
Abstract
A multisensor data fusion approach for water quality evaluation using Dempster-Shafer evidence theory is presented. To evaluate water quality, each sensor measurement is considered as a piece of evidence. Based on the water quality parameters measured by sensor node, the mass function of water quality class is calculated. Evidence from each sensor is given a reliability discounting and then combined with the others by D-S rule. According to the decision rule which uses the fusion mass function values, the class of water quality can be determined. Finally, experiments are given to demonstrate that the proposed approach can evaluate water quality from uncertain sensor data and improve evaluation performance.
1. Introduction
Water quality evaluation is important in providing a reliable supply of potable water. Empirical evidence shows that water quality parameters, such as dissolved oxygen (DO),
Multisensor data fusion is a technology to enable combining information from several sources in order to form a unified picture [5]. It is an important tool for improving the performance of monitoring system when various sensors are available. Multi-sensor data fusion seeks to combine data from multiple sensors to perform inferences that will be more efficient and potentially more accurate than if they were achieved by means of a single sensor. During recent years, the multi-sensor data fusion technique has received much attention, but it is more about applications to target identification, signal and image processing, and biomedical engineering [6–9]. In this paper, we apply multi-sensor data fusion technology in water quality evaluation.
The main problem is that data obtained from sensors have different degrees of uncertainty [10]. This uncertainty may arise for a number of reasons. For instance, the sensing error increases with the age of sensor, and the sensor is disturbed by environment. The quality of the wireless links is another major limiting factor. Furthermore, this uncertainty may lead to conflicting conclusion. Since data obtained from the sensors is inherently incomplete, uncertain, and imprecise, it is imperative that a fusion mechanism be devised so as to minimize such imprecision and uncertainty.
Dempster-Shafer evidence theory (D-S evidence theory) and Bayesian methods are commonly used to handle uncertainty. The basic strategy of Bayesian methods is that if the prior probabilities and conditional probabilities are determined in advance, then the posteriori probabilities can be estimated using Bayes formula. Examples of applying Bayesian methods for multi-sensor data fusion can be found in [11–13]. Nonetheless, effective fusion performance can be achieved only if adequate and appropriate a priori and conditional probabilities are available. In some situations, assumptions can be made with respect to a priori and conditional probabilities, but these assumptions can turn to be unreasonable in many other situations. D-S evidence theory can be regarded as an extension of classical probabilistic reasoning, which makes inferences from incomplete and uncertain data provided by different independent sources. The application of D-S evidence theory in multi-sensor data fusion can be found in [14–17]. A key advantage of D-S evidence theory is its ability to deal with uncertain data without adequate priori probabilities.
This paper introduces a novel multi-sensor data fusion approach for water quality evaluation using D-S evidence theory. We view each sensor measurement as a piece of evidence that reveals some uncertain information about the water quality. And we get water quality evaluation through the fusion of uncertain data from each sensor. The rest of this paper is organized as follows. In Section 2, we introduce some preliminary concepts of the evidence theory. We present our multi-sensor data fusion approach for water quality evaluation using D-S evidence theory in terms of mass function based on water quality parameters, reliability discounting, and decision rule using the fusion mass function values. Section 3 describes experiments in which we demonstrate the effectiveness of the proposed approach. Section 4 provides some concluding remarks.
2. Water Quality Evaluation Using D-S Evidence Theory
2.1. D-S Evidence Theory
The D-S evidence theory originated from Dempster's work [18] and is further extended by Shafer [19] is a generalisation of traditional probability which allows us to better quantify uncertainty. The theory is based on a number of key propositions which are summarized as follows.
Frame of discernment: let Θ be a finite set of elements; an element can be a hypothesis, an object, or in our case a water quality evaluation. We refer to Θ as the frame of discernment; the set consisting of all the subsets of Θ is called the power set of Θ and denoted by Mass function: mass function m is also called a basic probability assignment function. It is defined as a mapping of the power set where Dempster's rule of combination (D-S rule): suppose where



2.2. Water Quality Evaluation
This section focuses on D-S evidence theory applications in multi-sensor environment and presents our implementation for water quality evaluation.
Consider a wireless sensor network with planktonic sensor node as shown in Figure 1, used to monitor and evaluate the water quality in a measurement area, for example, a lake or a pool. Each sensor node has several subsensors used to measure the water quality parameters. Let
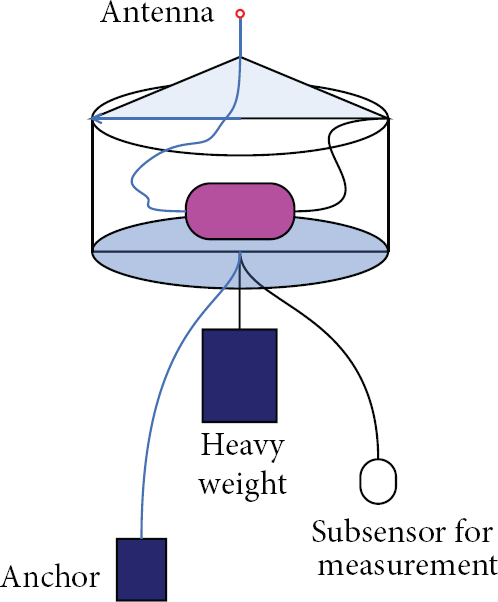
Planktonic sensor node model.
Assume N sensor nodes, for the sake of simplicity, and suppose that all sensor nodes are independent. Each sensor node measures water quality parameters

Water quality evaluation using D-S evidence theory.
According to the D-S evidence theory, for each sensor node, the possibility of water quality class can be described by mass function values.
2.2.1. Mass Function Based on Water Quality Parameters
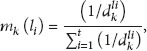
The derivation of mass function is the most crucial step in D-S evidence theory, because it determines the reliability of conclusions. In our approach, the calculation of the mass function is based on the water quality parameters provided by sensor node.
Let

Let

Intuitively, the more similar is
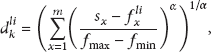
There are many measures for quantifying the distance between the measured parameters and the feature of water quality class. We propose to use the Minkowski distance measure, as follows:


2.2.2. Reliability Discounting
Some sensor nodes are more vulnerable to misreading or malfunctioning due to many factors, such as their age, their type, and their location. The impact of evidence is discounted to reflect the sensor node's reliability, in terms of reliability discounting

If its reliability discounting

2.2.3. Decision Rule Using the Fusion Mass Function Values
As stated earlier, all sensors are assumed to be independent. The multi-evidence combinatorial rule becomes
The current determined class of water quality should have a maximal mass function value and should be greater than a certain value; this value should be at least greater than The difference of the mass function values between the current determined class of water quality and other classes should be greater than a certain gate limit value, and here it is 0.2. The uncertain function value should be less than a certain gate limit value, and here it is 0.1.


If the three rules above are not satisfied simultaneously, the current class of water quality is uncertain.
3. Experiments and Results
In this section, we give two experiments to validate the performance of the proposed approach. In our experiments, we use the senor nodes developed by ourselves to measure water-quality parameters, as shown in Figure 3. The measured parameters include DO,

Sensor nodes used in experiments.
According to “Environmental Quality Standards for Surface Water of China GB 3838-2002”, water quality is categorized as 5 classes, and the features of all water quality classes are shown in Table 1. Thus, in our experiments, the frame of discernment for water quality evaluation is

Features of all water quality classes.

In the first experiment, we use three sensor nodes (
Water quality parameters measured by sensors

From (6), when 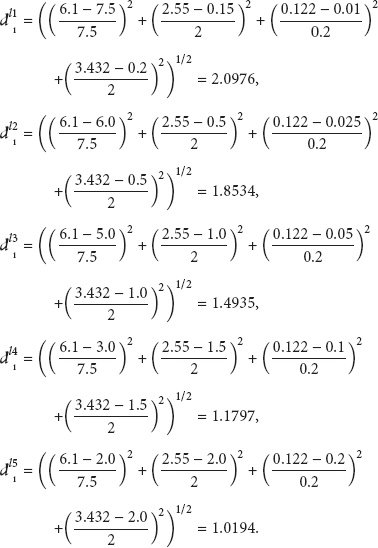
Mass functions from
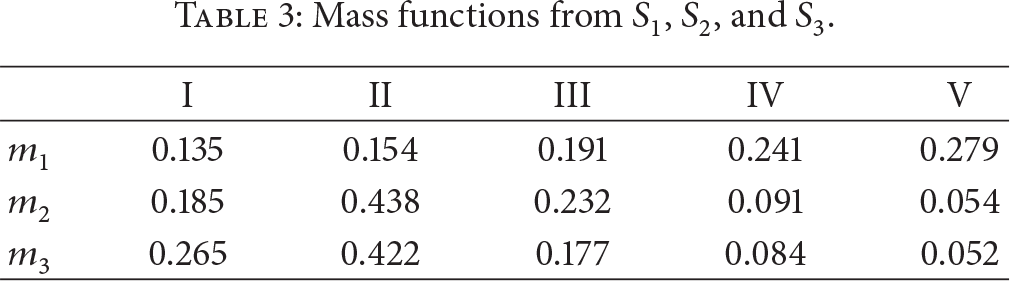
Suppose that the numbers of water quality evaluation from sensors
Modified mass functions and uncertain functions from

We can see from Table 2 that the water quality parameters measured by
Fusion mass functions and uncertain functions.

Then, consider the data of
We can see clearly from Table 5 that by comparing the fusion mass function value with the single sensor mass function value, the mass function value of the current determined water quality class is enlarged, while the difference of the mass function values between the current determined class of water quality and other classes is enlarged, and at the same time, the uncertain function value is reduced.
In the second experiment, we use different numbers of sensor nodes to monitor the water quality of a small lake at different time and different locations and use the approach of this paper to evaluate the water quality. Here we already know that water quality of this lake is the fourth class. The objective is to demonstrate that our approach could improve the accuracy of water quality evaluation. According to simulation, Table 6 shows the correct rate and uncertain rate compared between different numbers of sensor nodes used in multi-sensor data fusion for water quality evaluation.
Correct rate and uncertain rate with different sensor nodes combination.
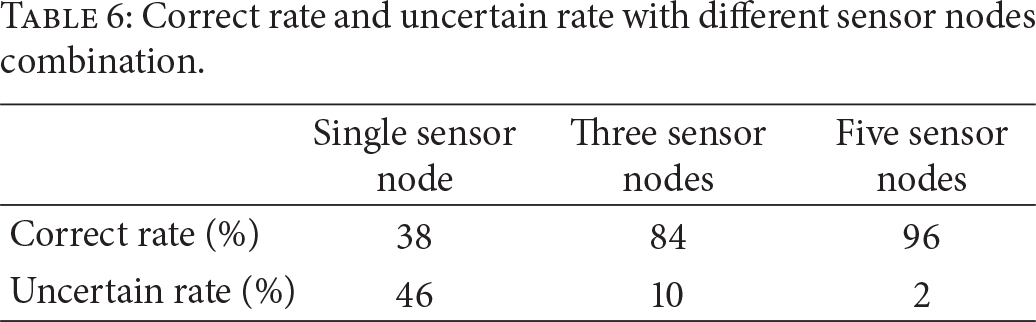
From Table 6, it can be seen that our approach can increase correct rate of water quality evaluation, compared to the approach using single sensor node. It can also be seen that the fusion can reduce the uncertain rate of water quality evaluation.
In summary, our experiments have indicated that the proposed multi-sensor data fusion approach for water quality evaluation using D-S evidence theory has improved water quality evaluation performance greatly.
4. Conclusions
We have applied multi-sensor data fusion technology in water quality evaluation in this paper. We have introduced a novel multi-sensor data fusion approach for water quality evaluation using D-S evidence theory. Within our work, we have proposed a method of calculating mass function based on water quality parameters and proposed a reliability discounting to reflect the sensor node's reliability. Furthermore, we have proposed the decision rule to determine the class of water quality by using the fusion mass function values. Our experiments have indicated that the proposed approach can evaluate water quality from uncertain sensor data, increase correct rate, reduce uncertain rate of water quality evaluation, compared to the approaches using individual sensors.
Footnotes
Acknowledgments
This work is sponsored by the National Natural Science Foundation of China (no. 71301081), Natural Science Foundation of Jiangsu Province (no. BK20130877, BK2012833), the Natural Science Foundation of Jiangsu Higher Education (no. 12KJB520011), and the Scientific Research Foundation of Nanjing University of Posts and Telecommunications (no. NY213035).