
Abstract
This work provides a distributed fault-tolerant event region detection algorithm for wireless sensor networks. The proposed algorithm can identify faulty and fault-free sensors and ignore the abnormal readings to avoid false alarm. Moreover, every event region can also be detected and identified. Simulation results show that fault detection accuracy (FDA) is greater than 92%, false alarm rate (FAR) is near 0%, and event detection accuracy (EDA) is greater than 99% under uniform distribution. FDA is greater than 92%, FAR is less than 1.2%, and EDA is greater than 88% under random distribution when sensor fault probability is less than 0.3.
1. Introduction
The wireless sensor network (WSN) is a novel technology developed in recently years [1–9]. A wireless sensor network (WSN) consists of a large number of sensors. These sensors are used to monitor environmental variations such as temperature, humidity, pressure, and concentration of chemicals. Sensors in a WSN have limited computation, communication, and sensing capabilities because they are low cost and energy-constrained. Moreover, sensors are often deployed in an uncontrolled and harsh environment. They are prone to be faulty and hard to maintain. Therefore, a fault-tolerant and energy-efficient algorithm is required for network operation [4, 10–13].
The communication protocol of a WSN is very important in order to reduce power consumption. Three general-purpose protocol architectures include direct transmission protocol [15, 16], routing protocol [17–19], and clustering protocol [1, 3, 7, 11, 20–24]. Clustering is a popular energy-efficient protocol in WSNs [3, 11, 21, 23]. It divides the monitored area into several clusters, and each cluster has a cluster head. A cluster head can be regarded as a local fusion center. Each cluster member will send its physical value or decision to its cluster head, and the cluster head can thus make data aggregation or data fusion to eliminate invalid values and report this result to the base station (BS). Significantly, the challenge of designing a clustering WSN is that a cluster head is easy to exhaust its energy, and hence the network will be out of control. Heinzelman et al. proposed the LEACH algorithm [11]. In LEACH, cluster heads are randomly chosen, and a self-organization procedure is performed. This protocol balances the energy load between sensors. Heinzelman et al. later proposed the improved centralized algorithm as LEACH-C [21]. In LEACH-C, each sensor takes its turn as the cluster head according to the remaining energy. Therefore, the energy load is more evenly balanced than that in the LEACH algorithm. Nocetti et al. proposed a clustering algorithm based on connectivity [23]. The efficiency of this algorithm can be measured by the number of clusters formed and the number of border nodes produced.
Chen et al. proposed a distributed fault detection algorithm in [25]. Each sensor compares the observed data with its neighbors and makes a local decision by majority of votes. Krishnamachari and Iyengar proposed a distributed Bayesian algorithm [26]. In this algorithm, faults can be detected and corrected, but it also introduces new errors. Wu et al. [14] proposed an algorithm to solve the fault-event disambiguation problem. They focused on two typical cases, the event regions with ellipses or straight lines as boundaries.
This work provides a distributed and fault-tolerant algorithm to extend the uses of fault-event disambiguation. It can identify not only faulty and fault-free sensors but also the region where the event occurs. Simulation results demonstrate that the proposed algorithm has high accuracy and low false alarm in any shape of event regions.
The rest of this paper is organized as follows. Section 2 defines the network model and fault model. Section 3 describes the algorithm. Section 4 makes some simulations and shows their results. Conclusion and future work are drawn in Section 5.
2. Network Model and Fault Model
For ease of reference, frequently used notations and definitions in this paper are listed in Table 1. Each sensor
Notations and definitions.
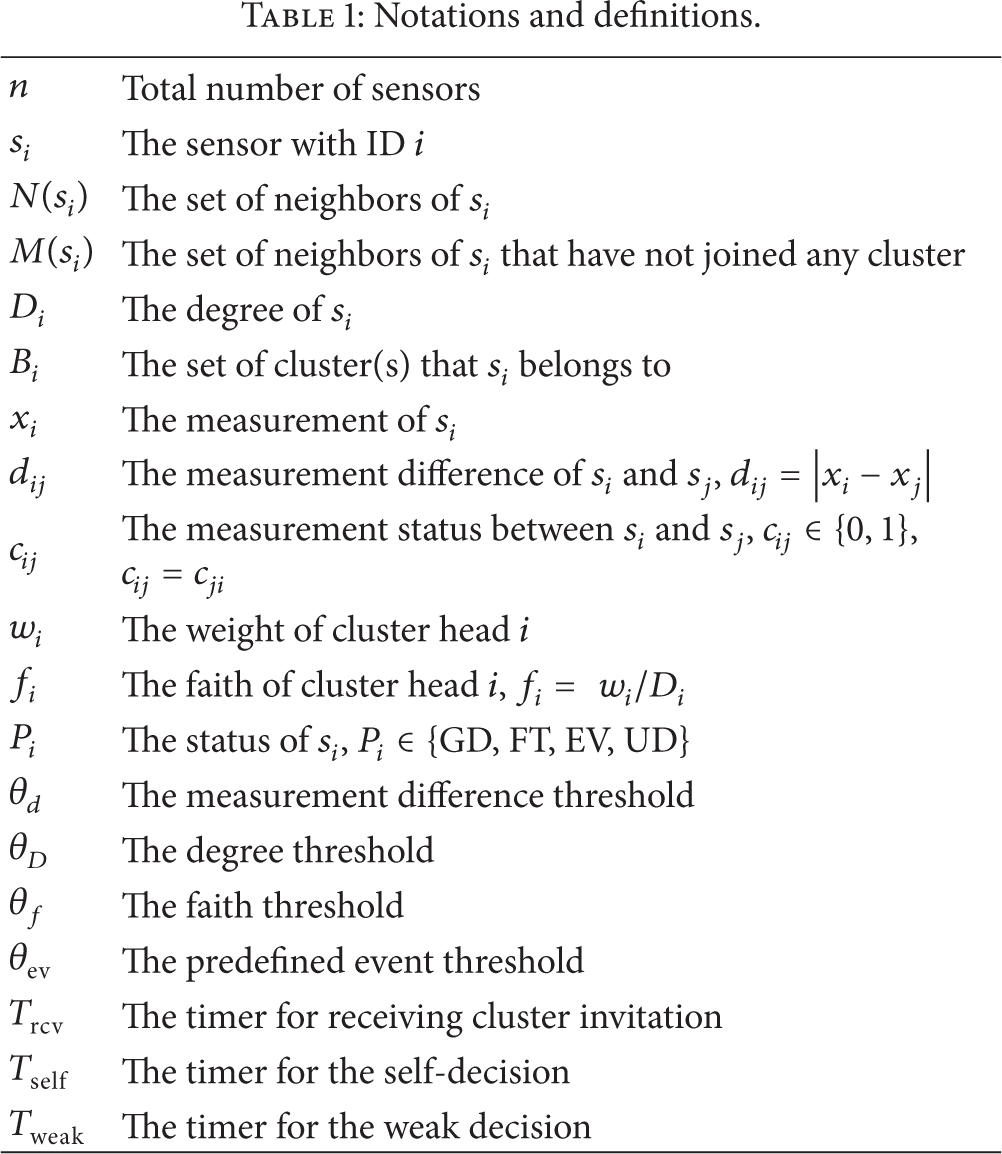
Notably, the fault model of this work assumes that computation and communication capabilities of each sensor always work properly. Three types of sensing fault are defined as stuck-at-maximum fault, stuck-at-minimum fault, and random fault. When a sensor is on the stuck-at-maximum fault, on the stuck-at-minimum fault, or on the random fault, it reports the maximum physical value, the minimum physical value, or a random physical value uncorrelated to the environment, respectively. These faulty sensors make the network unreliable and affect the final decision of the WSN. Therefore, a fault-tolerant algorithm to identify and isolate faulty sensors is designed in this work, and hence the precision of the event region detection is improved.
3. Proposed Algorithm
Assumes that the BS is capable of broadcasting a global message to sensors everywhere and each sensor knows its own geographical location either through GPS or RF-based beacons [27]. Each cluster head collects data from its cluster members. The data may contain abnormal readings. Therefore, this work provides an algorithm to identify those sensors that get abnormal readings. The proposed algorithm adopts the correlative relationship to distinguish event sensors or faulty sensors. Faulty sensors are likely to be uncorrelated, and sensors in the event region are spatially correlated. The algorithm is divided into two phases, clustering phase and decision phase.
Some other definitions are described as follows. If
3.1. Clustering Phase
The clustering phase starts when the BS broadcasts a clustering message to all sensors. In this phase, the monitored environment is divided into several clusters by cluster heads. Each cluster head can be regarded as a local fusion center. It collects information from its members and reports the fusion to the remote BS. Therefore, a well-designed clustering rule is to avoid chaotic situations such that a cluster head has no members or two cluster heads exist in the same cluster. The clustering rule of this work uses the degree of a sensor as the primary key and the sensor ID as the secondary key. At the first stage, each sensor exchanges degrees with its neighbors. Every sensor

The flow chart of the clustering phase.
3.2. Decision Phase
Initially, the status of each sensor is set to UD. This phase is divided into three kinds of decision: strong decision, weak decision, and self-decision. An important mechanism in this phase is that when sensor
3.3. Strong Decision
First, each member sensor

The flow chart of the strong decision.
3.4. Weak Decision
When

The flow chart of the weak decision.
3.5. Self-Decision
When

The flow chart of the self-decision.
Reclustering is an important approach in the self-decision. If a cluster head
4. Simulation Results
The simulation platform is a PC with Windows XPSP3, and the simulation program is developed in C#. The network parameters in this simulation are preset as follow. The transmission range of a sensor is between 2 m and 10 m. Thresholds
The result of the proposed algorithm will be compared with that of a recent algorithm for event boundary detection with faulty sensors in a WSN by Wu et al. [14]. For ease of comparison, the network setup is the same as that of Wu et al. 4,096 sensors are uniformly distributed in a 64 m × 64 m square region and represent an averaged summary of 100 runs. Figure 5 illustrates the FDA of the algorithm provided by Wu et al. and the proposed algorithm. Figure 6 shows the FAR of Wu et al.'s algorithm and the proposed algorithm.

The FDA of Wu et al.'s algorithm [14] and the proposed algorithm.

The FAR of Wu et al.'s algorithm [14] and the proposed algorithm.
Referring to Figure 5, the FDA of Wu et al.'s algorithm is slightly better than that of the proposed algorithm when average degree is between 20 and 50. This is because our simulation includes random faults, and random faulty sensors may catch random physical data near normal range (or event range), which are difficult to be correctly detected. Nevertheless, the FDA of Wu et al.'s algorithm is very inaccurate, while average degree is 10. In contrast, the FDA of the proposed algorithm remains close to 93% under various average degrees. The FARs of Wu et al.'s algorithm and the FAR of the proposed algorithm are illustrated in Figure 6. Undoubtedly, higher FAR always gets higher FDA. Obviously, our algorithm thus makes a significant improvement in FAR since it is almost 0%. The key point is that when a fault-free sensor
Figure 7 demonstrates that the FDA of our algorithm decreases smoothly with the sensor fault probability from 0.1 to 0.4 and average degree 10. Actually, a high degree network demands high cost and is not practical for a large scale network. Therefore, the proposed algorithm is more suitable for WSNs.

The FDA of our algorithm in a WSN with an average degree of 10.
Figure 8 shows the results of our algorithm that 250 sensors are randomly distributed in a 30 m × 30 m square region with average degree of 10, and the predefined event region is a square with side length 8 m located in the middle. The FDA is greater than 92%, the FAR is less than 1.2%, and EDA is greater than 88% when sensor fault probability is less than 0.3. Figure 9 illustrates the simulation result that the BS uses the convex hull algorithm to identify the event region. In Figure 9, red, black, and blue nodes indicate GD, FT, and EV sensors, respectively. The black circles are clusters, the green square is the predefined event region, and the purple polygon is the detected event region.
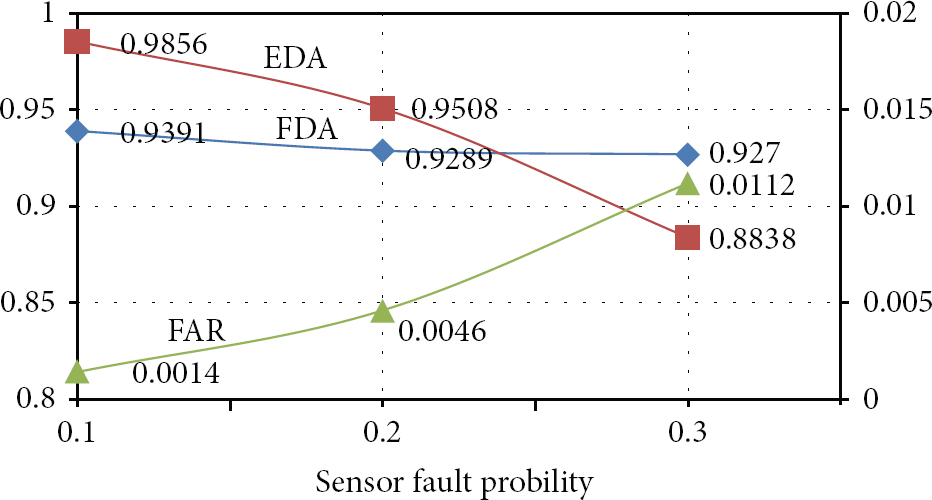
FDA, FAR, and EDA of our algorithm in a WSN when the sensors are randomly distributed with an average degree of 10.
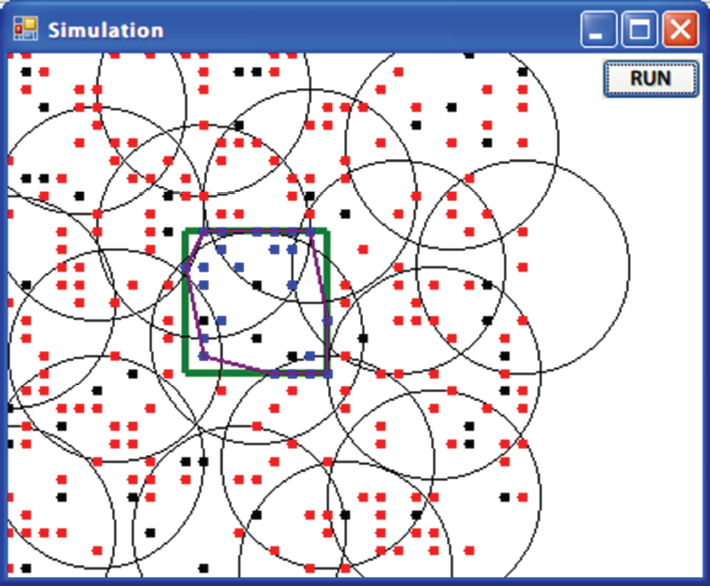
Convex hull algorithm is used to identify the event region at the BS. (Red: GD sensor; black: FT sensor; blue: EV sensor; green: the predefined event region; purple: the detected event region).
5. Conclusion
This work provides a distributed fault-tolerant algorithm for event region detection of WSNs to solve the fault-event disambiguation problem. It may be widely used in abnormal region detection. For example, sensors can be deployed in a forest by an airplane to discover promptly forest fires by monitoring the temperature around each sensor. The BS can identify the abnormal region based on the report of the cluster heads and send out a fire alarm signal. The proposed algorithm has high accuracy on event detection and low false alarm. Our future work will focus on power consumption and cluster head rotation to extend system life time. Moreover, to compute the best value of every threshold is our further research.
Footnotes
Acknowledgment
The authors would like to thank the National Science Council, Taiwan, for financially supporting this research under Contract NSC 100-2221-E-146-014.