
Abstract
In order to improve the implement precision of shearer memory cutting, a novel approach based on the coal floor height variation which is taken as a significant factor and fuzzy optimization theory is proposed. The problem of shearer memory cutting is analyzed and the mathematic model is established. Moreover, the key technologies such as fuzzy control model, quantitative factors, and fuzzy control rules are elaborated, and the flowchart of shearer memory cutting method based on fuzzy optimization theory is designed. Finally, a simulation example is carried out and the proposed approach is proved feasible and efficient.
1. Introduction
As always, the coal-rock interface recognition is a challenging issue and decides whether the coal cutting can be carried out with high automation, low operation time, cost, and risk [1–3]. Many researchers have worked on the problem and proposed different direct recognition solutions such as γ-ray detection, cutting force response analysis, and isotope sensing boundary method [4–6]. However, to the best of our knowledge, the problem of coal-rock interface recognition has almost not been dealt with through the proposed methods because of the complex underground conditions. In order to deliver a robust solution applicable to a practical problem, a few researchers try to present some indirect methods, for example, shearer memory cutting.
As a kind of robot technology, memory cutting method is often proposed for the arduous and repeated work in engineering field. Usually, the work environment is disgusting and the labor is dangerous [7, 8]. The coal cutting operation where shearer cuts the coal from the rock-seam back and forth is a repeated and dangerous work, so shearer memory cutting method can be applied in the mining process to raise the efficiency and decrease the intensity of labor. However, due to the complex underground conditions, the shearer cutting path is different with each cycle. If traditional memory cutting methods are applied in mining process, the implement precision of shearer memory cutting cannot satisfy the intended purpose. Based on the past work on shearer memory cutting and fuzzy optimization theory, this paper tries to tackle this problem.
Bearing the above observation in mind, we apply an integration approach of floor height variation and fuzzy optimization to the problem of shearer memory cutting and the rest of this paper is organized as follows. In Section 2, some related works are outlined based on the literature. Current status of memory cutting is analyzed and some problems are pointed out in Section 3. Section 4 describes the integration approach of floor height variation and fuzzy optimization and designs the control rules and the control table of the proposed algorithm. Section 5 provides a simulation example based on the raw data from industrial production scene to verify the feasibility and efficiency. Our conclusions and the significance of the results are summarized in Section 6.
2. Literature Review
Recent publications relevant to this paper are mainly concerned with two research streams: shearer memory cutting and fuzzy control method. In this section, we try to summarize the relevant literature.
2.1. Shearer Memory Cutting
For shearer memory cutting approach, many researchers had worked on the problem and proposed different solutions since the last decades. Generally, the existing research on shearer memory cutting mainly revolves around the following three aspects. The first aspect is prediction methods for shearer memory cutting, for example, through adjusting the height of drum self-adaptively based on artificial immune to adapt the variation of geological conditions [9]. A new grey correlation degree computation method for shearer drum was designed to fix the control variable [10]. The second aspect is tracking methods for shearer memory cutting. Xu et al. presented a self-adaptive memory cutting method to adapt the control requirement [11]. Fan et al. proposed an algorithm based on grey-Markova model in order to improve the implement precision [12]. The third aspect is implement methods for shearer memory cutting, for example, Su et al. proposed an adjusting strategy through sliding-mode variable structure control to realize the automatic adjustment fast, smooth, and stable [13]. Liu et al. presented a simulation way for shearer drum cutting with memory program controlling based on fuzzy control [14].
2.2. Fuzzy Control Method
Fuzzy control method, which can simulate the cognitive style of human beings to describe the production process, is proposed by Professor Zadeh, [15] and fuzzy control rules are established to realize the control objectives with human experience. In recent years, fuzzy control method has been successfully applied to many complex systems that cannot be described with precise model. A two-wheel inverted pendulum was designed and implemented with fuzzy control method to realize the traveling and position control and the yaw steering control [16]. Fuzzy target tracking control method was proposed for autonomous mobile robots [17]. Fuzzy state-space modeling and robust observer-based control method was studied for nonlinear partial differential systems [18]. Robust adaptive fuzzy output feedback control system was researched for robot manipulators [19]. An adaptive variable structure control was designed based on SISO fuzzy backstepping method to get acceptable controller coefficient [20]. Robust adaptive fuzzy sliding mode control was put forward for a class of uncertain discrete-time nonlinear system [21].
2.3. Discussion
However, although many approaches for shearer memory cutting have been proposed in the above literature, they have some common disadvantages summarized as follows. Firstly, most of the proposed methods are applied without considering the difference between the cutting paths. Secondly, few researches have focused on the external conditions which would affect the implement precision of shearer memory cutting. Finally, the usual methods based on fuzzy control method are needed to be improved to solve the uncertain variation in mining process.
In this paper, a novel approach based on fuzzy control theory is proposed to improve the implement precision of shearer memory cutting. A simulation experiment is carried out with actual data and the proposed approach is proved feasible and efficient.
3. The Problem of Shearer Memory Cutting
The shearer memory cutting mainly consists of two parts: demonstration and implement [22, 23]. Firstly, the shearer drums are adjusted by operators manually according to the fluctuations of coal-seam. The information of shearer gestures including position and velocity can be saved into the storage unit of shearer controller, and the structure of memory data node can be shown as Figure 1.

The structure of memory data node.
The status of a shearer can be expressed as follows:

where p is the current position, v is the drawing velocity, α is the fuselage angle, β is the rocker arm angle, γ is the pitching angle, i is the index of current cycle, and j is the index of memory data nodes in cycle i.
Secondly, the controller repeats the cutting path according to the memory data saved in the storage unit, and the whole process of shearer memory cutting can be illustrated in Figure 2.

The implement process of shearer memory cutting.
Generally speaking, the implement process of shearer memory cutting can be carried out precisely if the coal floor remains invariant. However, the coal floor cannot remain invariant, so that the implement results of shearer memory cutting make the remained coal too much or cut the rock too deep as shown in Figure 3.

The problem of shearer memory cutting.
So far, due to the imperfection of sensor system, most of researchers focus on the algorithm efficient of shearer memory cutting and ignore the basic factor of coal floor [24, 25]. Based on this, we try to analyze the influence of coal floor and establish the mathematic model among the height of coal floor, fuselage angle, and drum height. Then, the memory data node can be processed through a fuzzy optimization method and the optimization results can be used to adjust the drum height. Thus, the problem of shearer memory cutting that the implement precision is not accurate can be solved.
4. The Fuzzy Optimization Method for Shearer Memory Cutting
4.1. Mathematic Model
For the two drums of a shearer, the mathematic models among the height of coal floor, fuselage angle, and drum height are similar. Thus, we take the front drum of a shearer as an example to elaborate the mathematic model.
The drum height is mainly determined by the shearer gestures and the shearer gestures in cycle i and cycle i + 1 can be illustrated as Figure 4.
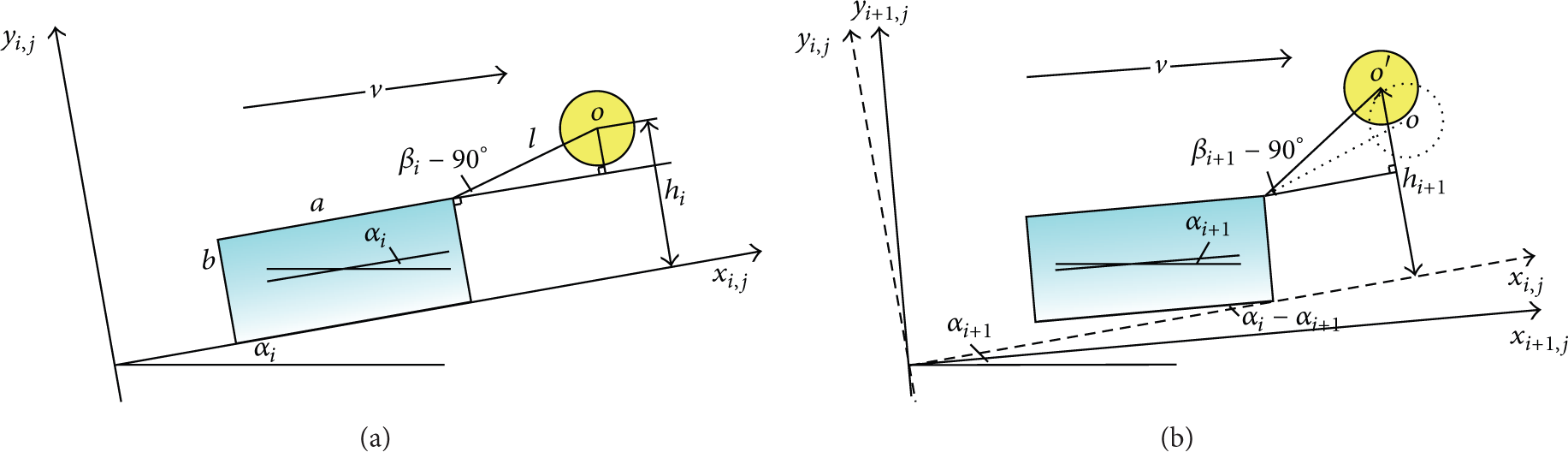
Shearer gestures in cycle i and cycle i + 1.
Where a, b, and l are the geometric parameters of a shearer and a is the fuselage length, b is the fuselage height, and l is the length of rock arm.
When the shearer is in status Si, j, the fuselage angle is α i , the rocker arm angle is β i , and the height of the front drum is h i which can be calculated as follows:

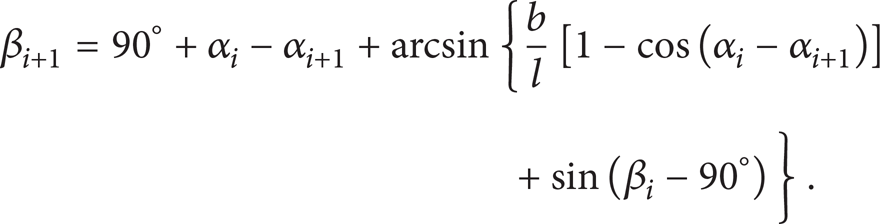
When the shearer is in status Si + 1, j, the fuselage angle is αi + 1, the rocker arm angle is βi + 1, and the height of the front drum is hi + 1 which can be calculated as follows:

In order to implement the cutting path which is consistent with the expected situation, the height of front drum in status Si + 1, j should be equal to the value in status Si, j and the angle change of rocker arm can be calculated as follows:
The variation of rocker arm angle relative to the previous cycle is Δβ1 as follows:

However, shearer memory information under different coal floor height conditions is usually shown as Figure 5.

The height change of the coal floor.
hi + 1, j′ can be calculated by the gesture information from the saved memory data as follows:

hi, j, hi + 1, j′, β i , and βi + 1′ should satisfy the relationship as follows:

When the height of coal floor has changed, the rocker arm angle should be adjusted according to the value of the calculated result as follows:

The variation of rocker arm angle relative to the variation of coal floor height is Δβ i ′ as follows:
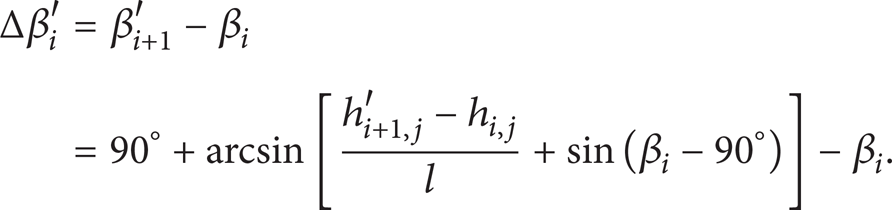
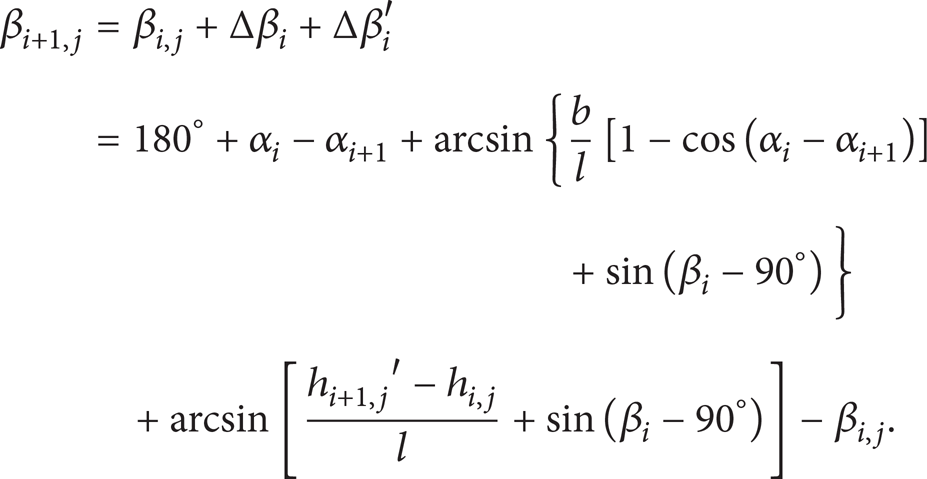
Therefore, except the static parameters a, b, and l, the rocker arm angle βi + 1, j should be along with the change of fuselage angle α i and the coal floor height h i , and the mathematic model can be expressed as follows:
4.2. Fuzzy Optimization Method
Above all, this paper takes the variation of coal floor height as an essential factor in the adjustment process of rocker arm angle. The fuzzy control method is used to solve the uncertainty of coal floor height variation caused by the complex underground conditions.
There are different fuzzy control models and this paper selects the two dimension inputs and single output system to realize the control requirement of shearer memory cutting. Take the deviation of coal floor height in contiguous cycles as e and the change of deviation as c. Take e and c as inputs and take the variation of drum height u as output [26]. To be convenient for calculating, the fuzzy input and output are often partitioned into limited number of ranges. If the values of e and c are exceeding the range of partitioned input and output, the actual values can be converted into target values according to the following formula:

where m is the lower bound of input and output and n is the upper bound of input and output. Usually, we take NL, NM, NS, NZ, PZ, PS, PM, and PL as calculated objects and NL stands for large negative, NM stands for medium negative, NS stands for small negative, NZ stands for zero negative, PZ stands for zero positive, PS stands for small positive, PM stands for medium positive, and PL stands for large positive. With the prepared significant symbol, fuzzy control rules can be established according to the experience and knowledge of production, and the Input-Output model is illustrated in Figure 6.

Two dimension inputs and single output fuzzy control system.
Universe E is the fuzzy set of coal floor height variation, universe C is the fuzzy set of change rate of E, and universe U is the fuzzy set of adjusted height values. The flowchart of shearer memory cutting method based on the fuzzy optimization theory can be shown in Figure 7.

The flowchart of shearer memory cutting method based on fuzzy optimization theory.
5. Simulation Experiment and Discussion
5.1. Data Preparation
The real-time heights of two drums can be calculated according to the gesture information and geometric parameters of the shearer. In this section, we take the front drum as an example to verify the proposed approach.
The gesture information is gathered at 1 Hz in 2 minutes of adjacent cycles shown as Figure 8. When the shearer is running in the cycle i, memory nodes data are saved into the controller unit. During the cycle i + 1, the shearer can be working according to the memory data.

Raw data curve and statistical analysis.
In Figure 8(a), the fuselage angles is changing from −5.5° to −3° and the coal floor height deviation is changing in a range from −8 cm to 22 cm. In the adjacent cycles, the coal floor height is different and the average error value is about 11.1 cm which can be calculated by the statistical data in Figure 8(b). In Figure 8(c), the theoretical height and memory height have the same form roughly, but the difference between actual trend and theory trend is larger than expected. In Figure 8(d), the deviation during the memory cutting process is listed in Table 1.
Theoretical error, height deviation, and actual error of the coal floor.

Obviously, the actual error is larger than the theoretical error due to the height deviation of coal floor. In order to improve the implement precision of shearer memory cutting, the memory data should be optimized with fuzzy theory and then be applied in the next cycle.
5.2. Fuzzy Optimization and Simulation
According to the statistical results of coal floor height, the height variation range is from −8 cm to 22 cm. Set the range of e as [−30 cm, 30 cm], the range of c as [−15 cm, 15 cm], and the range of u as [−30 cm, 30 cm]. Thus, e, c, and u can be converted to the range [−6, 6] according to the formula (11). Then the quantitative factors of e, c, and u can be calculated as k1 = 0.2, k2 = 0.4, and k3 = 0.2 separately. The membership factors of each element are determined according to the production experience and knowledge shown as Table 2.
Fuzzy sets of the elements.

If the value range of e is NL, the control variable u should be enlarged regardless of the c to make up the deviation. By that analogy, the other fuzzy control rules in different conditions can be summarized as follows
If E = NL and C = NL then U = PL.
If E = NL and C = NM then U = PL.
If E = NL and C = NS then U = PL.
If E = NL and C = NZ then U = PL.
If E = NL and C = PZ then U = PL.
If E = NL and C = PS then U = PL.
If E = NL and C = PM then U = PL.
If E = NL and C = PL then U = PL.
The output variable can be calculated according to the formula of Zadeh as follows:
Following the same routine, the output variable results can be calculated and listed in Table 3 in the case of different values of E and C.
Fuzzy control table.

Then, the memory data are optimized and used in the process of shearer memory cutting. A simulation example is carried out and the simulation result is shown in Figure 9.

The simulation result with fuzzy optimization.
5.3. Discussion
The optimization results compared with the former results are listed in Table 4. The maximum deviation is reduced from 30.0 cm to 14.7 cm, the average deviation is reduced from 15.7 cm to 0.9 cm, and the standard deviation is reduced from 7.4 cm to 4.7 cm.
The compared results before and after optimization.
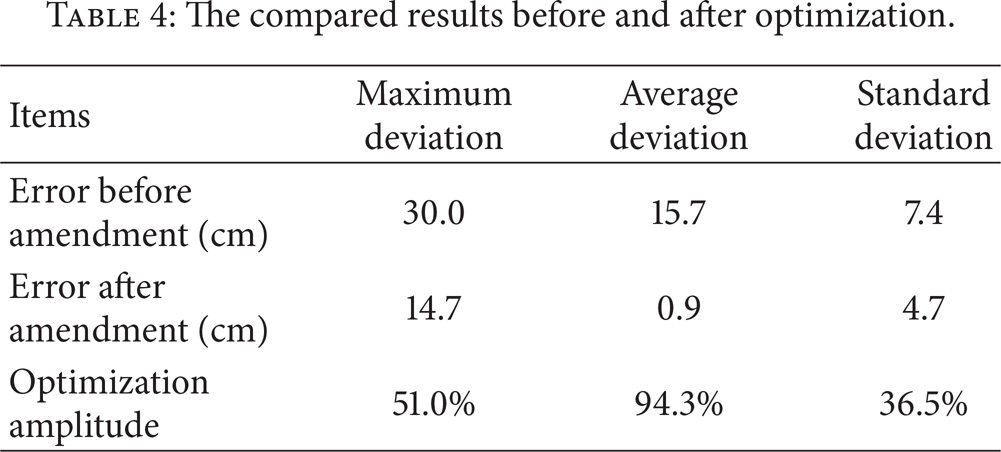
In the view of maximum deviation and average deviation, the implement precision of shearer memory cutting is improved obviously and the coal floor height is proved to be an important factor for shearer memory cutting. From the perspective of standard deviation, the fuzzy optimization method is an efficient approach to improve the smoothness of shearer cutting path.
6. Conclusion and Future Work
This paper took the coal floor height variation as a significant factor of shearer memory cutting and a novel approach based on fuzzy optimization theory was proposed. The mathematic model and fuzzy optimization method were presented. Finally, a simulation example was carried out and the simulation results showed that the implement precision of shearer memory cutting and the smoothness of shearer cutting path were improved efficiently.
In future studies, the authors plan to investigate some improvements for the proposed approach such as computing efficiency and fuzzy control rules. In addition, more intelligent control algorithms for shearer memory cutting are worth further study for the authors.
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Footnotes
Acknowledgments
The support of the National High Technology Research and Development Program of China (no. 2013AA06A411), the National Natural Science Foundation of China (no. 51005231), the Qing Lan Project of Jiangsu Province, and the Priority Academic Program Development of Jiangsu Higher Education Institutions in carrying out this research is gratefully acknowledged.