
Abstract
Cable-driven parallel manipulators are one of the best solutions to achieving large workspace since flexible cables can be easily stored on reels. However, due to the negligible flexural stiffness of cables, long cables will unavoidably vibrate during operation for large workspace applications. In this paper a finite element model for cable-driven parallel manipulators is proposed to mimic small amplitude vibration of cables around their desired position. Output feedback of the cable tension variation at the end of the end-effector is utilized to design the vibration attenuation controller which aims at attenuating the vibration of cables by slightly varying the cable length, thus decreasing its effect on the end-effector. When cable vibration is attenuated, motion controller could be designed for implementing precise large motion to track given trajectories. A numerical example is presented to demonstrate the dynamic model and the control algorithm.
1. Introduction
Cable-driven parallel manipulators (CDPMs) are parallel mechanisms where rigid links are replaced with flexible cables actuated by winches. CDPMs possess several merits, such as large workspace, low inertia, and economical construction and maintenance. Since cables can be easily stored on reels, CDPMs have the great potential to achieve very large workspace. For many applications where extreme workspace is demanded, CDPMs seem to be one of the best solutions. Some representative examples of large workspace applications include cable-driven scaffold system [1], cable-driven camera system [2], and feed supporting system for large radio telescopes [3], as shown in Figure 1.

Some representative applications of large CDPMs.
Many works have been done on CDPMs with the assumption that cables are massless and can be treated as straight lines [4, 5]. This assumption omits the dynamics of the cable itself. For large workspace applications, cables commonly are of relatively big cross-sectional area to withstand heavy payload and are prone to vibration which will result in the vibration of the end-effector. Theoretically, cables should be considered as a distributed mass system to model their vibration.
Dynamic characteristics of cables have been widely researched, though they do not attract enough attention for CDPMs. Terumichi et al. studied the nonstationary vibration of a string with time-varying length attached to a mass-spring system, analytically studying the dynamics of elevators [6]. Wang et al. investigated the vibrations of a geometrically nonlinear cable with time-dependent length [7]. These researches emphasized the influence of cable length variation on their dynamic behaviors. Meunier et al. presented a cable model where cables were modeled as lumped masses connected with spring and damper elements [8]. However, change of cable length was added only to the first element of each cable, which bounded the cable length. For large CDPMs, usually cable length changes relatively slowly and smoothly; therefore, the dynamic effect due to the derivatives of cable length variation with time is negligible, and we can dramatically simplify the dynamic model.
Many control algorithms have also been presented to improve tracking performances of CDPMs. Oh and Agrawal presented a reference governor-based controller with input constraint to guarantee positive cable tension [4]. Yamamoto et al. designed a PD controller for an underconstrained CDPM [9]. Fang et al. studied the cable tension optimization and motion control problems of an overconstrained CDPM [10]. In all these references, cables were considered to be massless and thus there was no vibration suppression problem involved.
Kobayashi and Sakamoto studied the displacement feedback control of a Kirchhoff's nonlinear cable and designed an adaptive boundary control to stabilize it [11]. Li and Hou designed an exponential stabilization controller for an axially moving cable using linear boundary feedback [12]. Zhu et al. presented general control laws for pointwise controllers to dissipate vibratory energies of translating cable with arbitrarily varying length [13]. These works show that vibration attenuation of a cable can be achieved by varying cable length. However, these ideas have not been used for CDPMs. Indeed, to the best of our knowledge, there are few investigations on vibration attenuation for cables in CDPMs where dynamics of cables themselves is considered.
In this paper, dynamic modeling and cable vibration attenuation of CDPMs with a large workspace are addressed. We present a linear cable element where the element length is also considered as a variable to take into consideration the effect of cable length variation. A dynamic finite element model for CDPMs is established to simulate cable dynamics. An output feedback controller aiming at cable vibration attenuation is presented.
The organization of the paper is as follows. Section 2 presents a simple cable element and derives the finite element model for CDPMs. An output feedback controller is designed in Section 3, which can attenuate cable vibration during trajectory following. Section 4 presents a numerical example to demonstrate the method. And some remarking conclusions are summarized in Section 5.
2. Dynamic Finite Element Model for CDPMs
To capture the dynamic behavior of long cables, the finite element method is employed here and each cable is divided into multiple elements. The commonly used linear element is modified in a natural way to take into consideration the cable length variation. Illustrated in Figure 2 is a tensioned linear element with axial stiffness EA and unstressed length l, which is a one-dimensional element. The nodal position vectors of the element are denoted by

where L = [(
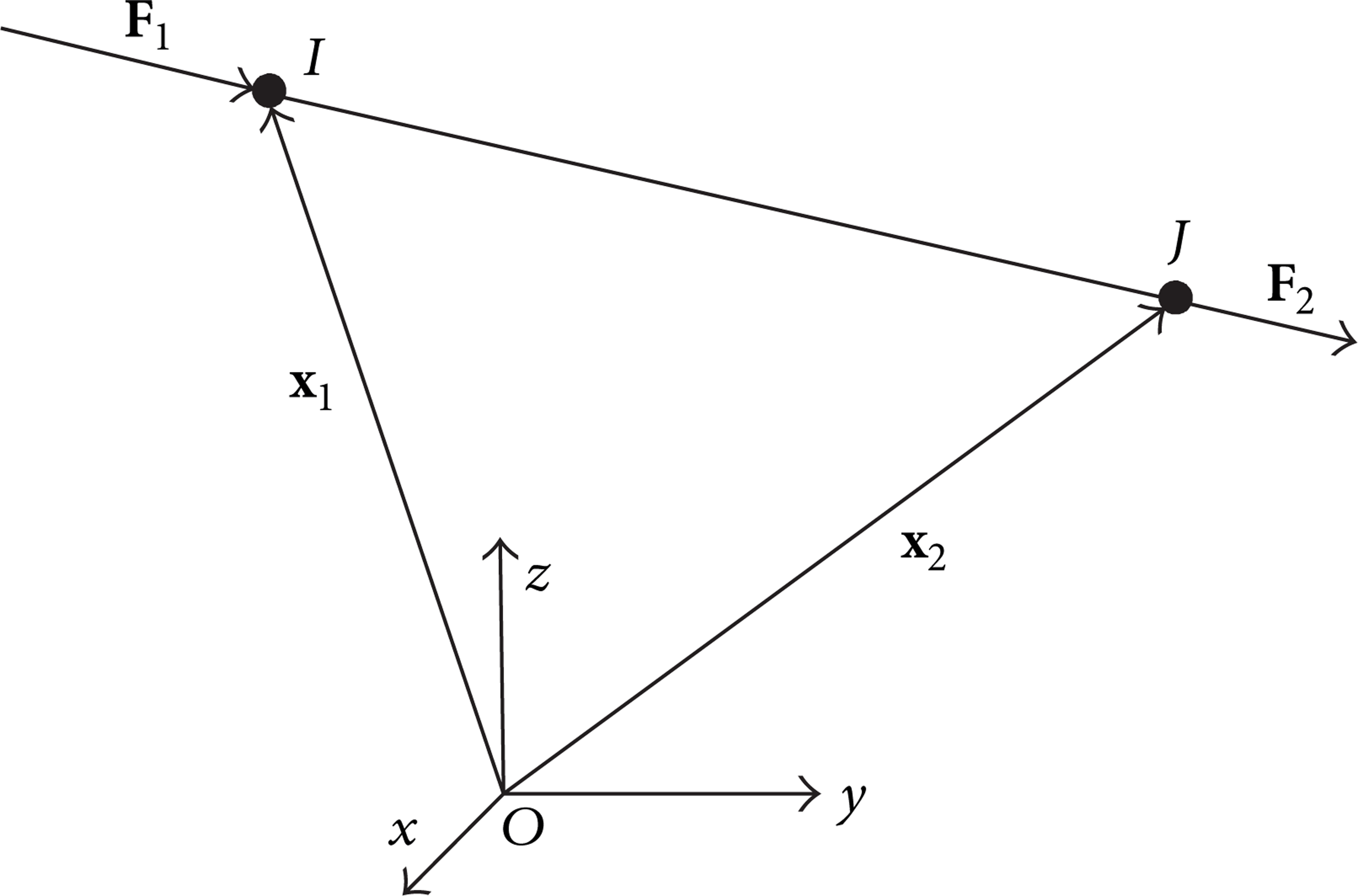
Cable element in equilibrium state.
By neglecting higher-order terms, we can obtain the first-order Taylor expansion of (1) as

where

Here, the element length is also treated as a variable, facilitating the analysis of cable length variation. We can note from (3) that the first term corresponds to the axial stiffness of the element in global frame and the second term to the geometric stiffness due to the element tension.
Noting Δ

where
Thus, the incremental nodal force Δ
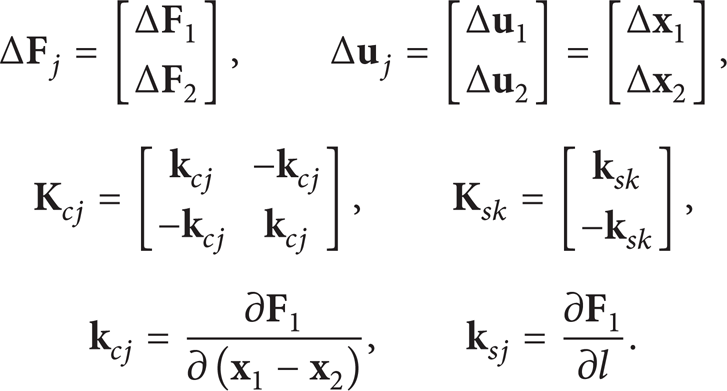
In this paper, we focus on the cable dynamic effect; therefore, a typical translational CDPM where the end-effector is a point mass driven by N long flexible cables is considered. All cables are divided into the same number of elements, say n elements, as shown in Figure 3. This will facilitate the dynamic simulation. For each cable, the first node is fixed at the anchor point and the last node is attached on the end-effector with the unstressed element length, l(t) = L(t)/n, where L(t) is time-varying length of the cable.
Spatial discretization of a cable in the CDPM.
Using a standard assembly procedure of the finite element method, we can obtain the dynamic model of the ith (i = 1, 2, …, N) cable as follows:

where Δ
During operation of CDPMs, small amplitude vibration of cables unavoidably occurs and the actual motion of manipulators can be viewed as the superposition of a desired large motion and a small amplitude vibration. From (7) we can see that if the cable length is not actively controlled, namely, Δl i = 0, a free vibration of cables exists. Here, the cable damping is not considered. Since in practice cable damping is very small, this free vibration is hard to be efficiently suppressed. Active control of the cable length provides a way to attenuate the vibration.
3. Vibration Attenuation Control of CDPMs
The state-space representation of the cable dynamics can be obtained from (7) as

where

The variation of cable force exerted on the end-effector is determined by the element linked to it, which is chosen as the output and is given by (5) as

where

where
We assume that the cable force exerted on the end-effector can be measured and an output feedback control is used with the form

Combining (10), (11), and (13), we obtain the input as

Thus, the dynamics of the closed-loop system is of the form

where

Free vibration of cables can be attenuated by properly choosing the feedback gain matrix. The diagram of the cable vibration attenuation controller is shown in Figure 4.

Controller for cable vibration attenuation.
When cable vibration is attenuated, a trajectory following controller can be added to the system to guarantee a desired large motion. In this way, two parallel controllers could be used to control the motion of CDPMs, simultaneously attenuating cable vibration and precisely following given trajectories, as shown in Figure 5.

Control strategy for vibration attenuation and trajectory following.
4. Numerical Example
The dynamic modeling and vibration attenuation of a typical 4-3 CDPM with distributed mass cables are simulated, where 4 long cables drive a point end-effector in its workspace as shown in Figure 6. The dimensions are a = 40 m, b = 30 m, and h = 10 m. The mass of the end-effector is 20.0 kg. All cables are of the same parameters: sectional area A = 5.37 mm2, mass per unit length ρ = 4.19 × 10−2 kg/m, and equivalent modulus of elasticity E = 160.0 GPa. The end point is asked to track the following horizontal circular trajectory:

where R = 1.0 m and T = 10 s.

A typical CDPM for large workspace application.
The unstressed cable length variation for the given trajectory is shown in Figure 7, which is obtained by assuming that cables are massless with elasticity. The corresponding cable tension is shown in Figure 8. The cable length and cable tension vary continuously and smoothly.
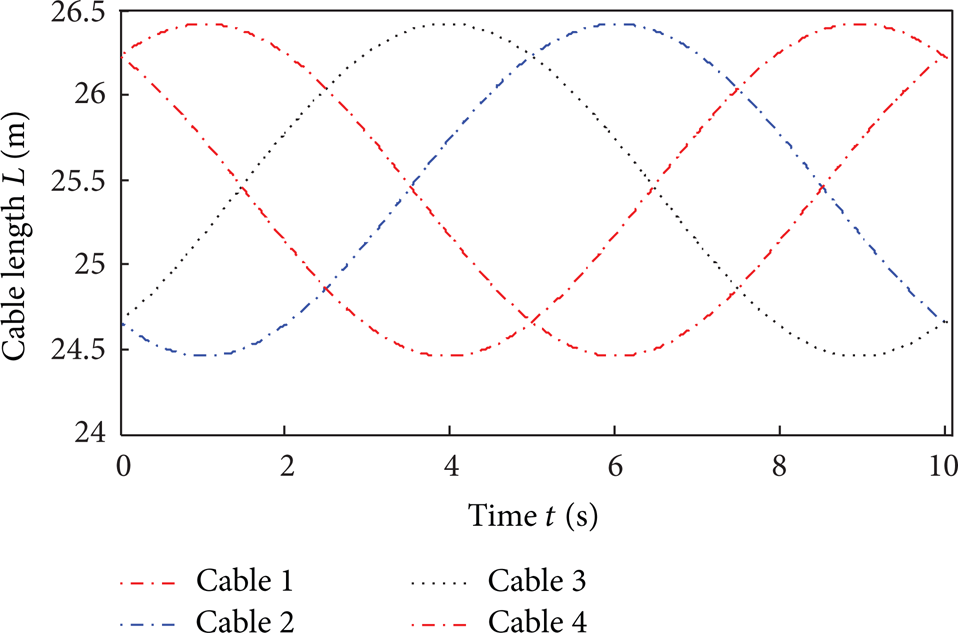
Cable length variation for the trajectory.

Cable tension variation for the trajectory.
Since cable length varies during the operation of the CDPM, cable dynamics is a time-varying system, depending on the current configuration of the manipulator. Therefore, the gain matrix

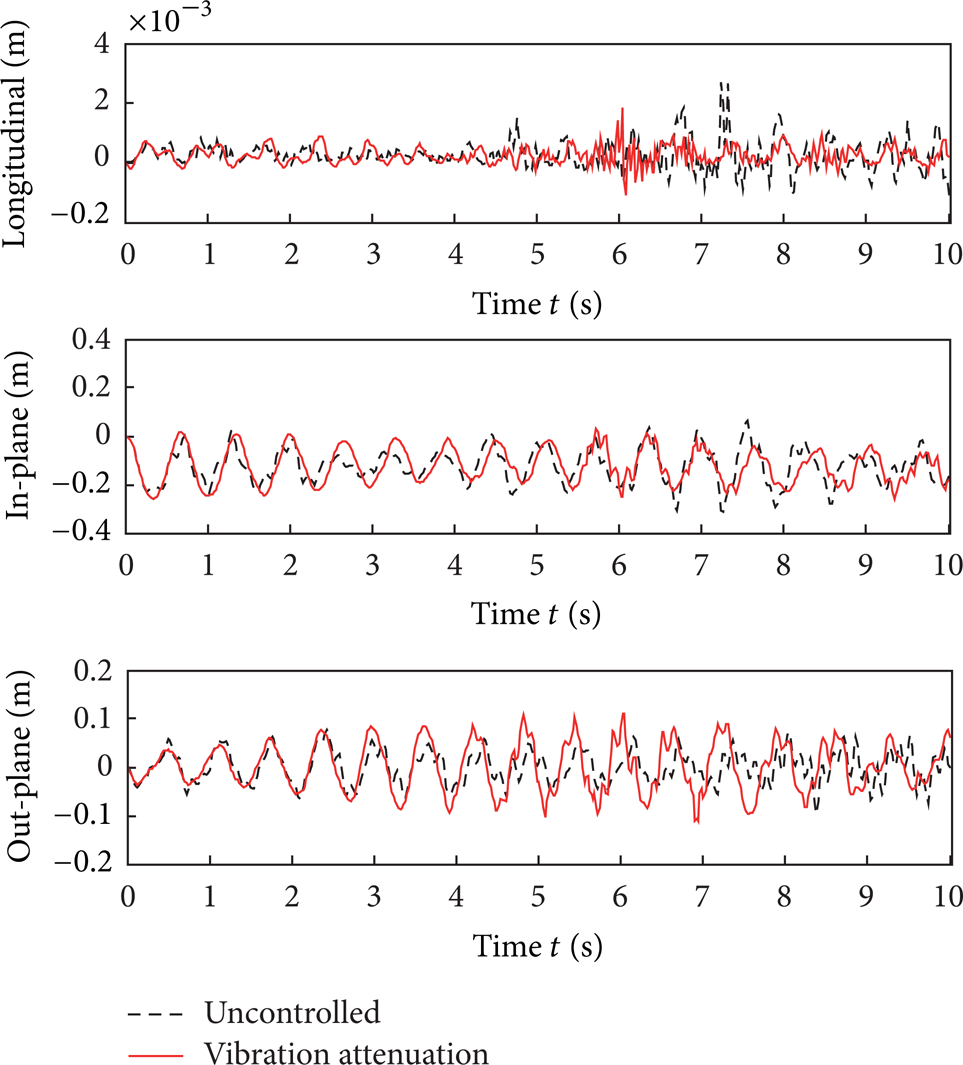
The proposed finite element model is utilized to analyze the dynamic behavior of cables and its effect on the motion of the end-effector. All cables are divided into 5 elements. Simulation results show that the end-effector moves along and vibrates around its desired trajectory. The vibration of the end-effector with respect to its desired position without and with vibration attenuation control is shown in Figure 9. The maximal amplitudes of the vibration in x, y, and z axes without control are 6.24 mm, 10.5 mm, and 36.9 mm, respectively, which are reduced to 4.4 mm, 4.7 mm, and 31.4 mm, respectively, with the vibration attenuation controller. The average vibration amplitudes decrease by 29.6%, 54.6%, and 14.9% in x, y, and z axes, respectively.

Vibration of the end-effector without and with vibration attenuation.
The divergences in the velocity of the end-effector with respect to its desired velocity without and with vibration attenuation control are shown in Figure 10. We can see that there is no decrease in the divergence in velocity of the end-effector; in fact, the velocity divergence increases. This can be explained by an observation of Figure 9 which shows that when the vibration controller is used, the amplitude of the vibration decreases; however, its frequency increases.

Divergence in velocity of the end-effector without and with vibration attenuation.
Shown in Figure 11 are vibrations of the midpoint of cable 1 in the local cable frame with respect to its desired position which is assumed as the midpoint between the cable ends. There is no reduction in the vibration of the cable when the vibration attenuation controller is used.
Vibration of the midpoint of cable 1.
5. Conclusion
This paper addresses dynamic modeling and vibration attenuation of CDPMs with long cables where the cable dynamic behavior should be considered. The finite element method is used to model distributed mass cables. A simple controller is designed to attenuate cable vibration where cable tension is feedbacked since it is easy to measure. A numerical example is given to demonstrate the method, from which we can draw the following conclusions.
The attenuation of the vibration amplitude of the end-effector does not necessarily mean the attenuation of the vibration in its velocity. The controller may lead to a small amplitude but high frequency vibration of the end-effector.
The attenuation of the vibration of the end-effector does not necessarily mean the attenuation of cable vibration. So, there is a situation that the end-effector can smoothly follow given trajectories while cables vibrate.
Considering the fact that there are much more degrees of freedom than the number of actuators, suppressing cable vibration is a hard work.
In this paper, only the cable attenuation was investigated; when a motion controller is added to the system a better performance will be achieved hopefully. For this control algorithm, developing an efficient way to separate large motion and corresponding vibration displacement of the system also should be considered and needs further theoretical and experimental research.
Footnotes
Acknowledgment
The authors would like to thank the National Natural Sciences Foundation of China for its financial support under Grants 51105290 and 51175397.