
Abstract
A directional sensor network is different from conventional wireless sensor networks. It uses directional sensors instead of omnidirectional ones in the network for different applications, and the effective sensing range is characterized by directionality and size-specific sensing angle. Therefore, conditions of directional sensor networks are dissimilar to those of generic wireless sensor networks for researches, especially on the sensing coverage. This study proposed a distributed approach to enhance the overall field coverage by utilizing mobile and direction-rotatable sensors in a directional sensor network. The algorithm makes sensors self-redeploy to the new location and new direction without global information by utilizing the features of geometrical Voronoi cells. Simulations were used to evaluate and prove the effectiveness of the proposed algorithm. The results show that the approach contributes to significant field coverage improvement in directional sensor networks.
1. Introduction
In a wireless sensor network (WSN) [1], the sensing coverage is always one of the key factors to ensure that sensing tasks will be well performed. The coverage ratio becomes a fundamental index of the measurement for WSN quality of service (QoS) [2]. Many studies related to the subject of WSN coverage have been successively proposed [3]. In recent years, directional sensor networks (DSNs) have drawn the attention of researchers. Differing from the conventional WSNs which use omnidirectional scalar sensors such as temperature or humidity sensors, a DSN is likely to be equipped with directional sensors such as image or video sensors. There are different problems and conditions regarding the coverage issues should be considered in the researches for DSNs due to the limited effective sensing range characterized by directionality and size-specific sensing angle [4, 5]. In the sensing field of a DSN, the sensing coverage depends on not only the location but also on the sensing direction and sensing angle of each sensor [6].
Although there are some studies concerning coverage of DSN [7], the problems and solutions are different. For example, several of the studies focused on the target coverage and several focused on the overall field coverage; several aimed at solving k-coverage problem and several aimed at solving prioritized region coverage. For another example, several studies considered the obstacles in a sensing field and several considered an obstacle-free sensing environment. This paper proposes a distributed self-redeployed algorithm to deal with the enhancement of overall coverage ratio in the sensing field of a DSN which consists of mobile and rotatable directional sensors. The characteristics of geometrical Voronoi diagram were utilized to determine the target positions and sensing directions of sensors and reduce the decision-making complexity. Using Voronoi diagram in this study was motivated by the following advantages: (1) Voronoi diagram exactly can be generated from a set of sensors and each sensor is associated with only one Voronoi cell; (2) the cell-based structure can help design a localized/distributed algorithm without global information; (3) each sensor can only check its own cell to examine the coverage hole; (4) both Voronoi vertices and edges can help make the decision of sensor position and sensing direction; (5) for a mobile sensor, the moving distance can be confined to the cell; and (6) the construction of a Voronoi cell is independent of sensing radii and angles; this helps a distributed algorithm be applicable to those sensors which have varied radii and angles. More detailed introduction of Voronoi diagram is described in Section 3.2.
The rest of the paper is organized as follows. Section 2 briefs the previous works related to DSN coverage. Section 3 describes the preconditions and assumptions. In Section 4, we provide the readers with our proposed scheme. Section 5 evaluates and analyzes the efficiency of the scheme. Finally, we conclude this paper in Section 6.
2. Related Works
There are four major categories of research subjects in WSNs [8]: (1) sensing coverage, (2) network connectivity, (3) network longevity, and (4) data fidelity. These subjects are also the fundamental requirements in DSN, but the existing WSN solutions or results are not completely suitable for DSNs, particularly the coverage issue. This is mainly due to that the directional sensors are characterized by working direction, angle of view (AOV), and line of sight (LOS) [9], and new solutions for the dissimilar problems are required [10].
In regard to DSN coverage problems, the related studies can be divided into two categories [11]: (1) known targets coverage and (2) region coverage. The former determines a subset of the sensors to attain coverage on the specific targets or positions, and the latter makes the sensors attain a full or certain ratio of sensing coverage in the task region. Concerning known-targets coverage, Chow et al. [12] proposed an algorithm to select multiple directional sensors for providing 360° complete monitoring of a target while one sensor can only cover a part of the target. Wang et al. [13] aimed at prioritized targets and used the genetic algorithm to obtain a minimum subset of directional sensors for covering all of the targets. Hsu et al. [14] proposed an algorithm to solve the problem of which the number of covered targets is maximized whereas the rotated angle of sensors is minimized. And concerning region coverage, Jing and Jian-Chao [15] used the coverage overlap between the adjacent sensors as the quantity of electric charge and then used Coulomb's inverse-square law to change the sensor direction for reducing the overlapped coverage. Liang et al. [16] aimed at DSNs with mobile sensors, so that sensors could move to appropriate positions and obtain a good total coverage. Guvensan and Yavuz [17] used a hybrid solution of mixing stationary sensors, motile sensors, and mobile sensors in a DSN to increase the sensing field coverage. Tezcan and Wang [18] considered the condition of obstacles within the sensing field and proposed an algorithm utilizing rotatable sensors to reduce the influence of obstacles on the coverage. Huang et al. [19] focused on the multimedia image sensor networks and proposed a virtual potential field-based method with the considerations of sensor direction and movement for the coverage enhancement. The virtual force causes the adjustment of angular magnitude to be a trouble in coverage problem; therefore, linear-relation-based algorithm (LRBA) and mechanism-based approximate algorithm (MBAA) was proposed. These algorithms need the process of pairing between two adjacent nodes and a defect exists in the algorithms. That is, some nodes could not find their respective paired partner. These isolated sensors cannot perform the algorithms for the coverage contribution. Ma and Liu [20] analyzed deployment strategies and proposed a group-based strategy, namely, grouping scheduling protocol (GSP) for satisfying given coverage probability requirement in a directional sensor network. It needs repairing processes if certain grouped sensors are incommunicable to the sink. This needs the deployment of more sensors; therefore, the average coverage ratio of the grouped sensors could be decreased.
Voronoi-based method has been utilized in WSNs, but it has not drawn much attention of researchers on the DSN coverage problems. Li et al. [21] proposed the Voronoi-based distributed approximation (VDA) algorithm to make sensors cover the Voronoi edges as more as possible. The study approximately considers that if most Voronoi edges are covered, then most area will be covered; however, this is not definite and may cause more coverage overlap. This paper proposes a new distributed approach to determine location and direction movements of the mobile and rotational sensors for obtaining significant coverage contribution in the DSN. In addition, the geometrical features of Voronoi cells with its vertices, edges, and included angles were utilized in the proposed approach to assist in the determination of sensor self-redeployment.
3. Preliminaries
3.1. Assumptions
There are several related studies [16, 21, 22] assume that all the directional sensors have the same sensing radius and sensing angle range, which means that the sensors are homogeneous. The algorithm proposed in this paper doses not have this limitation. It is applicable to sensors with different sensing radii and angles. But the general assumptions are listed as follows:
Each sensor is well aware of its coordinate by utilizing a certain localization technology [23]. Each sensor has enough communication range or multihop transmission capacity to transmit information to neighbor sensors. Sensors are rotatable; they can do a clockwise or counterclockwise rotation to change the working direction. Sensors are mobile; they can move within the sensing field. This assumption is not unrealistic in the real world [24, 25].
3.2. Voronoi Diagram
The Voronoi diagram is a computational geometry data structure with special characteristics [26], which is applicable to be utilized in the proposed algorithm to divide the sensing field into cells. The sensing field will be divided into Voronoi cells according to the initial positions of the deployed sensors, as shown in Figure 1. Given a set of n sensors Each sensor If a point p lies in the same cell as

Construction of the Voronoi cells.
Regarding the construction of a Voronoi Diagram, there are several algorithms to generate the diagram from a set of points, such as Bowyer-Watson algorithm with an
3.3. Directional Sensing Model
Figure 2 shows the direction-rotatable sensing model for the directional sensors in the proposed algorithm of this paper. The notations and parameters are listed in Table 1.
Notations and parameters for the directional sensing model.


Sensing model for direction-rotatable sensors.
The effective sensing field The Euclidean distance between The included angle (δ) between

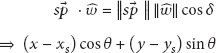

In brief, the directional sensing model shown in Figure 2 illustrates that a point
4. Distributed Voronoi-Based Self-Redeployment Algorithm
4.1. Problem Description
In a sensing field on which directional sensors were numerously and randomly deployed, it is difficult to obtain the optimal field coverage since partial regions are not covered and some regions are overlapped. The chief defect in using centralized algorithms to solve this problem is that the multihop transmissions over the network for collecting global information will be heavy on resources. On the contrary, a distributed algorithm does not need the global information, but only local information used for solutions. In addition, a distributed algorithm is more likely to make a real-time response or quick adjustment in changes of environment. Therefore, this paper proposes a distributed Voronoi-based self-redeployment algorithm, “DVSA” for short, to improve the field coverage ratio for a mobile and rotatable directional sensor network. And, it can be applied to sensors with different sensing radii and AoVs.
Each sensor constructs its own Voronoi cell according to the position information of their neighbor sensors after the initial deployment. By evaluating the suitability of each vertex with the parameters of cell structure and sensing model, one will be selected as the new location of the sensor (associated with the cell), and a new working direction also will be decided. The suitability evaluation aims to reduce the probability of coverage overlap across the cells. Figure 3 shows a schematic example of coverage comparison between the results before and after execution of the algorithm.

A schematic example of results before and after execution of the algorithm.
4.2. Target Location of Sensor Movement
Figure 4 shows an initially deployed directional sensor s and its associated Voronoi cell 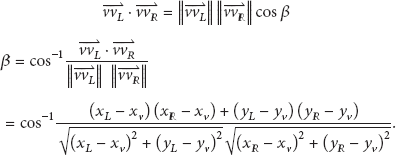

Included angle of a Voronoi vertex and related parameters.
The desired choice of a target vertex for the sensor movement is the vertex that its corresponding included angle is larger than or equal to the AoV of the sensor and the lengths of its two edges are larger than or equal to the sensing radius of the sensor. If there is more than one choice in this case, the vertex with the largest included angle is selected from the candidates, as shown as follows:



Results of choosing different vertices as the target location.
In this phase, each sensor in the DSN selects a suitable vertex from its own local Voronoi cell for obtaining a higher intracell coverage ratio. This will be beneficial to avoid coverage overlap across the cells as much as possible and keep higher overall coverage ratio of the sensing field. The detail of the algorithm for this phase is shown as Algorithm 1.
get self-coordinate ( broadcast receive coordinates from neighbors construct local Voronoi cell for each v( { let let if ( if else if else endif endif else endif } if (T2≠
ϕ
) else if (T1≠
ϕ
) else endif endif
4.3. Rotation of Working Direction
The target location of sensor movement is selected under the criteria described in previous section. After the directional sensor has moved to the suitable vertex on its local Voronoi cell, the next is to decide a working direction that the direction should be controlled to make sensor contribute to full intracell coverage as much as possible. By this rule, the coverage overlaps across the cells will be decreased, and it benefits the overall filed coverage.
Figure 6 shows an example model to control the working direction. The sensor is at the position of vertex v with coordinate (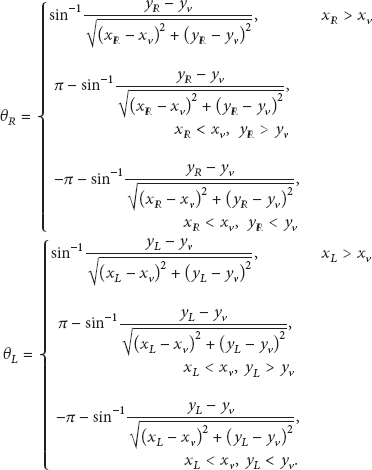

Rotation of working direction.
If the working direction rotates right toward the 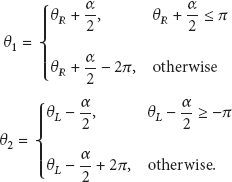
Figure 7 shows other two different cases in which 

Two other cases of direction rotation.
The detail of the algorithm for this phase is shown as Algorithm 2.
let let let function get_edge_angle_value { return } function get_rotation_range { return }
if ( rotate the working direction from else rotate the working direction from endif
4.4. Summary of the Procedures
This subsection summarizes the procedures of the proposed algorithm. As shown in Figure 8, there are seven major procedures in the proposed distributed self-redeployment algorithm. The procedures are performed in each sensor with only few local information (the coordinates). Global information is not required. After the procedures are finished, overall coverage of sensing field is improved and then the sensors begin to do their sensing works.
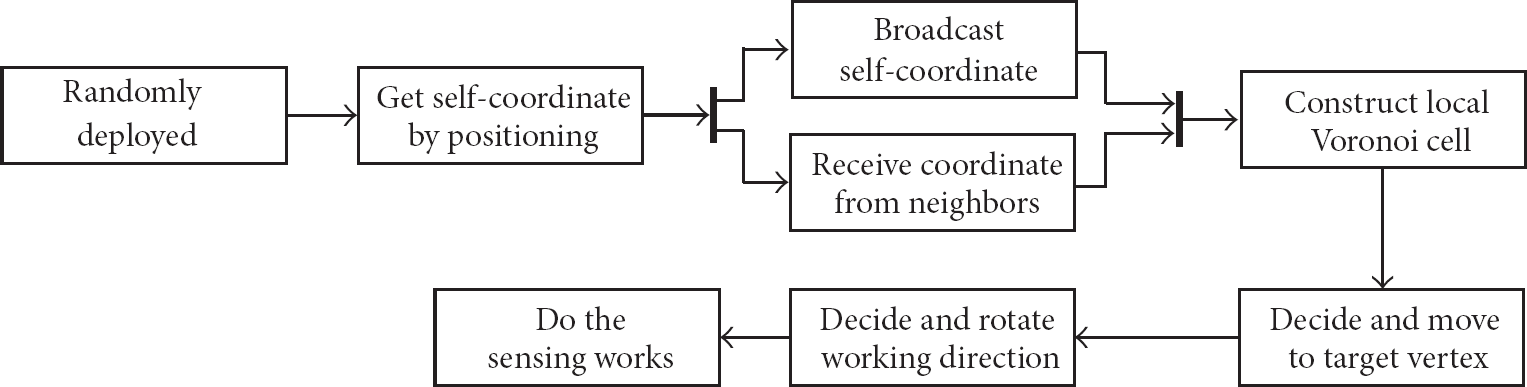
Procedures of the proposed self-redeployment algorithm.
Regarding the time complexity, the best known Fortune algorithm [27] can generate a Voronoi diagram from a given set of points in
5. Performance Evaluation
This study evaluated the performance of the proposed distributed Voronoi-based self-redeployment algorithm (DVSA) by simulations. Field coverage ratio is the problem concerned in the algorithm and it is the key point of the performance evaluation. In the simulations, mobile and direction-rotatable sensors are randomly deployed in a sensing field at the initial phase. The parameter of sensing field size is fixed at
There are variations in values of the parameters in the simulations. As shown in Table 2, the number of sensors is 50~150 with an interval of 20, the sensing radius is 10 m~60 m with an interval of 10 m, and the angle of view (AoV) is 30°~180° with an interval of 30°. Each case in the simulations was repeated 100 times, and the average was taken as the result data. The simulation results are described in the following subsections. And Figure 9 illustrates a result with pictures captured from the simulation program.
Notations and parameters for the directional sensing model.


Pictures captured from the simulation program.
Sections 5.1, 5.2, and 5.3 show the coverage performance of the proposed DVSA and the relationship among the number of sensors, sensing radius, and AoV. Then Section 5.4 shows the comparison with the other algorithms so as to prove that the proposed DVSA can improve the sensing field coverage well. Finally, Section 5.5 shows the performance result of sensors with different radii and AoVs; in other words, each sensor has a random radius and a random AoV different from the ones of the other sensors.
5.1. Coverage Ratio with Various Sensing Radii and AoVs
Figure 10 shows the results of simulation by changing the sensing radius (r) and the AoV (α), while fixing the number of sensors of

Coverage ratio (%) with fixed number of sensors (
Figure 11 shows the variation of effective coverage, which indicates the increments of coverage ratio relative to the initial ratio after deployment. It can be found that when

Variation of effective coverage (%) with fixed number of sensors (
5.2. Coverage Ratio with Various AoVs and Numbers of Sensors
Figure 12 shows the results of simulation by changing the AoV (α) and the number of sensors (n), while fixing the sensing radius of

Coverage ratio (%) with fixed sensing radius (
Figure 13 shows the variation of effective coverage of fixed sensing radius (

Variation of effective coverage (%) with fixed sensing radius (
5.3. Coverage Ratio with Various Numbers of Sensors and Sensing Radii
Figure 14 shows the results of simulation by changing the number of sensors (n) and the sensing radius (r), while fixing the AoV of

Coverage ratio (%) with fixed AoV (
Figure 15 shows the variation of effective coverage of fixed AoV (

Variation of effective coverage (%) with fixed AoV (
5.4. Comparison with Different Algorithms
The following show the results of comparing our proposed DVSA with the algorithms of VDA proposed in [21] and mentioned in Section 2. The RND (random) method has also been compared, which the RND means the initial value after the random deployment of sensors (with random position and random direction). Firstly, Figure 16 is the result by changing the number of sensors from 100 to 500, and the sensing radius and AoV are fixed at 50 m and 120°, respectively. The DVSA curve shows a significant improvement of coverage performance, which is better than both VDA and RND. At the value of
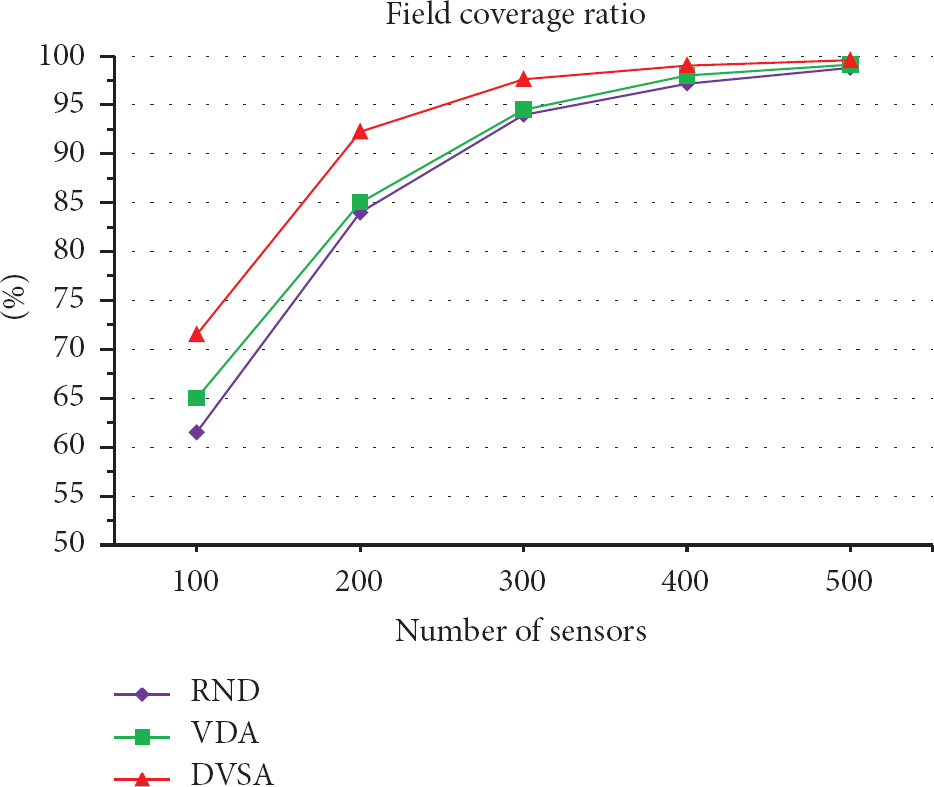
DVSA Compared with RND and VDA (

DVSA Compared with RND and VDA (

DVSA Compared with RND and VDA (
Figure 19 shows the coverage ratio of the proposed DVSA algorithm compared with the result presented in the related study [19]. The simulation parameters: the size of sensing field is 500 m × 500 m; the number of sensors is 100; the sensing radius is 60 m; and the AoV is 60°, which are the same with the ones in that study. In the Figure 19, it shows that the coverage ratio of the sensing field can be well improved by the proposed DVSA algorithm while being compared with the related algorithms.
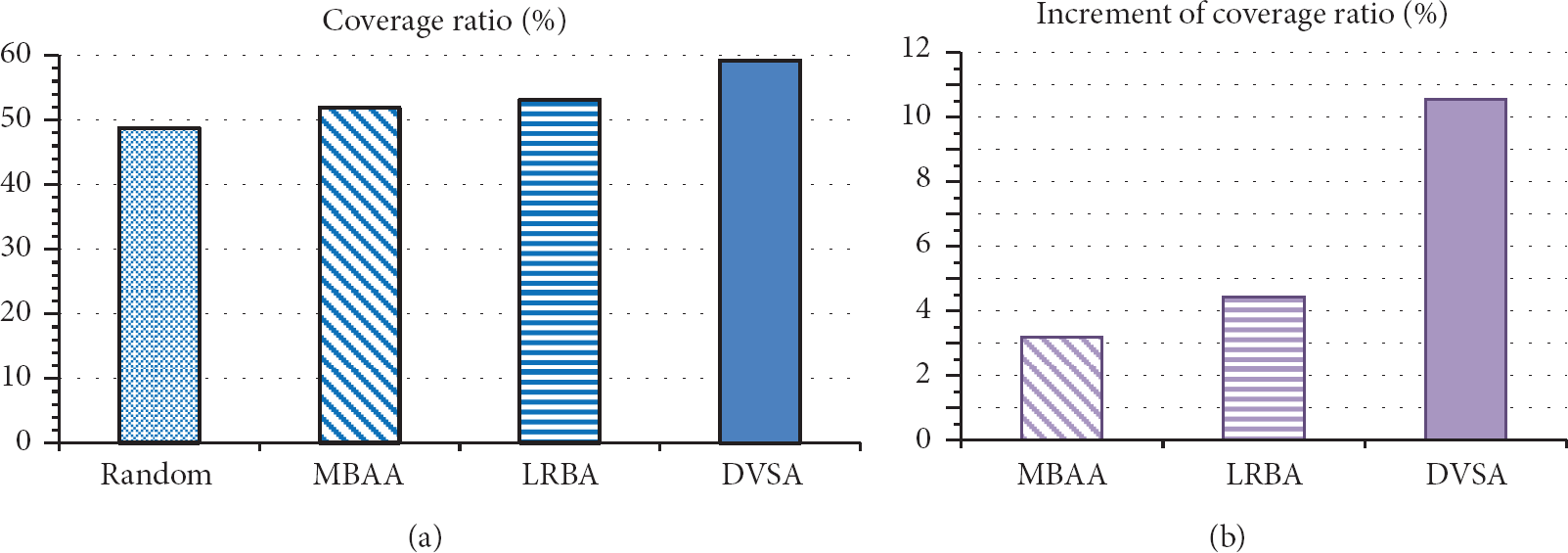
Simulation result compared with different algorithms (
Figure 20 shows the result of the proposed DVSA algorithm compared with the GSP algorithm presented in the related study [20]. This simulation uses a large number of sensors of
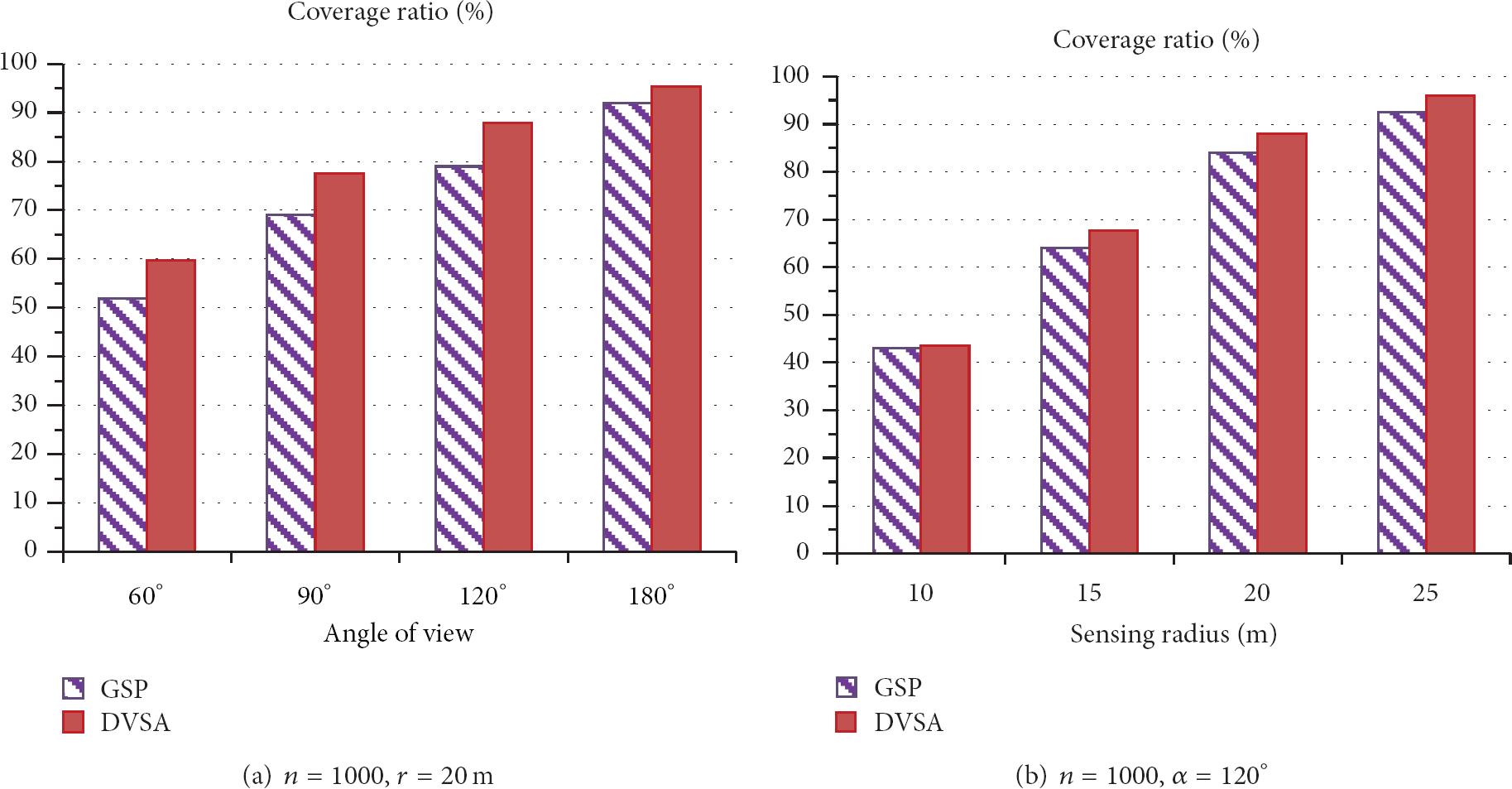
Simulation result compared with the GSP algorithm.
In summary, the proposed DVSA method utilizes the vertices, edges, and included angles in each Voronoi cell to precisely compute the most suitable location and working direction for each sensor according to the algorithms described in Sections 4.2 and 4.3. On the contrary, the VDA approximately considers that if most Voronoi edges are covered, then most area will be covered; this is not definite and may cause more coverage overlap. In LRBA and MBAA algorithms, some nodes could not find their respective paired partner and cannot perform the algorithms for coverage contribution. And in the GSP algorithm, it needs the deployment of more sensors for repairing processes if certain grouped sensors are incommunicable to the sink, and the average coverage ratio of the grouped sensors will be decreased. Accordingly, the above performance results show that our proposed DVSA performs better than the algorithms of VDA, LRBA, MBAA, and GSP.
5.5. Performance of Sensors with Different Sensing Radii and AoVs
In this subsection, the result of coverage performance of sensors with different radii and different AoVs is shown. In other words, the sensing radius and AoV of a sensor are randomly generated and different from the ones of the other sensors. Figure 21 illustrates this scenario with the pictures captured from the screenshot of the simulation program.

Pictures captured from the simulation program (initial versus DVSA).
The parameter of the number of sensors varies from 30 to 200. The sensing radius of a sensor is randomly generated with a range between

Performance (
6. Conclusion and Future Work
This study utilized the geometrical features of Voronoi diagram and the advantages of a distributed algorithm to propose the distributed Voronoi-based self-redeployment algorithm (DVSA), aiming to improve the overall field coverage of directional sensor networks effectively. The performance of the proposed algorithm and comparison with the different algorithm are also presented in the paper. The simulations prove that the DVSA method can improve the sensing coverage performance well.
Our future work will focus on combining the algorithm with an energy consumption model to give consideration to both coverage and lifetime performance in mobile and direction-rotatable directional sensor networks.
Footnotes
Acknowledgments
This work is supported by National Science Council of Taiwan under Grant no. NSC 102-2219-E-006-001 and the Research Center for Energy Technology of National Cheng Kung University under Grant no. D102-23015.