
Abstract
We propose an electronic nose system that can perform real time direction estimation of an odor source and multiple odors recognition based on a stereo sensor array for extensive use in mobile environments. The proposed system consists of the following: (1) a method to obtain odor signals using a twin-sensor array, which consists of 16-channel metal oxide semiconductor sensors; (2) a method to estimate the direction of an odor source by analyzing the signal amplitude of each channel in the stereo sensor array; and (3) a method to recognize two odors simultaneously using a hierarchical elimination method. We determine the accuracy of the direction estimation of odor sources and the odor recognition rate in order to verify the performance of the multiple odors recognition method. As a result, we confirm the high estimation performance of the model for the front three-way directions, with a recognition rate of approximately two odors simultaneously.
1. Introduction
Recent studies on cognitive or recognition ability have been based on the viewpoint of human-computer interaction (HCI) by five-sense information processing, which includes vision, hearing, tactile, palate, and olfaction. Related research requires a convergence of mechanical, electronic, and chemical engineering research [1].
Two human abilities are related to olfaction: smelling ability and odor source localization. In the existing research on smelling ability, either pattern recognition or correlation analysis among sensors has been used to recognize various odors. The pattern recognition-based method is based on the formulaic form of an odor signal [2, 3] and extracts an odor pattern from the odor signal. The traditional method in pattern recognition was considered to be a feature extraction method [4]. The correlation analysis-based method identifies the mutual relationships between odor substances and sensors, and it uses these relationships to recognize the odor [5, 6]. This approach calculates the correlation coefficients among the signals of each sensor in the sensor array and then determines the optimal sensor for the target odor. Both of the aforementioned approaches can recognize one odor at a time. In order to recognize two odors at a time, we must consider an additional feature separation method. The current research focuses on odor source localization with a singular chemical sensor. A single sensor detects a single smell of a chemical substance. Because an odor is composed of various chemical substances, an electronic nose that uses only a singular chemical sensor would have difficulties finding an odor that is generated by a mix of various chemical substances [7, 8]. Therefore, the existing electronic nose cannot be used for extensive use in mobile environments.
In this paper, we propose a mobile olfaction system that is composed of multiple odor recognition and odor source direction estimation abilities for extensive use in mobile environments. The proposed system recognizes two odors at a time and estimates the direction of an odor source using signal amplitude. The proposed system is based on a 16-channel twin-sensor array, similar to human capabilities. Namely, the proposed odor processing system consists of 32 channels. Also, we suggest a recognition algorithm capable of detecting two odors simultaneously using a hierarchical elimination method. This paper contributes to various study and industry fields that utilize a roll-around humanoid robot with mechanical olfaction.
This paper is organized as follows. In Section 2, we describe the previous studies concerning electronic noses in various study fields. In Section 3, we propose an olfaction system using a twin MOS sensor array. In Section 4, we show the recognition rate of two odors simultaneously and the estimation results of the direction of an odor source. In Section 5, we summarize the results of this study and suggest topics for future work.
2. Related Works
An electronic nose consists of mechanical and logical parts. From a mechanical point of view for developing an electronic nose, an electronic nose that has been developed in order to study mechanical olfaction uses a sensor array containing multiple sensors which can sense odorant molecules. The types of odor sensors that have been considered in previous research include Conducting Polymer (CP), Surface Acoustic Wave (SAW), Quartz Crystal Microbalance (QCM), and Optical and Metal Oxide Semiconductor (MOS) sensors [2]. The type of sensor used varies according to the types of target smell, for example, food monitoring, bioprocesses, medical diagnostics, and beverage manufacturing [9, 10].
From a logical point of view for developing an electronic nose, Linear Discrimination Analysis (LDA), Independent Component Analysis (ICA), Hierarchical Cluster Analysis (HCA), Principal Component Analysis (PCA), Artificial Neural Network (ANN), Support Vector Machine (SVM), statistical Analysis of Variance (ANOVA), and nonhierarchical clustering algorithms such as k-means have been used as feature extraction and classification methods for odor recognition [11–17]. A feature extraction stage of an odor by these algorithms uses the representative components of the input odor. The features are used as a reference model when other odors are recognized.
Recently, in a study related to MOS sensor, Lei Zhang et al. have developed an electronic nose for concentration estimation of formaldehyde [15]. It uses ANN ensemble and self-calibration model for implementation of logical part, and they used four MOS sensors and two auxiliary sensors for the temperature and humidity. A 12-bit analog-digital converter is used as interface between the Field Programmable Gate Array (FPGA) processor and the sensors. FPGA can be used for data collection, storage and processing. The logical part of this nose system is connected to a PC. Brudzewski et al. have proposed a method for recognizing the smell of coffee using a differential electronic nose containing an MOS sensor array [16]. Their study showed that a differential electronic nose, applying the special procedure of signal processing, is of sufficient sensitivity for the recognition of the forgery of coffee and performs much better than the classical electronic nose. It uses 12 MOS sensors of Figaro serious, temperature sensor, and humidity sensor. They also developed a feature extraction method using PCA based on an odor signal database and showed recognition and classification using SVM. Wang et al. also developed an electronic nose using PCA and SVM to predict the total viable counts of odor in chilled pork [17]. In particular, they considered the alpha MOS sensor array system of France and three sensor chambers for controlling the temperature, and an 18-MOS sensor was used.
Furthermore, a recent study considered temperature and humidity based on a sensor array using many MOS sensors. The concept of a chamber was introduced, and an odor recognition method for various industry fields has been proposed. However, studies on the logical part and improvement of electronic ability for developing an electronic nose are fairly scarce because the electronic nose has only been examined in the chemistry and mechanical engineering study area. We also studied an electronic nose using an MOS sensor array. Furthermore, in our previous works, we proposed an optimal MOS sensor decision method [4] and a floral scent recognition method using ICA with a correlation coefficient and multiple odor detection [5]. In particular, reference [5] was presented as an interim result for this study. In this current paper, we will present olfaction using a state-of-the-art electronic nose by improving the logical part as discussed in the following section.
3. Proposed Olfaction System Using Stereo Sensor Array
The proposed olfaction system has multiple odor recognition and odor source localization abilities based on a stereo sensor array that is similar to the human olfactory organ. While in previous works the electronic nose was based on a physical theory, the proposed olfaction system is an intelligent electronic nose that emulates human ability. The most significant difference between previous works and this study is that here we propose a way to improve the logical processing ability of the odor signal by using a stereo sensor array similarly to the human olfactory system.
The signal form of multiple odors is composed of a combination of single odor signals, as shown in Figure 1(a). Figure 1(b) shows the waveforms of a signal of multiple odors. The proposed system recognizes two odors simultaneously from an input signal. A sensor shows a formulaic pattern for an odor. When an odor is inputted, the signal of each sensor shows a pattern [11]. The signal of each sensor increases rapidly according to the input odor and then decreases slowly until the odor has disappeared. Studies on mechanical odors using such signals are classified into one of two categories. The first study category is odor recognition, in which the first step involves detecting the odor activity from the entire set of sensor signals. The sample range of odor activity is roughly 200 to 900, in which case the features of an odor activity can be extracted using pattern recognition.
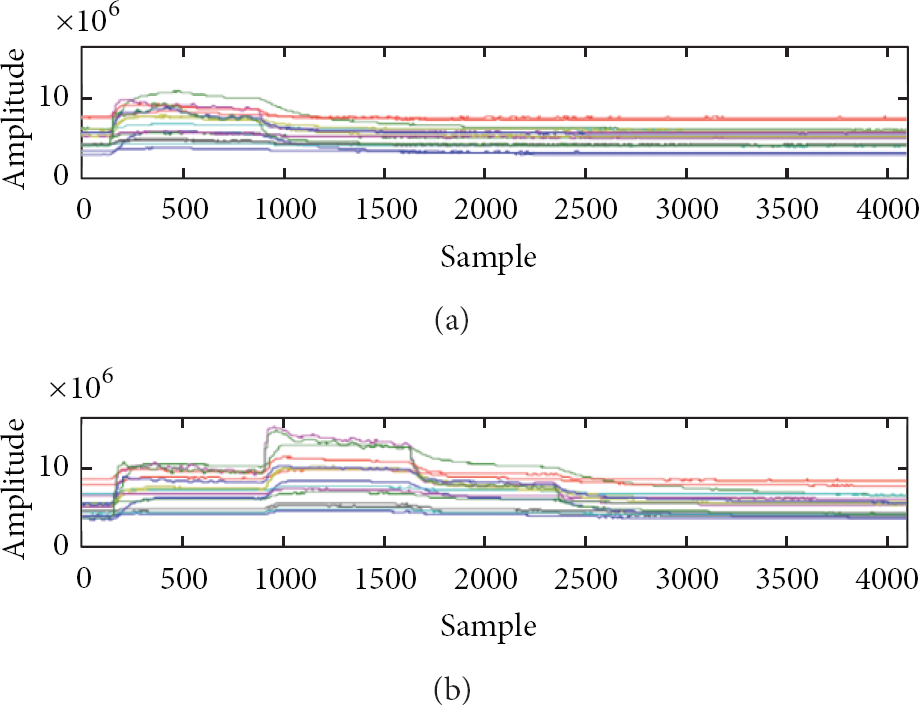
Odor signal waveforms.
Figure 2 shows a block diagram of the proposed multiple odors recognition method. The system consists of the acquisition of odor data, the detection of odor activity, the extraction of features, and the recognition of odors. Odor data is acquired through a 16-channel sensor array we developed, and the odor is then converted into odor data. In the proposed system, the odor is detected using entropy from the measured odor signals, based on the detection of the inflection points of the odor. Features are extracted using a PCA to extract the feature vector of an odor pattern. Subsequently, the odor is recognized using a hierarchical elimination method to select the recognition candidate and by using the Euclidean distance.
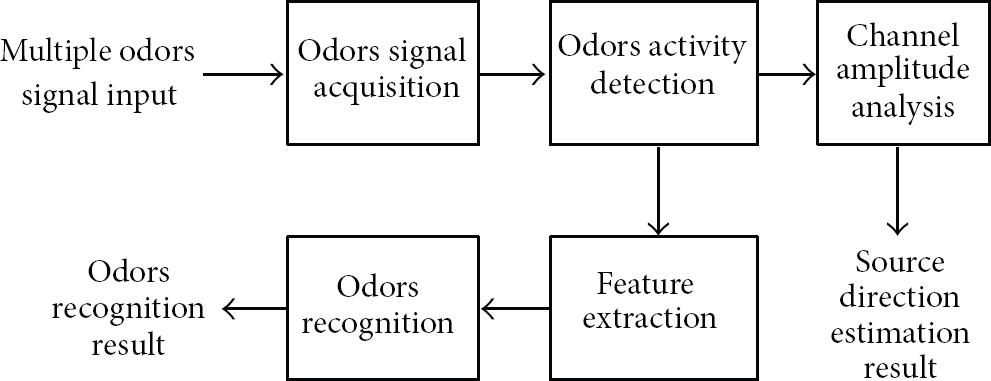
Block diagram of proposed olfaction system.
An odor signal can be obtained using several different types of sensors for dynamically changing odors in real time. In order to obtain such data, a structure was designed and manufactured that enables the surrounding air to pass through it in real time by attaching fans in the front and back of a chamber. This structure is then used to inhale and discharge the surrounding air into and out of the chamber. The air contains chemicals that constitute a specific odor. The structure of an odor data acquisition device is shown in Figure 3, and an actual image of an odor data acquisition device is shown in Figure 4. As seen in Figure 4, the proposed stereo sensor array was developed based on a socket to easily change a sensor according to the type of target odor.
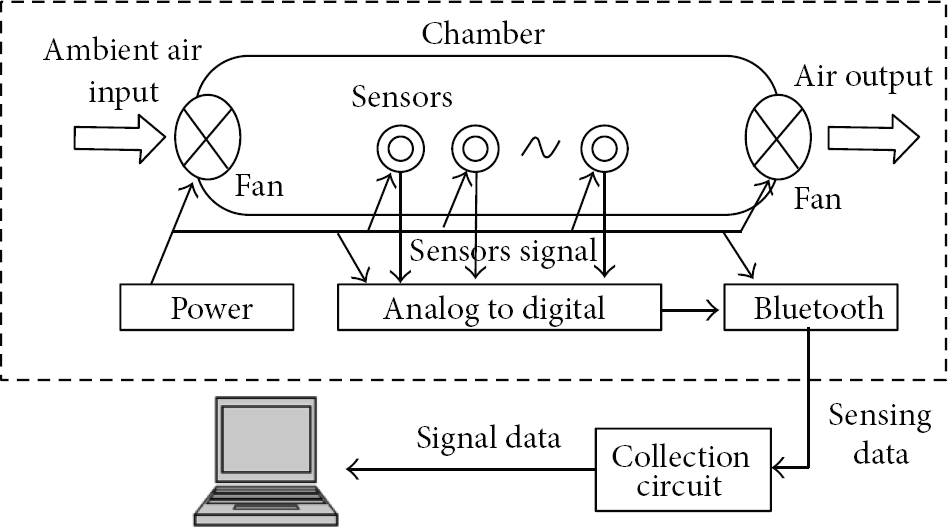
Structure of a sensor array.

Actual image of a stereo sensor array for odor data acquisition.
The odor was detected using entropy in IEEE 802.15 bluetooth-enabled mobile devices (hand-held PC, smartphone, tablet PC, etc.). The odor signals detection module in the logical part of the proposed olfaction system can be used to determine the inflection point and to monitor the abrupt changes in the sensor amplitude during the odor input and removal [4, 11]. In order to detect the inflection point of multiple odors using entropy, a sampling frequency per channel of 13.5 Hz was used. Thirty-two samples per frame were used, with an overlap of 16 samples, and each frame was associated with a calculated entropy value. This information was used to determine the number of sensors with entropies exceeding 1, the condition that occurs when there are more than seven sensors with entropies exceeding 1, and the continuous condition for when there are more than four frames for entropy. A sensor response to prevent incorrect extraction is also included. By adding continuous frame conditions, the abrupt rise in entropy values due to the noise between the actual inflection point and the calculated inflection point was eliminated, and thus incorrect extraction could be prevented. A total of 256 samples, from the first 32 samples to the 224 samples after the starting point, were selected as the domain for feature extraction, based on the extracted inflection point.
For odor detection, the sensor response to the input odor was applied to the information entropy, as defined by C. Shannon, for the determination of the inflection point of the sensor measurement values on the input odor. The entropy in the frame unit for an individual sensor can be calculated from (1), where


Figure 5 shows the inflection point extraction procedure using entropy. Each description is as follows: (a) multiple odors pattern, (b) entropy value for each sensor signal, (c) number of sensors with entropy exceeding the threshold of 1.0, (d) response frame with more than seven sensors with entropies exceeding the 1.0 threshold, (e) result frame with the number of continuous frames of more than four frames, and (f) inflection point of multiple odors. In order to examine the changes in the state of odors, a hierarchical elimination method was employed to search for such changes.

Inflection point extraction procedure using entropy.
The hierarchical elimination method determines how the present odor pattern has changed using the information on the odor pattern's starting and endpoint amplitudes along with information on the previous odor pattern conditions. When an odor is inputted, the amplitude increases, and when it is removed, the amplitude decreases. Thus, when the starting amplitude is smaller than that of the endpoint, an odor has been inputted, and when the starting point amplitude is larger than that of the endpoint, an odor has been removed. Multiple odors, a single odor, and an odorless state are determined according to the results of a conversion from the previous odor pattern to the present condition. A single odor is recognized when one odor is input into an odorless condition and when one of the two odors is removed. The conditions for multiple odors include that when multiple odors are being input into an odorless condition and that when another odor is input into a single odor. The condition needed to determine that an odorless state occurs when, during the initial odorless condition, one odor is removed from a single odor condition or when multiple odors are removed during the multiple odors condition. Thus, we searched for conditions such as the following: when an odorless state becomes a single odor or multiple odors, when a single odor is changed to an odorless state or to multiple odors, and when multiple odors are changed to an odorless state or to a single odor. The hierarchical elimination method decreases the number of recognition candidates.
Figure 6 shows the tree structure of multiple odors. When estimating the direction of odor sources, we did not consider the inflection point. This is the average amplitude of all sensors based on the signals of all 32 channels, which consists of a twin-sensor array of 16 channels. The sensor arrays were arranged so that a gap occurred between them, similar to the arrangement of the human nose. The amplitude of each sensor varies according to the direction of the odor. Figure 7 shows an example of the response of a real sensor based on this concept: (a) left sensor array and (b) right sensor array. We can confirm that the amplitude changes rapidly according to the near direction of the odor source.
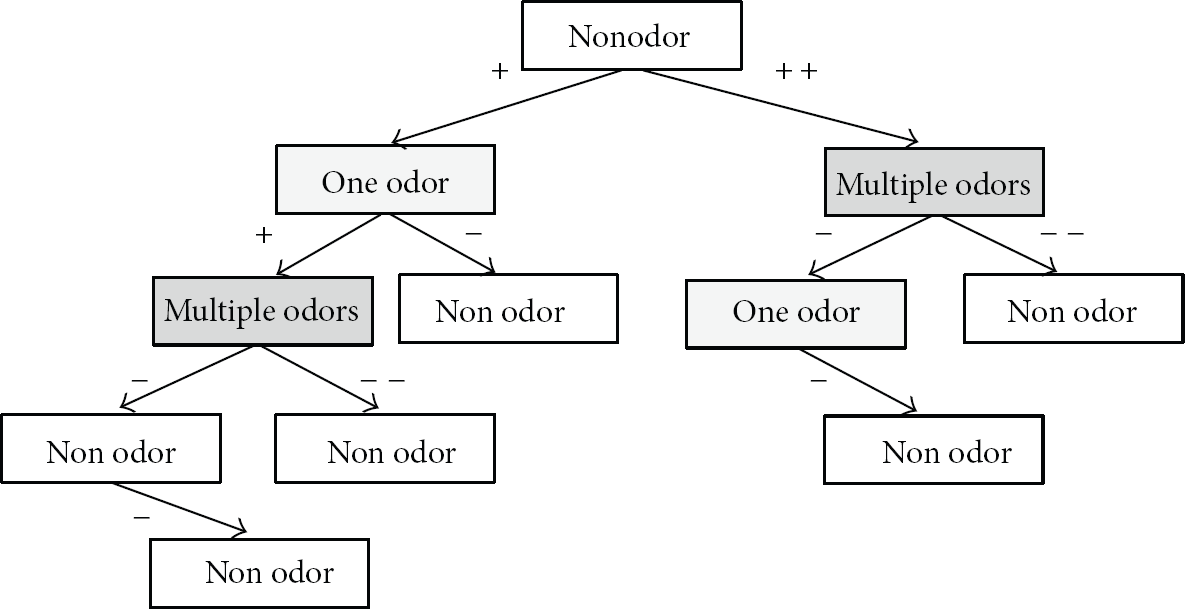
Tree structure of hierarchical elimination method.
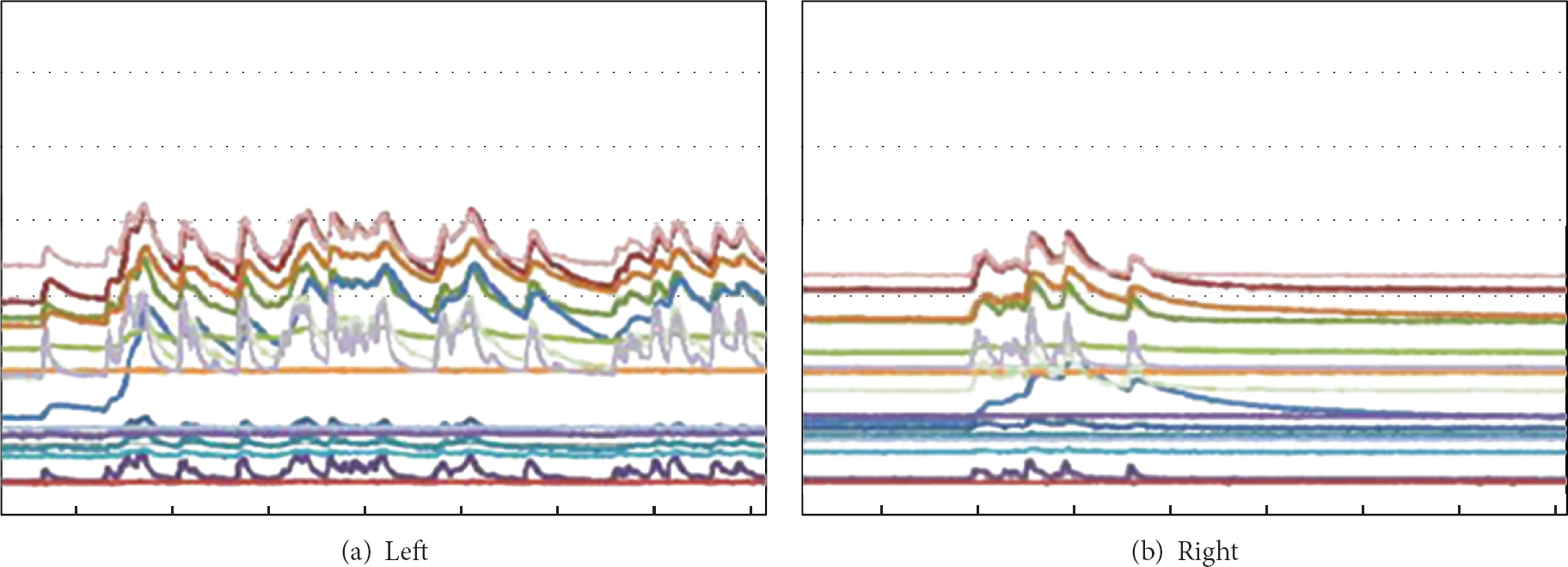
Changes of amplitude according to odor source direction.
Equations (3), (4), and (5) comprise the direction estimation method based on the amplitude of each channel. D indicates a strength average of a sensor array, S indicates a sensor array, and n refers to the number of sensors



4. Experimental Results
We developed a 16-channel twin-sensor array. Table 1 shows the specifications of each sensor, including the Calefaction Voltage (
Sensor specifications for the experiment.

The objective of the experiments was to collect multiple odor databases against various cases in which multiple odors occurred and were then eliminated. We thus performed experiments focusing on detecting and recognizing odors using collected databases. We selected 11 scenarios containing various occurrences and eliminations of multiple odors, whereby multiple odor databases were collected. Due to the lack of internationally standardized odor databases, for our odor database collection we needed to use experimental environments, experimental conditions, experimental odor sources, and so forth. In this experiment (Figure 8), flower odor sources were selected that generated odors safely and evenly. As experimental flower odor sources, four types of flower odor oils were used, contained in a small 5 mL bottle. To evaluate the efficiency of the suggested system, a total of four types of floral fragrances were used.

Components of proposed olfaction system for experiment.
The entire database was created by collecting 132 different combinations of scents, resulting from the double multiplication of six types of multiple odors by the 11 different scenarios. An example of the collection procedure for the odor database collection is as follows:
Table 2 shows the odor recognition experiment results. The results of the odor recognition experiment showed a recognition rate of about 88.97%. However, the results of the odor recognition experiment that excluded the incorrectly detected results in the detection stage showed a recognition rate of about 92.84%. Based on the experimental results for odor recognition, the lower odor recognition rate is because the odor sources used in the experiment were all derived from flower oils. Although flower oils were used to ensure the safety of the experiment, they are vegetable based, with similar intensities and characteristics. However, when mixing two flower odors, the recognition rate was relatively high due to the changes in the intensity and characteristics of the odors. The recognition rate of the odorless state was not 100% due to misdetection. The recognition rate of the odorless state excluding misdetection was 100%.
Experimental results for odors recognition.

Table 3 shows the experimental results for the estimation of the direction of the odor source. L, C, and R indicate the left, center, and right, respectively. The distance between the odor acquisition device and the floral scent was 1 m. In this estimation experiment, the odor sensor array was fixed. If this system was attached to a roll-around robot, it could search for and move to the location of the odor source. In the case of a center direction odor source, the recognition rate was somewhat poor, given the structure of the twin-sensor array. To improve the recognition rate for a center space, the distance between the sensor arrays should be adjusted according to the recognition space, or the number of sensor arrays should be increased.
Experimental results for estimation of direction.

5. Conclusion
In this study, we proposed a mechanical olfaction system composed of multiple odor recognition and odor source direction estimation abilities. The proposed system recognizes two odors simultaneously and estimates the direction of an odor source using signal amplitude. The proposed system is based on a 16-channel twin-sensor array, similar to the human olfactory system. We considered an entropy-based inflection point extraction method to detect odor activity, and proposed a hierarchical elimination method using PCA to recognize multiple odors. In addition, we used the amplitude of a stereo odor signal to estimate odor source direction. This study can be applied in various industries, study fields, robots, and realistic content in virtual reality.
The proposed olfaction system can be applied to various real-world environments. In the case of escaped gas, the proposed olfaction system can estimate the direction of a gas leak and the chemical ingredients. Moreover, the proposed system can be used as a method to distinguish between stale and fresh foods. In addition, the proposed system can detect drugs and chemicals and determine the concentration of the target matter. In future research, we intend to develop a roll-around humanoid robot with the proposed olfaction system capable of recognizing odors and of moving towards the various odor sources.
Footnotes
Acknowledgments
This research was supported by MSIP, Korea, under ITRC NIPA-2013-(H0301-13-3001) and Basic Science Research Program through NRF of Korea, funded by MOE (NRF-2010-0020210).