
Abstract
To achieve the purpose of energy conservation, various sleep scheduling approaches, such as duty cycle, are applied in wireless sensor networks (WSN). However, the duty-cycle mechanism results in data delivery latency, which is critical to monitor applications. To minimize the delay caused by sleeping nodes in the transmission path, we propose to “hop over” the sleeping nodes based on the range extension of cooperative transmission (CT). The transmission delay models for the random duty-cycled WSN and optimized fixed duty-cycled WSN under cooperative operation are formulated, and an algorithm named (delay-tolerant cooperative transmission DTCT) is presented for the selection of transmission modes to avoid waiting for the sleeping nodes to wake up. The energy consumption model under direct transmission (DT) and CT mode is also presented. Theoretical analysis shows that sleep latency can be greatly reduced in the cooperative scheme, and it is validated by simulations that it outperforms the traditional store-and-forward (DT) mode in delivery latency. Especially, CT reduces 67% and 14.3% of the transmission delay in random and optimized fixed low duty-cycled WSN, respectively, and DTCT algorithm saves energy by 11.29% in random low duty-cycled WSN.
1. Introduction
A wireless sensor network (WSN) is composed of a large number of intelligent sensor nodes. How to save the limited energy of the battery-powered sensors has been a focus of investigation [1–3]. Idle listening of radio is the major source of battery drain. Most existing studies propose to reduce energy consumption by turning off the transceivers and scheduling the nodes to wake up periodically, which is known as duty-cycle scheme [4, 5].
Scheduling of the nodes, though benefits energy conservation, causes transmission delay in WSN. For example, a transmitter typically adopts a store-and-forward mode when the next node is in sleep state. This means that a message packet destined to the next sleeping node, when it arrives, will be buffered and will wait to be transmitted until the node wakes up. If the packet meets a large number of sleeping nodes on the path, the sleep latency will greatly increase the end-to-end transmission delay.
Therefore, developing efficient methods to minimize the sleep latency caused by the store-and-forward mechanism is of great importance. Many efforts have been made to address this issue [6, 7]. In [8, 9], geographic information routing is exploited to find the lowest delay path. Swain et al. [10] constructed a broadcast tree from sink to each node and arranged the state of nodes in the tree to reduce the transmission delay. Cooperative transmission (CT) is a novel model introduced recently that allows combining partial messages to decode a complete message [11, 12]. Under the same bit error rate (BER), the required signal noise ratio (SNR) is lower in CT due to the diversity gain than in direct transmission without diversity. Thus, the signal can be decoded at a farther distance and the reduced SNR requirement can be used to extend the transmission range.
We propose here to minimize the sleep latency using CT strategy. Briefly, a receiver, when in sleep state, will be hopped over, and the packet is directly delivered to the active node two hops away from the sender. The sleep latency on the path can thus be avoided under this cooperative mode. In this study, transmission delay models for random and fixed duty-cycled WSN under DT and CT operations are formulated, respectively. In random duty-cycled WSN, we assume that each node is able to predict the status of its neighbors by pseudorandom number generation (PRNG) algorithm [13]. Specifically, each node in the network needs to know the seeds used by its neighbors in their pseudorandom generators; the details of the prediction process will be discussed in Section 3.2.3. Theoretical analysis and numerical simulations are performed to evaluate the efficiency of the models in reducing sleep latency on the path. An algorithm which adopts the CT strategy is presented for the aim of minimizing the delivery delay by avoiding waiting for sleeping nodes to wake up. The algorithm is named (delay-tolerant cooperative transmission DTCT). The energy consumption model of DT and CT mode is also presented.
The remainder of this paper is organized as follows. Section 2 briefly reviews the background of the duty-cycle model and derives the delay model under the store-and-forward mode. In Section 3, the delay and energy consumption model in random duty-cycle scenario and optimized fixed duty-cycle scenario under the cooperative mode are formulated and the DTCT algorithm is presented. Section 4 presents the experimental results. Section 5 is a review of the related work. Finally, we give our conclusions in Section 6.
2. Delay Model under the Store-and-Forward Mode
2.1. Duty-Cycle Model
Assume that all the nodes in WSN operate in two states, sleep and active, and the state of each node is independent. A duty cycle is the percent of time that a node spends in an active state as a fraction of the total time under consideration. The node switches between the two states periodically. For simplicity, the node state is expressed with variable

The probability of the node in active state is thus derived as follows:
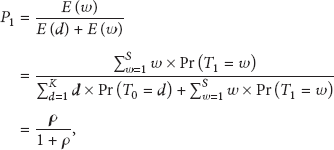
Similarly, the probability of node in sleep status is given as follows:

2.2. Delay Model under Store-and-Forward Mode
Store-and-forward is a frequently used information transmission mechanism in modern communication systems, in which message packets are transmitted from a starting node to a destination node with one or several intermediate nodes in between. A packet is received and stored by an intermediate node, and a copy is sent to the destination node. If the intermediate node is connected to more than one node, it sends a copy of the packet to each node that leads to the destination. In duty-cycled WSN, the packet will be stored if the intermediate node is in sleep state and will wait to be transmitted when the node wakes up. This process is also called direct transmission (DT) in this paper.
The delay model under the store-and-forward mode can be derived as follows. For any node


Time slot of receiver.
3. Delay and Energy Consumption Model under CT Mode
3.1. Basic Idea
In WSN, CT is widely used to improve data transmission through cooperation among network nodes, which takes advantage of the broadcast nature of wireless channels. Because of the diversity gain, CT can achieve higher quality transmission while lower BER at receivers; thus, the required SNR is lower than that in direct transmission without diversity under the same BER. Hence, the signal can be decoded at a farther distance with diversity gain and the reduced SNR requirement can be used to extend the transmission range.
Accordingly, CT is used here to tackle the transmission delay described in Section 2. Briefly, if the next node is in sleep state, the sender will collaborate with relays and forward the packet to the node after the next which is in active state, and there is no need to wait for the next sleeping node to wake up. In this way, the transmission range can be greatly extended. As illustrated in [14], when two neighboring nodes participate in the cooperative transmission, the range is 2.71 times that in direct transmission. This range extension can evidently reduce the sleep latency in transmission path. In this section, we consider to minimize the delivery delay by introducing CT in two scenarios: random duty-cycled WSN and optimized fixed duty-cycled WSN. Besides, we also proposed the energy consumption model under DT and CT mode.
3.2. Random Duty-Cycle Scenario
3.2.1. Delay Model
Random duty-cycle schedule is mentioned in Section 2.1, and we assume that the traffic in WSN is low. Thus, the delay in the route can be considered to result from the latency of the nodes in sleep state. Meanwhile, the queuing latency and collision on each node due to congestion can be neglected. In addition, each node delivers message in one time slot and the value of the slot is regular.
In the transmission path

An example of cooperative transmission.
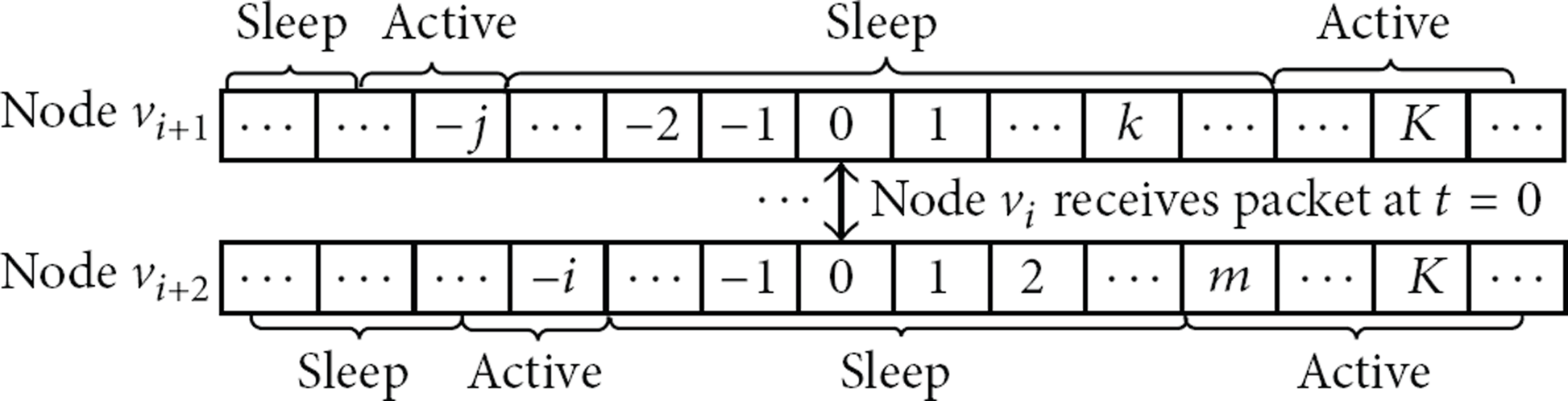
There will be three cases that the transmitter
Case 1.
When a node


A schedule of nodes in Case 1.
Case 2.


A schedule of nodes in Case 2.
Case 3.
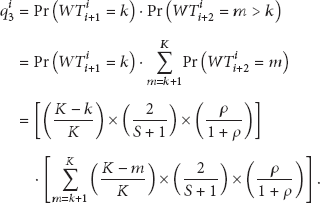
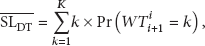
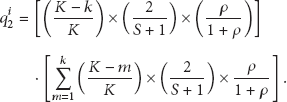
In conclusion, under the CT mode, the average sleep latency of forwarders sending packets to the downstream node is as follows:

A schedule of nodes in Case 3.
3.2.2. Energy Consumption Model
In the duty-cycled WSN, node energy consumption includes three modules: sensor module with low power, microprocessor module, and wireless transceiver module; in which the energy consumption of sensor module and microprocessor module is small and identical in DT and CT modes. We focus on the energy cost of wireless transceiver module in this section, which includes the energy consumption of packet transmission, reception, and idle listening. Note that the node in this paper can predict the status of the next hop, next two hops and the surrounding nodes through pseudorandom number generation (PRNG) algorithm; the energy consumption of idle interception under DT and CT is equal. We focus on the energy consumption of packet transmission and reception under the two modes. Figure 6 is a simple transmission model of DT and CT, where A, B, C, and D are nodes in the WSN, and the routes under DT and CT are A-B-C and A-D-C, respectively. Define the energy consumption under the two modes as follows:


A simple transmission model of DT and CT.
Transmitting Energy Consumption under DT. Notice that signal can be decoded at the target nodes, only if the SNR of the packet received at the target node is larger than the minimum value (


Transmitting Energy Consumption under CT. Notice that CT process includes two phases: (i) transmitting node A shares the packet with cooperation node D and (ii) A and D work together and send packet to the target node C through cooperative transmission.
For the first phase, the energy consumption is similar to that under DT mode; according to (13),

For the second phase, source node A works with the cooperation node D, sending packet to the target node C through cooperative transmission. The transmitting energy consumed in this process is indicated as

In conclusion, under CT mode, the minimum transmitting energy consumption is as follows:

3.2.3. DTCT Algorithm
Based on the model in Section 3.2.1, we propose an algorithm which incorporates CT strategy into the random duty-cycled WSN to reduce sleep latency. The algorithm is named (delay-tolerant cooperative transmission DTCT). Here, we give the network model and the assumptions about the algorithm first and then introduce the DTCT algorithm in detail.
Note that WSN can be denoted by a graph
The basic idea of DTCT is that a forwarder chooses the transmission strategy, either DT or CT, according to the status of the next two nodes. When the source node needs to transmit message to sink, it constructs a route
After deciding the transmission strategy, the sender needs to select relays from the neighboring nodes to cooperate with. The sender in Cases 1 and 2 is named DN (dominate node). According to [14], the transmission range is extended to 2.71 times when two relays participate in. This means that DN needs to choose relays in its neighborhood for cooperation, hops over the next node, and transmits message to the node after the next. Two factors should be taken into account when selecting the best relays: (i) node state and energy cost of CT, and only awake nodes are qualified to be the potential relays, and (ii) the lowest energy consumption node is selected to launch CT. As mentioned before, PRNG algorithm is conducted to predict the state of neighbor nodes; the active ones are considered as potential relays and defined as set

(1) Check the sleep schedule of next hop receiving message; (2) (3) do DT; {DT stands for direct transmission.} (4) (5) check the sleep schedule of node (6) (7) do CT; {CT stands for cooperative transmission.} (8) (9) Compare the waiting-time of (10) (11) wait for (12) (13) wait for (14) (15) (16) (17) (18) Direct Transmission: node directly (19) (20) (21) (22) do DT; (23) (24) pick up relay (25) (26)
3.3. Optimized Fixed Duty-Cycle Scenario
To deal with the delivery delay in nonrandom duty-cycled WSN, in this section, we introduce CT to a specific optimized fixed duty-cycled WSN: concentric ring for the grid topology, which is proposed by Lu et al. in [16]. We first review the concentric ring schedule and then conduct CT to it to reduce the average delivery delay.
In [16], the author aims to minimize the transmission latency at the given duty cycling requirement. Assume that, in a low traffic duty-cycled WSN, the node should be kept active on an average of

An example of concentric ring.
To minimize the delivery delay, we introduce CT to this optimized fixed schedule. Figure 8 is an example of the optimal concentric ring with CT, where the red and green lines are DT path and CT path, respectively. Assume that node A has a packet to send to node C at slot 0. Under DT mode, the shortest delay path is A-B-C. A can only transmit to B at slot 3; the delay from A to B is 3 slots; then, B needs to wait for 4 slots until C wakes up; the delay from B to C is 4 slots. Thus, the total delay under DT mode is 7 slots. By introducing CT to the grid, node in the network can select the neighbors to cooperate with. A could send the packet to D first; the delay between them is 1 slot, and then they transmit the packet to C together by CT; they need to wait 1 slot until C wakes up; thus, the total transmission latency is 2 slots. Hence, the shortest delay path is A-D-C. Similarly, when node E has packet to send to node H, the shortest transmission delay under DT mode and CT mode is 8 slots and 3 slots, respectively. Apparently, the delivery delay is reduced by introducing CT. The energy consumption of this schedule also follows the model proposed in Section 3.2.2.
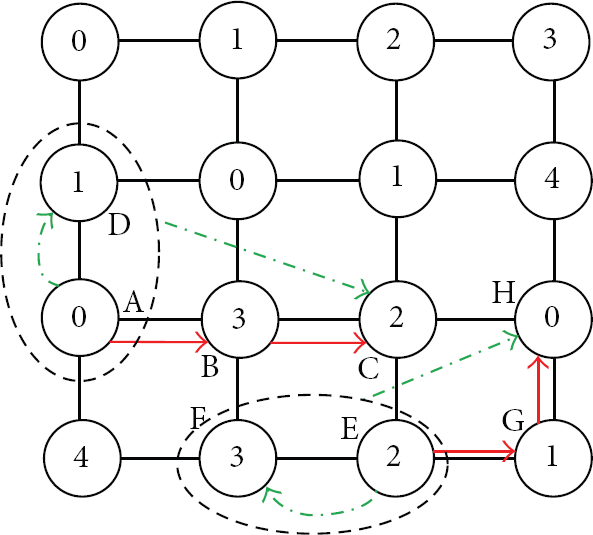
An example of concentric ring with CT.
4. Performance Evaluation
4.1. Simulation Setup
The delay models described in Sections 2 and 3 are simulated on Matlab platform. The shortest route between source and destination is identified by DSR algorithm and the packet transmission is bidirectional. We define the path loss exponent
4.2. Evaluation Results of Random Duty-Cycle Scenario
In this section, the performance of CT mode in random duty-cycled WSN scenario is evaluated. Firstly, the numerical results of CT model under different parameters (maximum sleep time slots K and maximum active time slots S) are simulated, and then the performances of the two delay models in random schedule are compared in the aspects of transmission and transmission energy consumption. Finally, transmission delay under the circumstances of different numbers of neighbor nodes in the CT model is analyzed.
4.2.1. Numerical Results
We define a metric: sleep latency gain (SLG), which is the ratio between sleep latency under the store-and-forward and CT modes.
Figure 9 illustrates the SLG in Cases 1 and 2. Apparently, SLG is constantly greater than 1, indicating that CT strategy can save the time of waiting for the next sleeping node to wake up. The maximum SLG is 12.07 at

Figure 10 depicts the SLG with different K and S in all the three cases. We can see that the minimum SLG is 1.078 when

4.2.2. The End-to-End Delay versus Node Duty Cycle
Figure 11 shows how duty cycle affects the end-to-end delay in either DTCT or store-and-forward transmission. The average end-to-end delay decreases when the duty cycle increases in both modes, and the delays of the two modes are very close to each other when the duty cycle is greater than 50%. This is because the probability of the next node to be sleeping gets smaller with the increase of duty cycle, and thus the forwarder is more likely to transmit a packet directly to the next node. Similarly, the average delay increases obviously when the duty cycle decreases. The average delay in DTCT is 3.5 times that in the store-and-forward transmission when the duty cycle is 5%. Obviously, DTCT is more adaptable in low duty-cycled WSN, in which nodes sleep longer and conserve more energy.
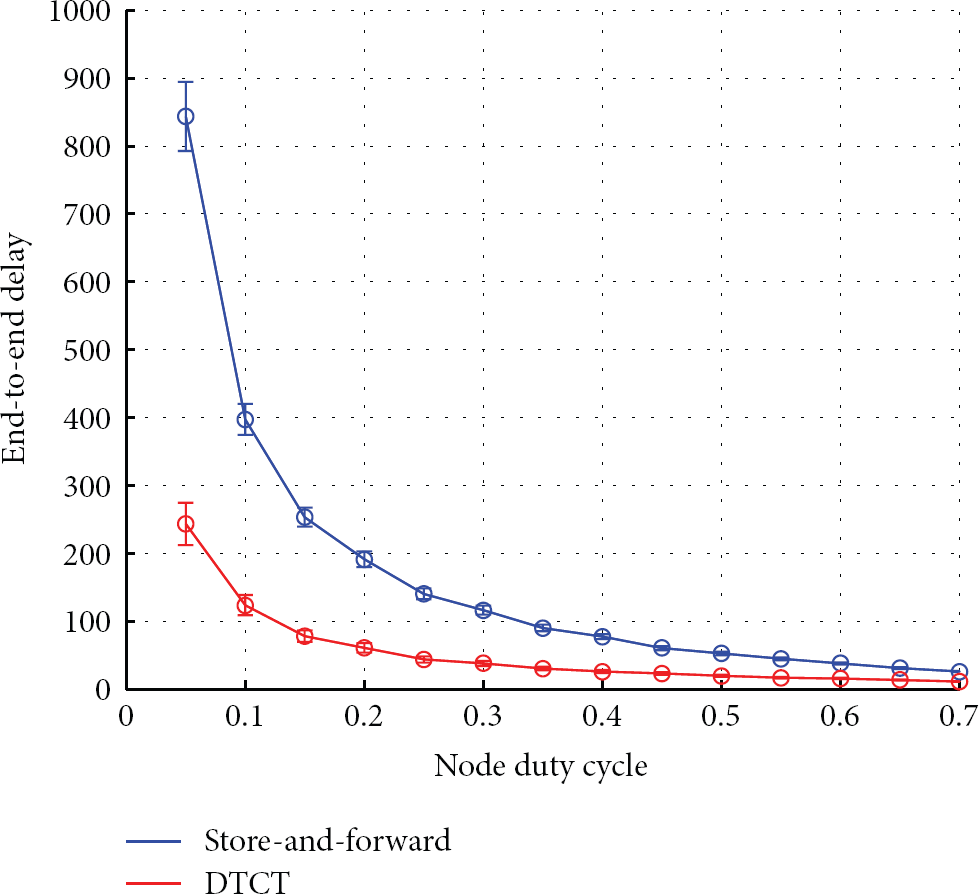
The end-to-end delay versus duty cycle for the hops = 10 and the number of neighbor is 4.
4.2.3. Transmission Energy Consumptions versus Node Duty Cycle
Figure 12 presents the average transmission energy consumption as the duty cycle increases. Clearly, DTCT could reduce the energy consumption by 11.29% on average. The reduction of energy consumption is mainly because, in the process of cooperation node selection, DTCT always selects the lowest energy consumption node as the cooperator.
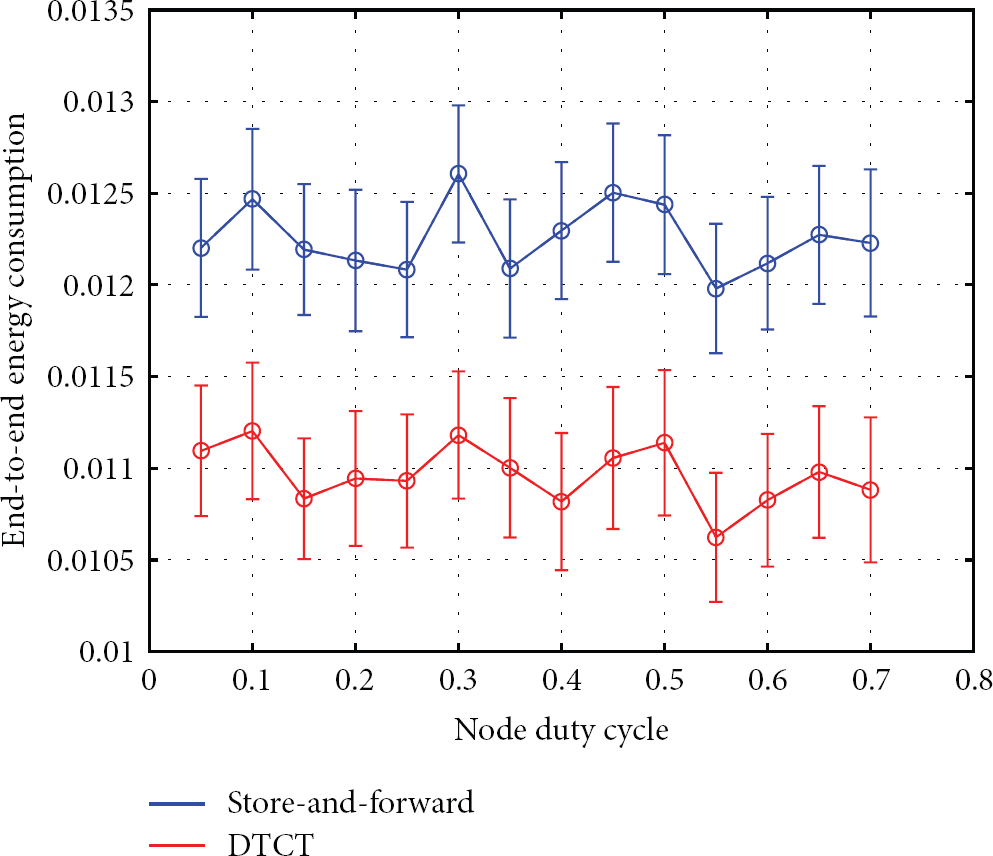
The end-to-end energy consumptions versus duty cycle for the hops = 10 and the number of neighbor is 4.
4.2.4. The End-to-End Delay versus the Number of Neighbors
Figure 13 illustrates the correlation between the average end-to-end delay and the number of neighbor nodes of the forwarder. As we can see, the number of neighbor nodes affects DTCT performance more evidently when the duty cycle is 10% (low-duty-cycled WSN) than when the duty cycle is 30% or 50%. This is consistent with the result shown in Figure 11 that DTCT plays a more important role in minimizing the end-to-end transmission delay in low-duty-cycled WSN. When ND has only a small number of neighbor nodes, the potential relays will be less. More neighbor nodes lead to a higher probability of conducting CT and reducing sleep latency. Additionally, we find that the number of neighbor nodes, when it reaches up to 4, has little influence on transmission delay in high duty-cycled WSN. Whereas, this number is 6 in low duty-cycled WSN. The results suggest that DTCT performs better in low-duty-cycled WSN.
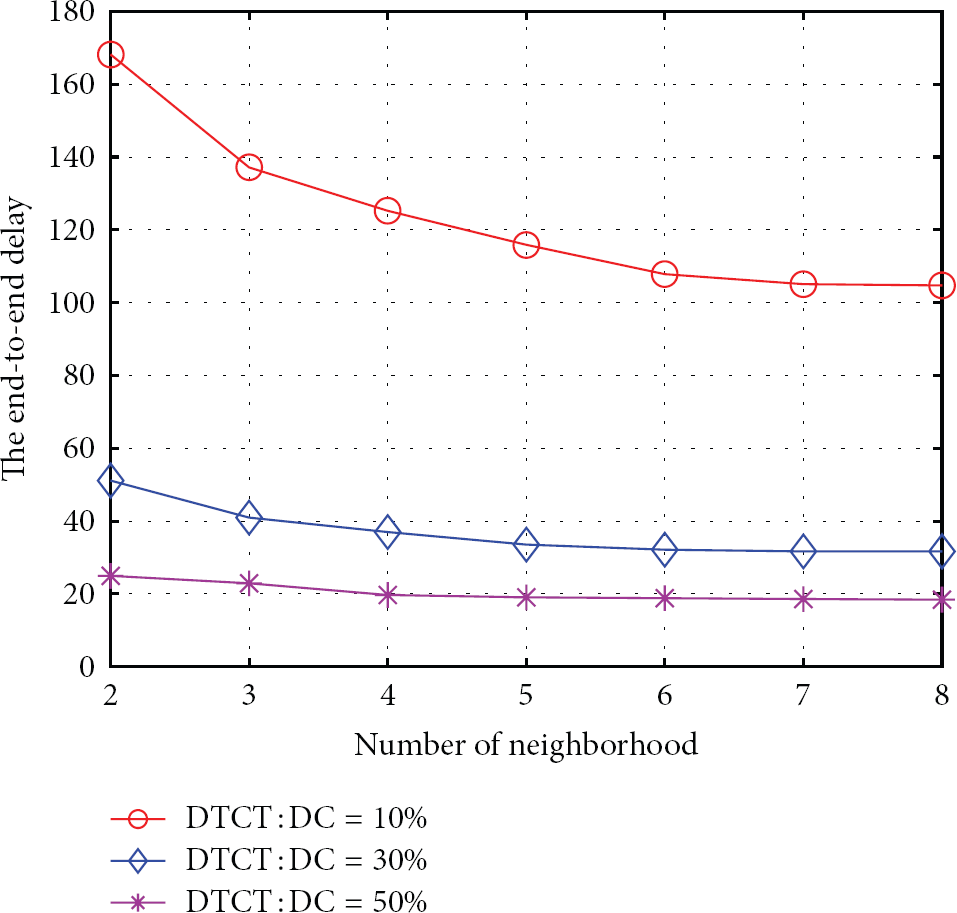
The end-to-end delay versus the number of neighbors where hops = 10.
4.3. Evaluation Results of Optimized Fixed Duty-Cycle Scenario
The performances of the two transmission modes DT and CT in the optimized fixed duty-cycled WSN are compared in the aspects of end-to-end transmission delay and transmitting energy consumption. The topology of concentric ring is shown in Figure 7, where the length of the time slots is five and the size of the grid is
Figure 14 illustrates the end-to-end delay under DT and CT modes, which are presented by the red and blue curves, respectively. The average delay under DT and CT modes is 6.02 slots and 5.16 slots, respectively. The transmission delay is reduced by 14.3% after introducing CT. Besides, the delay diameter also decreases from 12 to 11 under CT mode. Figure 15 presents the transmitting energy consumption under DT and CT modes, the average values of which are

The transmission delay of fixed schedule under DT and CT modes.

The transmitting energy consumption of fixed schedule under DT and CT modes.
5. Related Work
Currently, many researchers have addressed the issue of transmission delay in duty-cycled WSN from the following three perspectives: (1) finding the lowest latency path by routing algorithms for a given duty cycle, (2) scheduling the node duty cycle for a given path, and (3) finding the route and scheduling the duty cycle jointly.
For the first perspective, in [6], Ratnaraj et al. form sub-networks and regard the end-to-end delay as route metric to select the forwarding node so as to find the path with the lowest delay. The lukewarm forwarding routing algorithm is proposed based on spanning tree in [13]. In [17], the routing algorithm is organized in layered structure and packets are delivered to the awake-earliest node according to the layer order, so there is no fixed path. In addition, geographic information routing is exploited to find the lowest delay path more easily in [8, 9]. The research [8] puts forward a new metric as the standard of selecting the next node to achieve minimal transmission delay, and a new metric routing with the sleep-wake scheduling of each node is presented in [9]. Reference [18] proposes a (Coded Anycast Packet Forwarding CAPF) scheme which could not only reduce the end-to-end delay but also improve the reliability in WMNs. The research [19] considers the issue of minimizing the end-to-end delay bounds in WSN. The authors show that, by using a centralized algorithm to decide the link schedule and (Coordinated Earliest Deadline First CEDF), a delay bound is derived for each flow in the network.
For the second perspective, Lu et al. [16] try to arrange the wake-up time of nodes and introduce different heuristic algorithms to reduce transmission delay. The LETED approach is proposed to solve the clock drift problem of nodes in [20], in which the nodes on the path can arrange their own transceiver time slots according to the schedules of the last hop and the next hop. The research [10] constructs broadcast tree from sink to each node and schedules the state of nodes to reduce the transmission delay. The research [21] constructs connected dominating set in the network and forms a backbone composed of core nodes. The core nodes are scheduled to be in the active state while the noncore nodes in the sleep state. Data transmits through core nodes, which further forward the received information to the surrounding noncore nodes. In this way, transmission delay can be avoided.
For the third perspective, [22] presents (minimum latency joint scheduling and routing MLSR) algorithm to find nonintersecting paths to realize the minimization of delay. The research [7] solves the routing and scheduling problems by using convex optimization theory and finally realizes the maximization of network lifetime.
Nevertheless, the above three approaches transmit packets in the traditional store-and-forward manner, which leads to end-to-end delay in the path. In this paper, we adopt a cooperative way to transmit message. To the best of our knowledge, our study is the first to exploit the CT strategy in reducing transmission delay in duty-cycled WSN.
6. Conclusion
This paper addresses the issue of transmission delay in duty-cycled WSN. Cooperative transmission is employed to reduce sleep latency. The transmission delay models under both store-and-forward and cooperative modes in random duty-cycled WSN are established. In this scenario, each node in the network needs to know the seeds used by the neighbors when predicting the status of the neighbors by PRNG algorithm. DTCT algorithm is proposed for forwarders to make choice of transmission modes between direct store-and-forward and cooperative communication for the purpose of minimizing sleep latency. The cooperative transmission is also introduced to a specific fixed duty-cycled WSN. Simulations results validate that cooperative transmission outperforms the traditional store-and-forward mode in end-to-end transmission delay. In particular, CT reduces 67% and 14.3% of the transmission delay in random and optimized fixed low duty-cycled WSN, and DTCT algorithm saves energy by 11.29% in random duty-cycled WSN. In conclusion, our approach contributes to transmission delay reduction in both random and fixed low duty-cycled WSN.
Footnotes
Acknowledgment
This work is supported in part by the Fundamental Research Funds for the Central Universities under Grant xjj2011078.