
Abstract
The growing number of fatalities among miners caused by toxic gases puts pressure on the mining industry; innovative approaches are required to improve underground miners' health. Toxic gases are very often released in underground mines and cannot easily be detected by human senses. This paper investigates the presence of the inherent types of toxic fumes in critical regions and their suspension and trends in the air and intends to generate knowledge that will assist in preventing miners from contracting diseases. The development of intelligent decision support systems is still in its infancy. Knowledge of how to make them profitable in improving miners' safety is largely lacking. An autonomous remote monitoring framework of wireless sensor networks, which integrates mobile sensing and Ohm's law, coupled with ambient intelligence governing decision-making for miners, is developed. The framework has been investigated in indoor scenarios and successfully deployed for real-life application in an aeronautic engine test cell environment, such as those typically found in underground mines. Useful demonstrations of the system were carried out to provide similar knowledge to safeguard engineers from the inhalation of toxic gases. This provides early warning for safety agents. The system has proven to be suitable for deployment in underground mines.
1. Introduction
Efficient monitoring of concentrations of toxic gases in restricted areas, such as those typically found in mines, is regarded as a problem of special significance by the mining industry [1]. This challenge is significantly greater in an unstructured underground mining environment, such as a stope. A mine stope is formed as a result of repeatedly blasting hard rock from strategic sides with explosives. After mine blasting or other mining activities, such as drilling, construction, and barring, the underground terrains become restricted, unknown, unstructured, and particularly dangerous owing to the presence of poisonous explosive gases. The mine gases are highly concentrated and toxic, become a threat to both miners' health and the environment, and also limit visibility.
Figure 1 shows an example of a buildup and explosion of toxic gases, such as methane (CH4), nitrogen dioxide (NO2), and hydrogen sulphide (H2S) in an underground mine. The inhalation of an overlooked black damp in mines, which is a mixture of dust, carbon dioxide, and nitrogen [2], gradually overcomes and destroys the body's blood system, which may result in chronic diseases as a consequence of exposure to toxic gases. Research conducted in 2006 revealed a significantly elevated risk of leukaemia among German employees with a long occupational career in underground mines [1]. Several recent references to the incidence of mining-related diseases can be found in [3, 4].

A sample underground mine explosion due to the buildup of toxic gases.
It is therefore worth noting that, after blasting, miners currently have to wait outside the mines for a specified period of time for the poisonous gases/dust to dissipate. The question remains whether the gas/dust disappears completely in the air or merely reduces below that which the human nose can sense before miners enter the unsafe areas. Understanding of the density of the poisonous gases suspended in the air will assist in preventing miners from contracting dreaded diseases and is manifestly a sound basis for improving safety procedures in mines.
Predominant current efforts to monitor gas levels are focused on the use of [5] (i) lag/waiting time, (ii) mining ventilation, (iii) preparedness, and (iv) government regulations and agencies such as the Clean Air Act and Environmental Protection Agency in the USA. These promote activities that reduce air pollution. Each of these practices is successful for some environmental monitoring applications, but they require model intelligence. However, other efforts are being made to combat the problems of toxic fumes, such as the traditional fixed pollution monitoring stations measuring the air quality index, for example, the sophisticated equipment setups in Swansea [6] and in Ohio, USA [7]. They are highly sensitive and well calibrated, but the systems are operated with poor flexibility and expansibility, and the stations are expensive, which could be unaffordable for many developing mines and countries.
We seek a research solution to the deficiencies in the current monitoring approaches, which necessitate real-time sensing and decision-making through a wireless sensor network (WSN). WSNs are characterised by self-organisation, wireless communication, distributed, autonomous, and simple maintenance, which have applications in the research of environmental and underground monitoring systems [8]. This research focuses on making useful decisions on improving safety in restricted areas. The areas contain a roughly dynamic compartment whose sources of toxic gases have to be identified and remotely monitored for safety. Relatively little research has focused on providing methods for knowledge generation in WSNs that can support real-time collaborative decision-making on improving underground safety. The prevailing approaches often use structured query language- (SQL-) like primitives, and events are defined using a subevent list and confidence functions in SQL [9]. However, SQL is not appropriate for describing gas-sensing events in WSNs, as it (i) cannot capture data dependencies and interactions among different sensing scenarios, (ii) does not really support probability models, (iii) is inappropriate in describing complex temporal constraints and data dependencies, (iv) lacks the ability to support collaborative decision-making and triggers, and (v) does not facilitate any global analysis of the gas-sensing event system. In our previous research [10], a Bayesian belief network was used for environmental situation recognition in WSNs. The network was used in offline mode as a main representational structure of a ubiquitous sensor network, which only uses qualitative analysis for intelligence. However, we believe that crisp values for qualitative knowledge cannot adequately handle the often imprecise sensor readings. In this paper we demonstrate that using both qualitative and quantitative reasoning in real time significantly improves the knowledge generated.
In mining environments, network routing efficiency in WSNs stands out as a pivotal factor [11] beside other research problems. Recently, modelling the complexities of underground tunnel communication systems has been a key focus and has been extensively studied in [12, 13]. Long-distance WSN in [14] was applied in a coal mine by building on an integrated mine network. It was proved that it is suitable for a mine environment. We have studied different existing real-world scenarios where WSNs are being applied. Based on this study we have discovered that there are significant commonalities, but we do not know of any methodology that (i) provides detail of implementation for industry reproducibility and (ii) specifies the best practices that should be used in general, from the level of gas sensing up to decision-making in the case of this restricted area. As recommended in [15], newer frameworks need the extension of technologies to monitor complex toxic situations effectively. A real-time remote monitoring framework of WSNs and ambient intelligence based on temporal statistical methods governing decision-making for miners is developed for bridging the challenging gaps. The major contributions of this paper are as follows:
the development of a reactive remote monitoring framework based on real-time gas sensing, which spans physical layers through application space, by building on mine networks; the modelling of the theory in WSNs, Ohm's law, concepts of static and mobile robot sensing, derivations of curvilinear gas calibration equations, and ambient intelligence based on temporal statistical methods; the applications to monitor gases remotely in a real-life engine test cell, such as those typically found in underground mines, generating knowledge to improve safety with an assurance of assistance whenever required.
The rest of the paper is arranged as follows: Section 2 presents the background, which includes toxic mine gases, their physiological health effects, and the baseline mine network; Section 3 presents the proposed remote monitoring framework, which includes the sensor publishers, mathematical equations for gas calibration, and the ambient intelligence approach; Section 4 presents two experimental field setups; Section 5 critically presents experimental and comparative evaluations together with benchmarking of our proposed framework. We conclude the paper in Section 6.
2. Background
This section presents toxic mine gases, their physiological health effects, and the baseline mine network. The purpose is to provide the necessary knowledge to understand the requirements of the newly proposed framework fully.
2.1. Toxic Mine Gases and Physiological Health Effects
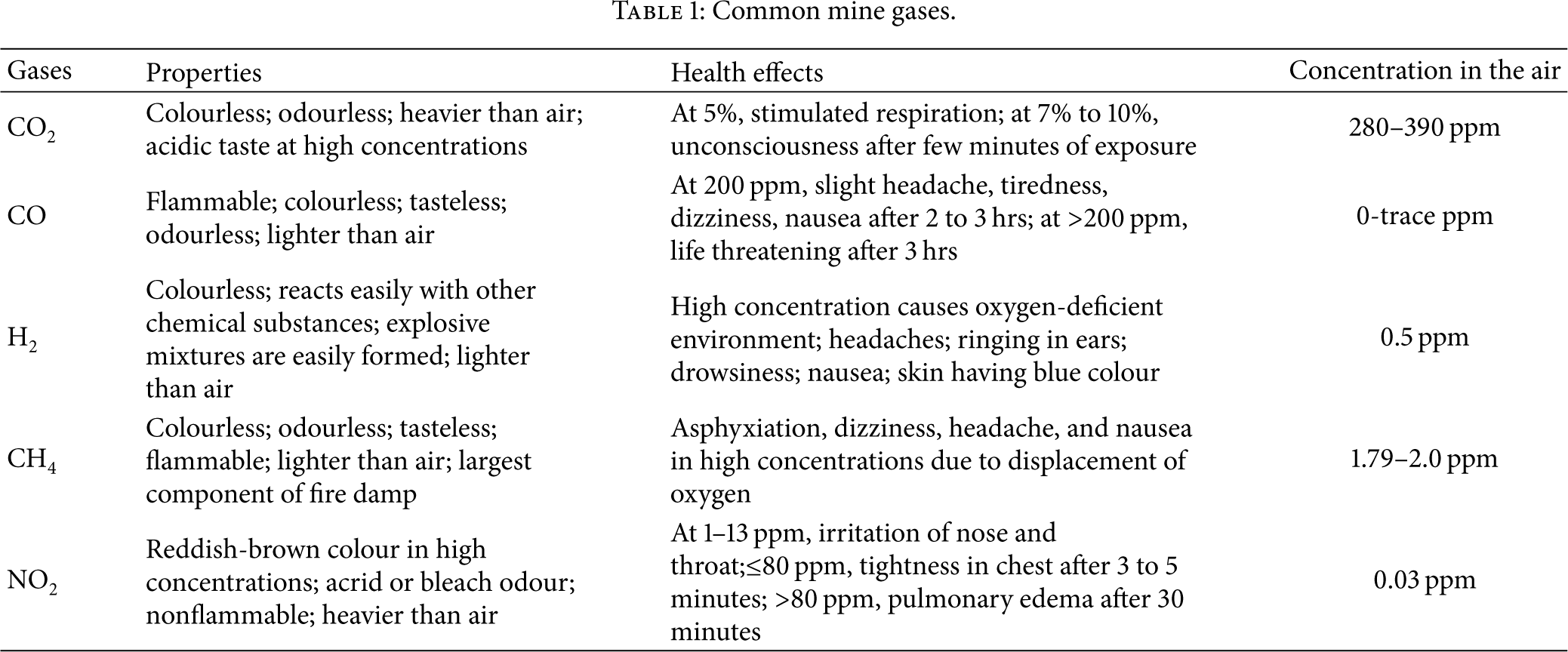
Table 1 presents some information about toxic gases commonly found in mine air. The knowledge is extracted from [16]. This information benchmarks our intelligence system to guide the early warning triggers.
Common mine gases.
2.2. Baseline Mine Network for Remote Monitoring
The integrated mine network proposed in [23] is intended for use as a baseline to connect with the proposed framework. The integrated mine network is composed of optical fibre as the main network through the shaft and uses WSNs in the roadway where monitoring is needed. The WSNs also connect other networks via gateway nodes, realising information interaction of aboveground and underground networks, as shown in Figure 2. The benefits of this mine network are as follows: (1) full usage of the existing network in the mine, which implies low maintenance, (2) no need for a WSN to lay lines for communication and power, which makes it more flexible, (3) sensor nodes that could be positioned optionally and compactly, making it possible to monitor stopes and any other areas in the mine, and (4) expandability of the network even when nodes and roadways are modified, making it convenient to monitor moving robot sensing in underground mines.

Integrated mine network.
In our approach, the network is intended for deploying the sensing nodes to identify toxic gases and sense what is happening underground. The inclusion of fibre-optic cabling through the shaft alleviates the challenges of no network coverage in underground tunnel regions. The fibre-optic cable communicates to a server or data-logger aboveground, which stores sensor readings for forward transmission to the Internet or network space, as used in Figure 3.
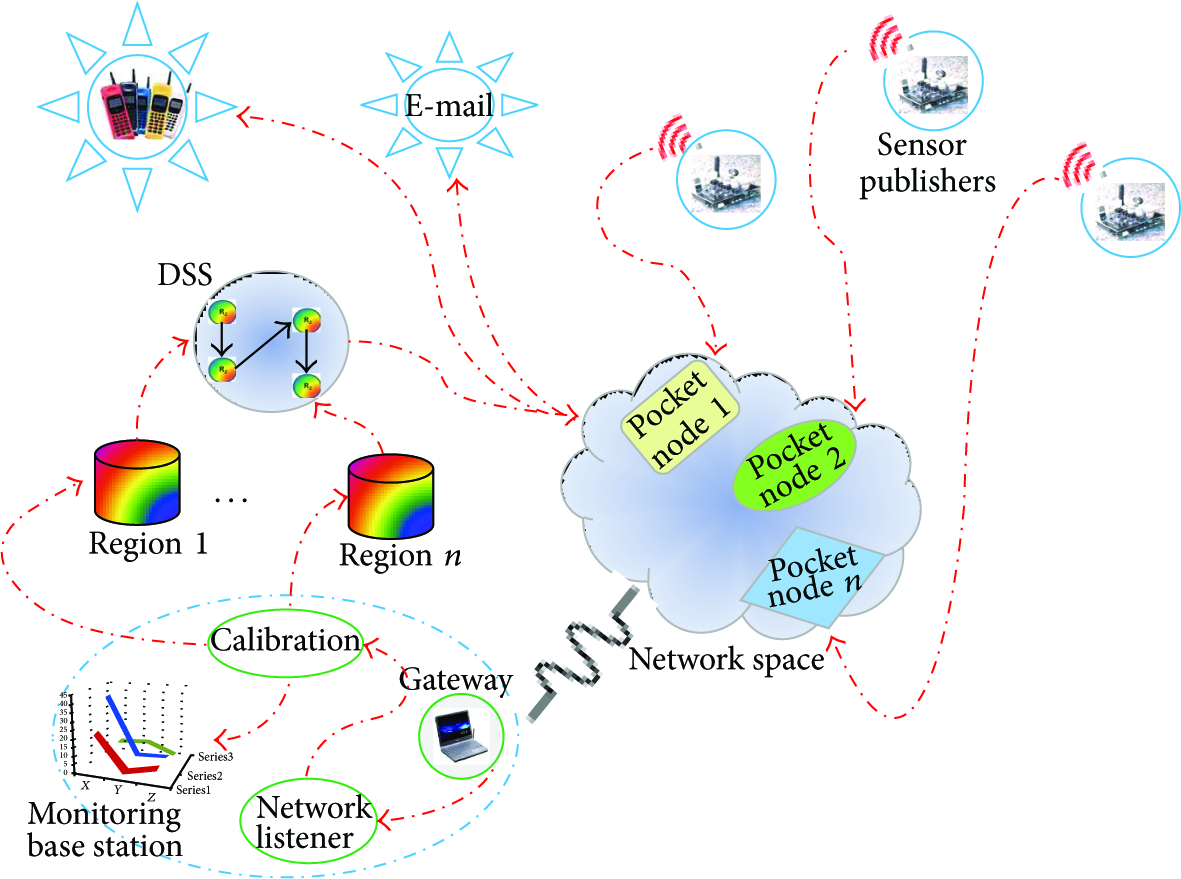
New remote gas monitoring framework.
3. Proposed Remote Monitoring Gas Sensing Framework
This section introduces the new reactive framework in Figure 3 for remotely monitoring toxic gases in restricted areas, such as those typically found in underground mines. It uses the WSN and ambient intelligence technology by building on Figure 2. The goal of this framework is to guide the monitoring of toxic gases in restricted areas through a set of well-defined nodes in its entire real-time system. As shown, the reactive system is divided into three major nodes: sensor publishers in Section 3.1, gas calibration in Section 3.2, and intelligent decision support system (DSS) nodes in Section 3.3. We expect the benefits of this framework to be numerous: (i) mobile robot sensing balancing between maximising the detection rate of gases and minimising the number of missed detections/unit areas, (ii) the timely detection and early warning of many common problems such as failing sensors, toxic fume levels hazardous to health in various regions, and potential gas explosions, (iii) an intelligent goal-directed decision-making process, (iv) an increase in coordination between the different working nodes on the framework, thanks to a clear division of responsibilities, and (v) the reproducibility of knowledge gathered from real-world WSN applications.
3.1. Sensor Publisher Nodes-Physical Layer
The sensor publishers, implemented as shown at the top right of Figure 3, collect gas data from different regions of an environment, which is necessary to understand the concentrations of the gases being monitored fully. This physical layer consists of an exhaustive design of the framework, which could include mobile sensing, shown in Figure 4(a). This is expatiated in the following.

Mobile robot and static sensing publishing gas packets to the gateway for integration into Figure 3.
Static and mobile robot sensing nodes provide an electronic “nose” on board, which includes an SD card slot and GPRS capabilities for sending an sms, and come in different communication flavours of Zigbee using the Xbee protocol. Zigbee can operate on line-of-sight or use the direct-sequence spread spectrum to penetrate barriers. The node uses a lithium battery, which can be recharged through a dedicated socket by a solar panel, allows extra sensors and GPS on board, and can transmit over a distance of 75 m. Low-level software programming is embedded onto different board circuitry, enabling wireless communication. Tagging each sensor board at this physical layer enables localisation of the source of various toxic gases, thereby making concurrent gas publishing onto the network space identifiable in Figure 4(b) as separate packet voltage (v) values. Thus, the network space aligns our framework with the integrated mine network, where the network space represents the Internet.
3.2. Mathematical Equations for Gas Calibration Nodes-Middle Layer
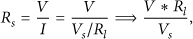
Every sensor used in gas measurement can be characterised by a specific response function or calibration equation relating the sensor output voltage (V) to a gas concentration normally measured in parts per million (ppm). The goal of this middle layer is to input the voltage and empirically generate the ppm that subsequent nodes in Figure 3 use. The raw gas measurements captured over the sensors are usually in millivolts (mV), and they are converted to V, obviously by dividing by 1,000. This needs to be converted back to the resistance of the sensor using Ohm's law [24] in

The linear regression model is expressed in (3) as


Power series:

Logarithmic:

Exponential:

Polynomial:

3.3. Ambient Intelligence Node for Decision Support System-Application Layer
Sensors are generally believed to be imprecise and not completely accurate even after the calibration process. To increase our confidence in the presence of uncertainty in toxic gas sensing, an intelligent DSS for reasoning over some periods of time is needed, as shown in Figure 3. One of the important tasks in our remote gas monitoring is sending early warning to safety officers through the real-time intelligence node based on temporal statistical models for reasoning on the imprecise gas sensor readings and allowing users interaction through the theory of situation awareness (SA) [10, 27]. We prefer the theory and the models because of ease in the interpretation of results, fast execution time, and scalability for large multidimensional data sets.
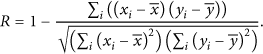
The objective of the SA was to guide safety officers through the decision-making process by detecting hidden patterns in the data captured over the WSN and revealing what is happening, why it is happening to the environment, what can be done to avoid unwanted behaviour, and what will happen next. In consolidating SA, we construct the temporal statistical mean, median, mode, standard deviation, and skewness in Table 2 for describing the situation of the toxic gases, while chi-square inference based on contingency table analyses relationships between parameters in multiple regions over time.
Temporal statistical methods used in real time.

As the toxic gases are observed over time, the statistical models change dynamically in values describing the location and variability of situations based on what is intended to be known in the regions observed. Since skewness measures the shapes of distributions, it characterises the degree of asymmetry of a distribution around its mean [28]. This means that, when skewness > 0 or < 0, the gas concentrations are clustered on one side, and when skewness = 0, they are distributed normally.
For analysing the relationships between gases, the following five stages are required: (i) a contingency table, which is a frequency between two or more variables, is first constructed, while independence between the variables is conducted by computing the expected values from the observed values using (10); (ii) a chi-square test and degree of freedom are then computed as shown in (11) and (12), respectively; (iii) a temporal probability (



4. Experimental Field Setups
Hypothesis 1.
Mobile sensing will not track the variability of gas concentration in air as well as static sensing over WSNs indoors.
In other words, it might not be necessary to implement mobile and static gas sensing over WSN indoors if it is known ahead of time that an environmental volume of air cannot be polluted beyond absorbable levels. To test the hypothesis, it is necessary first to establish different fields' setups, such as Figure 5(a) showing a cross-ventilation area and Figure 5(b) with no free flow of fresh air.

(a) Static sensing node 1 on a filing cabinet in an aerated office, 5 metres away from the monitoring station. (b) Sensing node 2 on a mobile pioneer robot at the printing and network server section, 10 metres and two doors (barriers) away from the monitoring station.
Hypothesis 2.
The performance of remote monitoring of gases in restricted areas over WSNs is not correlated to its performance in areas such as those typically found in underground mines.
An underground mine can be modelled in a more or less detailed fashion as a restricted area. For a mine consisting of multiple features such as wall barriers, the features would ideally need to be modelled separately. A real-life setup in two aeronautic mechanical engine test cells with dimensions 800 m3 and 650 m3 was used to test this hypothesis. Although it will not be able to reveal whether more accurate setups give better results in all cases, it will allow us to observe the effects of wall barriers encountered during transmission of gas packets outside the enclosed test cell, such as those typically found in underground mines. The good news is that our demonstrator does not rely only on line-of-sight for transmission, but also uses a direct-sequence spread spectrum to penetrate the barriers.
To assess the readiness of our system for underground mine deployment in terms of sensing some toxic gases and localising their sources, the following objectives are set: (i) performing ambient measurements assessing temperature, CO2, NO2, and CH4 buildup or distributions, (ii) getting a feel for the gas flow, (iii) picking up other possible fumes, and (iv) responding to environmental activities/events in the cell. Because of confidentiality in industries, the real-life engine test cell is presented as shown in Figure 6. A sensor node

A mechanical engine test cell, over 20 metres and four walls (barriers) away from Figure 4(b).
5. Experimental Results and Evaluations
From the ambient measurements, the six variables captured are quantitative data types where temperature is the warmness of the region measured in degrees Celsius (°C), and region values are in integers, while gases CO2, CH4, and NO2 are in ppm. The time step on the x-axis of Figures 8 and 9 is in seconds, and the interval between two time step units was set to 40 seconds. The last time step 80 on the figures implies that the sampling time or observations in the test cell took about one hour. The data model used in these experiments is in the form shown in Figure 7.
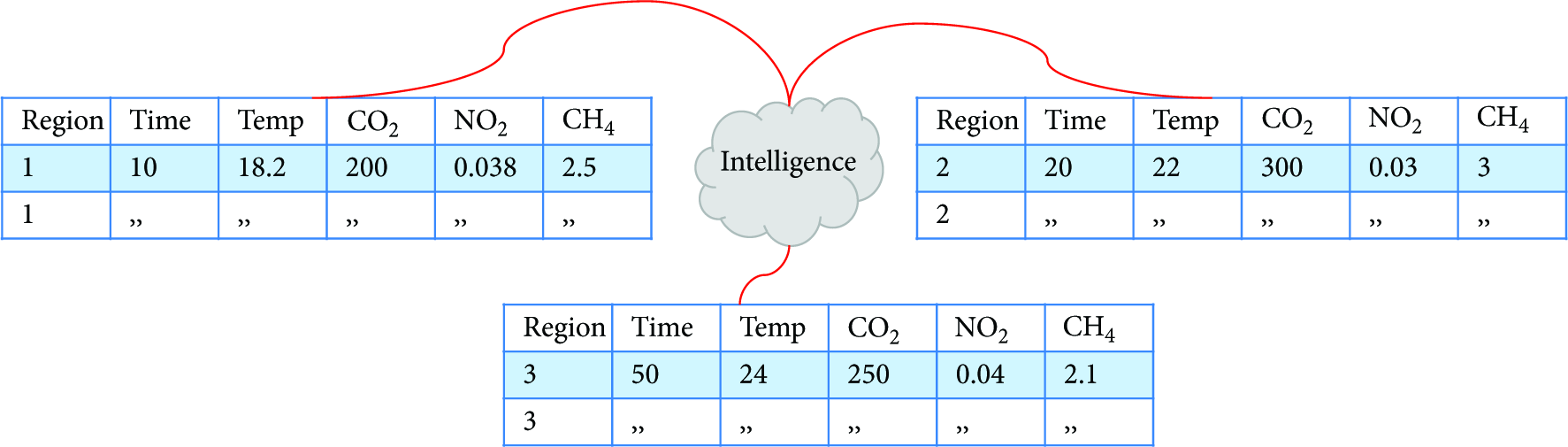
Sample gases data model and the ambient intelligence.

(i) Temperature at the top left-hand corners, (ii) CO2 and CO expected at the top right-hand corners, (iii) CH4 and H2 expected at the bottom left-hand corners, and (iv) NO2 at the bottom right-hand corners of (a) and (b).

(i) Temperature at the top left-hand corners, (ii) CO2 and CO expected at the top right-hand corners, (iii) CH4 and H2 expected at the bottom left-hand corners, and (iv) NO2 at the bottom right-hand corners of (a), (b), and (c).
Hypothesis 1 (indoor environments).
The static and mobile sensor nodes in Figure 5 capture the concentration of gases in the air, publish a stream of gases in voltages over the WSN onto a gateway subscription, and calibrate it into ppm, as shown in Figure 4(b).
5.1. Situation Awareness for Indoors-Qualitative Reasoning
The objective here is to assess the qualitative performance of the static sensing in a ventilated environment with the region 1 results shown over time in Figure 8(a), which exhibits noticeable differences when compared to the mobile sensing in an enclosed environment with region 2 results in Figure 8(b). In particular, the SA questioning paradigm in the following guides the safety officers through a decision-making process.
Decision-Making: Sample Qualitative Reasoning at Time Step 90.
Hypothesis 1 states that mobile sensing will not track the variability of gas concentration in air as well as static sensing over WSNs indoors. The qualitative results, however, show that it is not the case, implying that mobile sensing accurately captures the dynamism in region 2, as well as static sensing does in region 1.
Hypothesis 2 (mechanical engine field test cell).
5.2. Situation Awareness of Engine Test Cell-Qualitative Reasoning
The objective here is to access the qualitative performance of a restricted engine test cell for an underground mine. The underlying objectives are to assess (i) temperature and get a feel for its flow, (ii) CO2 and NO2 buildup, and (iii) other possible fumes.
Decision-Making: Sample Qualitative Reasoning at Time Step 80.
A3: The air extractor must be maintained and declared effectively before testing any engine. Q4: What will happen next? A4: Staying away from
5.3. Situation Awareness of Engine Test Cell-Quantitative Reasoning
From the real-time monitoring of the engine test cell, we specifically assess the quantitative performance of our ambient intelligence approach to consolidate the qualitative reasoning ranging from the use of temporal statistics to finding dependencies between parameters. We set and implemented five research questions in the following. These assist in sending early warning whenever hazardous observations are made over time, as indicated in Figure 6. We want to know the following over time.
q1: What is the level of health safety in each of the three regions in the engine test cell? q2: What concentrations of the gases are commonly sensed in most regions? q3: At what temperature levels are the gases' concentrations being sensed? q4: Are there any interesting events that could be picked up from the gases' distributions? q5: Is there any relationship between CH4 concentrations and the temperature of the region?
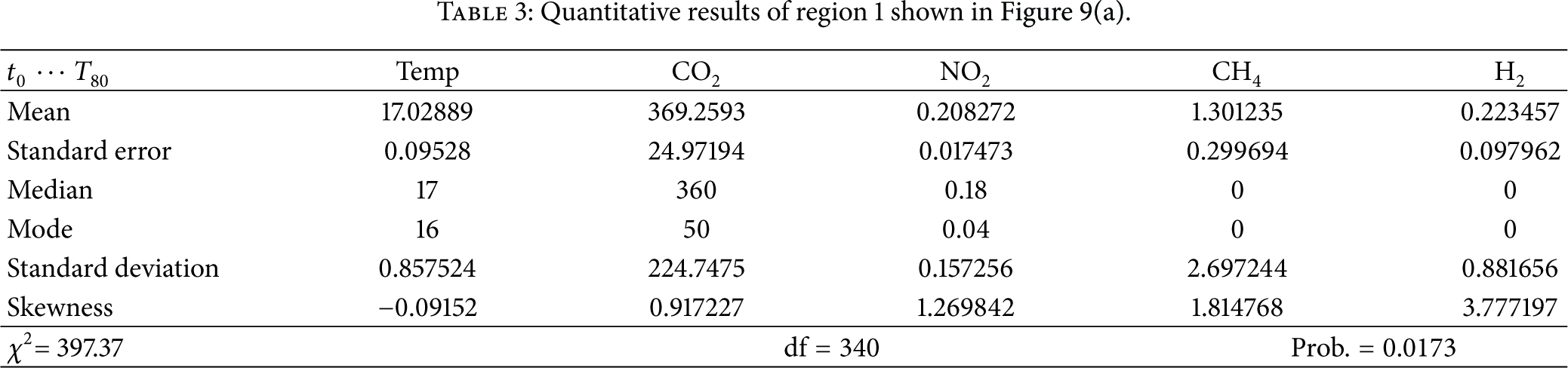
Having implemented the temporal statistical models, the results obtained at time step 80 in Tables 2–4 provide answers to the research questions and substantiate the qualitative results reflected in Figure 9. It can be noted that all observed results are quite accurate from a general standpoint, as most standard errors compared to the mean values are less than 5% in all regions.
Quantitative results of region 1 shown in Figure 9(a).
Quantitative results of region 2 shown in Figure 9(b).

An interesting observation that can be made from the engine test cell is that the air extractor inlet (
Quantitative results of region 5 shown in Figure 9(c).

At the 80th time step, concentrations commonly sensed in regions
The values of skewness in the three tables are greater or less than 0, showing clearly that events took place in the engine test cell: (i) three safety agents opened a door into/out of the cell, and (ii) a fire was ignited from a nozzle for tracing wind direction in the cell, leading to the detection of H2 gas in the process. This actually correlates with the results in Figure 9 and answers question
Since the degrees of independence or probability (of
There are diverse discoveries of knowledge that the system could reveal, but our main questions
5.4. Benchmarking Our Quantitative Reasoning with Publicly Available Observations and Methods
One of the ways to substantiate the reliability of our demonstrator is to benchmark its quantitative reasoning with publicly available air observations and methods. The Texas commission on environmental air quality captures hourly data collected, in particular, in the CPS Pecan Valley C678, Heritage Middle School C622, and Calaveras Lake C59 regions of San Antonio metropolitan area, USA, in [29]. The information is updated hourly, and it is officially certified by the technical staff. The air gas pollutants considered in this study are CO, SO2, and NO2, with different temperatures in an apparent one-hour time lag in the data. The sample data for August 25, 2012, was integrated into our temporal statistical models implemented in a Python distributed programming environment.
The temporal quantitative results obtained at time step 23 pm in Table 6 provide answers to most of the research questions, especially question q1 on the level of health safety in the metropolitan area, which the Texas commission provides for benchmarking. An interesting observation that can be made from the area is that the average of most of the gases suspended in air is fairly higher in the Heritage Middle School C622 and Calaveras Lake C59 regions, but lower in the CPS Pecan Valley C678 region. In Table 6, our temporal quantitative reasoning shows that the top region (CPS Pecan) is fairly safe when the mean values of the gases are compared to the acceptable values in air, except for NO2, which is 1.896 ppm. In the middle region in Table 6, the mean values of SO2 and NO2 gases increase to concentrations of 2.608 ppm and 1.658 ppm, respectively, making it manageable or fairly unsafe, except CO, which is within the acceptable range. For the bottom region, however, Table 6 shows relatively more NO2 with 1.642 ppm, making the region fairly unsafe/manageable, though other gases are not recorded. Although our early warning decision to the safety agents is very meticulous, one can see that our quantitative reasoning on the level of health safety is well correlated with the Texas air quality index (AQI) decisions. This answers the main question q1, which benchmarks the two methods and shows the reliability of our approach.
Benchmarking our approach with USA San Antonio metropolitan regions and its AQI method determining the health safety status.

5.5. Comparative Evaluations of the Proposed Framework with Other Related Methods
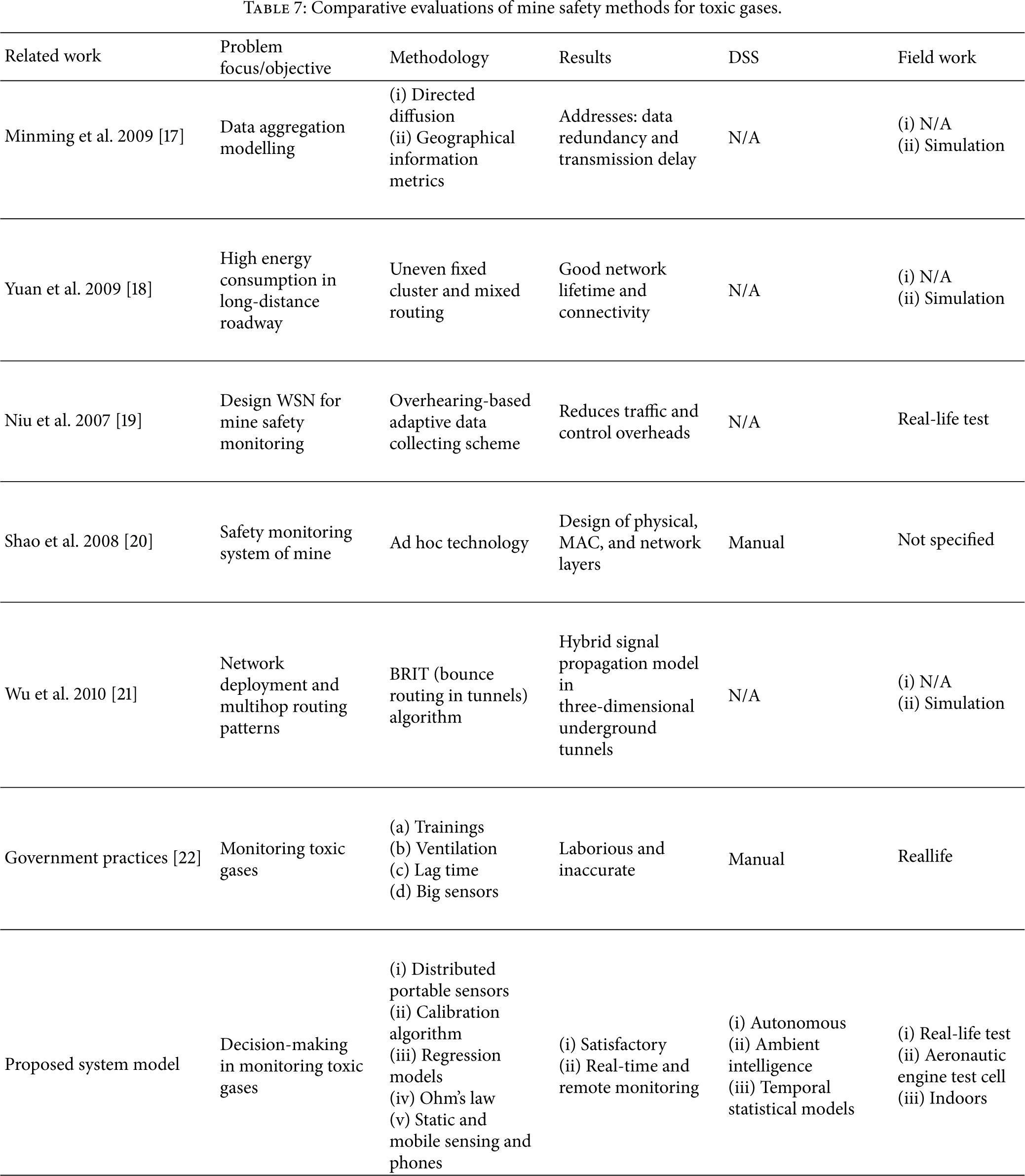
The evaluation of the contribution to mine safety using our proposed framework indicates that it is similar to the contributions derived from the related methods. A comparison of the related methods and the proposed framework is summarised in Table 7. The comparison and application of the related methods and the proposed framework to achieve mine safety and monitoring of toxic gases in particular show that our approach is comparatively complementary and building on the related baseline methods with regard to the following aspects.
Methodology: (i) the proposed system is a reactive remote monitoring framework developed for real-time gas sensing, which spans physical layers through application space; (ii) the modelling of the theory in WSNs, Ohm's law, concepts of static and mobile robot sensing, and derivations of curvilinear gas calibration equations are intended to achieve autonomy; (iii) our approach implements distributed sensors more cheaply than the big sophisticated sensors, which could be laborious to set up or expensive for developing mines/countries. Thus, every methodology in Table 7 is obviously driven by the problem focus. Decision support system: (i) integrating intelligent DSS with distributed WSN for remotely monitoring toxic gases builds on the baseline produced by the related methods; (ii) the ambient intelligence, based on temporal statistical methods governing decision-making for miners, works well with both qualitative as well as quantitative parameters; (iii) this decision-making technique is comparatively easy to use, as it is lighter than using computationally time-consuming algorithms that could be heavy weight, affecting our real-time system with time lag. Field work: (i) our approach monitors gases remotely in a real-life engine test cell, such as those typically found in underground mines, generating knowledge to improve safety with an assurance of assistance whenever required; (ii) knowledge of how to implement DSS and WSN approaches and how to make them profitable in improving miners' safety is demonstrated; (iii) the proposed model not only assists mine management/companies in doing simulations like most related methods, but has also done real-life field work indoors and in an aeronautic engine test cell, similar to those typically found in underground mines.
Comparative evaluations of mine safety methods for toxic gases.
6. Concluding Remarks
The study on remote monitoring of toxic gases targeting underground mines has analysed various aspects of using a WSN, SA, and temporal statistical models as ambient intelligence in an attempt to effect autonomous decision-making in real time. Some of the main conclusions that can be drawn from the experiments and analysis are as follows.
Every implementation node in our framework functions as well as the pioneer robot when all its parameters are configured appropriately. The experiments confirmed some of the claims discovered in the literature survey about toxic gases, Ohm's law, statistical methods, the theory of SA, and direct correlation of the properties of the engine test cell and underground mines. Even the simple ambient intelligence proposed, based on the temporal statistics, provides better results than common qualitative decision-making through consolidation. The chosen gas calibration equations may have considerable effects on the accuracy of the ppm results. It is assumed that the robot navigates moderately to add extra airflow to the sensing node as it perceives higher evident peaks.
While working on the research project, a number of possible variations on the experiments were considered, yet not implemented. These are listed here as topics for future research:
The approach of defining hypotheses before performing experiments has advanced researchers' knowledge in an intriguing approach to studying problems and their potential solutions. Thus, this is a directed research project affecting lives by improving health safety and therefore ready for deployment in underground mines.
Footnotes
Acknowledgments
The author gratefully acknowledges resources and financial support made available by the University of South Africa (UNISA) and the Council for Scientific and Industrial Research (CSIR), South Africa.