
Abstract
Localization is one of the key techniques in wireless sensor network. One of the main problems in indoor mobile localization is non-line-of-sight (NLOS) propagation. And the NLOS effects will lead to a large localization error. So the NLOS problem is the biggest challenge for accurate mobile location estimation in WSN. In this paper, we propose a likelihood matrix correction based mixed Kalman and H-infinity filter (LC-MKHF) method. A likelihood matrix based correction method is firstly proposed to correct the LOS and NLOS measurements. This method does not need the prior information about the statistical properties of the NLOS errors. So it is independent of the physical measurement ways. And then a mixed Kalman and H-infinity filter method is proposed to improve the range measurement. Simulation results show that the LC-MKHF algorithm has higher estimate accuracy in comparison with no-filter, Kalman filter, and H-infinity filter methods. And it is robust to the NLOS errors.
1. Introduction
Localization is one of the most important subjects. Global position system (GPS) is the most common position system in the world. However, research studies show that the GPS performance degrades drastically when the receiver is located in large buildings. In recent years, there has been a growing research interest in wireless sensor network (WSN). Wireless sensor network that consist of thousands of low cost sensor nodes have been used in many promising applications such as health surveillance, robot navigation [1], and environmental monitoring. And localization is one of the important applications of WSN.
The classic methods to estimate the indoor location are time of arrival (TOA), time difference of arrival (TDOA), angle of arrival (AOA), and received signal strength (RSS). TOA method measures travel times of signals between nodes. TDOA method is located by measuring the signals' arrival time difference between anchor nodes and mobile node. It is able to achieve high ranging accuracy but requires extra hardware and consumes more energy. The angles between mobile node and a number of anchor nodes are used in the AOA method to estimate the location. RSS has established the mathematical model on the basis of path loss attenuation with distance, and it requires relatively low configuration and energy. And the data fusion technique has been utilized to improve the accuracy by combining two or more measurements such as TOA/AOA, TDOA/AOA, and TOA/RSS [2]. Accurate position estimation can be obtained by using filtering techniques if there exists direct propagation between the beacon node and the mobile node, also known as the line of sight (LOS). The complicated indoor environment causes non-line-of-sight (NLOS) situation. And the NLOS effects will lead to a large localization error. So the NLOS problem is the biggest challenge for accurate mobile location estimation in WSN.
In indoor environments, the NLOS signal propagation such as reflection and diffraction leads to an overestimation, which in turn results in erroneous measurements containing NLOS errors. There are two ways to deal with the NLOS situation: unknown parameters of NLOS errors and known parameters of NLOS errors.
For the unknown parameters of NLOS errors method, the advantage of this method is that it can be used with any of the ranging technologies and does not require prior information about statistical properties of the NLOS measurements. In [3], a residual weighting algorithm (Rwgh) which uses the sum of squared residuals of a least squares estimation as the indicator of the accuracy of calculated node coordinates was proposed. This method applies least squares multilateration on all possible combinations of the distance measurements and then the estimated location is computed as a weighted combination of these intermediate estimates. A Gaussian mixture model (GMM) [4] is used to model the distribution of LOS errors and NLOS errors [5].
For the known parameters of NLOS errors method, the first method attempts to identify the NLOS propagation such as hypothesis test [6], likelihood ratio test [7], and statistical analysis methods [8, 9] and then it mitigates the NLOS errors. If the identification is correct, the localization accuracy can be achieved. However, the probability of wrong identification is inevitable. The second method attempts to combine all of the LOS and NLOS measurements to estimate the location of mobile node. The interacting multiple model (IMM) approach with the Kalman filtering technique is developed [10]. And the data fusion based IMM approach is investigated [11, 12]. An M-estimator [13] is employed to estimate the distribution of NLOS errors. And an IMM based cubature Kalman filter [14] is introduced to deal with the maneuvers of the target. Most of the above mentioned algorithms rely on certain NLOS error distribution which is unknown in practice. However, most of the methods focus on cellular network or ultrawideband communication system. Very few papers investigate the mobile node mobile localization in NLOS environment for WSN.
In this paper, we firstly propose a likelihood matrix based correction method. And then a mixed Kalman filter and H-infinity filter method is proposed. A 2-dimensional analysis is provided, as extension to 3 dimensions is rather straightforward. The main contribution of this paper is given as follows.
The proposed likelihood matrix based correction method does not require identification of propagation state, and it is independent of the physical measurement ways. The proposed method does not require any prior information about the statistical properties of NLOS errors. Therefore, it can be widely used in the cellular network, ad hoc network, and wireless sensor network. In comparison with other methods, the proposed method is robust to the NLOS errors.
The rest of the paper is organized as follows. Section 2 provides the system model in LOS/NLOS conditions. We will introduce our proposed strategy in Section 3. Some simulation results will present in Section 4. The conclusions are given in Section 5.
2. System Model
In this section, we introduce some technical preliminaries. The assumption of this paper is as follows. Consider a range-based 2D localization problem employing N beacon nodes at known locations

In LOS propagation conditions, the range measurement by ith beacon node at time k is modeled as follows:

In NLOS propagation conditions, the signal does not travel in a straight line when an obstacle exists between the beacon and mobile node due to the reflection or diffusion effect. So the range measurement by ith beacon node at time k is modeled as follows:

3. Implementation of the Proposed Algorithm
The system flow of the proposed NLOS errors mitigation method is plotted in Figure 1. The input of this method is the measured distance

Architecture of the localization system.
3.1. Likelihood Matrix Based Correction
Firstly, a grid-based likelihood matrix is established to provide the initial localization results. And then the corrected range and the factor of the mixed Kalman/H-infinity filter are introduced.
At time k, the proposed algorithm consists of the following steps.
Step 1.
The area is divided into a grid Φ with


Let
In order to illustrate Step 1, we provide a simple example using a square measured distance. The measured distances of sensors are 2, 2, and 3 respectively. The locations of the sensors are illustrated in Figure 2. For the construction of the likelihood matrix V, each sensor node adds a positive one contribution to the element of V that corresponds to the cells that the measured range meets the condition

An example of Step 1.
Step 2.
The corrected range by ith beacon node at time k is can be expressed as
Step 3.
The factor of the mixed Kalman/H-infinity filter can be obtained as

3.2. Kalman Filter
Kalman filter is the most widely used method for tracking and mobile location estimation. And the Kalman filter is suggested as a promising method to range measurement for smoothing and mitigating Gaussian noise. A modified Kalman filter [15, 16] is employed to reduce the NLOS error in rough wireless environments. A modified extended Kalman filter [17] is proposed to jointly estimate the mobile state and the LOS/NLOS sight state based on the measurements. And then a Bayesian data fusion algorithm is applied to achieve high estimation accuracy. An extended Kalman based interacting multiple model smoother (EKF-IMM) [11] is proposed. The IMM is employed as a switch between the LOS and NLOS condition, which are considered to be a Markov process with two interactive models. And then the Kalman filter is used for nonlinear estimation. In this paper, we employ the Kalman filter to mitigate the measurement noise.
The state vector at time k is defined as

The measurement model is defined as (2) and (3) in LOS and NLOS environments, respectively. So the measurement model can be rewritten as


Therefore, the Kalman filter cannot perform better performance when the NLOS noise is non-Gaussian distribution.
The operation of the Kalman filter can be represented by two recursive steps. The prediction step includes the following operations:
The update step includes the following operations:

The output of Kalman filter can be expressed as

3.3. H-Infinity Filter
Although some filtering techniques such as unscented filter [18] and particle filter [19] are superior to the Kalman filter for nonlinear and non-Gaussian noise system, the computational cost is too high that they do not suit for resource limited sensor nodes. The Kalman filter is established on the H-2 estimate criterion, and it needs to know the statistical properties of the noise. However, it is not practical especially in the complex indoor environment. H-infinity filter differs from the Kalman filter in that it does not require the knowledge of the noise properties except that the noises are assumed to have bounded power. Therefore, H-infinity filter is one of the promising methods due to its simplicity, optimality, tractability, and robustness [20, 21]. However, very few papers employ the H-infinity filter into the mobile location estimation field for WSN.
The motion model and measurement model are given by

The linear combination of measurement and state vectors [22, 23] is

We assume that the initial covariance of estimation error is
So the H-infinity filter can be described as follows. Given a scale

The output of H-Infinity filter can be expressed as

3.4. Mixed Kalman and H-Infinity Filter
In this subsection, we combine the results of Kalman and H-infinity filter. It can be expressed as

3.5. Location Estimation
In this section, we briefly introduce maximum likelihood localization method. We set the position of beacon node as

The linear equation

We can obtain the coordinate matrix of the mobile node as follows:
4. Performance Evaluation
In this section, we present simulation results for the proposed LC-MKHF algorithm for mobile location estimation in non-line-of-sight environments. As shown in Figure 3(a), we randomly deploy seven beacon nodes in the 100 m × 100 m square area and one mobile node (MN) moving in the area. We assume that the mobile node has the velocity of 1 m/s. The communication range of sensor node is 150 m. We compare the proposed method with no-filter (NF) method, Kalman filter (KF) method, and H-infinity Filter (HF) algorithm. The default parameter values in the simulation are shown in Table 1. In each simulation case, 1000 Monte Carlo runs are performed with the same parameters. The performance of the proposed algorithm is measured by average localization error (ALE):

The default parameter values.


(a) The deployment of beacon nodes and obstacles. (b) The sight state of each beacon node in each sample point. (c) The average localization error in each sample point.
Figure 3(a) shows the deployment of the beacon nodes and obstacles. In this paper, the beacon nodes and obstacles are randomly deployed. And Figure 3(b) shows sight state with respect to all the beacon nodes in sample points. We can see that the sight states vary with time. In Figure 3(c), we can obtain the detailed localization errors in each sample point. It can be observed that the proposed method has better performance in comparison with other methods in most of the sample points.
In the following section, we evaluate the performance of our proposed method under different environment, that is, the NLOS errors obey different distribution. We also investigate the effect of various parameters on the proposed method.
4.1. The NLOS Errors Obey Gaussian Distribution, That Is,
In this subsection, we compare the proposed method with other methods when the NLOS errors obey Gaussian distribution. Figure 4(a) shows the relation between the average localization errors and the number of sensor nodes. The average localization errors of all methods decrease with the number of sensor nodes increase. And Figures 4(b) and 4(c) show the impact of mean and standard deviation of NLOS errors on the average localization errors. It can be observed that the mean and standard deviation of NLOS errors have a significant impact on KF and NF methods. The HF and LC-MKHF are robust to the parameters. In Figure 4(b), the proposed method has higher localization accuracy than HK, EK, and NF, about 39.59%, 48.94%, and 54.81%, respectively. In Figure 4(c), the proposed method has higher localization accuracy than HK, EK, and NF, about 28.32%, 47.91%, and 58.26%, respectively.

(a) The number of beacon nodes versus ALE. (b) The mean of NLOS errors versus ALE. (c) The standard deviation of NLOS errors versus ALE.
4.2. The NLOS Errors Obey Uniform Distribution, That Is,
In this subsection, we assume that the NLOS errors obey uniform distribution. The minimum and maximum values of parameters of uniform distribution are 2 and

(a) The
4.3. The NLOS Errors Obey Exponential Distribution, That Is,
In this subsection, we study the performance of the methods when the NLOS errors obey exponential distribution. As shown in Figure 6(a), LC-MKHF performs stably when the mean parameter increases. However, the KF and NF methods increase with the mean parameter increase. The localization accuracy improved 58.75%, 52.56%, and 41.18% when comparing with NF, KF, and HF methods. And Figure 6(b) indicates that the proposed method owns the best performance under various standard deviation of measurement noise.
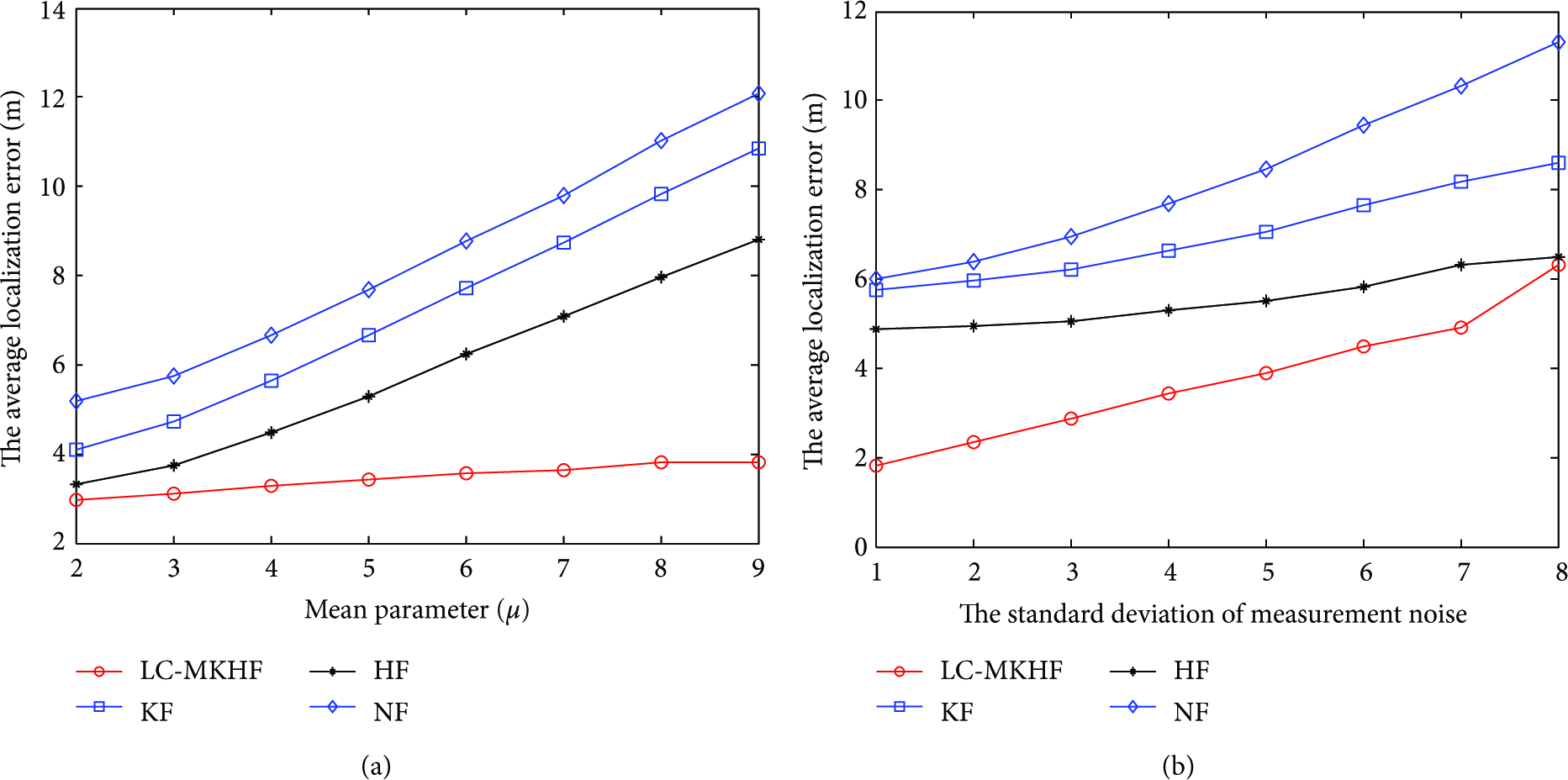
(a) The mean parameter versus ALE. (b) The standard deviation of measurement errors versus ALE.
5. Conclusion
This paper presents a novel LC-MKHF method which is robust to the NLOS errors without prior information on error model. A likelihood matrix based correction method is firstly proposed. And then a mixed Kalman and H-infinity filter is proposed to further mitigate the NLOS errors. This method does not need much parameters of the measurement model. The simulation results show that the proposed algorithm has the higher localization accuracy, and it is robust to the NLOS errors.
Footnotes
Acknowledgments
This work was supported in part by National Natural Science Foundation of China under Grants no. 61203216 and 61273078 and the Fundamental Research Fund for the Central Universities of China (N110404030, N110804004, N110404004 and N090304003).