
Abstract
Tracking has attracted much attention over the past few years, particularly in the field of distributed sensor network. The most challenging issue is nonline of sight (NLOS) problem in cluttered environments such as indoor or urban areas since the presence of NLOS errors leads to severe degradation in the tracking performance. In this paper, we propose a novel robust tracking algorithm to mitigate the measurement noise and NLOS error. The robust localization method is firstly employed to estimate the positions of the mobile node with different subgroups. Then the residual test method is used to remove the larger localization error. Finally, the modified Kalman filter is introduced to improve the tracking accuracy. Simulation results show that the proposed algorithm can track the mobile node and estimate the position with relatively higher accuracy in comparison with existing methods.
1. Introduction
Due to the rapid development of the distributed sensing and wireless communication technologies, the distributed sensor network has emerged as a promising solution for a wide range of applications, such as habitat monitoring, energy management, and military initiatives [1]. The sensor node has the ability to collect, process, and store measurement information, as well as to communicate with other nodes via the wireless communication. Tracking technologies, which are designated to estimate the trajectory of a mobile object (or mobile node), have attracted much attention in recent years because of the increasing demand on location based services [2]. The tracking schemes estimate the position of the mobile object based on measured signals from the beacon nodes.
A number of tracking measurement methods have been widely studied with various types of signal measurements, including time of arrival (TOA), time difference of arrival (TDOA), angle of arrival (AOA), and received signal strength (RSS) [3–5]. TOA measurement method relies on the travel time of signal between mobile node and beacon nodes, but this method is affected by the synchronization error seriously. TDOA method measures the signals' arrival time difference between beacon nodes and mobile node. This method needs extra hardware configuration. As an inexpensive approach, RSS has established the mathematical model on the basis of path loss attenuation with distance. AOA method depends on the direction of propagation of a radio frequency wave incident on the antenna array. In this paper, any of the ranging measurements can be used in the proposed algorithm.
If the line of sight (LOS) propagation environment exists between the mobile node and beacon node, a high tracking accuracy can be achieved when the traditional Kalman filter is employed. However, for tracking in indoor or urban areas, where there may be no direct path between the mobile node and beacon node, the signal measurements include an error due to the excess path length traveled because of reflection or diffraction, which is termed the nonline of sight (NLOS) error [6]. The NLOS error degrades the robustness and accuracy of tracking system. Mitigation of the NLOS error in the tracking problem has received much attention.
In this paper, we propose a robust tracking algorithm in NLOS environment.
Following are the primary contributions of this paper.
The proposed algorithm does not need the statistical models or prior information on NLOS channel conditions. The proposed algorithm does not require the identification of LOS and NLOS and it is independent of the physical layer used to perform ranging. Our approach is robust against the NLOS error.
The rest of the paper is organized as follows. Section 2 introduces the related works. And Section 3 provides the system model. We will introduce our proposed algorithm in Section 4. Some simulation results will be presented in Section 5. The conclusions are given in Section 6.
2. Related Works
Several methods have been proposed to deal with the NLOS problem. Generally, these methods can be categorized into three different types.
The first type of methods uses all the available LOS and NLOS measurements. In [7], the authors proposed a Kalman based interacting multiple model (IMM) smoother to mitigate the NLOS error. The mode probabilities of the propagation conditions can be calculated and updated by a likelihood function. Then the Kalman based IMM algorithm is used to combine the estimation results of the two parallel Kalman filters with corresponding mode probabilities. In [8, 9], the authors proposed extended Kalman based IMM with data fusion method and fuzzy based IMM smoother, respectively. Chen [10] proposed a residual weighting algorithm which uses the sum of squared residuals of a least squares estimation as the indicator of the accuracy of calculated node coordinates. All possible combinations of the measurements are used and the least square estimator is employed to estimate the location. Finally the estimated location is computed as a weighted combination of these intermediate estimates. Hammes et al. [11] proposed a robust extended Kalman filter based on robust semiparametric estimators for tracking. In [12], the authors proposed an NLOS mitigation algorithm for tracking in mixed LOS/NLOS environment. This method is a combination of hard and soft decision approach; that is, the large outliers are discarded and other results are weighted with different probabilities. In [13], the authors presented an iterative algorithm for robust position estimation in harsh LOS/NLOS environments.
The second type of methods firstly identifies the signal propagation condition and then mitigates the NLOS error. These methods need the statistical models or prior information on NLOS error. In [14], the authors proposed a technique to determine the propagation condition between the mobile node and beacon node via the TOA and AOA measurements. In [15], the authors proposed an improved Rao-Blackwellized particle filter method to estimate the LOS/NLOS sight conditions by particle filtering using the optimal trial distribution. Then the decentralized extended Kalman filter method is applied to analytically compute the location. Ke and Wu [16] proposed a low complexity identification method based on innovation vectors. In [17–19], the authors proposed NLOS identification method such as hypothesis test, likelihood ratio test, and statistical analysis methods, respectively. If the identification is correct, the accuracy can be achieved. But there is always the possibility of wrong identification.
The third type of methods is termed pattern matching method. Since the NLOS error introduces some problems for fingerprinting method, only powers and delays of paths are taken into account. The Doppler information was taken into account since it had the effect of mitigating the NLOS error [20]. In [21], the authors proposed a method which combined with fingerprinting-geolocation and neural networks to overcome the NLOS error. This method provided better propagation characteristics of the wireless signal, in addition to a better interpretation of the signature parameters due to the neural networks. In [22], the authors proposed a hybrid method which followed a Levenberg-Marquardt based iterative algorithm to reduce the NLOS error. And the arrangement of reference nodes method was also introduced to create a fingerprinting database.
3. System Model
In this section, we firstly introduce the measurement model. Then we describe the state model.
3.1. Measurement Model
The distributed sensor networks compose of three node types: mobile node, base station, and beacon nodes in two-dimensional region. The mobile node whose location is unknown can collect the data from beacon nodes and convert the measurement into distance. It estimates the location through the tracking algorithm. The beacon nodes are fixed in the known locations. There are N beacon nodes and one mobile node in the field. The location of mobile node at time k is



3.2. State Model
The state at time k is defined as the vector:

The state vector with random acceleration can be modeled as:

The measurement equation is defined as

Since measurement equation is linear, the observation model is defined as
4. Tracking in NLOS Environment
4.1. General Concept
In this subsection, we describe the details of the proposed algorithm. The flowchart of the proposed algorithm is illustrated in Figure 1. Firstly, we group the measurements and employ the robust localization method to estimate the position of the mobile node. We use the residual test method to remove the larger localization error. Finally, the Kalman prediction and fusion based Kalman update are used to improve the localization accuracy.

The flowchart of the proposed algorithm.
4.2. Grouping and Robust Localization
We construct

Equation (8) can be rewritten as

The linear model at time k is given by


The vector of unknown parameters is
The log-likelihood function of residual

By differentiating (12) with respect to vector
Since the location score function is usually unknown, Huber [23] suggested replacing the location score function by an influence function as

The score function in (14) does not have the rejection region. The larger residual will reduce the effectiveness of the algorithm. So we employ the sinusoidal function to replace the score function. The influence function can be written as:
The extremal function (EF) and influence function (IF) of Huber and sinusoidal estimation methods can be expressed in Figure 2.

(a) The influence function (left) and extremal function (right) of Huber estimation methods. (b) The influence function (left) and extremal function (right) of sinusoidal estimation methods.
As shown in Figure 2, the sinusoidal estimation method could effectively cut off the larger residual.
4.3. Removing the Larger Localization Error
After the processing of section IV(B), we can obtain N localization results
If all the propagation conditions are LOS, the conditional probability density function of measurements can be obtained as

The log of the joint conditional probability density function is

The Fisher information matrix

The Cramer-Rao lower bound matrix is defined as the inverse of the Fisher information matrix:

The (1,1) and (2,2) elements of
For jth localization result, the residual test factor can be defined as [25]

Since the true position of the mobile node is unknown, we employ the localization results of N measurements to replace it. We define
4.4. Kalman Prediction
The initialization of the Kalman filter is assumed to be


Since we obtain three estimated localization results, the measurement residual of Kalman filter is

4.5. Fusion Based Kalman Update
In Section 4.4, we obtain three measurement residuals of Kalman filter. In order to use all the useful information, we fuse all the measurement residuals in Kalman update step. The residual covariance is given by

The optimal Kalman gain is employed to minimize the covariance

The fusion factor is defined as
The fused state equation can be obtained as

The updated estimate covariance is calculated as

5. Simulation Results
Simulation results are provided in this section to assess the performance of the proposed algorithm in cluttered environment. The size of the sensing field is 100 m × 100 m. There are five beacon nodes deployed in the field. We assume that the mobile node has the velocity of 1 m/s. The communication range of sensor node is 150 m. The measurement noise is modeled as a white random variable with zero mean and standard deviation

One realization of the tracking and localization performance of the proposed algorithm is shown in Figure 3. The obstacles are randomly deployed. And we do not plot them in Figure 3. The NLOS error is modeled as normal distribution with mean

Mobile node tracking results.
The performance comparison with respect to tracking error in position is shown in Figure 4, and the simulation results suggest that the proposed algorithm performs better than nonfilter, Kalman, and robust Kalman filters. The proposed algorithm achieves higher accuracy since it could remove the larger tracking error and fuse the different results.

Tracking error in position of the trajectory.
For Figures 5–7, the measurement noise is the Gaussian white noise with zero mean and standard deviation 0.5 m. The NLOS error is modeled as normal distribution; that is,

CDF of the Tracking error.

Tracking error versus standard variance of the measurement noise.

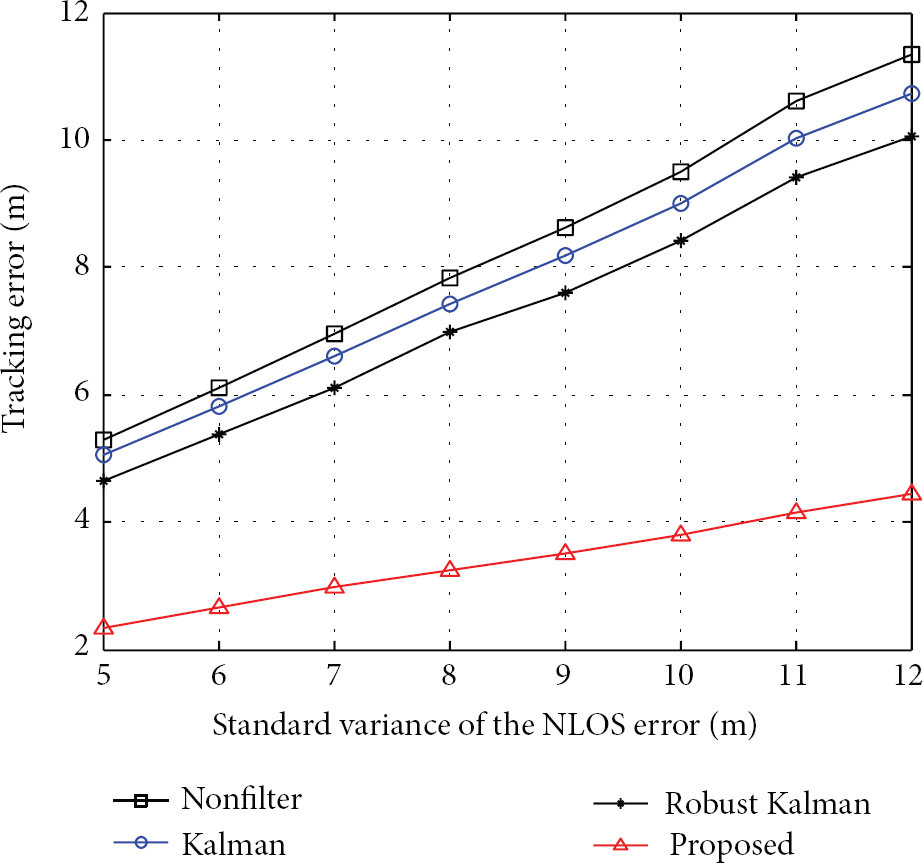
Tracking error versus standard variance of the NLOS error.
Figure 6 shows the impact of the standard variance of measurement noise on the localization accuracy. It can be observed that the tracking error increases as the standard variance of measurement noise increases. In all cases, the tracking error of the proposed method is smaller than other methods. And the proposed method's improved effect decreases as the standard variance of measurement noise increases. The proposed method deteriorates when the standard variance of the measurement increases. Generally, the performance of the proposed method is better than other methods.
Figure 7 shows how the tracking error is affected by the standard variance of the NLOS error for four methods. It can be observed that the tracking error increases with the standard variance of the NLOS error increase. In comparison with nonfilter method, the Kalman and robust Kalman methods improve the localization accuracy. However, the two methods' improved effect is not obvious. The proposed method improved the localization accuracy significantly in comparison with other methods. Therefore, the proposed method deals with large NLOS error more effectively than the other methods.
For Figures 8-9, the measurement noise is the Gaussian white noise with zero mean and standard deviation 0.5 m. The NLOS error obeys exponential distribution, namely,
Tracking error versus the number of beacon nodes.

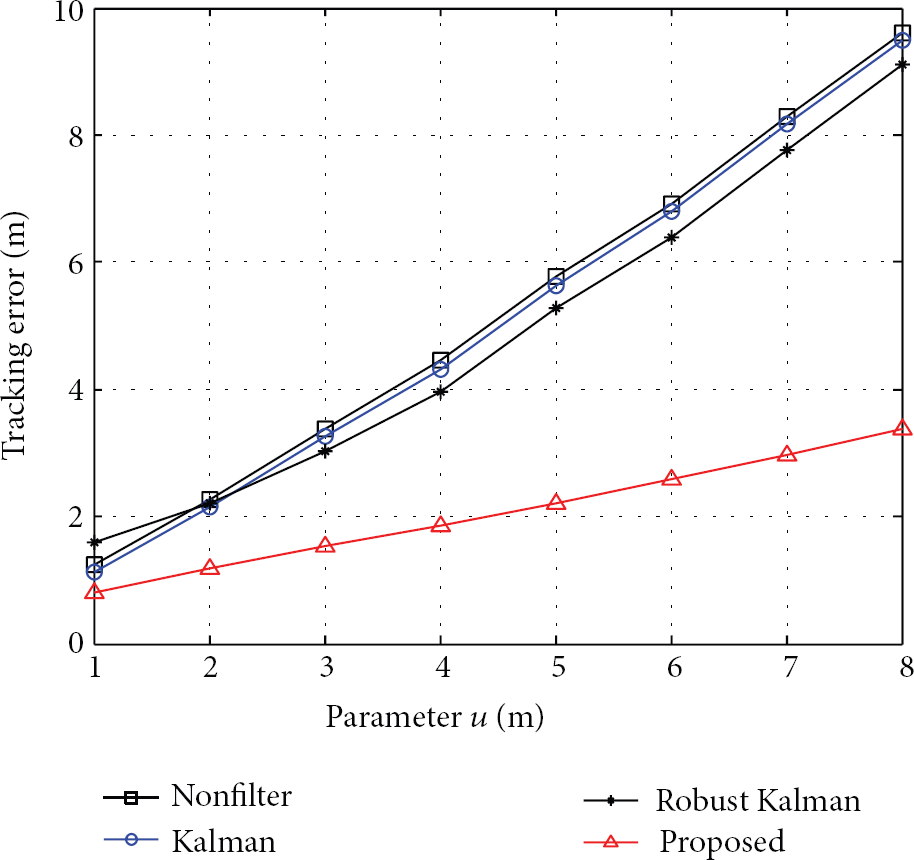
Tracking error versus the parameter u.
As shown in Figure 9, the proposed method slightly outperforms other methods when the parameter u is relatively small. This is because the NLOS effect is small when the parameter u is small; in the other words, the measurement error is the dominant factor. With the increase of the parameter u, the tracking error of other methods increases dramatically, but the tracking error of the proposed method increases slowly. So the proposed method is relatively robust to the parameter u in comparison with other methods.
For Figures 10-11, the NLOS error is modeled as uniform distribution, that is,
CDF of the Tracking error when NLOS error obeys uniform distribution.

CDF of the Tracking error when NLOS error obeys uniform distribution.
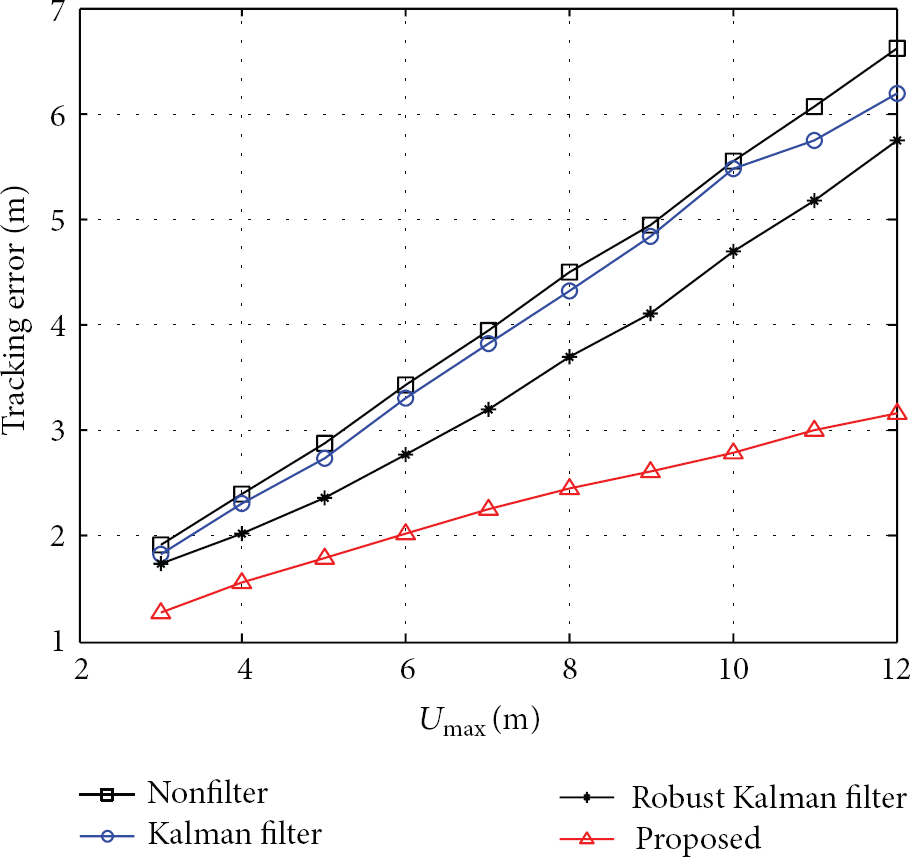
Tracking error versus parameter
Figure 11 depicts the tracking error of the four methods versus different parameters
6. Conclusions
The NLOS propagation is the most common condition in indoor or urban area. In this paper, a novel tracking algorithm is proposed in cluttered environment (LOS and NLOS environments). The proposed method does not need to know the statistical models or prior information on NLOS channel conditions. It also does not require the identification of LOS and NLOS and it is independent of the physical layer used to perform ranging. Simulation results show that the performance of the proposed method significantly outperforms the other three methods.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
This work was supported in part by China National Key Technology R&D Program (2012BAK21B01) and National Natural Science Foundation of China under Grant no. 61304021.