packet.
Properties. The length of RTS CP is determined by both the currently earliest sending time of RTS and the time of the first captured RTS. And it is changing dynamically.
Proof.
Assuming that the length of RTS CP is δ, the maximum transmission range of acoustic signal is R. The velocity of underwater acoustic is V. So, the maximum propagation delay is
Firstly, node N captures the first RTS from A at time t. At this time, N regards A as the earliest transmitter of RTS. Because the maximum length of propagation time is T, if the sending time of RTS is earlier than
Therefore, the length of RTS CP is determined by both the earliest send time of RTS and the time of the first captured RTS. And it is changing dynamically according to currently earliest transmitter.

Analysis of RTS CP.
The pseudo-code of RTS CP algorithm determining the earliest transmitter of RTS and the end time of RTS CP is shown in Algorithm 1. The input of the algorithm is current captured RTS packet (r_frame).
Begin function //Achieve send time of RTS (1) r_time = r_frame→send_time (2) (3) free(r_frame) //Free this packet (4) //Update the earliest transmitter (5) first_sendRTS_node = r_frame→sender //Update the earliest transmit time of RTS (7) first_sendRTS_time = r_time //Update the end time of RTS CP (8) RTS_compete_endtime = T+r_time (9) End Function
3.4. Beforehand CTS (BCTS)
In RET-MAC, contenders listen to any control packets from other nodes before sending RTS. In this case the channels have been occupied, and the contenders keep silent and do not participate in this competition. In order to avoid collision, RET-MAC postpones CTS DP to send CTS. However, the hidden contenders that is out of the maximum propagation range of some contenders keep silent until hearing CTS. If these contenders have data to send before receiving CTS, there may cause collision at receiver. Therefore, we add a Beforehand CTS (BCTS) to prevent collision caused by hidden nodes. When the receiver captures the first RTS, it immediately broadcasts BCTS to notify its neighbor that the channel is occupied.
In Figure 4, node N is receiver. Nodes A, B, and F are contenders. Node A achieved the channel and sent data, while node B was out of the maximum propagation range of A, and node B sent RTS (

Add BCTS to avoid collision.
3.5. CTS Delay Phase (CTS DP)
Due to adding BCTS in RET-MAC, and when the length of CTS DP is longer, it can effectively avoid collision. However, the longer handshake time increases energy consumption and seriously affects network throughput. So, in order to reduce delay and energy consumption and improve network throughput, the protocol should consider how to shorten the length of CTS DP without collision. Assuming that the length of CTS DP is q, all control packets (RTS, CTS, and BCTS) have equal size and their transmission times are
In Figure 5, node N is receiver. Nodes A, B, and F are contenders. The instance between N and B is the maximum transmission range, and the propagation delay between them is T. During RTS CP N determines the earliest transmitter F, and the length of RTS CP (δ) is equal to


Analysis of CTS DP.
In addition, the time interval from t to the time of receiving data of N is

We have
BCTS is added, and node N may capture the last RTS at time

From (3), at the end time of CTS DP, there may be RTS which arrive at N. Therefore, if N is in receiving state at the end time of CTS DP, we need to dynamically extend the CTS DP. This paper proposes CTS back-off mechanism to extend CTS DP.
3.6. CTS Back-off Mechanism
When receiver sends CTS at the end time of CTS DP, it may be receiving RTS. This paper proposes CTS back-off mechanism to extend CTS DP in order to be ready for sending CTS again. As the above discussion, the initial value of q is
3.7. Contention Back-off Mechanism
Receiver only communicates with one contender in each communication. In other words, other failed contenders continue to contend the channel after this communication ends. The failed contenders calculate the end time of this communication according to the send time of CTS and propagation delay. And in order to save energy, the failed contenders enter into sleep state until this communication ends. In order to satisfy the fairness of contending channel and avoid network congestion caused by all nodes sending RTS in short time, we propose contention back-off mechanism which makes all contenders postpone

4. Analysis of Protocol Parameters
In this section, we first discuss the maximum probability of extending CTS DP in order to explain that the probability of extending CTS DP is very lower under the initial case. In addition, we also analyze the maximum throughput of network in detail under the above network model.
4.1. The Maximum Probability of Extending CTS DP
The Maximum Probability of extending CTS DP (MP-CD) is defined as the maximum probability of what CTS DP is extended to be ready again for sending CTS, because receiver may be receiving control packet at the end time of CTS DP. In Figure 6, node N is receiver. Nodes A, B, C, and F are contenders. The distance between C and N is the maximum propagation range. Nodes B and C are out of the max propagation range of F. We analyze MP-CD under the condition of

Example of network configuration.
As shown in Figure 7, node N in RTS CP determined F which first sent RTS. The time interval from the sending time of F's RTS to the end time of CTS DP is

Analysis of MP-CD.
We assume that all contenders have data packets to send at the end of each communication and send RTS to contend channel. According to contention back-off mechanism, the maximum length of contention windows is

In addition, we assume that the distance between receiver and the earliest transmitter of RTS is d. We can conclude

The number of nodes in the blank areas of Figure 6 satisfies

Assuming that the maximum propagation range of nodes R is 500 meters, acoustic velocity V is 1500 meters per second, d set

The relationship of n,
As shown in Figure 8, when n is constant,
4.2. Maximum Throughput
This section estimates the maximum throughput of RET-MAC in the above network model. In this network model, the maximum throughput can be shown as the maximum packet which the receiver has received. We assume that the network is in ideal state without any collision. The processing delay of node is negligible. Every node has data packets to send and fairly transfer packets.
Figure 9 describes a data communication cycle.


Data communication cycle.
Assuming that the network operation time is
From (10), the maximum throughput is relative to q and T. However, in specific operating conditions the value of T is fixed. There is no idle time with short CTS DP that can achieve high throughput. So, we take

5. Protocol Performance Evaluation
In this section, we first present main performance evaluation index. According to fairness index [18], we define Spatial Fairness Index and Delay Fairness Index. Secondly, simulation environment and working parameters are present. Finally, we analyze and compare RET-MAC with other MAC protocol by evaluating some important medium access metrics such as fairness, delay, throughput, and energy consumption.
5.1. Main Performance Evaluation Index
Fairness is an important aspect of underwater network protocol. RET-MAC is to solve spatial unfairness problem. This paper analyzes spatial fairness from throughput. If contenders have very good spatial fairness, when they have equal traffic rate, all nodes have equal data packets to send not because of their distance from the receiver. Therefore, this paper uses throughput to react spatial fairness. In addition, the transmit delay of data packets is also an important aspect of underwater network protocol; lower and fairness transmit delay can effectively improve network performance. The fairness index [22] has been widely used as a standard to deal with fairness problem. Thus, we also define the spatial fairness index and the delay fairness index based on it.
(1) Spatial Fairness Index. In this section, we analyze spatial fairness from throughput. We assume that in aforementioned network model there are n contenders. According to this paper needs, we define Spatial Fairness Index (SFI) as follows:

(2) Delay Fairness Index. The transmit delay of packet includes waiting delay, transmission delay, and propagation delay. In UWSN, propagation delay is longer. And it is proportional to the distance between nodes. Therefore, under network model of Figure 10 we analyze delay fairness. In this way, transmission delay and propagation delay of packet are equal, so delay fairness of packet depends on fairness of waiting time.
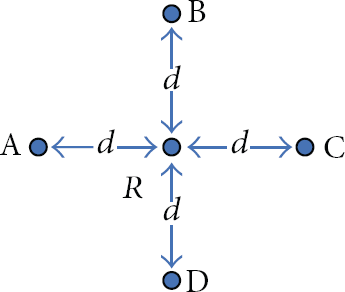
Simulation topology of delay.
We still use the fairness index [22] to define Delay Fairness Index (DFI) as follows:

5.2. Simulation Environment and Working Parameters
We implement RET-MAC protocol in Aqua-Sim [23], an NS-2 based simulator for UWSN, developed at the Underwater Sensor Network (UWSN) Lab at the University of Connecticut. The simulation environment consists of a single receiver and n transmitters. All transmitters are randomly dispersed in the sensing region of receiver. Each transmitter will transmit data, which follows the Poisson arrival process with average traffic generation rate λ. For power consumption, we also use the numbers from a practical acoustic modem as follows: transmitting power 50 W, receiving power 3 W, and idle power 80 mW [24]. All simulations last for 1000 seconds and all the results are obtained from the average of 100 runs. The setting of key simulation parameters are listed in Table 1.
Simulation parameters.

We compare RET-MAC with another MAC protocol by evaluating the important medium access metrics such as fairness, throughput, energy consumption, and delay. For first three aspects, we consider two different scenarios where Scenario-1 has 20 transmitters, and the data generation rate λ of each transmitter increases from 0.01 to 0.1 packets per second. In Scenario-2, we fix traffic rate λ to 0.05, and the number of contenders increases from 5 to 40. For delay simulation environment, we adopt 4 contenders and one receiver based on Figure 10. The data generation rate λ in this scenario increases from 0.01 to 0.05 packets per second.
5.3. Analysis of Simulation Results
In this section, through simulations, we would like to study the performance of RET-MAC and compare it with COPE-MAC [14], R-MAC [20], and RET-MAC-L in UWSN. COPE-MAC protocol is a new MAC protocol based on RTS/CTS. It adopts parallel reservation to improve communication efficiency and uses cyber carrier sensing to detect and avoid collisions. In the long propagation delay of UASNs especially, COPE-MAC can improve MAC performance in both network throughput and energy efficiency. R-MAC is a reservation-based MAC protocol. It carefully schedules the transmissions of control and data packets avoiding data packet collision completely. In R-MAC, each node adopts periodic listen/sleep to reduce energy waste in idle state and overhearing. And intended receiver randomly selects one reservation from the reservations that it collects, so it supports fairness. RET-MAC-L is a special case of RET-MAC protocol. Due to adding BCTS, we take
(1) Spatial Fairness. According to Section 5.1, we analyze spatial fairness by (12) SFI. Figure 11 shows that both RET-MAC and RET-MAC-L have very good spatial fairness. No matter what data rate is high or the number of nodes is large, SFI is approximately equal to 1. Thus, both ways of response-to-the-earliest-transmitter and contention back-off mechanism can provide effectively fair access channel of contenders. However, SFI of COPE-MAC decreases with traffic rate and the number of nodes increasing. Although in COPE-MAC the intended receiver will randomly pick the senders to establish connection and by one reservation it can transmit more packets at different time, it does not weigh the fairness access of all nodes. Also, despite the fact that R-MAC supports fairness, in Figure 11(b) when the number of nodes becomes larger, collision rate is very high. So, its fairness shows very bad compared with other protocols. While just the number of contenders is small, R-MAC shows better fairness. For example, in Figure 11(b) the traffic rate is fixed, when the number of contenders is 5, and SFI is equal to 1. But when the number of contenders increases to 40, SFI is less than 0.05.

(a) Spatial fairness index with traffic rate. (b) Spatial fairness index with number of contenders.
(2) Delay. Figure 12 shows the average transmit delay of packets under the structure of Figure 10. As we can see from Figure 12, RET-MAC has lower average transmit delay of packet, because using dynamic adaptive RTS CP and CTS DP makes both the handshake time and makes the transmit delay of packet shorter. While RET-MAC-L uses fixed time, so the average delay of packets is slightly higher than RET-MAC. For R-MAC protocol, collision rate increased with traffic rate. So, when traffic rate is higher, average delay of packets is larger. Figure 13 shows delay fairness of packets. We analyze delay fairness of packets by (13) DFI in Section 5.1. The delay fairness of packets of both COPE-MAC and R-MAC reduces with traffic rate increasing. However, RET-MAC still has much more stable delay fairness; its DFI maintain at 0.8 or more, even remaining good delay fairness in case of lower average delay.
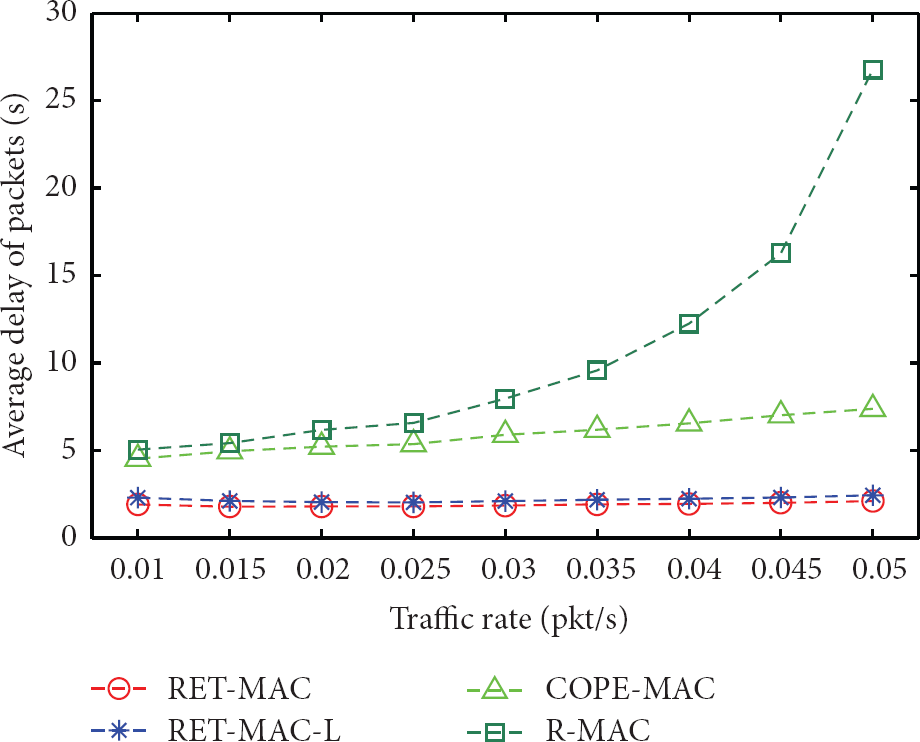
Average delay of packets with traffic rate.
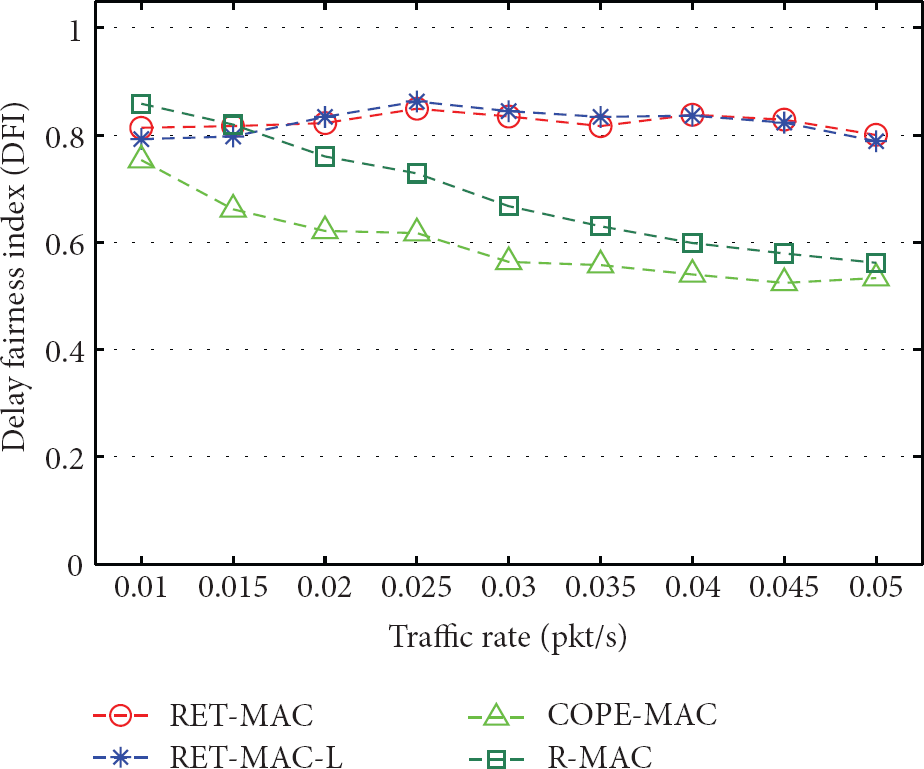
Delay fairness index with traffic rate.
(3) Throughput. In the above simulation model, channel utilization can be replaced by throughput. As shown from Figure 14, both two changes of traffic rate and contenders, RET-MAC has better throughput. In Figure 14 especially, when traffic rate or contenders are lower, the packet delivery ratio of RET-MAC is equal to 100%, because RET-MAC used dynamically adaptive RTS CP and CTS DP, under avoiding collision which can effectively shorten the length of handshake time to improve network throughput. Furthermore, in Figure 14 data line of “Analytical” is drawn according to (11) and simulation environment parameters. There is only a small gap between RET-MAC throughput and analytical thought in Figure 14. There are two main reasons: first, owing to adopt contention back-off mechanism, there is a small idle time between twice data communications; second, the data line of “Analytical” is calculated under the ideal state.
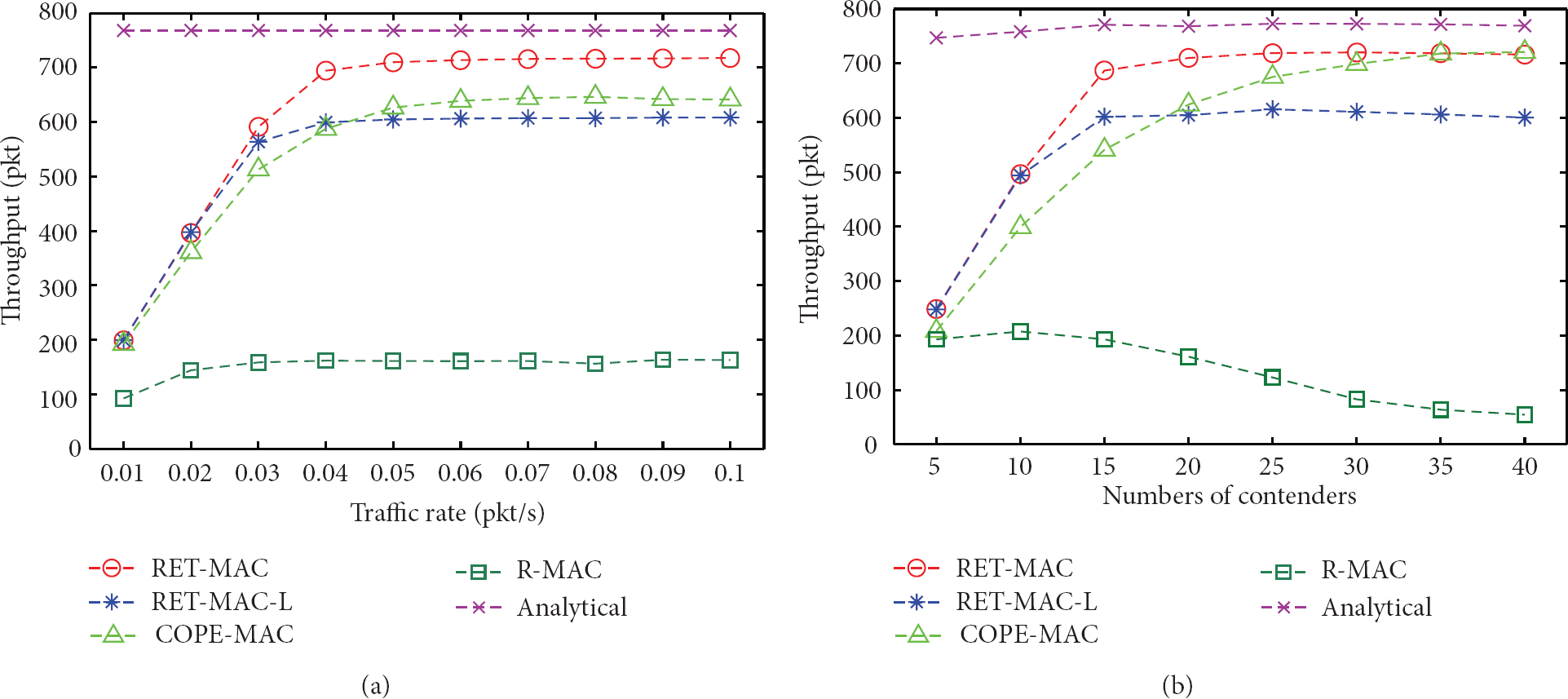
(a) Throughput with traffic rate. (b) Throughput with number of contenders.
COPE-MAC can achieve higher network throughput with using parallel reservations and cyber carrier sensing mechanism, but it is still lower than RET-MAC. Due to using a fixed length of sum of RTS CP and CTS DP, the handshake time of RET-MAC-L becomes longer than RET-MAC. Therefore, its throughput becomes lower. R-MAC uses listen/sleep mechanism which seriously impact on the network throughput. And R-MAC does not apply to intensive networks; otherwise there is lower throughput.
(4) Energy Consumption. Energy consumption is another important aspect of UASNs, because lower energy consumption can effectively extend lifetime of network. From Figure 15(a), we can see that for all protocols, average energy consumption of packet decreases at first with traffic rate increasing. When traffic rate is equal to 0.01 pkt/s, in idle state energy consumption accounts for most of all energy consumption. So, average energy consumption of packet is higher. After traffic rate arrived at 0.04 pkt/s, the data lines of average energy consumption leveled off. Figure 15(a) also shows that RET-MAC can achieve much higher energy efficiency than other protocols. From Figure 15(b), we can see that average energy consumption increases with number of contenders increasing. Compared with other protocols, RET-MAC has lower energy consumption. Although R-MAC adopts listen/sleep mechanism to save energy, network collision increases with contenders. Therefore, when the number of contenders arrives at 40, average energy consumption of packet is higher. In addition, because RET-MAC shortens handshake time and reduces waiting time of contenders, average energy consumption of RET-MAC is lower than RET-MAC-L.
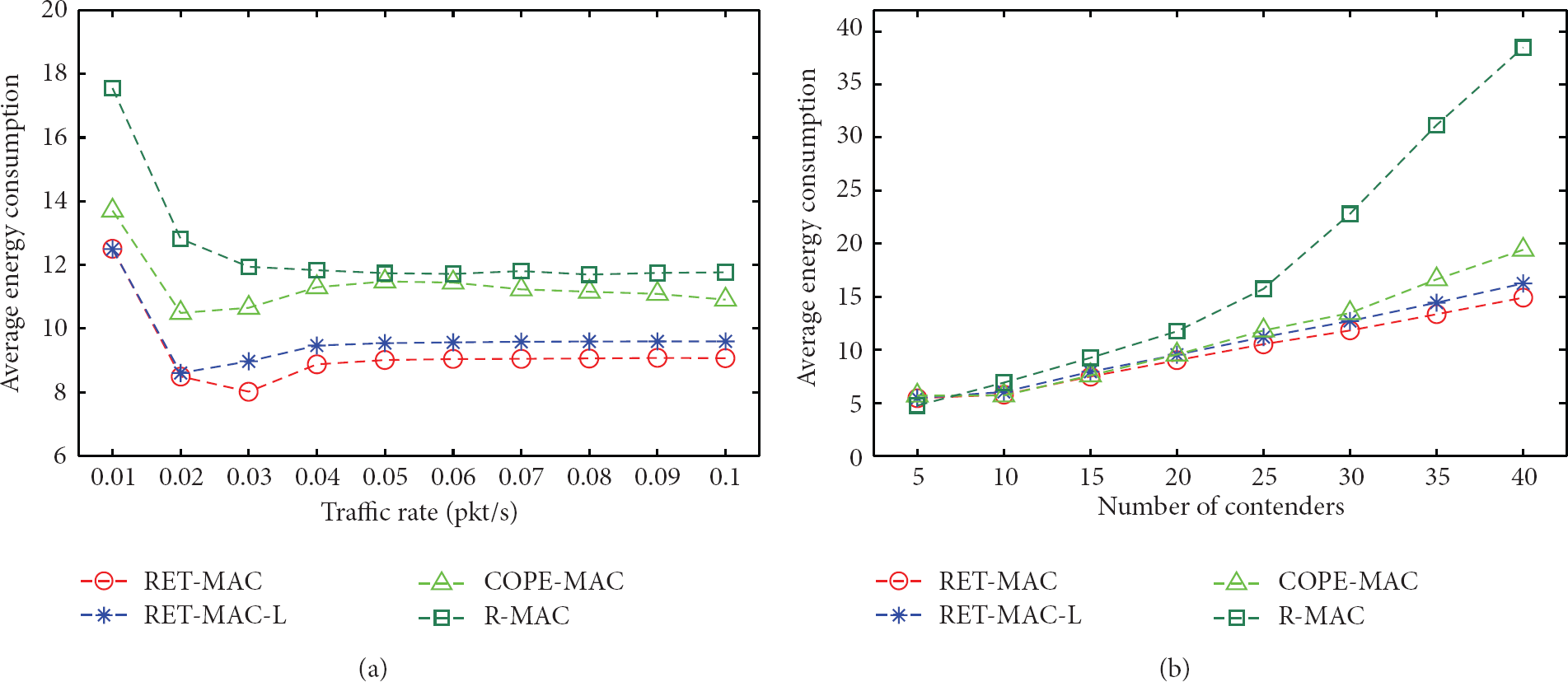
(a) Average energy consumption with traffic rate. (b) Average energy consumption with number of contenders.
6. Conclusion
This paper discussed spatial unfairness problem and proposed Response to the Earliest Transmitter of RTS MAC (RET-MAC) protocol to achieve fairness. RET-MAC adopts adaptive RTS CP to determine the earliest transmitter of RTS. And CTS DP is added to postpone sending CTS in order to avoid collision. We also proposed CTS back-off mechanism to adjust the length of CTS DP as needed. In addition, contention back-off mechanism is used to reduce network congestion and increase fairness further. The simulation results show that our scheme can achieve higher fairness and throughput. At the same time, it also guarantees lower energy consumption and delay. As future work, we will still explore fairness problem when time is not synchronization, and study fairness control is based on network load and amount of sensed information in order to enhance fair using of network bandwidth.
Footnotes
Acknowledgments
This work is supported by the Foundation of Jiangsu University under Grant no. 12JDG103, National Natural Science Foundation of China under Grant no. 61272074, Science and Research Projects for Graduate Students of Jiangsu University under Grant no. 11A135, the Foundation of Jiangsu University under Grant no. 12JDG104 and College Students' Practice Innovation Training Program of Jiangsu Province under Grant no. 2012JSSPITP1256.