
Abstract
Wireless sensor networks for critical industrial applications are becoming a remarkable technological paradigm. Large-scale adoption of the wireless connectivity in the field of industrial monitoring and process control is mandatorily paired with the development of tools for the prediction of the wireless link quality to mimic network planning procedures similar to conventional wired systems. In industrial sites, the radio signals are prone to blockage due to dense metallic structures. The layout of scattering objects from the existing infrastructure influences the received signal strength observed over the link and thus the quality of service (QoS). This paper surveys the most promising wireless technologies for industrial monitoring and control and proposes a novel channel model specifically tailored to predict the quality of the radio signals in environments affected by highly dense metallic building blockage. The propagation model is based on the diffraction theory, and it makes use of the 3D model of the plant to classify the links based on the number and density of the obstructions surrounding each individual radio device. Accurate link classification opens the way to the optimization of the network deployment to guarantee full end-to-end connectivity with minimal on-site redesign. The link-quality prediction method based on the classification of propagation conditions is validated by experimental measurements in two oil refinery sites using industry standard ISA SP100.11a compliant devices operating at 2.4 GHz.
1. Introduction
The increasing demand of oil and gas supplies frequently requires the design of very large production and processing plants over remote locations with harsh environmental conditions and challenging logistics. The adoption of cabling to fully interconnect machines for process monitoring/control lacks flexibility when in large plants, and it is becoming unfeasible due to the increasing fluctuations of wiring costs to high values. The opportunity to replace cabling by deploying a network of wireless sensors is now becoming of strategic interest for several industrial applications ranging from oil and gas refining, smart factories, transport processes [1], and more recently oil and gas exploration [2].
The status of current technology allows the deployment of low-power, cost-effective network nodes in a battery-powered configuration that substitute the traditional wired devices in a very cost-effective way [3]. The installation of wireless devices may give significant cost savings for a variety of typical plants [4]. Current wireless networks for industrial control and monitoring are based on the IEEE 802.15.4 standard [5] and are mostly considered for monitoring tasks and supervised/regulatory control. The typical locations of wireless devices used for remote control and monitoring of industrial oil and gas refinery sites are characterized by harsh environments where radio signals are prone to blockage and multipath fading due to metallic structures (structural pipe racks, metallic towers and buildings, etc.) that obstruct the direct path [6].
With the widespread use of the wireless technology in industrial environments, the development of virtual (computer aided) network planning software tools is now becoming crucial for accurate system deployment. Inaccuracies during the radio planning design phase will turn into issues during the commissioning phase. As an example, when adding new wired nodes such as gateways and/or access points to improve the coverage, it might be required to reopen excavations along the cable route which is totally unacceptable during the commissioning (or even before the commissioning) phase of the plant. Accurate network planning limits the need to oversize the design of the overall system, which is obviously an extra cost for the contractor. Therefore, it is crucial to develop consistent design guidelines and tools that can guarantee a reasonable accuracy in the prediction of the wireless coverage. Making use of the 3D model of the deploying area (if available) during the design phase is also of utmost importance to achieve this result. An example of a 3D view of two oil refinery sites is illustrated in Figure 1: the wireless end devices (EDs), also referred to as sensors, can be connected by star or mesh mode towards a Gateway device, with the help of intermediate Repeater nodes serving as decode and forward relays. The Gateway device is collecting data and rerouting to a wired network. Network planning is based on the prediction of the pairwise wireless link qualities among all the devices in the distributed network: the link quality is expressed in terms of the strength of the received signal. The prediction can be supported by independent radio measurement campaigns over typical refinery environments and/or by models based on propagation theory and statistical or ray-tracing tools.

(a) Two-hop network architecture (ISA SP100 compliant) for deployment testing; (b) 3D-CAD model of the industrial sites for testing: flare unit (on top) and furnace structure (at bottom).
Conventional empirical channel models [7] cannot fully capture the unique propagation characteristics of the industrial environments; in addition, the ray-tracing-based models [8] turn out to be not practical to process the high number of structures observed in large industrial sites [9]. This motivates the development of accurate site-specific channel models based on a small fraction of measurements taken in the refinery area.
This paper addresses a novel channel model based on the diffraction theory to assess the link quality in radio environments affected by highly dense metallic building blockage. The wireless links are partitioned into mutually exclusive classes: for each class, a separate channel model is proposed to predict the quality of the radio link. The link classification is based on the analysis of the characteristics of the obstructions that impair the wireless propagation. The 3D-CAD model of the refinery site (see Figure 1(b)) is used to identify the structure of the building blockage. Based on link classification, an optimization tool is developed for the prediction of the radio coverage and for wireless connectivity optimization. Although the channel modeling and the classification methodologies proposed in this paper are fairly general and applicable in different scenarios, the model is validated by experimental measurements using industry standard ISA SP100.11a compliant [10] devices operating at 2.4 GHz based on the IEEE 802.15.4-2011 physical layer. The measurement campaigns have been carried out in two sites located in a large-size oil refinery plant. Different practical deployment cases for coverage testing are discussed in environments characterized by blockage due to a high-density of metallic structures.
1.1. Wireless Industrial Networks: Applications and Technologies
A typical industrial environment shows relevant similarities with dense urban microcellular sites characterized by a harsh environment for short-range (10–50 m) radio-frequency propagation with metallic structures [6], changing environmental conditions, nonline of sight (NLOS), and possible colocated wireless applications running over unlicensed spectrum [11]. Industrial networks typically require low-jitter sampling period for monitoring, high-integrity data delivery of critical messages, automatic reconfiguration, and usage of redundancy in case of communication failures. The most representative application cases for wireless technology [12] are commissioning, open-loop maintenance monitoring, closed-loop supervisory, and regulatory remote control. Notice that regulatory control is characterized by stricter reliability and delay requirements compared to supervisory control (some relevant application cases are primary flow and pressure control).
The commercial wireless systems predominantly use the so-called ISM bands at 2.4 GHz. Early experiments for cable replacing in regulatory control applications revealed that the traditional single-hop carrier sense multiple access (CSMA) schemes supported by WiFi (IEEE 802.11) perform poorly when adopted in a factory environment [13]. More recently, wireless extensions to PROFIBUS protocol for critical control have been analyzed by real-time simulations [14]. Today, commercial battery-operated systems are based on the IEEE 802.15.4 standard and enable data to be transmitted at a typical rate of 250 kbit/s, with up to a maximum of 10 dBm output RF power to meet the RF regulations for hazardous environments. The IEEE 802.15.4 physical layer also constitutes the basis for the WirelessHART [15] and ISA100.11a [10] industry standard protocols.
2. Wireless Standards for Industrial Monitoring and Control
Low-power wireless architectures and standards widely adopted in industrial automation are reviewed in this section. This introduction is instrumental to the definition of a design tool for coverage prediction and connectivity optimization. Industrial organizations such as HART and the International Society of Automation (ISA) are currently pushing towards the definition of common specifications for wireless industrial monitoring and process automation based on the IEEE 802.15.4 standard. Below we summarize the characteristics of the most relevant network solutions.
WirelessHART has been ratified by the HART Communication Foundation in 2007 as the first open wireless communication standard designed for process control applications and monitoring. Although WirelessHART adopts the IEEE 802.15.4 standard for the physical layer, the MAC layer is slightly modified as it is based on TDMA (while contention access is not allowed [15]) with guaranteed time slots assigned to the network devices. Frequency hopping spread spectrum access (FHSS) is used as proven technology to provide further improvements in terms of link gain compared to direct sequence spread spectrum (DSSS) option. The adoption of TDMA technology with precisely network-wide time synchronization is the key technology that makes WirelessHART different from other industry standards. Time synchronization is based on the Time Synchronized Mesh Protocol (TSMP). This method allows to synchronize transmitting and receiving node pairs by periodically correcting the relative time offsets misalignments. The offsets corrections are typically transmitted using standard ACK reply messages (with limited extra power consumption). The synchronous TDMA MAC sublayer is built upon the IEEE 802.15.4 physical layer for mesh network communication and defines superframes of 1 sec, fixed timeslot of 10 ms, channel hopping scheme supporting flexible blacklisting options and industry-standard AES-128 block ciphers with related keys.
ISA SP100.11a standard for wireless industrial automation is meant to provide the specifications for reliable and secure wireless operations for monitoring, alerting, open/closed-loop quality control, and predictive monitoring applications [10]. The standard supports the interoperability of multiple radio technologies. The envisioned applications include wireless process control systems (with maximum latencies in the order of 1 sec). The protocol suite, system management, and security specifications are defined for low data-rate wireless connectivity based on IEEE 802.15.4 standard. Network and transport layers are based on UDP with support of IPv6-based solutions (6LoWPAN). Coexistence with other wireless services based on IEEE 802.11x, and IEEE 802.16x standards is also addressed. Although the logical link layer of ISA SP100.11a standard has a similar structure compared to WirelessHART, the standard specifies configurable timeslots with variable durations from 10 ms to 12 ms on a superframe base. Configurable timeslots ease the development of advanced architectures based on duo-casting mechanisms, optimized coexistence, and flexibility. In ISA SP100, a transaction may consist of multiple timeslots; longer transactions can be used to extend the waiting time for multiple consecutive ACKs as required in multicast transmission. The ISA standard supports both slow and fast channel hopping schemes, thus allowing devices with imprecise timing settings to perform resynchronization and neighbor discovery.
The wireless architecture supported by the standard ISA is adopted here as reference for deployment testing. As depicted in Figure 1(a), the network infrastructure consists of the following components.
The end devices (ED) are the input/output field instruments with the minimum set of functions that are necessary to join the network. The EDs take the role of reduced-function devices and typically do not provide any mechanism for relaying messages of other devices. The Repeaters are field EDs specifically configured to serve as relay nodes for other EDs by forming a two-hop (or multihop) mesh network. In typical industrial settings where the real-time responsiveness of the monitoring network is a crucial issue, the number of hops is limited to 2, therefore, the Repeater devices act as ED range extenders. The Gateways act as access points (or sinks) and collect the measurements acquired by the field devices. In practical settings, the Gateways are connected by cables (or by broadband wireless technology) to a common network manager node and thus also act as a translator between the ISA standard and other wired protocols (Foundation Fieldbus, HART, etc.).
3. Channel Modeling
In this section we introduce the channel model as instrumental to the proposed link classification approach. The wireless links without a clear line-of-sight (LOS) path undergo more severe received signal power attenuations than those where the line-of-sight (LOS) path is fully unobstructed. This additional attenuation is almost uncorrelated from the distance between the transmitter and the receiver [16]. The main scatterers/objects that are responsible for the received signal power attenuation are mostly confined within the first and second Fresnel zones as these can be considered to contribute to the main propagating energy in the wavefield [17]. For a wireless link where the direct path between the transmitter and the receiver has length d, the nth Fresnel zone is the region inside an ellipsoid with circular cross-section. The radius of the nth Fresnel zone at distance

We assume that any pair of wireless devices connected with an arbitrary link ℓ are deployed at fixed locations and distance d. The nodes are equipped with radio devices characterized by single omnidirectional antenna transceivers. As for typical scenarios, the Gateway antenna is mounted on an elevated point while flat terrain is assumed.
The propagation model describes the correlation between the size of the (mostly metallic) obstructions located within the Fresnel volumes and the total received signal strength (RSS) experienced along the propagation path. The RSS

In what follows, it is derived a model for the static RSS component
The distance-dependent loss factor


The probability
3.1. Diffraction Model for Prediction of Building Blockage
It is assumed that the additional attenuation σ in (2) is due to propagating wavefronts diffracting around the building blockage consisting of metallic obstacles with different dimensions. Obstacles are acting as perfectly absorbing interfaces.
The diffraction model for the building blockage term σ is based on the Fresnel-Kirchhoff method [19]. The attenuation σ in (2) is obtained as a function of the received electric field E:


Fresnel-Kirchhoff method for modeling the attenuation caused by objects acting as perfectly absorbing 2D interfaces. Any hidden obstacle located in the shadow area caused by larger structural blockage can be neglected as irrelevant for additional loss.
The Fresnel-Kirchhoff approach is used to model the field loss

To gain further insight into the interplay between the obstruction size and the corresponding field loss, in what follows we focus on the example of a single obstacle obstructing the LOS path with rectangular cross-section described by lateral and vertical half-dimensions


Figure 3 compares the diffraction loss for a single object obstructing the LOS path with varying square cross-sections (

Diffraction loss caused by an object with square cross-section (
The general model (6) for a single obstacle can be extended to multiple obstacles by following the Deygout approach [21]. For multiple obstacles, the lateral
4. Wireless Link Classification
The proposed approach for the evaluation of the pairwise link channel qualities is validated by a database of radio measurements taken in different refinery sites to cover the most representative scenarios. Based on the experimental measurements,
Based on the experimental activity, five different link-types are considered (see Figure 4).

Proposed link classification and Fresnel clearance zones.
Type I. LOS (
Type II. Near-LOS (
Type III. Obstructed-LOS (
Type IV. NLOS (
Type IV-S. Severe-NLOS (
5. Radio Planning Optimization
The wireless network deployment problem refers to the determination of the positions of the wireless nodes such that some limiting values of coverage, connectivity, and energy efficiency can be achieved [23]. Wireless device deployment strategies for coverage and connectivity enhancement play a crucial role in providing better quality of service (QoS) to the network. The coverage and the connectivity problems are two fundamental issues that have been widely studied in the literature [24]. In coverage problems, the objective is to deploy wireless sensor devices in strategic ways such that an optimal area coverage is achieved given the requirements of the underlying application [23]. The coverage problem therefore deals with placing a minimum number of nodes so that every measurement point in the sensing field is optimally covered according to application-specific constraints. In industrial monitoring and control applications, the position of the measurement points (sensors or actuators) is constrained by the application; therefore, the coverage optimization is typically carried out based on the structure of the process unit. The focus of this section is thus on connectivity optimization, as this is the most crucial problem for cable replacing in the industrial networking context.
In what follows, we first report on the current state of the research on optimized node placement in wireless sensor networks (Section 5.1). Next, we discuss relevant practical issues and rules that are specifically tailored for network and connectivity optimization in industrial networks (Section 5.2). Finally, we propose an optimization framework tailored for commercially available ISA SP100 two-hop networks that allows the optimal selection of the devices that need to be configured as Repeaters (Section 5.3). The goal is to optimize the number and the position of the infrastructure devices (e.g., the Repeater nodes and/or the Gateways) to guarantee a reliable connection between the measurement points and the control unit with some degree of redundancy [25]. Optimally deployed wireless infrastructure devices guarantee adequate QoS (i.e., outage probability), long network lifetime, and thus reduced costs for network maintenance. The proposed deployment problem is based on the prediction of the RSS for all the pairwise wireless links according to channel modeling and classification outlined in Sections 3 and 4.
5.1. Node Deployment Strategies in Wireless Sensor Networks: A Survey
Extensive work has been reported in the literature relating to wireless sensor and relay node deployment. Deployment of nodes has been considered for targeting connectivity, coverage, node lifetime, and/or QoS. The deployment strategies can be classified into static and dynamic [26] depending on whether the optimization is performed during network setup or during network operation (for node repositioning, see [26]). In static environments where data is periodically collected over preset routes, the problem of optimal node placement for connectivity maximization has been proven to be NP-hard for most of the formulations [27]. Several heuristics and rules have been therefore proposed to find suboptimal solutions based on graph theory. Several approaches to the problem of placing nodes are addressed in [24] to achieve K-connectivity at the network setup time so that K independent paths are identified for every pair of devices. The majority of published work on sensor network deployment limits its focus on simplified and analytically tractable 1D and 2D environments where connectivity can be considered as a primary/secondary objective or as a constraint in the deployment problem [26]. For example, in [28] an outdoor random deployment which targets the connectivity as a primary objective in 2D space is investigated. In [29], a constrained multivariable nonlinear programming problem is analyzed to determine the locations of the sensor nodes to maximize the network lifetime, given a fixed number of sensor nodes with certain coverage and connectivity requirements. A deployment strategy for sensor networks is introduced in [30] to balance the network lifetime and connectivity goals for single- and two-hop networks.
Focusing on large-scale sensor network applications, controlled placement of nodes is often focused on a subset of network devices (e.g., Repeaters or relays) with the goal of designing the network topology to achieve the desired application requirements [31]. The problem of relay placement in two-hop networks is analyzed in [32]: the objective is to place the fewest number of relay nodes so that each sensor node can communicate with at least one relay node, and the network of relay nodes is connected. The goal is to guarantee a reliable communication between each pairs of sensor nodes while the same reasoning can be extended for sensors communicating with a common Gateway node. Recent literature considers the problem of connectivity in massively dense sensor networks [33]. The problem of deploying relay nodes in heterogeneous sensor network scenarios is considered in [34] where sensor and relay nodes possess different transmission ranges (e.g., through the use of different hardware, antennas, or high-power radio modules). The work [35] considers a scenario where sensor devices are equipped with directional antennas: the goal is to find an optimal subset of locations to minimize the total network cost while satisfying the requirements of coverage and connectivity.
The network connectivity problem is mostly considered for 2D planning with the assumption of simple binary communication disk model without looking at site-specific environmental constraints (see also [34–37]). Those approaches are very prone to failure in practical large-scale industrial applications. Some attempts in the literature have been made towards the analysis of deployment and connectivity problems in 3D environments, although the topic is still considered an open issue [38]. The problem of modeling and connectivity optimization in random 3D networks has been recently addressed in [38, 39] where the deployment problem considers the maximization of network connectivity satisfying lifetime constraints.
5.2. Connectivity Optimization in Wireless Industrial Networks
The connectivity optimization for industrial networks can be in general applied to two-hop large-scale networks consisting of Gateways, relays, and sensors, operating in time (and safety) critical applications [36, 37]. Three general practical rules [40] should be followed during system design and configuration. These are summarized below.
Gateway Deployment Planning. The wireless network is first divided from a single process unit into subsections (subnetworks). Within each subsection, the position of the measurement points, and thus the degree of coverage, is designed to satisfy application-dependent requirements. The devices (or end devices, EDs) are deployed to collect data from the nearby measurement points (depending on the monitored process, EDs might consists of a single or multiple measurement points). Each process unit subsection is served by one Gateway (acting as access point for the corresponding devices). The Gateway should be able to allocate resources for two-way communication in real time with the EDs. For small-size projects (as those analyzed in Section 6), a single Gateway is sufficient if the total number of measurement points is less than the capacity C of the Gateway point. Instead, if the project is large with several hundreds of wireless devices and process units, a single network manager should manage multiple Gateways. The required number of Gateways can be defined as a function of the number of measurement points. The following simple calculation can be used in practice to approximate the number of Gateways G needed:

Connectivity Optimization. The use of site-specific radio propagation models (empirical or ray-tracing based) enables the optimization of the connectivity for virtual network planning. A propagation model can be therefore exploited as instrumental to the prediction of the RSS, from which the quality of the radio link (and of the end-to-end connectivity) can be inferred with some degree of accuracy. Prediction errors are typically caused by modeling mismatches (e.g., link classification errors) or unpredictable RSS fluctuations (see Section 3) due to interference over the 2.4 GHz band or fading induced by objects or people moving in the area. The solution to the connectivity and the Gateway deployment problems is generally well understood in the literature (see, e.g., [41]). In the industrial context, three practical rules are defined to ensure a sufficiently high link reliability. The rules are summarized as follows (see also [40]).
Rule 1. Every network with more than 5 devices should have a minimum of 25% of devices within the effective range of the Gateway to ensure mesh connection (typically over a maximum number of Rule 2. Gateway RF antenna should be mounted at least 2 m from the ground level and should not be surrounded by obstacles. Obstacles should lie at distance Rule 3. Every device should have a minimum of 3 neighbors in the effective range. This ensures that when implemented, there will be at least one reliable routing path to the Gateway alternative to direct connection (to guarantee
On-Site Stress Testing. Stress testing of the deployment design is recommended during an on-site survey to verify potential weaknesses highlighted during the virtual network configuration. Stress testing is performed by altering the position of the EDs from the nominal position and thus by measuring the fluctuations of the RSS field.
Although the context may vary slightly depending on the structure of the environment, almost all these basic steps could be applied regardless of the specific commercial system and standard (i.e., WirelessHART or ISA SP100, see Section 2). The first and the second steps are known to be the most critical for high density applications [12].
5.3. Optimal Repeater Configuration for Two-Hop ISA Industrial Networks
The wireless network for industrial environment under consideration conforms with the standard ISA SP100.11a and is characterized by one Gateway collecting data from wireless end devices (EDs). A subset of EDs might serve as Repeater nodes acting as range extenders. The Gateway node is an electrically powered device, serving as access point for the EDs. It manages both wireless and wired interfaces. The Repeaters are configured as EDs with superior functionalities: these allow to connect to the Gateway and simultaneously serve as decode and forward relays for extending the range of the neighboring EDs. Repeater nodes are more expensive than standard EDs since they must be preconfigured to multiplex different sensor data and could be more powerful in terms of processing and transmission capabilities.
The connectivity optimization problem is therefore focused on the Repeater configuration. The candidate sites for the deployment of the EDs and of the Gateway node are assumed to be assigned: each candidate site might host either a Repeater node multiplexing sensor data or a standard ED without relaying functionalities. Optimal placement of the Gateway is not addressed in this paper, although we only assume that Gateway locations satisfy connectivity Rule 2 (see Section 5.2). Optimal deployment for the Gateway might be carried out as illustrated in [41], even if, in practical industrial scenarios, the exact position is subject to stringent environmental constraints.
The optimization approach is based on the selection of the smallest subset of devices that need to be configured as Repeaters to guarantee network connectivity. The optimization jointly minimizes the number of EDs connected to the corresponding Gateway over two hops [32] and guarantees a minimum quality of service for all links, so that the static RSS component
Let the wireless network be represented by a set 𝒮 of N nodes located at known positions within a specific area of the plant. A sequence of messages is continuously transmitted by the EDs towards a common Gateway node labeled as “0” possibly with the help of one intermediate node serving as a Repeater. To comply with the real-time responsiveness constraints typically required by industrial closed-loop control applications, the maximum number of hops to reach the Gateway node is herein limited to 2: the same constraint is also adopted in recent ISA compliant network implementations. Any wireless node

Selection of Candidate Repeaters. First, it is defined the subset


Feasibility Region for the Connectivity Problem. Assuming all nodes
Repeater Configuration. Among the
The iterative algorithm described as follows is used to find a solution to problem (15). Let the ordering of the Repeater subsets be such that
6. Experimental Activity
The experimental validation of network connectivity is based on the link classification and channel modeling described in Sections 3 and 4. The optimization tool used for the optimal selection of the Repeater nodes is described in Section 5. The connectivity design consists of three steps. At first, the candidate positions for the wireless devices are chosen to highlight practical cases of meaningful interest for the deployment of an industrial network. The Gateway node is mounted above ground (according to Rule 2 in Section 5.2) and collects the data received from all the EDs. Second, the pairwise link RSSs are predicted based on channel modeling and classification as outlined in Sections 3 and 4. Finally, the optimal sub-set of the wireless devices that should act as Repeaters is computed based on the connectivity optimization tool illustrated in Section 5.3.
In the proposed experimental set-up, we deployed absolute and gauge pressure transmitters communicating with a Gateway node by star or two-hop mesh topology. Compared to mesh topology, deploying a star topology network should be preferred in practice as it provides better performance in terms of per-link real-time responsiveness that is required for monitoring and control of critical plant parameters. The radio transceivers conform with the ISA SP100.11a protocol [10] with radio transmit power set to
The static RSS component Step 1. The number and size of the objects blocking the direct path between the transmitter and receiver pair (or the corresponding Fresnel volumes) are identified by analyzing the 3D model of the plant. Step 2. The link is classified by exploring the 3D maps of the corresponding sites. Based on the link types identified in Section 4, the size of the obstructions is compared with the Fresnel volumes to identify the corresponding clearance zones Step 3. The static RSS component
The measurements analyzed in the following sections highlight the accuracy of the proposed channel characterization and modeling approach. Tightness of the proposed model is verified by comparing the predicted RSSs with the corresponding measurements obtained during the on-line testing. The model accuracy is found as reasonably high in all the considered settings (with errors below 4 dB for all the considered cases).
6.1. Site Test No. 1: Flare Unit
In this test, the Gateway is mounted in 4 different locations corresponding to different deployment cases as illustrated in the floor plan maps of Figure 5. For deployment case no. 1 the height from the ground of the Gateway is 1.5 m (
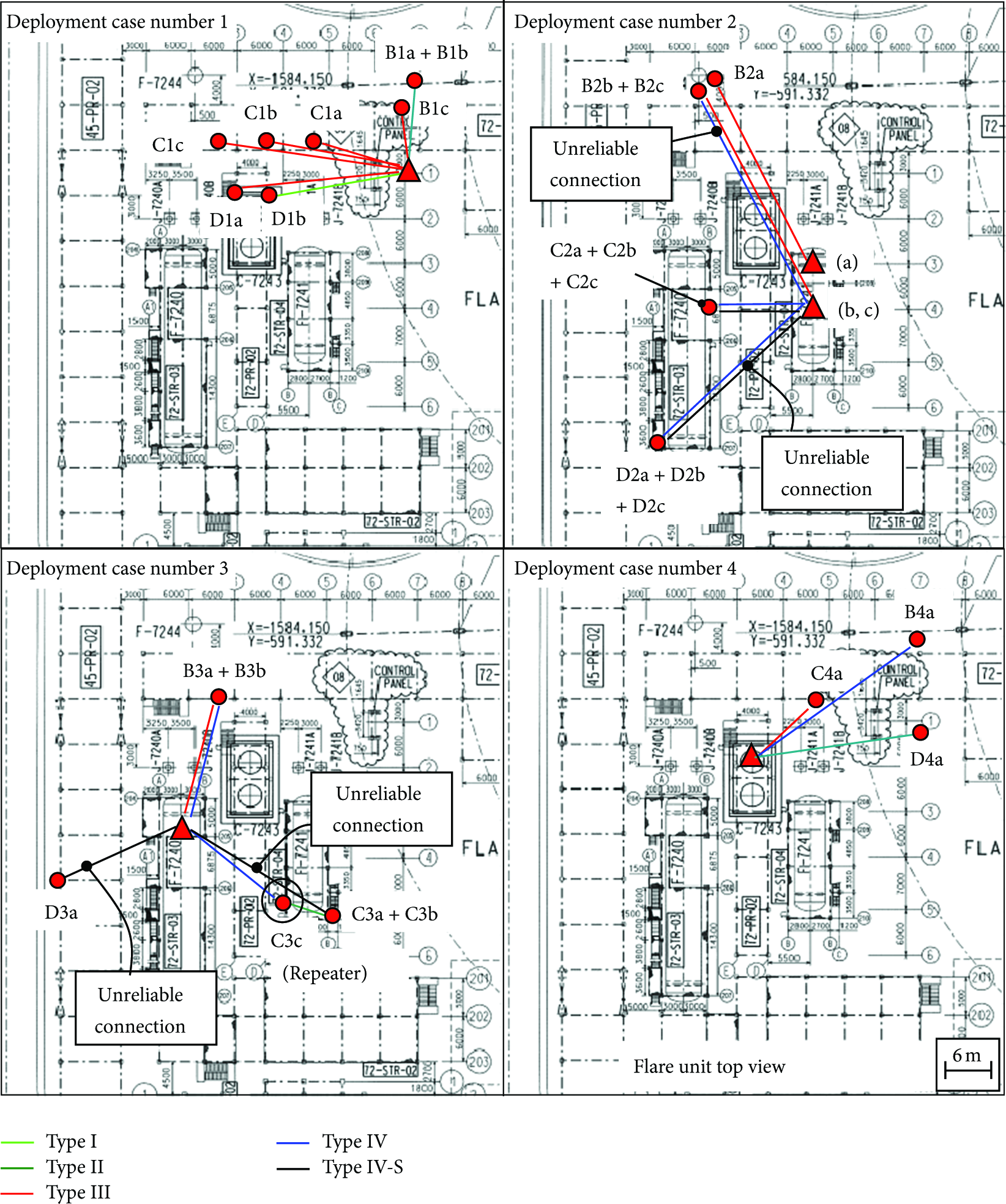
Flare unit test sites and link classification according to the categories defined in Section 4. Links are colored based on the selected link type; unreliable links are also highlighted.

RSS measurements (circle markers) for devices B, C, and D over the flare unit sites (1–4) at ground level. Positions of devices are indicated by lowercase letters and correspond to the maps in Figure 5. Colors identify the link types; the predicted model for each link category is superimposed by solid lines, using the same color code.
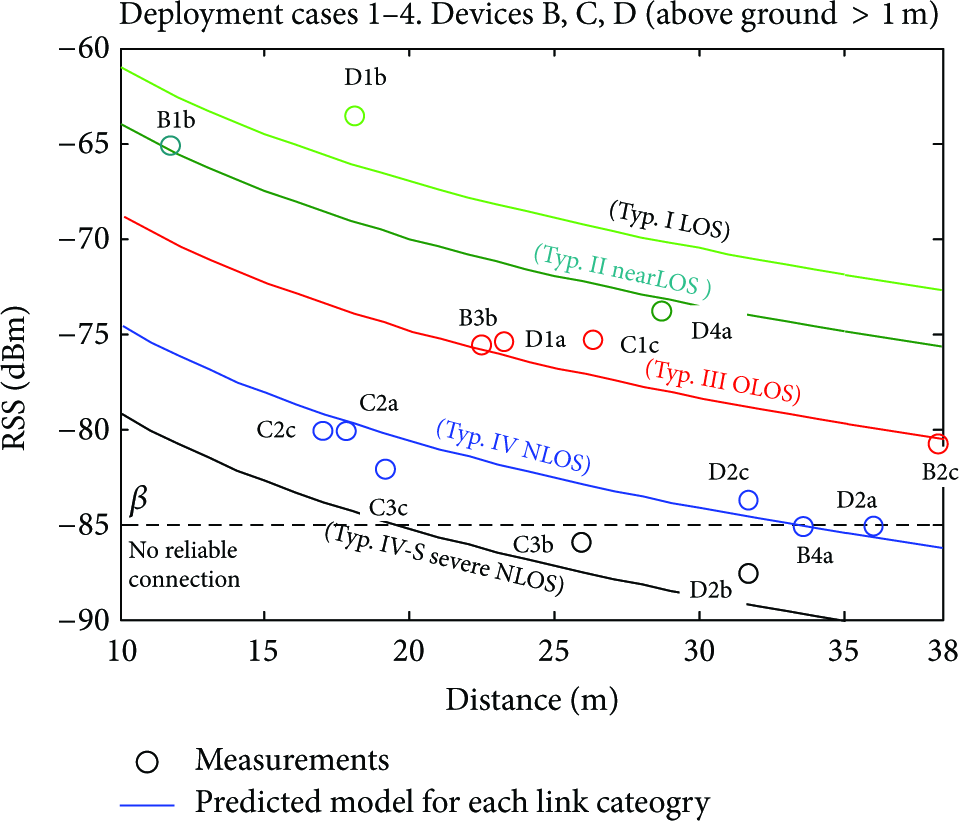
RSS measurements (circle markers) for devices B, C, and D over the flare unit sites (1–4) located at 1 m above ground. Positions of devices are indicated using lowercase letters and correspond to the maps in Figure 5. Colors identify the link types; predicted model is illustrated using the same color code.
The effectiveness of the proposed channel characterization and modeling approach can be appreciated in several settings as highlighted in Figure 8. To focus on a relevant example, in the deployment case 3, the ED transmitters located at positions C3a (ground level) and C3b (1 m height from the ground) are hidden behind a big cylindrical vessel that completely obstruct the 1st Fresnel region. The wireless links connected to the Gateway retain the

Flare unit scenario: relevant deployment example cases.
Figure 8 highlights other relevant deployment cases: the links connecting the Gateway with the EDs at position B4a and C4a are classified as Type IV (
6.2. Site Test No. 2: Furnace Structure
In this test, the Gateway is mounted on the stairway in the south-east of the furnace at 10 m above the ground level. In this scenario, devices C and D are moved over four different floors of the furnace structure according to Figure 9. Device B instead is located at ground level, moved in

Furnace structure test site: top and front view (a) and 3D view (b) of the environment.

RSS measurements (circle markers) and predicted model (solid lines) for the furnace site. Same color code as for Figure 9.
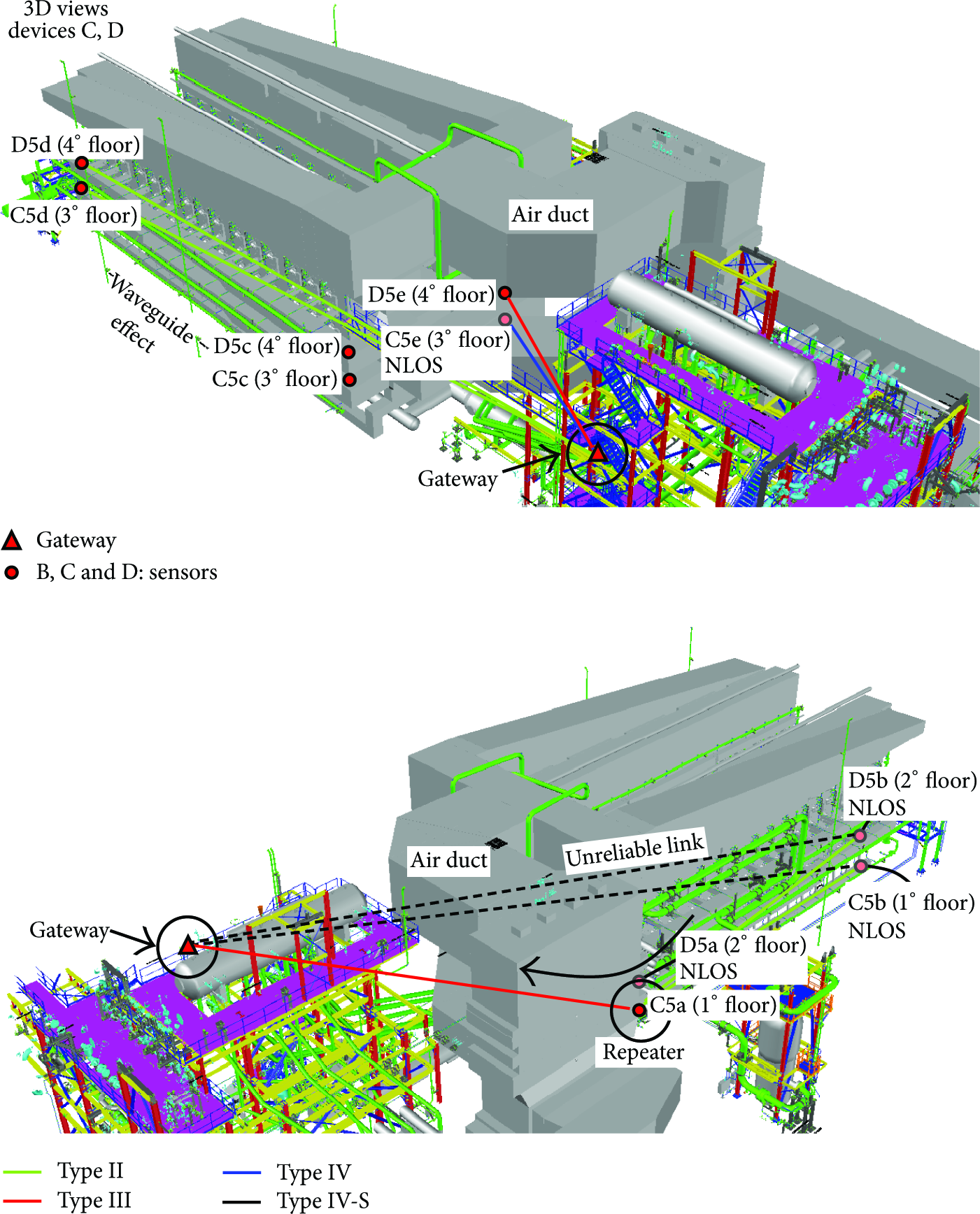
Furnace site scenario: deployment example cases.
6.3. Long-Range Testing
Although the focus of this paper is mostly on short-range networking modeling and optimization of network deployment in industrial environments, a long-range test have been also carried out as depicted in Figure 12 (deployment case 5) with the Gateway located in the same position of case 4 while the device C at ground level has been moved in two sites. The first one is an open area classified as near LOS environment (Type II) on the right side of the flare unit at distance 109 m from the Gateway, the second site was located at distance 132 m from the Gateway in the southern part of the flare unit where the LOS path is obstructed by a building. The path loss

Long-range testing for two sensors: layout (a), measurements (b).
7. Concluding Remarks
Network deployment in industrial settings with dense metallic structures can be based on a simple but effective channel model that makes use of the diffraction theory for 3D environments. The model proves to characterize the wireless propagation in industrial environments with an accuracy that is reasonably high to predict the average quality of the wireless links in different sites. The wireless links are partitioned into mutually exclusive attenuation classes (link types) based on the 3D structure of the building blockage. Each class is characterized by a different amount of obstruction loss; therefore, a separate channel model is proposed to predict the QoS for each link type. The diffraction model is then adopted for virtual planning of two-hop ISA networks: the problem of optimal Repeater configuration of the Repeater devices is addressed to guarantee reliable connectivity between the end devices and the Gateway. The proposed classification approach has been validated by extensive experimental measurements in critical areas within an oil refinery plant characterized by highly dense metallic structure. Industry ISA SP100.11a standard devices operating at 2.4 GHz are adopted. Experimental results from the surveys confirm the effectiveness of the proposed method as it provides a practical tool for virtual network planning with reasonable accuracy that meets the expectations in several industrial settings.
Footnotes
Appendix
Acknowledgment
This work has been performed in the framework of the European Research Project DIWINE (Dense Cooperative Wireless Cloud Network) under FP7 ICT Objective 1.1—The Network of the Future.