
Abstract
A novel circle fitting algorithm is proposed in this paper. The key points of this paper are given as follows: (i) it formulates the circle fitting problem into the special source localization one in wireless sensor networks (WSN); (ii) the multidimensional scaling (MDS) analysis is applied to the data points, and thus the propagator-like method is proposed to represent the circle center parameters as the functions of the circle radius; (iii) the virtual source localization model can be rerepresented as special nonlinear equations of a unique variable (the circle radius) rather than the original three ones (the circle center and radius), and thus the classical fixed-point iteration algorithm is applied to determine the radius and the circle center parameters. The effectiveness of the proposed circle fitting approach is demonstrated using the simulation and experimental results.
1. Introduction
Circle fitting receives considerable attention because it plays an important role in computer vision, observational astronomy, structural geology, industry inspection, medical diagnosis, Iris recognition, military, security, and so forth [1–8]. For instance, to meet the increasing demand for manufacturing automation, the circle fitting technique is often applied to measure the diameter of the processing product in the manufacturing systems.
The fitting problem can be viewed as follows: estimate the parameters of a circle from a set of coplanar points. Several classical approaches [1–8], including the Hough transform (HT) methods [4, 5] and the least square (LS) approaches [6–8], have been developed to solve this problem. The former are actually to carry out a voting procedure in a three-dimensional (3D) Hough accumulator space, where every point represents a circle of a certain size. The corresponding coordinate of the local maxima is obtained as the estimated parameters of the circle. In comparison, the latter attempt to find the parameters of a circle by minimizing an error metric between the primitive and the data points.
In this paper, we develop a novel circle fitting approach by borrowing the idea from source localization in wireless sensor networks (WSN) [9, 10]. It is worthwhile to highlight the main contributions of this paper here.
It formulates the circle fitting problem into special source localization one in WSN, where each data point should be understood as an abstract sensor node in sensor networks, and the circle center represents the localized target. However, the propagation delays are unknown, and thus the existing source localization algorithms in WSN cannot be applied to solve the special source localization problem. The multidimensional scaling (MDS) analysis [11] is applied to the data points, and a special covariance-like matrix is constructed. Thus, we propose the propagator-like method to represent the circle center as the functions of the circle radius. The virtual source localization model can be rerepresented as special nonlinear equations, where the radius is the unique variable rather than the original three ones (the circle center and radius), and thus the classical fixed-point iteration algorithm [12] is applied to determine the radius and circle center.
The rest of this paper is organized as follows. The circle fitting problem is described in Section 2. A novel circle fitting approach is developed in Section 3. Simulated and experimental results are presented in Section 4. The paper is concluded in Section 5.
2. Problem Formulation
The equation for a circle centered at

The circle fitting problem (CFP) [1–8] can be described in Figure 1, that is, given data points

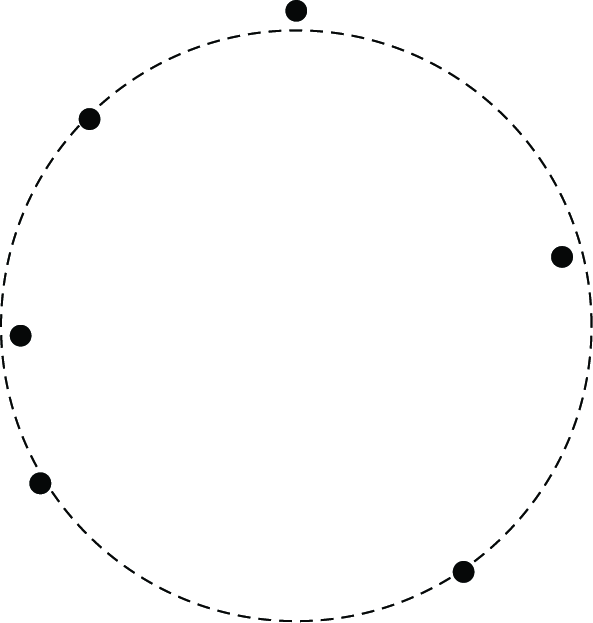
Circle fitting problem description.
3. Proposed Algorithm
In this section, we first reformulate CFP into a virtual source localization problem in wireless sensor networks (WSN) [9, 10] and then develop a novel circle fitting algorithm in this framework.
Let us review the source localization model in WSN [9, 10]:

To reformulate CFP into the source localization problem in WSN, we rewrite (2) in another form as

The source localization model in (3) is quite similar to the circle fitting model in (4), especially when
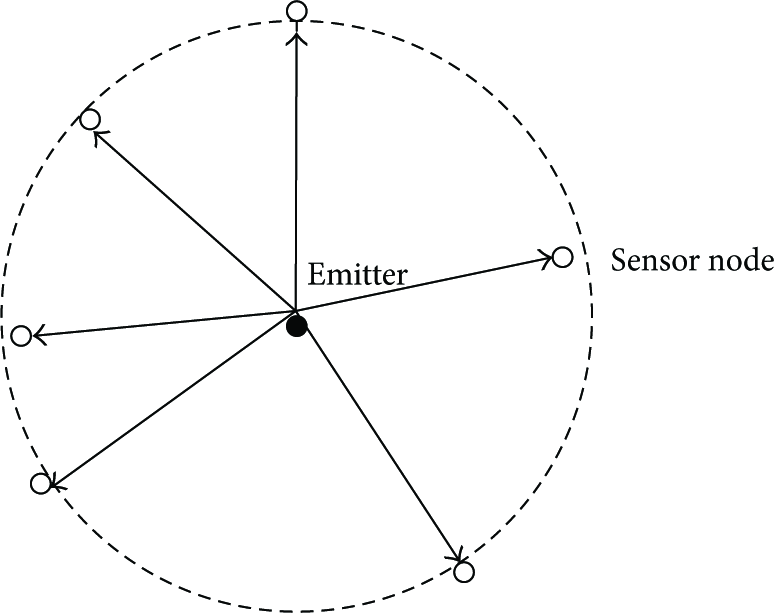
Virtual source localization in WSN.
By comparing (3) with (4), we can easily observe their differences; that is, all “propagation delays” from the “target” to “sensor nodes”
In the rest of this section, we will develop a novel algorithm for estimating the “target position”
Let



Under the ideal (without noise) case,
Since the rank of

Similar to the conventional propagator method [13], we define the propagator


Let

From (11), we can solve
Note that
Plugging (12) (i.e.,

According to the fixed-point iteration theory [12], r is the fixed point of the function


Once circle radius r is obtained from the previously mentioned iterative procedure, the circle center
4. Simulation Results
In this section, some experiments are conducted to evaluate the performance of the proposed method. For comparison, we simultaneously implement the HT method [4, 5] and the LS approach [6–8].
4.1. Experiment 1
The first experiment is implemented on
Estimated results using different algorithms (Experiment 1).


Data points used in the first experiment.
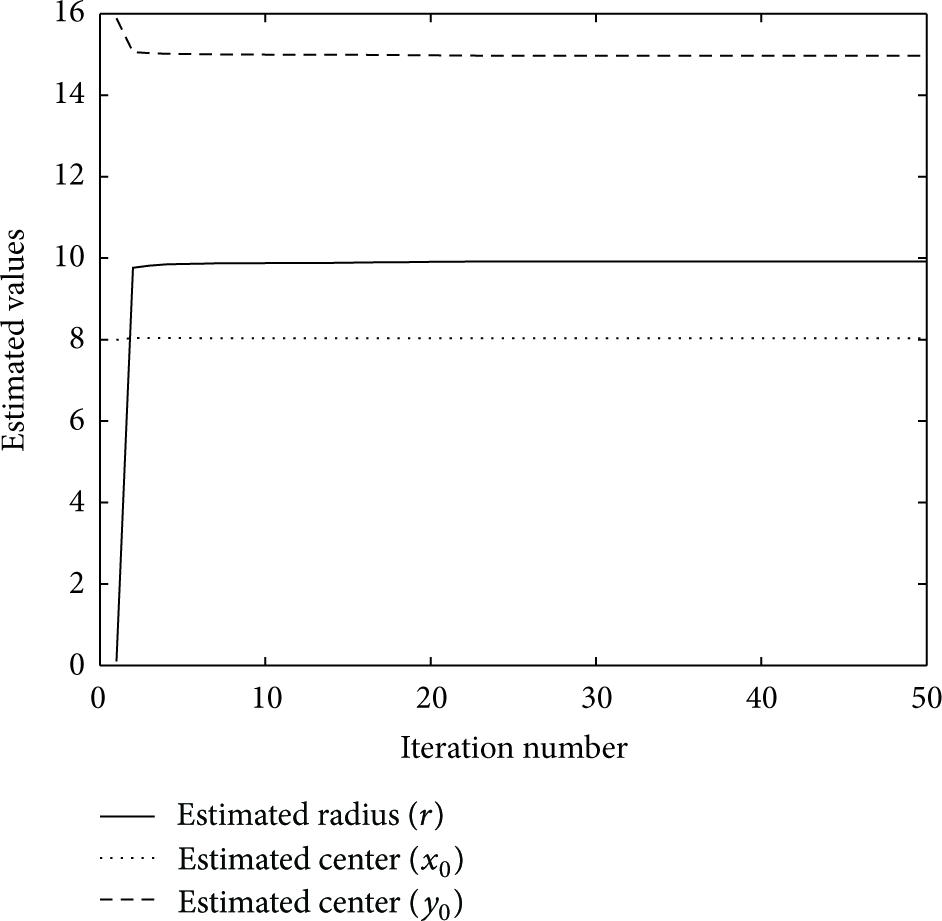
Estimated circle parameters versus iteration number (Experiment 1).

Fitting results using different algorithms.
4.2. Experiment 2
In this experiment, the proposed algorithm is applied to the real data. Figure 6 (resolution
Estimated results using different algorithms (Experiment 2).


Experimental data used in Experiment 2.

Estimated circle parameters versus iteration number (Experiment 2).
4.3. Experiment 3
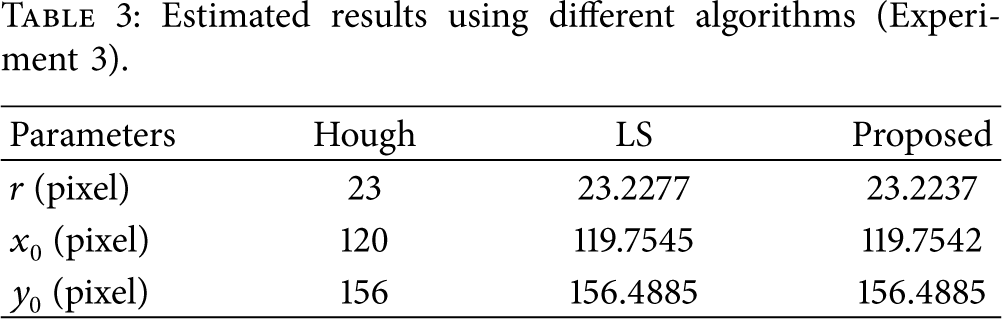
Iris recognition is a biometric identification technique based on images of the irides of an individual's eyes. Since the Iris area lies between the pupil region (a dark ellipse with the lowest intensity) and limbus region, determining the pupil region is an important preprocessing step of Iris localization. In the third experiment, we implement the proposed algorithm on the Iris image, as shown in Figure 8. Via the thresholding segmentation and Sobel edge detection, edge points are given in Figure 9. Table 3 gives the estimation results from three different methods. Figure 10 displays the fitting results by the proposed algorithm that are marked by red points, and Figure 11 shows the realized
Estimated results using different algorithms (Experiment 3).

Iris Image used in Experiment 3.

Edge points used in Experiment 3.

Fitting result using the proposed algorithm.

Estimated circle parameters versus iteration number (Experiment 3).
Although the HT method is of the highest estimation accuracy, it needs to be pointed out that the HT method requires (i) quantizing the three-dimensional space finely enough; otherwise the peaks in the transform plane will be broadened and (ii) the overwhelming burden of the three-dimensional search in the
5. Conclusion
In this paper, we propose a novel circle fitting algorithm by borrowing the idea from source localization in wireless sensor networks. Since the virtual propagation delays of all sensor nodes are unknown, the existing source localization algorithms cannot be applied. This paper formulates the virtual source localization model of three unknown parameters
Footnotes
Acknowledgments
This work was supported in part by the National Natural Science Foundation of China under Grants 61172123 and 60901059, by Excellent Youth Research Star (2012KJXX-35), and educational Department Foundation of Shaanxi Province (12JK0526).