
Abstract
Energy efficient collaborative target tracking in a wireless sensor network (WSN) is considered. It is assumed that the distance estimates of range sensors are contaminated by distance-dependent multiplicative observation noises. The nonlinear measurement model leads to the application of a generalized unscented Kalman filtering (GUKF) tracking algorithm. Energy efficient operation is achieved by imposing an energy balance criterion to select a subset of sensors near the target to participate in collaborative tracking without compromising tracking performance. This is formulated as a multiobjective constrained optimization problem that minimizes both the state covariance of the GUKF algorithm and the variance of on-board residue energy of sensor nodes within the detection range of the target. An efficient, distributed, polynomial time heuristic algorithm that achieves a performance close to the optimal solution is proposed. Extended simulation results indicate that this proposed joint scheduling and tracking algorithm is capable of delivering desired tracking performance while significantly extending the WSN lifespan.
1. Introduction
Wireless sensor network consists of a large number of low cost sensor nodes that sense signals of environment or specific target/event and aggregate sensing data via wireless channels. WSN has a wide range of civil and military applications such as target tracking, infrastructure monitoring, habitat sensing, and battlefield surveillance [1–3]. Due to limited on-board energy reserve, energy efficient operation of WSN is a critical design objective to extend the operating lifespan and reduce maintenance cost. To accomplish this, WSN must rely on collaborative signal processing to dynamically manage sensor resources and effectively process distributed information [4].
Among many tasks of WSN, tracking moving target in a sensing field is a challenging, yet ubiquitous problem that has attracted much attention. Statistically, target tracking can be formulated as a sequential Bayesian estimation problem which is often realized in the forms of the Kalman filter (KF) [5] or its variants [6–13]. These algorithms assume the target movement can be described by a dynamic system model where the state (location, speed, etc.) can be observed via a measurement model. In a WSN, different sensing modalities including discrepancies of time of arrival [14], attenuation of signal intensity [9], and phase lags [15] lead to different measurement equations and hence different Kalman filter formulations. In this work, we focus on the range estimation sensor that returns a measurement of distance from sensor to target when such a distance is within the detection range of the sensor. The distance from sensor to target is a nonlinear function of the target position. Furthermore, it has been observed [16] that the accuracy of range estimation reduces as the distance between sensor and target increases. Recently, an EKF algorithm [17] using a distance-dependent multiplicative measurement noise model has been reported and a generalized unscented Kalman filter (GUKF) algorithm has been derived.
For target tracking, several works have addressed the energy efficiency issues [18–22]. Recently, an energy balanced dynamic sensor selection method [23] is proposed; this method advocates choosing only energy-abundant sensor nodes to participate in WSN tracking and leaving energy-deprived nodes in sleep mode to conserve energy. Under the identical measurement noise model assumption, it is shown that the WSN lifespan may be extended mostly if the variance of the residue energy distribution of all sensor nodes is minimized given a fixed amount of total energy consumption. This assumption, however, is not applicable to the range sensor where the distance-dependent observation noise model is more realistic.
In this paper, it is envisioned that a moving target in a sensing field is to be tracked by multiple range sensors. Sensors within the detection range of the target position will detect the target and estimate the sensor-to-target distances. Usually, the distance estimates are less accurate for far away targets. The distance dependence measurement errors of range-estimating sensors can be modeled as multiplicative measurement noises. The distance estimates will be forwarded to a local fusion center sensor node via wireless channels. At the fusion center, a generalized unscented Kalman filtering (GUKF) algorithm is incorporated to facilitate tracking while mitigating the multiplicative nonlinear measurement noise.
In a densely deployed WSN, due to correlation among sensor readings, not all sensors within the detection range need to be tasked to perform sensing and reporting. Instead, only a subset of sensors within the detection range of the target will be selected to perform sensing while the remaining redundant sensor nodes may be put into sleep mode to conserve energy and to extend the network lifespan. In this work, this subset selection problem is formulated as a constrained multiobjective optimization problem that seeks to (a) minimize the total energy consumption for executing the tracking task and (b) minimize the variance of the energy reserve at sensor nodes after the current tracking step while the tracking performance is maintained above a preset threshold. It is well known that subset selection is NP-hard. We exploit the traditional Pareto frontier optimization approach to eliminate unfavorable solutions and develop several heuristic selection methods to search a reasonably good solution in polynomial time. The effectiveness of these heuristic selection methods is compared using simulation.
The main contributions of this paper are to consider a practical distance measurement model that provides a more accurate noise model for range-estimating sensors and propose an energy balanced scheduling algorithm for distributed target tracking with distance-dependent multiplicative observation noise to extend WSN lifespan.
The rest of this paper is organized as follows. In Section 2, we review our target motion and signal measurement models. GUKF tracking algorithm is given in Section 3. Energy balance criterion is presented in Section 4. Energy balanced scheduling problem for tracking is formulated and some heuristic scheduling algorithms are proposed in Section 5. In Section 6, we conduct performance evaluations of the proposed heuristic scheduling algorithms by simulation comparisons. Finally, some conclusions are given in Section 7.
2. Target Tracking Models
2.1. Target Motion Model
The motion of a moving target within the WSN at a location


2.2. Signal Measurement Model
We assume that N identical sensor nodes are densely deployed over a 2D sensing field according to a uniform random distribution. The position of the nth (
In this work, we assume that each sensor node is equipped with an ultrasonic sensor with a known detection range (sensing range) d. When the distance from sensor to target


The use of
Denote

3. Generalized Unscented Kalman Filter (GUKF)
To facilitate collaborated sensor signal processing, sensor nodes within the sensing range of the target dynamically form a cluster. A cluster head will be elected and a tracking algorithm will be executed in the cluster head. All other sensor nodes within the cluster will transmit their observations to the cluster head to facilitate tracking computation. It is assumed that there is no transmission delay or packet loss.
The traditional UKF formulation (TUKF) always treats the multiplicative noise as a signal dependent additive noise. To see this, let us express (3) in a matrix form


As Bayes rule, the joint distribution of random variables


For the two different measurement models (5) and (6), the GUKF where TUKF is where




From (10), the state vector and the state covariance matrix in GUKF may be updated as

Similarly, one can get the TUKF update equations:

In above equations,
The trace of the covariance matrix

In our early work [29], one theorem has verified that the GUKF yields more accurate estimate than TUKF under the multiplicative measurement model (5).
Theorem 1.
One has

Therefore, we will adopt GUKF as the tracking algorithm in this paper.
4. Energy Balance Criterion
When the cluster member nodes within the sensing range will transmit their readings
Network lifespan is an important metric of the cost of operations of the WSN, which specifies the time span during which a given task may be continuously performed at a prespecified quality by a network of sensor nodes.
Definition 2.
Sensor network lifespan

The network lifespan is related to the remaining energy of each node [30], as such one needs to balance energy dissipation among nodes in order to guarantee even residue energy distribution of sensor nodes. In [23], it is clearly indicated that, to extend the WSN lifespan, not only is the averaged amount of energy stored in individual sensor nodes important, but the variance of the energy distribution should also be considered. One theorem in [23] had shown that as the variance of energy distribution is minimized, the minimum residue on-board energy reserve will become larger, and the lifespan of the WSN will be extended [31]. Therefore, the variance of residue on-board energy reserve of sensor nodes is adopted to measure energy balance.
Definition 3.
Let

Theorem 4.
Denote by
In the early work [28], we first introduced a sensor energy consumption model for target tracking; the energy consumption of active nodes depends on the distances from the cluster head to themselves, since the positions of sensor nodes are known in advance; the amount of energy that would be consumed to transmit a packet from sensor node i to sensor node j, denoted by
We assume that the cluster head will have the current energy distributions of nodes within the sensing range. To realize this requirement, several issues must be considered.
Only active sensor nodes (including the cluster head) will consume considerable amount of energy. The energy reserves of sleep nodes may be assumed to be unchanged. The changes of energy amount at the active nodes can be easily deduced from the knowledge of target position, the cluster head, and the list of active nodes or equivalently sleep nodes. This information may be packed into an energy update data packet and transmitted to new cluster head. The current energy reserve of a sensor node should be made available to its neighboring sensor nodes within a radius equal to twice of the sensing distance. When an active sensor node is reporting its sensor measurement to the cluster head, it may also piggyback the message with its current energy reserve. The cluster head then will deduct the wireless transmission energy consumption from the reported value as an estimate of the residue energy at that sensor node. The cluster head will broadcast the estimated residue energy distribution and the energy updated data packet along with the target state and error covariance information to all sensor nodes within a radius of three times of the sensing distance from the target position. Each sensor node, upon receiving this information, will update the energy distribution of those active nodes within a radius of twice of the sensing range from itself.
5. Energy Balanced Scheduling for Tracking
In Figure 1, a target tracking scenario in a WSN is illustrated where Δ denotes a mobile target to be tracked. In the WSN, each sensor node contains a low power, low cost passive infrared (PIR) sensor as well as a high power ultrasonic distance measuring sensor. The PIR sensor will be turned on whenever the sensor node is active to detect the presence of a target within the sensing range of the current sensor. After the PIR sensor made a positive detection, the distance measuring sensor then will be turned on to estimate the distance from sensor to target. A practical system that provides such detecting measurements is used in our early developed platform [32].

A target tracking scenario in a WSN.
The tracking of a detected target will be managed by a cluster head of the cluster of sensor nodes within the sensing range of the target. The cluster head of the current time step is designated dynamically by the cluster head of the previous time step. As such, a cluster head node performs the following tasks.
To recruit sensor nodes within the sensing range of the predicted target position to participate in GUKF tracking in the current time step. To execute the GUKF tracking algorithm to update current target position with sensor measurements and to predict next target position. To update energy reserves of active sensor nodes and determine sensor nodes that should be activated by the next cluster head.
5.1. Cluster Head Selection
Give a set of active sensor nodes within the sensing range and assume that the energy reserves on every nodes are known. One of the active nodes will be selected to serve as the cluster head. Depending on distance between a sensor node and the cluster head, the energy required for wireless transmissions between them varies.
In this work, we argue that the cluster head should be selected such that the residue energy distribution after each sensor reports its measurement to the cluster head which should minimize the energy balance metric. If there are
One would want the averaged remaining energy
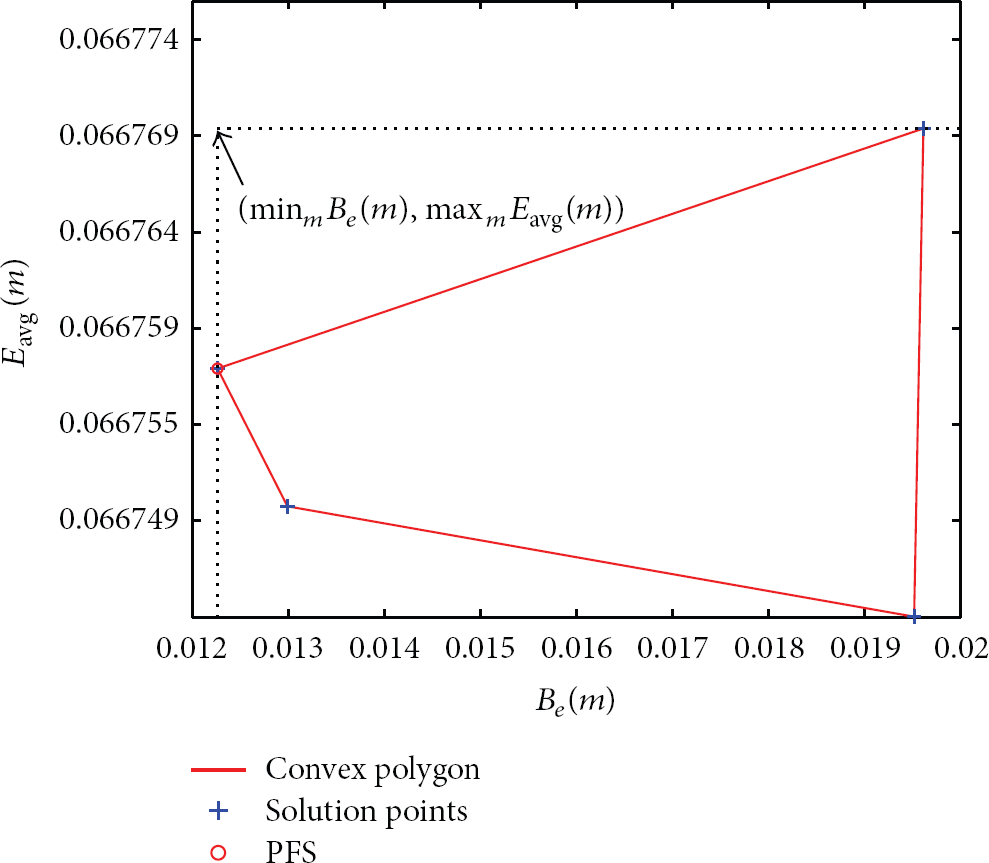
Pareto frontier of the cluster head selection.
5.2. Active Nodes Selection
In Section 5.1, the cluster head is selected among a given set of active sensor nodes. Generally, actuating multiple sensors can achieve better tracking performance but with high energy consumption. In addition, the signal-to-noise ratios (SNR) of nodes close to the target are higher than those of ones away from the target, so that scheduling these nodes near the target can contribute to better tracking accuracy. If there are enough adequate energy sensor nodes within the sensing range to guarantee the prespecified tracking accuracy, the set of active nodes must be chosen before the cluster head may be selected such that
5.3. Energy Balanced Scheduling Problem Formulation
As mentioned above, our goal is to schedule a subset of candidate cluster sensors located within the sensing range of the target to guarantee energy balance on the premise of tracking accuracy in order to prolong the network lifespan. Generally, an optimization problem is formulated to depict it as the following:

5.4. Proposed Heuristic Scheduling Algorithms
We know that energy balanced scheduling problem in (21) is a nonlinear multi-objective constrained optimization problem. Pareto frontier solutions are the optimal solutions for this problem as well; in this paper we introduce the Pareto frontier solution.
Definition 5.
When

Pareto frontier Solution of the active nodes selection.
Figure 3 shows a case for the Pareto frontier solution of the active nodes selection with
We have known that the computation complexity of exhaustive search algorithms (ESA) for PFS is Maximum Heuristic Algorithms (MHA). This heuristic algorithm can be described as follows. All ℓ nodes in the sensing range directly are chosen as the active nodes cluster. Then, the PFS computation complexity of this heuristic algorithm is Distance Heuristic Algorithms (DHA). The heuristic algorithm can be described as follows. Start the node closest to the target from ℓ nodes and add one node closer to the target at each iteration to form the active nodes list, in which a set of active nodes will be found such that Energy Heuristic Algorithms (EHA). The heuristic algorithm can be described as follows. Start the node with the biggest residual energy from ℓ nodes and add one node of bigger residual energy at each iteration to form the active nodes list, in which a set of active nodes will be found such that Comprehensive Heuristic Algorithms (CHA). The heuristic algorithm can be described as follows. Start the node with the biggest values calculated by the following equation: where

6. Simulation and Discussion
In this section, we evaluate and analyze the performances of the proposed scheduling algorithms through simulations. We conduct 100 Monte Carlo comparison experiments, respectively, using GUKF, TUKF tracking algorithms, and all of the proposed scheduling algorithms (including ESA, MHA, DHA, EHA, and CHA) under the MATLAB.
The energy model used in this paper is reported in the work [28]. The energy for transmission of b bits from sensor node i to sensor node j is
Other parameters and values used in our simulations.

6.1. Target Tracking in a Statical Environment
In this case, the initial energy of each node is different, as shown in Figure 5. The target only moves one step with a speed of 
As shown in Figure 4, there are

Target tracking under different scheduling algorithms.
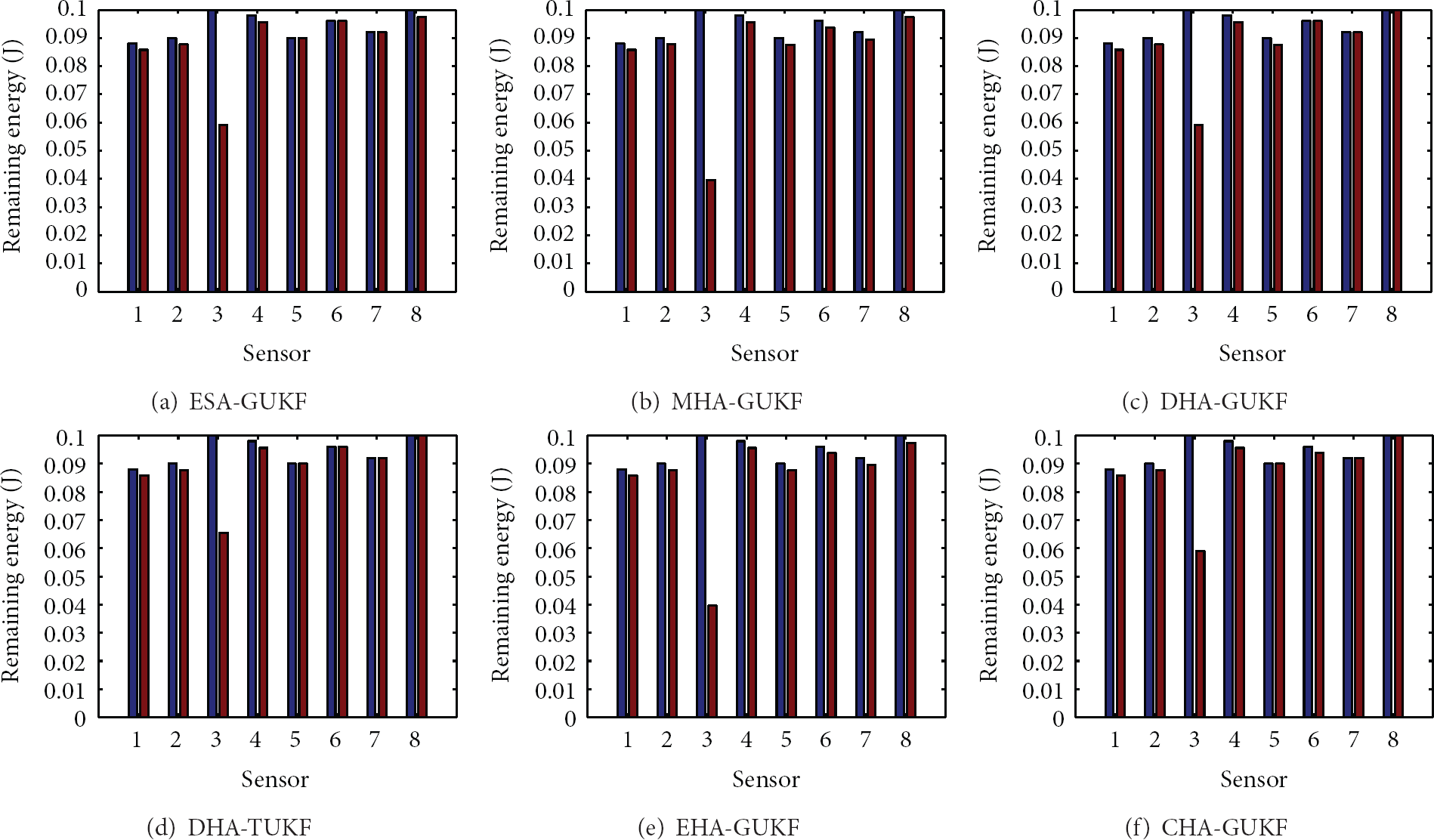
Node remaining energy under different scheduling algorithms.
Figure 5 shows the remaining energy of each node in the network under different scheduling algorithms at the two time steps Table 2 lists the active nodes selections, selected cluster head nodes, total consumption energy, energy balance metrics, and tracking accuracies as well as tracking errors under different scheduling algorithms at the next time step. We can see that MHA-GUKF schedules all the nodes within the sensing range, so the total energy consumption is the highest and its energy balance metric is also the biggest, but its estimation accuracy is the best among these algorithms. EHA-GUKF firstly schedules these nodes of bigger reserve energy like
Active nodes selections, cluster head nodes, total consumption energy, energy balance metrics, and tracking accuracies, tracking errors under different scheduling algorithms.

Figure 6 shows Pareto frontier solutions found by different scheduling algorithms adopting GUKF. It shows that PFS in CHA-GUKF is the closest to the ESA-GUKF, DHA-GUKF is closer, and PFSs in MHA-GUKF and EHA-GUKF are the worst. In particular, in the heuristic searching process of PFS under CHA-GUKF, we can found that PFS gradually converges to the optimal; this result indicates that our proposed heuristic algorithm CHA-GUKF is reasonable and effective.

Pareto frontier solutions (PFSs) found by different scheduling algorithms.
6.2. Target Tracking in a Dynamic Environment
The monitored area is 100 m by 90 m and covered by 50 sensors randomly and the initial energy of each node is set to 0.1 J. The target makes a straight linear and constant speed motion first and then arcs in the monitored area. The preset tracking accuracy 
Figure 7 shows the real and tracking trajectories of the maneuvering target under different scheduling algorithms; the tracking errors between real trajectory and tracking trajectories of the target as well as the active nodes number at each time step under different scheduling algorithms are, respectively, described in Figures 8 and 10. We can see that at the linear and constant speed scenario, because the state of the target is easily predicted, the tracking errors of these scheduling algorithms are almost the same. At the nonlinear scenario, the tracking errors in ESA-GUKF, MHA-GUKF, DHA-GUKF, EHA-GUKF, and CHA-GUKF that adopt our proposed GUKF tracking algorithm are much smaller than DHA-TUKF based on the traditional UKF tracking algorithm, and the tracking trajectory in DHA-TUKF diverges from the real trajectory. Specifically, the tracking error of MHA-GUKF is the lowest among these GUKF-based scheduling algorithms at the past time steps of the nonlinear trajectory; this is because MHA-GUKF is scheduling the maximal number of cluster nodes for tracking in this period, but which will consume so much energy, such that after then there is no energy-abundant node within the sensing range, the tracking error of MHA-GUKF is higher. In contrast, ESA-GUKF and CHA-GUKF always schedule enough active nodes, so their tracking errors are similar and the smallest. This result indicates that the proposed GUKF tracking algorithm is reasonable; CHA-GUKF heuristic scheduling algorithm can effectively and accurately track the target.
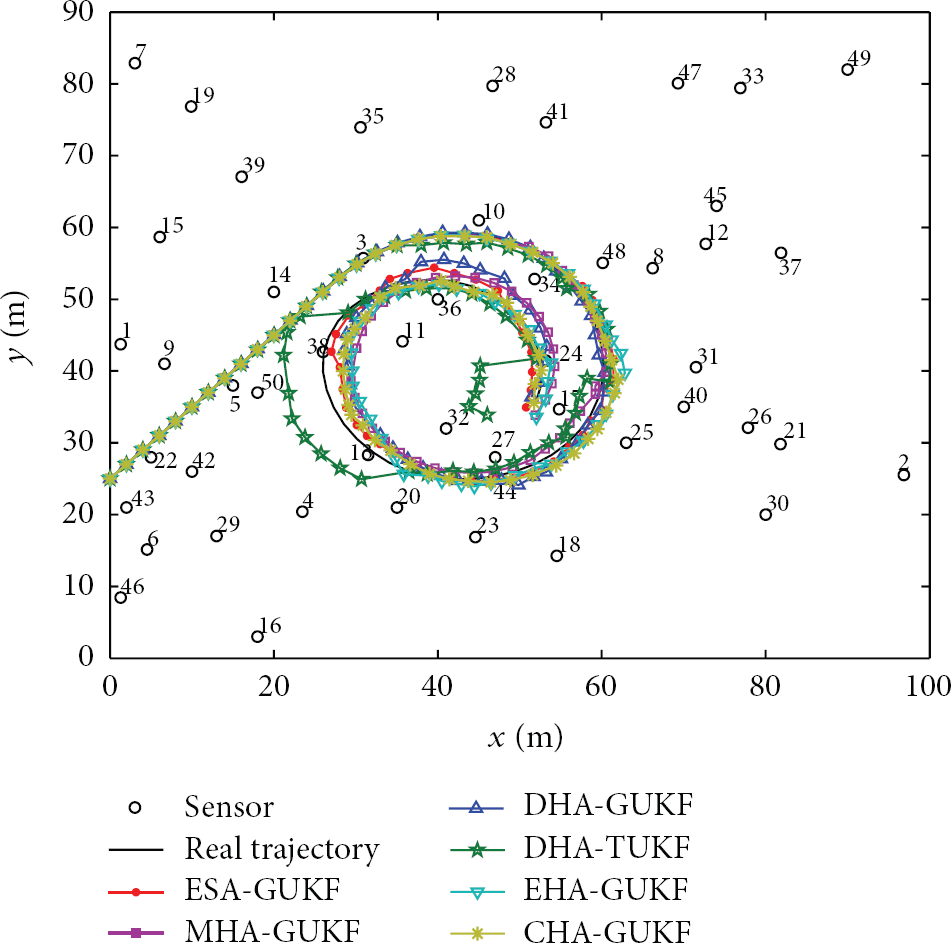
Tracking trajectories of the target under different scheduling algorithms.

Tracking errors comparison under different scheduling algorithm at each time step.
The traces of state covariance at each time step under different scheduling algorithms based on GUKF are shown in Figure 9. According to Definition 2, Table 3 lists the network lifespan, the minimal remaining energy of node, and the total consumption energy of each scheduling algorithm. Figure 11 shows the residual energy of each node in the network under different scheduling algorithms at the last time step. We can see that the remaining energy distribution of nodes is the evenest in ESA-GUKF and the minimal energy reserve of node is the biggest; the total energy consumption is the lowest and the lifespan is the longest. In MHA-GUKF, the total energy consumption is the highest and the network lifespan is the shortest. DHA-GUKF tends to select the nodes close to the target, such that these nodes
Total consumption energy, the minimal remaining energy of node, and network lifespan of each scheduling algorithm.


Traces of state covariance comparison under different clustering schemes at each time step.

Active nodes number at each time step under different scheduling algorithms.

Remaining energy of each node under different scheduling algorithms at the last time step.
7. Conclusion
In this paper, we consider a practical distance measurement model with the observation noise that depends on the state of the target estimated in a wireless sensor network. An energy balanced scheduling method for distributed target tracking with distance-dependent multiplicative observation noise is presented. This algorithm uses the energy balanced criterion to select cluster head and the subset of sleep nodes to extend WSN lifespan. This subset selection problem is formulated as a nonlinear multi-objective constrained optimization problem and an effective heuristic polynomial time algorithm is proposed. Simulation results confirm that the proposed heuristics algorithm can effectively extend the network lifespan while maintaining pre-specified tracking accuracy. The discussion in this work is limited to a single target case. Multiple targets scenario will be addressed in future works.
Footnotes
Acknowledgments
This work is supported by the Strategic Priority Research Program of the Chinese Academy of Sciences (Grant no. XDA06020201) and the National Natural Science Foundation of China (Grant no. 11174316, 61174070).