
Abstract
The performance of a proposed compact radial basis function was compared with the sigmoid basis function and the gaussian-radial basis function neural networks in 3D wireless sensor routing topology control, in underground mine rescue operation. Optimised errors among other parameters were examined in addition to scalability and time efficiency. To make the routing path efficient in emergency situations, the sensor sequence and deployment as well as transmission range were carefully considered. In times of danger and unsafe situations, data-mule robot with Through The Earth (TTE) radio would be used to carry water, food, equipments, and so forth to miners underground and return with information. Using Matlab, the optimised vectors with high survival rate and fault tolerant, based on rock type, were generated as inputs for the neural networks. Particle swarm optimisation with adaptive mutation was used to train the neurons. Computer simulation results showed that the neural network learning algorithm minimized the error between the neural network output and the desired output such that final error values were either the same as the error goal or less than the error goal. Thus, the proposed algorithm shows high reliability and superior performance.
1. Introduction
There were massive mining incidences in 2002 according to the editorial team of disaster prevention and management report, disclosing an alarming rate of fatalities globally [1]. Mining methods in recent years have been greatly improved due to the provision of electronic monitoring of hazardous gas and provision of ventilation as well as safety lamps. Nonetheless, there are still significant mining risks such as flooding, fall of ground, underground fires, handling and use of cyanide, storage of and exposure to radiation materials, and other airborne pollution that need to be addressed. These have been responsible for a continuing series of environmental and health disasters, which cause great human tragedies and loss of life and undermine social or economic stability and sustainability [2–5]. Mining remains one of the most hazardous environmental occupations worldwide with underground coal and gold mines characterized by high accident rates even in relatively efficient mining operations [6–8]. In view of this, evacuation procedures and underground communication infrastructures are expected to be efficient, effective, and fault tolerant. The critical part of underground communication infrastructure is to reduce the response time and fatalities in emergency or evacuation situations and make human life rescue operations possible [9]. This can be achieved using wireless sensor networks (WSNs) which have the capability of monitoring complex phenomena, underground tunnels, underwater surveillance, high resolution, and harsh environments that are otherwise difficult to access [10–12]. Wireless sensor networks have caused major paradigm shift in the area of communication and computation. It consists of a large number of low-powered sensor nodes, usually equipped with a wireless transceiver, a small microcontroller, an energy power source, and multitype sensors such as temperature, humidity, light, heat, pressure, sound, and motion [13]. The cost and size of these sensors have decreased with high communication accuracy and capabilities; some have energy harvesting features which capture and accumulate by-product energy and store it for later use [14, 15]. These sensors have made it possible for multihop transmission that conforms to underground tunnel structure and provides more scalability for communication system construction [16, 17].
To this end, we model the incident location as a pure random event and calculate the probability that communication chain through particular rock layers to the ground is not broken, and let neuron network memorize the complicated relationship; such that when real accident happens, the neural network resident in the robot is used to predict the probability based on the rock layer he sees instantly. If the result is positive, the robot waits to receive the rescue signal; otherwise, it moves deeper to the next layer and repeats the procedure.
However, large-scale networks such as WSN are usually associated with the challenge of scalability; that is, whether the system described will remain effective and reliable [18] with significant increase in nodes or users, without having to increase related time or hardware requirements such as memory and central processing unit (CPU). To mitigate this challenge, a distributed algorithm is required for parallel programming, which may lead to consensus problems, that is, the inability of the various processes to agree and communicate with one another on a single data value. A number of techniques with application to localization in a distributed, routing-free, and range-free wireless sensor networks have been proposed to solve this problem [19–21]. The topology of a neural network can be recurrent or with feedback contained in the network from the output back to the input and feed-forward where the data flows from the input to the output units with no feedback connections. Artificial neural networks (ANN) or neural networks (NN) are learning algorithm used to minimize the error between the neural network output and desired output [22]. This is important where relationships exist between weights within the hidden and output layers and among weights of more hidden layers. Many researchers have come out with neural network predictive models in both sigmoid and radial basis functions with applications such as nonlinear transformation, extreme learning machine, and predicting accuracy in gene classification [23–25]. Others focus on distributed estimation control fields to mitigate the execution problems, such as multiple redundant manipulators, cooperative task, and task execution [26, 27].
This paper compares the performance of compact radial basis function (CRBF) with the sigmoid basis function (SBF) and the Gaussian radial basis function (GRBF) neural networks on wireless sensor routing topology control based on Particle swarm optimization (PSO) in underground mine rescue operation. A scale-free wireless network topology environment was used. A significant discovery in the field of complex networks has shown that a large number of complex networks including the internet and worldwide network (www) are scale-free and their connectivity distributions are described by the power law of the form
The first section of this paper discusses significant risks in the mining industry which undermine social and economic stability and sustainability goals as well as loss of life and the need for a fault tolerant routing topology in emergency or evacuation situations, noting the challenges of scalability, distributed algorithm, parallel programming and consensus in communication. Section two focuses on methods and our approach, integrating PSO with threshold adaptive mutation in SBF, compact RBF, and gaussian RBF using mean square error for fitness evaluation. Section three deals with the results and discussion with real world application while the last section concludes the paper.
2. Deployment, Communication, and Transmission Reach
2.1. Sensor Deployment
Topological deployment of sensor nodes affects the performance of the routing protocol [30, 31]. The ratio of communication range to sensing range as well as the distance between sensor nodes can affect the network topology. In view of this, the sensor sequence matrix was generated for the sensors to be deployed, such that

The sequence matrix (
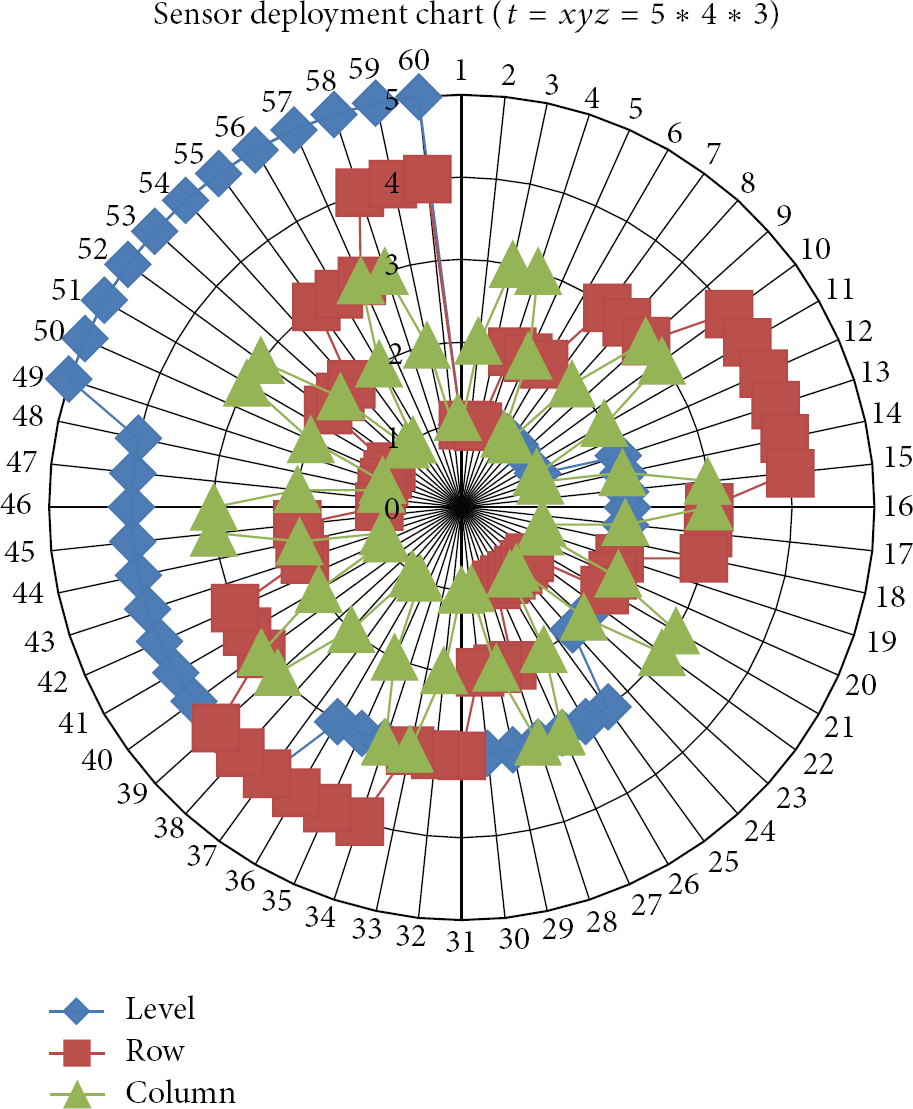
Positions of deployed sensors for the levels, rows, and columns.
2.2. Communication and Transmission Reach
The TTE communication system transmits voice and data through solid earth, rock, and concrete and is suitable for challenging underground environments such as mines, tunnels, and subways. Figures 2(a)–2(c) show the positions of the TTE as laid underground such as vertical-to-surface, horizontal between levels, and horizontal through obstruction, respectively. There were stationary sensor nodes monitoring carbon monooxide, temperature, and so forth as well as mobile sensors (humans and vehicles) distributed uniformly. Both stationary and mobile sensor nodes were connected to either the Access Point (AP) and/or Access Point Heads (AP Heads) based on transmission range requirements. The AP Heads serve as cluster leaders and are located in areas where the rock is relatively soft or has relatively better signal penetration. This will ensure that nodes are able to transmit the information they receive from APs and sensor nodes. The APs are connected to other APs or Through-The-Earth (TTE) in Figure 3.

TTE-two-way voice and data communication.

Topology structure of stationary and mobile sensors deployed.
The TTE is dropped through a drilled hole down 300 metres apart based on the rock type. The depth and rock type determine the required number of TTEs needed (Figure 4). Next the data mule is discharged to carry items such as food, water, and equipments to the miners underground and return with underground information to rescue team (Figure 5).

TTE radios dropped through drilled hole from surface to underground (300) meters.

Data mule sends radios, food, water, and so forth to and from miners and rescue team.
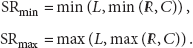
Minimizing the transmission range of wireless sensor networks is vital to the efficient routing of the network. This is because the amount of communication energy that each sensor consumes is highly related to its transmission range [30–32]. The node signal reach (SRnode) is defined as the integration of the change of the minimum and maximum signal reach, taking into consideration the 6 cases of the rock structure β, where β lies between the soft rock (0.7) and the hardest rock (0.9) and is given as

where
The relationship between rock hardness and the signal reach is a complicated nonlinear function, which is related to the skin depth of the rock with alternating currents concentrated in the outer region of a conductor (skin depth) by opposing internal magnetic fields as follows:

for ρ is material conductivity, ω is frequency, and σ is magnetic permeability.
The signal (B-field) is attenuated by cube of distance (d)

Table 1 identifies 6 common rocks found in mines in relation to hardness or softness of each rock.
Common rocks found in typical mines in relation to hardness or softness.

For a connection to be made, the absolute difference between i and j should be less than the node signal reach (SRnode) and is represented as connection:

Multihub wireless networks give rise to distinct challenges such as limited sensing and communication resources utilization [33]. The routing path has the constraints of maximum point to multipoint connection

for
3. Network Fault Tolerant, Hardware, and Software Considerations
3.1. Network Fault Tolerant
Security and management schemes are critical issues in wireless sensor networks as it significantly affects the efficiency of the communication, and many key management schemes had been proposed to mitigate the constraints [33, 34]. As stated earlier, underground mines are characterized with high accident rates which pose great danger to the communication infrastructure. Accidents, such as fire, flooding, cave-ins, or gases can destroy base stations, communication or lighting systems. Battery drain and virus can cause sensors to die invariably creating potential danger to miners underground. Assuming a third failure rate as (

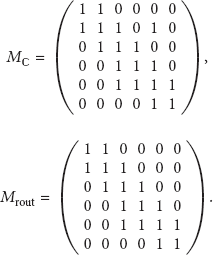
In assessing the damage and generating the failed matrix (
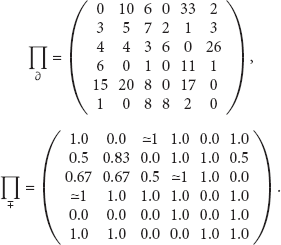
The exact element of figures is used in calculation for
The failure that resulted from the random explosion is presented in a matrix (

The objective is to find a routing path that has the maximum survivability. The matrix elements “1s” and other fractions (0.5, 0.67, and 0.83) refer to the probability that data would be able to transmit to and from its source and destination, respectively. It also shows where a decision needs to be taken; for example, whether the same message should be sent twice or whether two nodes of 0.5 should send a one message. “0” means that the link is dead. Consider

The survivability indicates a number of parallel connections (
3.2. Hardware and Software Considerations
In real rescue situations, software and hardware, including radio frequency identification (RFID) [35], can fail as a result of accidents which can significantly affect the routing path and thwart the efforts of the rescue team. Equally, miners can make other mistakes in the face of accident that can compound the existing problem(s), especially where they find themselves more than 4,000 feet underground, as it is in one of the minefield used for this study. It is therefore imperative to consider such failures in developing rescue models. The RFID failure rate was formulated as

The hardware survival rate was given as

where

For particular mine, 6 common rocks found in typical coal mine are trained together. Data was collected from Wang Xing village, located in Xinzhen City, Henan Province, China.
An optimized vector

where
4. Related Work
Communication in the underground mine setting is relatively new compared with the long history of mining worldwide [34]. Transmitting data wirelessly impact significant benefits to those investigating buildings, thus allowing them to deploy sensors and monitor from a remote location [30, 36]. To effectively gain the needed results in the WSN, researchers have come out with a number of techniques to address the problem of topology control (TC). These include localization of nodes in 3D environment in terms of signal overhead (beacon), localization time, error and path-loss transmission range and total load each node experiences, and energy conservation [31, 37], among others. Power consumption management is very crucial in optimizing the efficiency and minimizing cost in wireless sensor networks [38]. In large mines, for instance, the number of sensors can quickly go up to 10s of 1000s, and the optimization calculation cannot be done on robot over the spot due to battery power constraints. To solve this problem, we employ neural network to do fast calculation on the spot and train the neurons ahead of time for each mine application.
5. System Model
In the generalized neural network models, the operation of a single neuron can be divided into a weighted sum and an output function as indicated in Figure 6.
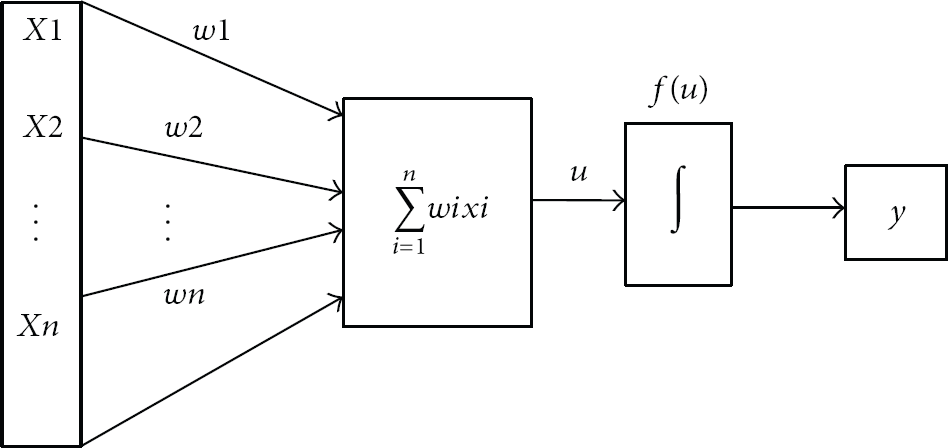
Basic neural network structure.
The weighted sum
For

The weights were given as

There were two thresholds:

Evaluation of the Fitness Function. The architecture of the learning algorithm and the activation functions were included in the neural networks. Neurons are trained to process, store, recognize, and retrieve patterns or database entries to solve combinatorial optimization problems. After encoding the particles, the fitness function was then determined. The goodness of the fit was diagnosed using mean squared error (MSE) as

where n is number of samples, s is the number of neuron at output layer,
Neuron function S-(sigmoid) is
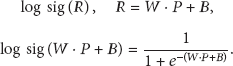
This involves additional square operation and poses computation burden. This paper proposed a compact radial basis function based on the Gaussian radial basis function and Helen's [42] definition expressed as
W is weight matrix, P is input vector, and B is threshold. The resultant RBF for this paper was displayed as
Helen's definition states that a function
6. Particle Swarm Optimization
Particle swarm optimization (PSO), an evolutionary algorithm, is a population-based stochastic optimization technique. The idea was conceived by an American researcher and social psychologist James Kennedy in the 1950s. He is known as an originator and researcher of particle swarm optimization. The theory is inspired by social behavior of bird flocking or fish schooling. The method falls within the category of Swarm intelligence for solving global optimization problems. Literature has shown that the PSO is an effective alternative to established evolutionary algorithms (GA) and retains the conceptual simplicity of the GA, much easier to implement and apply to real world complex problems with discrete, continuous, and nonlinear design parameters [43, 44]. Each particle within the swarm is given an initial random position and an initial speed of propagation. The position of the particle represents a solution to the problem as described in a matrix τ, where M and N represent the number of particles in the simulation and the number of dimensions of the problem, respectively [44, 45]. A random position representing a possible solution to the problem, with an initial associated velocity representing a function of the distance from the particle's current position to the previous position of good fitness value, was given. A velocity matrix

While moving in the search space, particles commit to memory the position of the best solution they have found. At each iteration of the algorithm, each particle moves with a speed that is a weighted sum of three components: the old speed and two other speed components which drive the particle towards the location in the search space, where the particle and neighbor particles, respectively, find the best solutions [46]. The personal best position can be represented by an
All particles move towards the personal and the global best, with τ,

To prevent particles from not converging or converging at local minimum, an adaptive mutation according to threshold was introduced. Particles positions were updated with new value only when the new value is greater than the previous value. 20% of particles of those obtaining lower values were made to mutate for faster convergence; this is indicated by the flowchart in Figure 7 [47, 48].

PSO with adaptive mutation according to threshold.
7. Artificial Neural Networks (ANN)
Artificial neural networks (ANNs) are learning algorithm used to minimize the error between the neural network output and desired output. This is important where relationships exist between weights within the hidden and output layers, and among weights of more hidden layers. The architecture or model, the learning algorithm, and the activation functions are included in neural networks. Assuming the input layer has 4 neurons, output layer 3 neurons, and the hidden layer has 6 neurons, we can evolve other parameters in the feed-forward network to evolve the weight. So the particles would be in a group of weights, and there would be

Topological structure of the neural network training.
8. Results and Discussion
The result of the final survivability vector

The objective was to find the routing path that has the maximum survivability. The elements “1s” and the fractions (0.5, 0.67, and 0.83) refer to the probability that data would be able to transmit to and from its source and destination. In this study transmission was made through the vector elements: if that element or node
Figure 9 shows the optimised error and survival probability for one run as follows:
Scalability of our model in relation to survival probability range, robot location, and rock type.


Optimised error and survival probability for CRBF, SBF, and GRBF.
The CPU time, memory allocated, and memory at peak period were generated by profiling during Matlab simulation and the details recorded after 10 runs for each model. The relationship between the CPU time, memory allocated, and memory at peak usage with respect to CRBF, SBF, and GRBF was expressed in a second-order polynomial given as

where
CPU time and memory efficiency of CRBF, SBF, and GRBF.
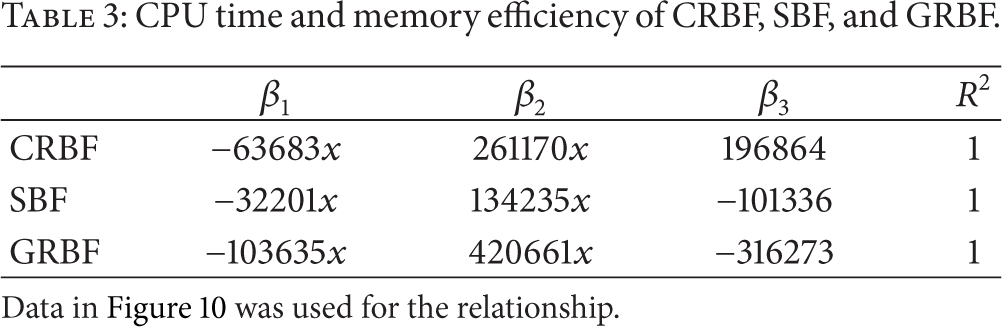
Data in Figure 10 was used for the relationship.

CPU time and memory efficiency.
Other parameters assessed were the mean iteration, standard variance, standard deviation, and the convergence time. 3000 nodes divided into 300 nodes per simulation were performed for CRBF and SBF and GRBF. From Tables 4, 5, and 6, the standard variance for the CRBF of 32.52592 was more consistent with the dataset as compared to 33.14 for the SBF which was more dispersed.
Average performance in various parameters of compact radial basis function (CRBF) with a target error of 0.01.

Average performance of various parameters using sigmoid basis function (SBF) with a target error of 0.01.

Average performance of various parameters using Gaussian radial basis function (GRBF) with a target error of 0.01.
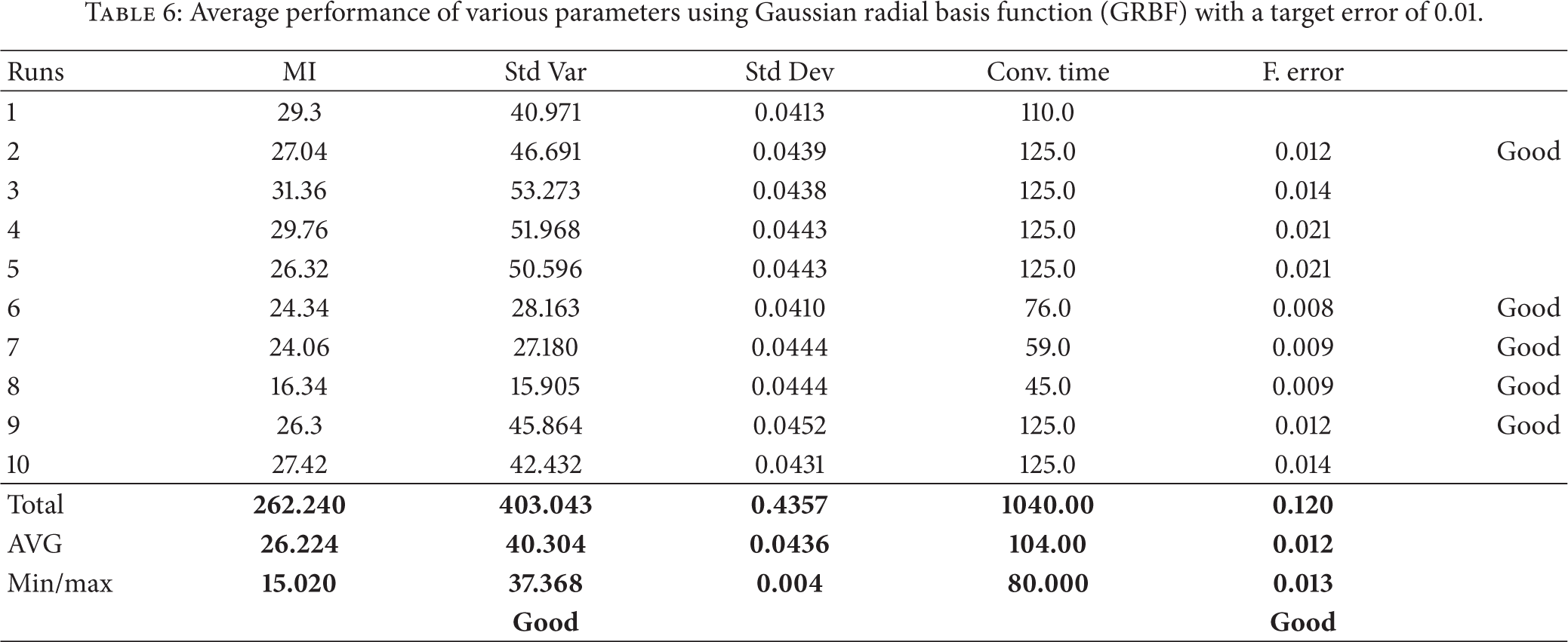
Similarly, the time the particles took to converge in CRBF (92.5 seconds) was shorter than that of SBF (101.9 seconds) and GRBF (104 seconds). On the other hand the mean iteration of 17.528 and the standard deviation of 0.0337 in SBF showed more favorable results than that of CRBF which was 21.872 and 0.04315 and GRBF's mean iteration of 26.224 and standard deviation of 0.0436, respectively. In addition the dataset of CRBF was more consistent than SBF and GRBF, which were more dispersed.
From Tables 4–6, the errors of the models were also accessed. The error goal was set at 0.01. The initial and final errors were analysed against the error goal for the same number of simulation in both cases. 60% of the results for RBF had 0.01 as the target set, with 20% having 0.012 (excess of 0.002) and the rest 0.015 and 0.019. However SBF met the target at 30%, with 20% having 0.012 (excess of 0.002), the remaining 50% obtained in excess of the above (0.005). Additionally the performance of the training in terms of the average optimised error was given as 0.011, 0.016, and 0.013 for CRBF, SBF, and GRBF respectively. This also confirms the CRBF superiority over the SBF and GRBF; the RBF's accurateness over the SBF is also consistent with Hidayat and Ariwahjoedi [49]. From Figure 9 the initial errors of (
The results of the general characteristics of the three models with a range of weight set at
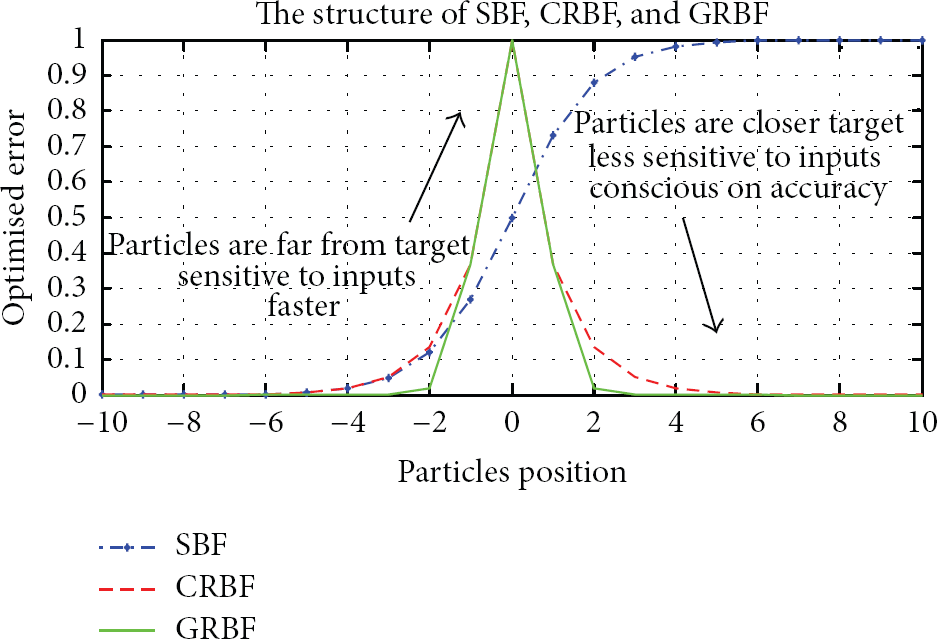
The structure of the CRBF, SBF, and GRBF.
The initial stage of the sigmoid function (SBF) grows relatively exponential as x touches the 0, and then the growth begins to slow down towards saturation and stops at maturity as y goes to 1 (Figure 11). The RBF rises from 0 to 1 and falls as x goes to “10.” A combination of both functions, where x goes close to negative 4 and intersects the Sigmoid curve at (1, 0.3679), improves the accuracy. Other studies such as velocity-field reconstruction in fluid structure [49] showed the flexibility of the SBF but indicated that the RBF gives better accuracy, attributable to the influence of function parameters.
The CRBF and SBF accelerate from the beginning to the peak and decrease as they get closer to the target. However the GRBF lagged a while at
9. Conclusion
In this study a scale-free wireless sensor routing topology control in 3-dimensional environment for an optimized path in underground mine rescue operation was discussed. Optimization was done numerically using Matlab simulation tool which generated the optimum set of routing table. Through particle swarm algorithm the neural network was trained for rescue operation. Results showed that the combined CRBF with PSO provided better results than SBF and PSO or GRBF and PSO in the neural training. The proposed model was relatively better in terms of scalability and CPU time efficiency. We have also shown that the model is fault tolerant and had a maximum survivability routing path for rescue operations. The model could serve as an alternative in rescue operations in the mining sector. We look forward to assess a hybrid of this algorithm with other parameters in future.
Footnotes
Acknowledgments
The authors would like to appreciate the immense contribution of the mining companies where the study was undertaken. The authors are grateful to these individuals for their immeasurable contributions to this work: Fred Attakuma, Patrick Addai, Isaac Owusu Kwankye, Thomas Kwaw Annan, Willet Agongo, Nathaniel Quansah, Francis Owusu Mensah, Clement Owusu-Asamoah, Joseph Adu-Mensah, Shadrack Aidoo, Martin Anokye, F. T. Oduro, Ernest Ekow Abano, and E. Omari-Siaw. This work was supported by the National Natural Science Foundation of China (no. 71271103) and by the Six Talents Peak Foundation of Jiangsu Province.