
Abstract
Network based sensing has become an important field of research, and it is expected that new applications of remote sensing will be developed. A fuzzy collaborative sensor network is developed in this study to predict the cycle time of a job in a semiconductor manufacturing factory, which is an important task for the factory. In the fuzzy collaborative sensor network, each sensor detects the status of a particular job as well as various environmental conditions present in the factory and uses a fuzzy neural network to analyze the received information. Each sensor communicates its settings and forecasting results to other sensors with the aid of a central control unit. According to the experimental results, the aggregate forecasting performance was considerably improved through the sensors' collaboration.
1. Introduction
A sensor network is a remarkable technological achievement because of its promising use of human-unattended information collection [1]. Wang et al. [1] argue that there are two performance measures in evaluating the optimal routing performance of a sensor network—the network lifetime finally acquired and the total information finally collected. However, in different circumstances, these measures may not be the same. In Yan et al. [2], it was found that opportunistic collaboration has better performance than direct transmission while Sang et al. [3] developed a sensor network “testbed.” A good literature review of sensor networks can be found in Yick et al. [4]. Network based sensing has become an important field of research and new developments in remote sensing are expected. For example, a synchronized sensor network system for vibration measurement was developed in Uchimura et al. [5]. It is now possible to obtain environment information from difficult to reach places [6]. In Morreale's opinion, sensor networks have potential applications in urban “telehealth” [7].
A fuzzy collaborative sensor network is constructed in this study to predict the cycle time of a job in a semiconductor manufacturing factory, which is an important task in a modern factory environment [8–11]. The cycle time of a job is the time required to complete its operations in the factory, which can take up to several months. After the cycle time of each job in a factory is accurately predicted, several managerial goals (including internal due-date assignment, output projection, ordering decision support, enhancing customer relationships, and guiding subsequent operations) can be simultaneously achieved [12–16].
The existing approaches used to predict the cycle time of a job in a semiconductor manufacturing factory can be divided into the following categories: statistical analysis, simulation, artificial neural networks (ANNs), case-based reasoning (CBR), fuzzy theory, and hybrid approaches [15, 16]. A comprehensive comparison of these methods can be found in Chen [19]. In recent years, other scholars have engaged in similar research, which focuses on job cycle time forecasting using hybrid approaches. Some researchers classified jobs before forecasting the cycle times, for example, the pre-classifying approaches (e.g., [18, 20–22]). With preclassifying approaches, jobs with similar attributes are classified into the same category according to job attributes. However, there is no absolute measure of the similarity between two jobs. On the contrary, in postclassification approaches, jobs with the same cycle time forecasting accuracy are gathered in the same category, and the classification algorithm is tailored to the forecasting approach [10, 11, 23]. However, to classify a job by considering only the forecasting error, and not all attributes, is difficult.
In the previous research, there have been some collaborative networks for forecasting job cycle time. Most use experts and have not been automated. For example, Chen [17] utilized domain experts for predicting the cycle time of a job using fuzzy multiple linear regression (FMLR), and the forecasts were aggregated using fuzzy intersection (FI) and back propagation network (BPN). Similarly, in Chen and Lin [18], the domain experts established fuzzy back propagation networks (FBPNs) for the same purpose, and a partial consensus among the experts was sought instead. In order to improve the effectiveness and efficiency of forecasting the cycle time of a job in a semiconductor manufacturing factory, a fuzzy collaborative sensor network is developed in this study. Each sensor is a programmed device that can be used to detect the environment, or retrieve data and information from specific equipment and systems. Why is a system that is complex, time consuming, and requires the collaboration of a number of sensors used in this study? Compared with the existing methods based on expert collaboration, a collaborative sensor network can automate the required actions and is certainly more efficient. Although the existing methods can provide the same job cycle time forecast in a more realistic manner and in a shorter time, the forecasting accuracy is often far from perfect, mainly owing to the unpredictable changes in factory conditions. In contrast, using a sensor network to monitor all important parts of a semiconductor manufacturing factory ensures that no important information will be missed. In addition, seeing a problem from different perspectives ensures that no parts are ignored when solving the problem.
In the fuzzy collaborative sensor network, a set of sensors is used. These sensors are programmed, according to preprogrammed settings, to detect specific job and factory conditions that are present in its specific area. The sensors operate as a collective systematic unit, sharing and comparing the collected data with other sensors. Therefore, a mechanism needs to be established that will unify and interpret the collected data. For each sensor, a FBPN reasoning module is equipped to analyze the collected data according to the administrator's calculations. In order to facilitate the collaboration process and to aggregate the analysis results, the central control unit is equipped with a “radial basis function” network (RBF), which is considered a “reasoning module.” A reasoning module is the brains of the entire system, calculating and determining the proper course of action. Finally, the whole system is built on a centralized point-to-point (P2P) communication architecture [19, 24]. The differences between the proposed methodology and the existing methods are summarized in Table 1.
The differences between the proposed methodology and existing methods.

The rest of this paper is organized as follows: Section 2 describes the fuzzy collaborative sensor network. In Section 3, an example is used to demonstrate the application of the fuzzy collaborative sensor network. The performance of the fuzzy collaborative sensor network is assessed and compared with some existing approaches. Based on the analysis results, some observations are discussed. Finally, concluding points and future research directions are given in Section 4.
2. Fuzzy Collaborative Sensor Network
In previous research, fuzzy sensor networks have rarely been applied. Odeberg [25] focused on measuring the optimal distance between fuzzy sensors. Goebel and Agogino [26] proposed a systematic procedure for fuzzy sensor fusion. The fusion algorithm calculated the weighted average of the confidence value of each sensor reading. Deng et al. [27] believed that fuzzy sensor networks can provide flexibility in the processing of symbolic information. Born and Wright [28] established an architecture for guiding robot sensors using a fuzzy sensor fusion network (FSFN). However, despite having so much research, determining how to integrate the observations of different fuzzy sensors is still a major problem.
The concept of the fuzzy collaborative sensor network is illustrated in Figure 1. There are six operational procedures for the fuzzy collaborative sensor network.
The fuzzy collaborative sensor network starts from the deployment of a group of sensors. The administrators of these sensors determine the data that is to be collected and incorporated into the sensors' FBPN reasoning modules. Each sensor detects and analyzes the local conditions based on its own observations. Each sensor communicates its settings and analysis results to other sensors with the aid of the central control unit. After receiving the settings and analysis results of other sensors, a sensor may be prompted to modify its settings. A RBF network is employed to aggregate the sensor's forecasts. The collaboration process is terminated if the improvement in the aggregate performance becomes negligible. Otherwise, the system automatically returns to step (4).
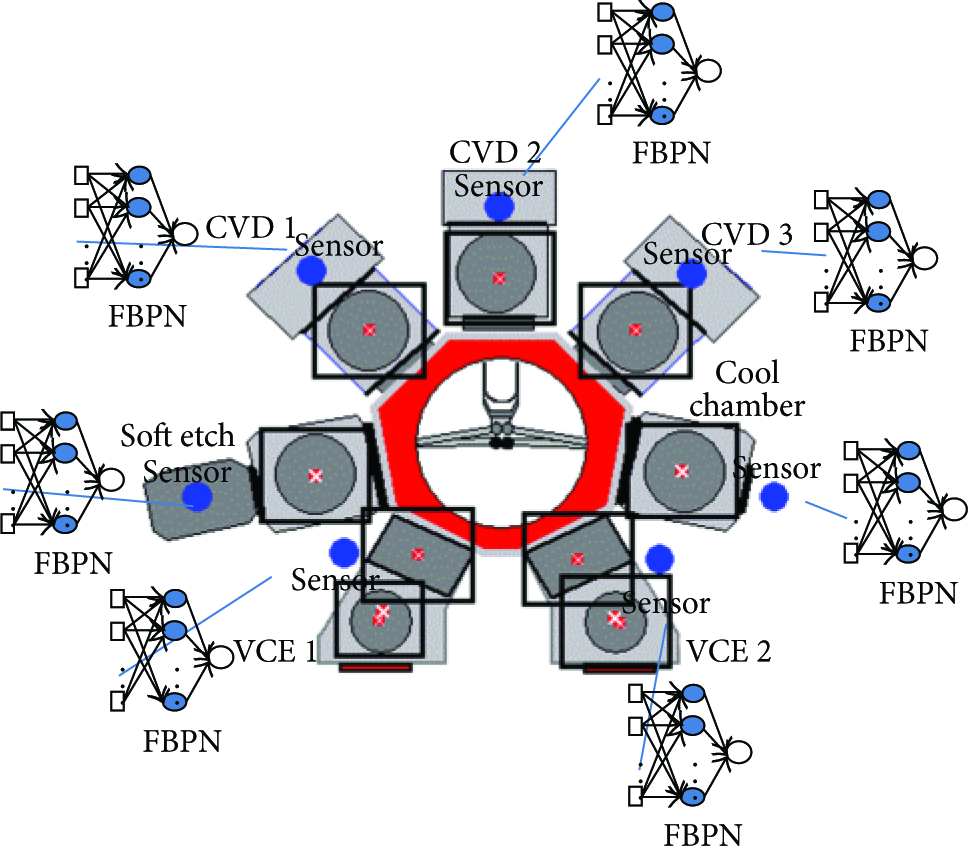
The concept of the fuzzy collaborative sensor network.
Before introducing the details of the fuzzy collaborative sensor network, we first must define all required parameters:
In the fuzzy collaborative sensor network, each sensor detects the following job actions in the factory:
the machine status, which is the equipment utilization information, the job status, the job queuing information on the processing route or before bottlenecks, the factory workload information, the waiting times of some recently completed jobs.
It uses a FBPN to analyze the information (see Figure 2). Although there have been some more advanced artificial neural networks, such as a compositional pattern-producing network, a cascading neural network, and a dynamic neural network, a well-trained FBPN is utilized in this study as it allows an optimized structure to fit very complex relationships.
Inputs: the five types of information detected by the sensor. To facilitate the search for solutions, it is strongly recommended to normalize the inputs to a range narrower than The FBPN has only one hidden layer. Two or more hidden layers slow down the convergence speed and may not lead to any better solution. The number of nodes in the hidden layer is chosen (from 1 to 10) after trying each of them. The output from the FBPN is the cycle time forecasted by the sensor. The activation function used for the hidden layer is the hyperbolic tangent sigmoid function, and for the others it is the linear activation function. 1000 epochs will be run each time. The start conditions will be randomized to reduce the possibility of being stuck on local optima [24].



The FBPN reasoning module.
In order to determine the parameter values, after preclassification a portion of the adopted examples is fed into the FBPN as a “training example.” Two phases are involved at the training stage. First, in the forward phase, inputs are multiplied with weights, summated, and transferred to the hidden layer. Second, activated signals are outputted from the hidden layer as




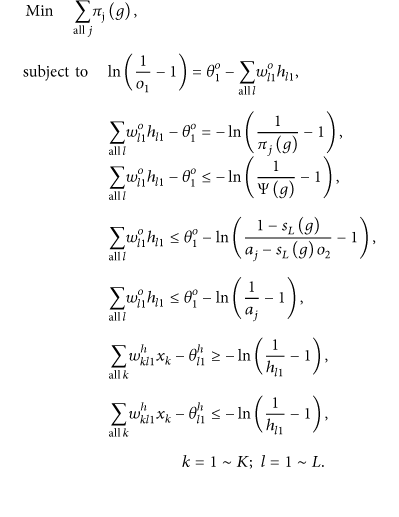
Subsequently, the following goal programming (GP) problem is solved to determine the upper bound of each fuzzy parameter (e.g.: 
Input. Sensor
Output. Sensor 
Subsequently, a RBF is used to aggregate the forecasts. In past studies, Aliustaoglu et al. [31] fused the monitoring results of different sensors with a fuzzy inference system. The RBF network has three layers: the input, hidden (middle), and output layers. Inputs to the RBF are the three corners of the fuzzy forecasts by all sensors. Each input is assigned to a node in the input layer and passed directly to the hidden layer without being weighted. The transfer function used for the hidden layer is a Gaussian transfer function, while the output layer uses the linear transfer function. For determining the parameter values, k-means (KM) is first used to discover the centers of the RBF units. Subsequently, the nearest-neighbor method is used to determine their widths. The weights of the connections can be obtained by linear regression. Compared with BPN, RBF has a better chance of escaping the local optimum.
3. Experiment
To illustrate the application of the fuzzy collaborative sensor network, an example containing the data of 500 jobs was used. There are more than ten products manufactured in the semiconductor factory. The semiconductor factory has a monthly capacity of 30,000 wafers and is expected to be fully utilized. Jobs are released into the semiconductor factory at a rate of one per 0.85 hours, namely, the mean release rate
Five existing approaches, statistical analysis (i.e., MLR), CBR, BPN, FCM-BPN [20], and collaborative FMLR [17] were also applied to the case. Performance measures including the mean absolute error (MAE), the mean absolute percentage error (MAPE), and the minimal root mean squared error (RMSE) were evaluated. The six approaches recorded and compared the manufacturing performance and are summarized in Table 2. The BPN approach, with one hidden layer with 1~10 nodes, depended on the results of a preliminary analysis for establishing the best configuration. The optimal value of parameter k in the CBR approach was equal to the value that minimized the RMSE. In FCM-BPN, jobs were classified into some categories using FCM before forecasting their cycle times. The number of categories was determined by the S test. In collaborative FMLR, some domain experts gathered and predicted the cycle time of a job using FMLR. Then, the forecasts by these experts were aggregated using FI-BPN to derive the crisp, representative value.
Comparisons of the performances of various approaches.

According to the experiment's results, we have the following.
From the tabulated results it can be seen that the difference between the forecasting results and the collected data is very small. The magnitude of the errors ranged from 0.00% to 2.65% with an average of only 1%. In fitting the collected data, the fuzzy collaborative sensor network achieved a very good performance. The estimation accuracy in terms of three measures, RMSE, MAE, and MAPE, has been assessed for each method. The estimation accuracy of MFLR was clearly the most inaccurate, which revealed the nonlinear nature of the problem. Nonlinear approaches such as BPN, FCM-BPN, and this study's proposed methodology all achieved satisfactory performances. In particular, this study's proposed methodology was superior to the five existing methods, by improving MAPE up to 33%. Compared with the collaborative forecasting method that uses real experts, collaborative FMLR and the proposed fuzzy collaborative sensor network automate the necessary actions and are therefore more efficient. Within the same time, it is more likely to find a better cycle time forecast using the proposed fuzzy collaborative sensor network. With the increase in the number of sensors, the collaboration time significantly increased (see Figure 3). As a result, if many sensors are involved, the computation becomes very complicated. For this reason, the size of the sensor coalition needs to be restricted. If a distributed P2P communication architecture is used, then the collaboration time will be much longer.
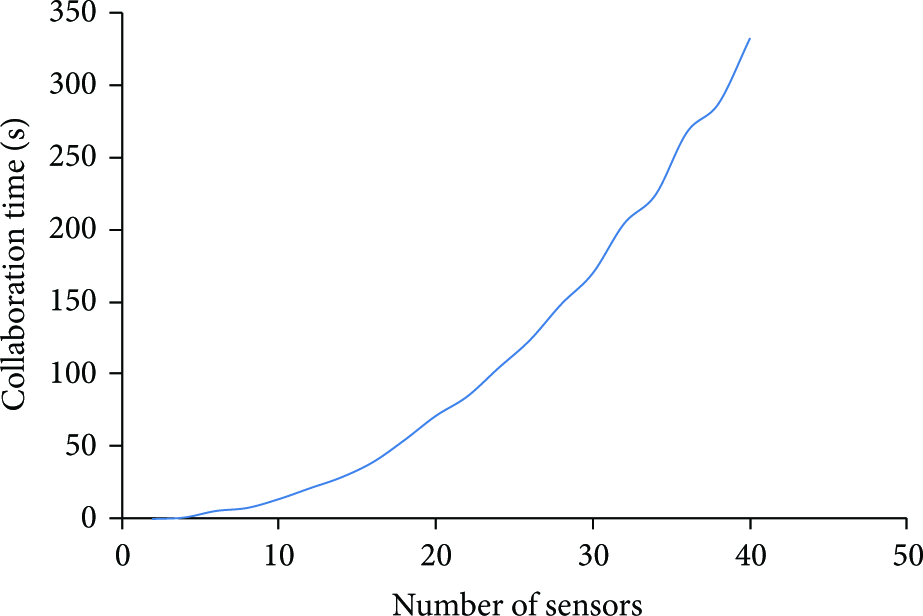
The collaboration time.
4. Conclusions and Directions for Future Research
The cycle time of a specific job has the greatest potential impact for a factory. Data analysis and forecasting in this area are extremely important. There is increasing evidence that demonstrates the widespread and long-term trend toward leaner production. Job cycle time forecasting is considered to be one of the most important tasks in determining how to make a manufacturing facility more efficient.
Empirical evidence reveals that collaborative intelligence has tremendous potential in the job cycle time forecasting application. On the other hand, network based sensing has become an important field of research, and new applications of remote sensing are expected to appear. Both points motivated us to develop a fuzzy collaborative sensor network to enhance the performance of the job cycle time forecasting. In the fuzzy collaborative sensor network, a group of sensors detect the local conditions and use FBPNs to analyze the received information. Each sensor communicates its setting and analysis results to other sensors with the aid of the central control unit under a centralized P2P architecture. The forecasts by all sensors are then aggregated by a RBF network.
After applying the fuzzy collaborative sensor network to an illustrative case, the following experimental results were obtained.
Via the sensors' automatic collaboration, the aggregate forecasting performance was seen to improve considerably. The accuracy of forecasting the job cycle time, measured in terms of MAPE, improved by up to 33%. The collaboration time associated with the number of sensors was also determined, which can be referenced to determining the suitable number of sensors. For example, with tens of sensors, the collaboration time was about five minutes, which was still acceptable. It is therefore possible to accurately forecast the job cycle time using a collection of sensors governed by a centralized collaboration mechanism.
This study's research contribution includes the following.
In the literature, fuzzy sensor networks have not been applied to cycle time forecasting. The treatment taken in this study is a viable strategy for similar purposes under a distributed decision-making environment. The centralized client-server architecture is an efficient framework for facilitating collaboration among fuzzy sensors.
If necessary, future studies may develop more sophisticated collaboration mechanisms.
Footnotes
Acknowledgment
This study is partially supported by the National Science Council of Taiwan.