
Abstract
Current deterministic sensor deploying methods always include the uncovered space greedily to reduce the number of deployed sensors. Because the sensing area of each sensor is circle-like, these greedily methods often divide the region of interest to multiple tiny and scattered regions. Therefore, many additional sensors are deployed to cover these scattered regions. This paper proposes a Jigsaw-based sensor placement (JSP) algorithm for deploying sensors deterministically. Sensors are placed at the periphery of the region of interest to prevent separating the region of interest to isolated regions. An enhanced mechanism is also proposed to improve the time complexity of the proposed method. The scenarios with and without obstacles are evaluated. The simulation results show that the proposed method can cover the whole region of interest with fewer deployed sensors. The effective coverage ratio of JSP method is less than 2. It is better than the maximum coverage method and the Delaunay triangulation method. The deploying sensors have more efficient coverage area, and the distribution of the incremental covered area is close to normal distribution.
1. Introduction
Sensor networks are applied for monitoring environment. Sensors are similar to the guard men standing at the specific locations for scouting. Usually, sensors have the wireless communication components to deliver their collected data back to the sink, which is a data collector in the network. Sensors can be deployed in the field for the environmental habitat monitoring [1], the natural hazards monitoring [2], the forest-fire detection [3], or the nuclear radiation detection [4]. Sensors are also used in the medical center to quicken the emergency response [5, 6]. Deployed sensors can also be used for localizing the users [7] or detecting the temperature of devices [8].
The placement of sensor nodes can be deterministic or random. The random deployment cannot guarantee the region of interest completely covered by the deployed sensors. Thus, more sensors need to be deployed to include the uncovered space [9, 10]. Giving the mobile ability for sensors to adjust their initial positions is the common used solution [11, 12]. The deterministic deploying methods consider covering the whole region of interest in the first time that sensors are deployed [13–17]. The object is determining the locations of sensors to minimize the number of deployed sensors. Finding minimum number of sensors to cover the whole space is an NP-complete problem similar to the coloring problem in a graph. Thus, finding a polynomial time solvable problem to approximate the optimal solution is the object of this research problem. The existing methods always greedily place a sensor to the place that can cover the largest uncovered space. So, the number of deployed sensors can be reduced. However, the sensing area of a sensor is circle-like. Using greedy methods to cover the whole region of interest introduces multiple small isolated regions. Sensors must be deployed in these scattered regions to achieve full coverage. Therefore, more sensors are deployed.
This paper proposes an enhanced deterministic deploying method named as the Jigsaw-based sensor placement (JSP) algorithm. Sensors are deployed from the periphery of the region of interest such as solving the jigsaw puzzle. The proposed JSP algorithm can prevent introducing the isolated regions. The open-space scenario and center obstacle scenario are evaluated. The JSP can use fewer numbers of sensors to cover the region of interest. The overlapping coverage between sensors can also be reduced.
The rest of this paper is organized as follows. The related studies are reviewed in Section 2. Section 3 gives the main idea of JSP and the methodology to reduce the time complexity of JSP. The evaluation results are shown in Section 4. Finally, the conclusion is given in Section 5.
2. Related Works
The deterministic deploying methods focus on using minimum numbers of sensors to cover the whole region of interest. Dhillon et al. presented two methods, called as MAX_AVG_COV and MIN_AVG_COV [13, 14]. The region of interest is divided into
The MAX_AVG_COV method scans all grids and computes their scores. The time complexity to determine the deploying location is

The generated isolated regions in greedy deployed methods.
Wu et al. proposed a DT-Score algorithm [16] which utilizes the Delaunay triangulation to determine the location for placing sensors. The DT-Score algorithm consists of two phases. In the first phase, the sensors are placed along the contour of the boundary and the obstacles to eliminate the coverage holes are generated near them. All grids in the region of interest are scanned to identify the contours of the obstacles. The time complexity of this phase is
At first, the DT-Score algorithm computes the centers of the circumcircles of the triangles generated by the Delaunay triangulation algorithm as the candidate positions. The center of the circum-circles with maximum radius is the position to place the next sensor. It also generates multiple scattered isolated regions as the MAX_AVG_COV method. The sensors placed near the obstacles only slightly moderated this problem. Therefore, Dhillon et al. also proposed the MIN_AVG_COV method for reducing the isolated regions. The MIN_AVG_COV method always places the next sensor at the location which includes the least uncovered space. The number of deployed sensors is also worse than MAX_AVG_COV. However, it gives the motivation to improve the deterministic deploying methods. If sensors can be added one by one from the periphery of the uncovered space, the probability to generate an isolated region will be reduced. It is similar to the strategy of playing a Jigsaw puzzle game. A similar method is proposed in [17] by considering a different coverage ratio.
3. The Jigsaw-Based Sensor Placement (JSP) Algorithm
3.1. Basic JSP Algorithm
Assume all sensors have the same sensing radius R. V is the set containing all uncovered grids in the region of interest. The set

Let


After placing a sensor at the grid
(1) V: The set of uncovered grids (2) B: The set of the boundary grids (3) (4) (5) R: Sensing radius of a sensor node (6) //Initial (7) For all (8) If (9) set (10) Else (11) set (12) End (13) //Scoring (14) Do while V is not empty (15) Use (2) to compute the score of (16) Get the highest score (17) For all (18) Case: (19) Set (20) Remove (21) Case: (22) Set (23) Add (24) End (25) If (26) Remove (27) End
The time complexity of JSP is also proportional to the number of grids. Let the grid size be
A little example is given in Figure 2 to show the operation of the JSP algorithm. Initially, all boundary grids are set to 1 and others are set to 0 as shown in Figure 2(a). Next, each grid is rescored according to the number of included boundary grids if a sensor is placed in it. As the grid (4, 3) in the Figure 2(b), it includes the boundary grids (1, 2), (1, 3), (1, 4), (1, 5), and (1, 6). So, its score is 5 (note that a grid is counted as included if more than two-thirds of the grids are covered by the sensor). Figure 2(b) shows that four grids (3, 3), (6, 3), (3, 6), and (6, 6) have the highest score 9, and the first one (3, 3) is selected as the next candidate position to place a sensor.

An example of the JSP algorithm.
As a sensor is placed at (3, 3), the grids covered by sensor is marked covered. The boundary grids covered by sensor is removed, and the grids located on the edge of the sensor coverage will be marked as new boundary grids as shown in Figure 2(c). Then, all uncovered grids will be re-scored as shown in Figure 2(d). The selected grid with the highest score is the (3, 6). After the next sensor is placed, covered grids are marked and new boundary grids are selected as shown in the Figure 2(e). This procedure is performed until all grids are covered. In this example, the final positions to place sensors will be (3, 3), (6, 3), (3, 6), and (6, 6).
3.2. Improved JSP Algorithm
In Algorithm 1, all grids in the set V are scanned to update the score value after a sensor S is deployed. However, only those grids near the deployed S need to be rescored instead of all grids in V
. As the example in Figure 3, the sensor S is placed at the grid X. Those grids covered by S set their scores to zero. The grids in the coverage edge of S become the new boundary. The uncovered grid whose minimum distance to the boundary grids is less than R should update its score. The grids to refresh their score will be the ones whose locations are within the circle

The rescoring area after a sensor node deployed.
By limiting the area to update score, JSP can effectively reduce the time complexity from
(1) V: the set of uncovered grid points (2) B: the set of the boundary grid points (3) (4) (5) //initial (6) For all (7) If (8) set (9) Else (10) set (11) } (12) (13) //scoring (14) Computes the (15) Use maximal heap tree to maintain sorting results of (16) Place the sensor at (17) Do While (V is not empty) { (18) For all (19) Case: (20) Set (21) Remove (22) Case: (23) Set (24) Add (25) } (26) Remove the (27) Computes the (28) Re-heap maximal heap tree, Place the sensor at (29) }
4. Simulation Results
This section shows the simulation results. The proposed JSP method is implemented using the C++ program. The MAX_AVG_COV method [13, 14], and the Delaunay triangulation method [16, 17]. The MAX and DT represent the MAX_AVG_COV method and the Delaunay triangulation method in the following figures. The MIN_AVG_COV method is not compared because its result is worse than that of the MAX_AVG_COV method. The evaluation methods include the number of deployed sensors, effective coverage ratio (ECR), and distribution of incremental coverage area (ICA).
The number of deployed sensors evaluates the efficiency of a deterministic deploying method when the size of region of interest is fixed. The method using fewer sensors to cover the region of interest is more efficient. The effective coverage ratio is the ratio that the maximal coverage area generated by all deployed sensors over the area of the region of interest. The method which generates less overlapping area between sensors will have small ECR. The
4.1. Environment Setup
In our simulation, the region of interest is
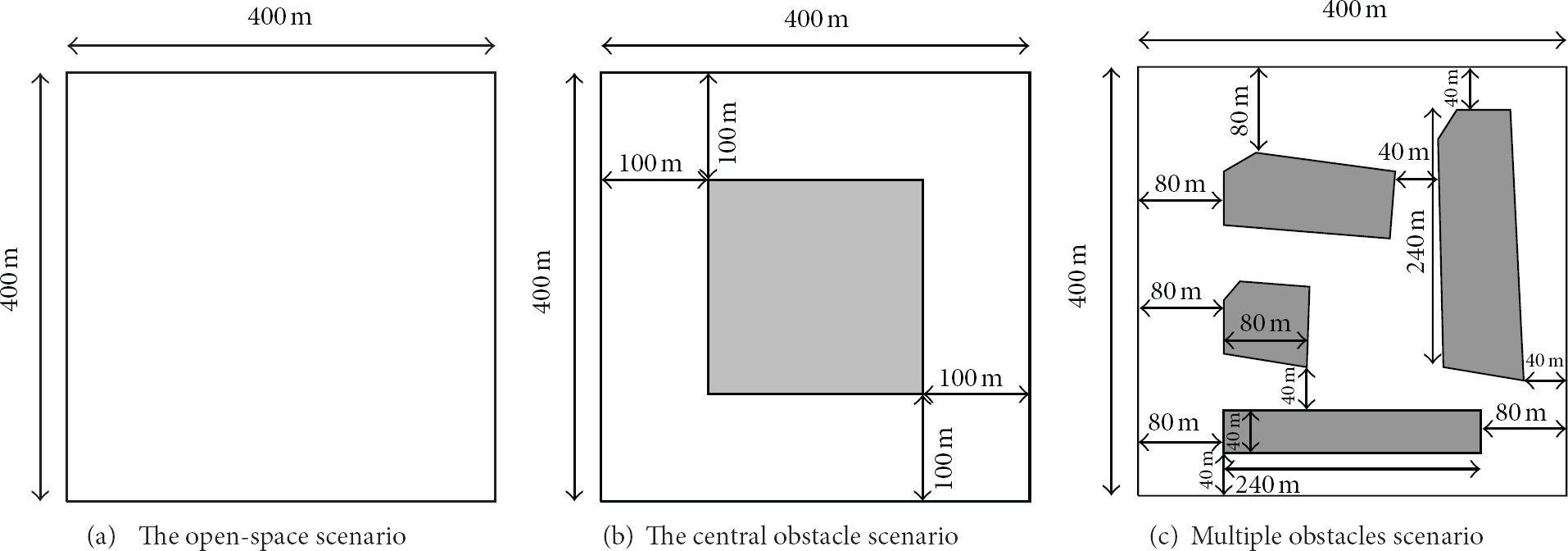
The simulation scenarios.
4.2. Numerical Results
Figure 5 shows the number of sensors deployed to cover the whole space. The OPT represents the ideal case which simply divides the whole area size of the region of interest by the coverage area of a sensor. Because the sensing area of a sensor is a circle, the coverage areas of sensors must be overlapped. Thus, no method can use the same number of sensors to cover the whole region of interest as the OPT method. The OPT method is used as the lower bound of the number of deployed sensors.

The number of deployed sensors in both scenarios.
In both simulated scenarios, the MAX method deploys most numbers of sensors to cover the whole space. This method introduces many small isolated regions when it greedily searches the position which can cover the largest uncovered space to place the next sensor. Thus, additional sensors are placed to cover those isolated regions. Increasing the sensing radius does not change the situation of the MAX method. The MAX method still has the worst result in any kind of sensor radius. More than 200 sensors are used to cover the whole space when sensing radius is 20 m in both scenarios.
The number of deployed sensors in the DT method is slightly better than the MAX method in both scenarios. The number of sensors of the DT method is less than the MAX method about 5% to 12% in the open-space scenario and about 10% to 20% in the obstacle scenario. Sensors in DT method are initially deployed along the contour of the region of interest. The DT method needs to add sensors one by one to cover the whole regions. The next location to add a sensor is the center of the circum-circle of the triangulation with the largest radius. Therefore, DT method is also similar to the MAX method that greedily places the next sensor to cover the maximum number of uncovered grids. However, placing the sensors along the boundaries of the obstacles prevents overlapping near the boundary of region and the obstacles. Thus, the results of DT method are better than those of the MAX method.
The JSP method exhibits better results than the MAX and DT methods in both scenarios. The number of deployed sensors of the JSP method is less than the MAX method about 34%–36% in the open-space scenario and about 28%–39% in the obstacle scenario. JSP also greedily includes the uncovered spaces, but it prevents dividing the uncovered space into isolated regions. In the open-space with sensing radius 20 m, JSP only needs 150 sensors to cover the whole space. The number of deployed sensors in the JSP method is about 1.5 times of the sensors used in the OPT method. In the obstacle scenario, the number of deployed sensors is still less than twice of that in OPT. The scenario with multiple obstacles is similar to the center obstacle scenario. More obstacles will also increase the initial deployed sensors of the DT method. More sensors are placed in the contour of the obstacles. As the sensing radius increases, the DT method still needs deployed sensors to enclose the obstacles. Therefore, the number of deployed sensors is close to that in the results of the MAX method.
Figure 6 shows the results of the ECR. The ECR of the OPT method is 1 which is the lower bound. The ECR of the MAX method is higher than 2.2 in both scenarios. In the obstacle scenario with sensing radius 50 m, the ECR of MAX is 3. This result implies that increasing the sensing radius generates more overlapping between sensors. When the space is divided into multiple isolated regions, large sensing radius will worsen the ECR. The ECR of the DT method is 2 in both scenarios. Placing sensors aside, the contour reduces the overlapping coverage near the boundary and obstacles. The ECR of JSP is less than 1.8. It can suppress the ECR even increasing the sensing radius. In the scenario of multiple obstacles, the ECR of DT method in the cases of sensing radius 40 m and 50 m is worse than the MAX method. Large radius causes the initial deployed sensors which enclosed the obstacles to severely overlap their sensing areas with others. Therefore, the ECR is worse than the MAX method.

The effective coverage ratio.
The distribution of ICA in the open-space scenario is shown in Figure 7. In the MAX method, the deployed sensors with ICA less than 20% sensing area are 40%–50% and the number of sensors with ICA more than 90% sensing area is 20%–40% as shown in Figure 7(a). The percentage of sensors with high ICA decreases when the length of sensing radius increases. It is related to the results in Figure 5. The MAX method deploys many sensors to cover the isolated regions.

Distribution of ICA in open-space scenario.
The DT method improves the ICA but still many sensors are deployed to cover the small regions. The 25%–35% deployed sensors have their ICA less than 20% sensing area and 40%–50% sensors have their ICA more than 80% sensing area. Greedily placing the next sensor at the center of the circum-circle of the triangle with maximum radius introduces isolated regions as the MAX method. Deploying sensors near the contour of obstacles only moderates the problem suffered by the MAX method.
For the JSP, approximating 70% deployed sensors have their results on ICA more than 80%. The percentage of the deployed sensors with ICA smaller than 20% is less than 10% in all simulated sensing radii. The fluctuation of the ICA distribution is less than 10% when the sensing radius increases. The ICA with 70%–80% dominates the major portion of the deployed sensors. The results imply that JSP algorithm prevents deploying a sensor for covering a tiny uncovered space.
Figure 8 shows the ICA in the obstacle scenario. The distribution is similar to Figure 7. In all compared methods, the distribution of ICA has explicit fluctuations when sensing radius is more than 40 m. Large sensing radius includes more area occupied by the obstacle. Thus, the distribution has great variation. However, the JSP and the MAX can still retain the distribution trend as shown in Figure 7. For the DT method, the obstacle limits the organization of the Delaunay triangulations. Therefore, the DT method exhibits different ICA distribution.
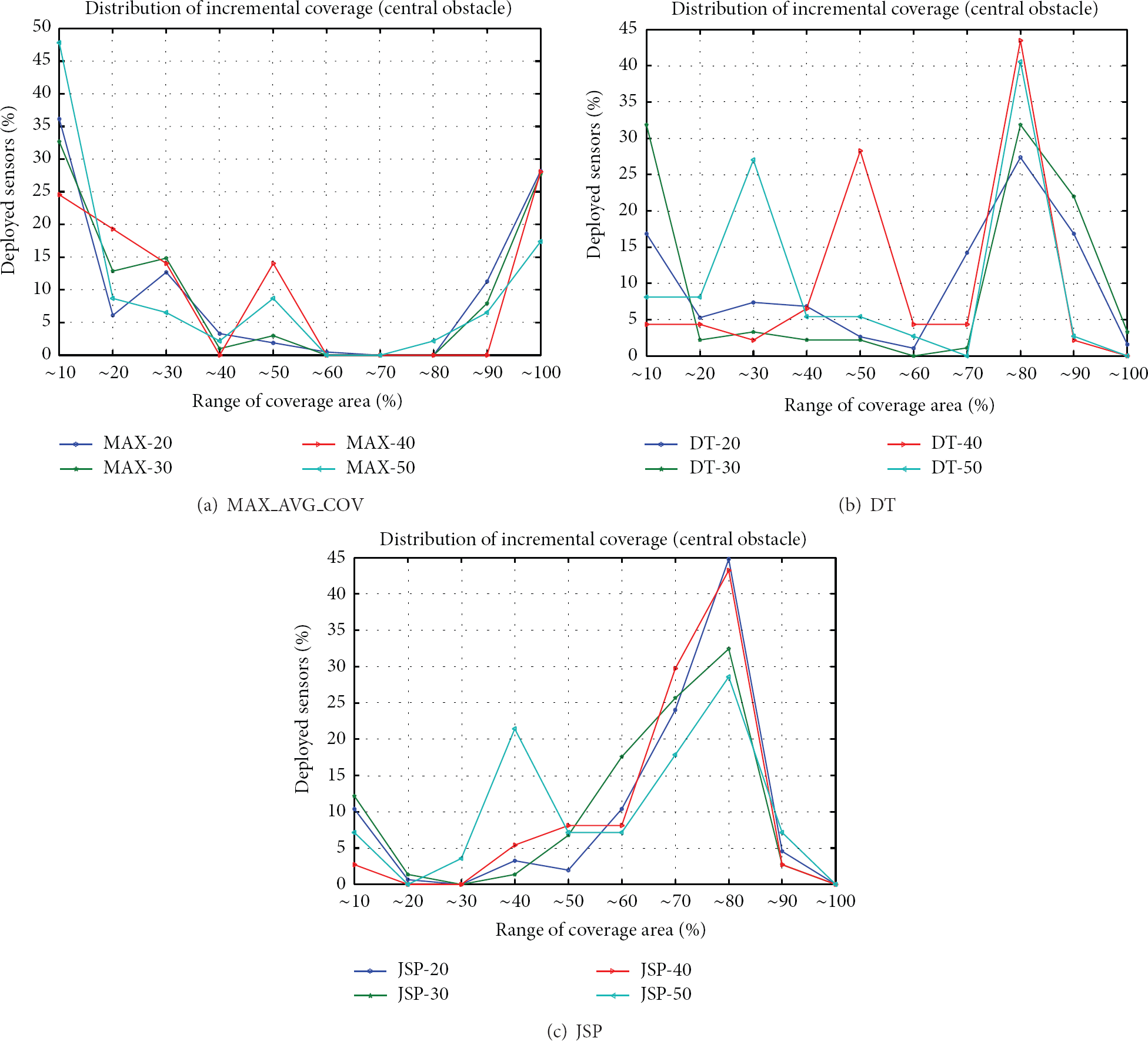
Distribution of ICA in central obstacle scenario.
Figure 9 shows the ICA of the scenario with multiple obstacles. The MAX method and the JSP method still retain the distributions as the Figures 7 and 8. However, the distribution of the DT method has changed. Most of the sensors are used to cover a tiny area. The deploying efficiency of the DT method greatly decays in the scenario with multiple obstacles.

Distribution of ICA in multiple obstacles scenario.
5. Conclusions
This paper proposed a Jigsaw-based sensor deploying (JSP) algorithm for wireless sensor network. Sensors are placed at the periphery of the region of interest. The JSP method prevents dividing the uncovered space into isolated regions and uses fewer numbers of sensors to cover the whole region of interest. The time complexity of the enhanced JSP algorithm is