
Abstract
Ride quality and road holding capacity of a vehicle is significantly influenced by its suspension system. In the design process, a number of objective functions related to comfort and road holding capacity are taken into consideration. In this paper, the five-degree-of-freedom system of vehicle vibration model with passive suspension is investigated. This multiobjective optimization problem consists of five objective functions. Based on these five design objectives, this paper formulates four two-objective optimization problems by considering four pairs of design objectives and one five-objective optimization problem. This paper proposes the use of the improved compressed objective genetic algorithm (COGA-II) with convergence detection. COGA-II is intentionally designed for dealing with a problem having many optimized objectives. Furthermore, the performance of COGA-II was benchmarked with the multiobjective uniform-diversity genetic algorithm (MUGA) utilized in the previous study. From the simulation results, with equal population sizes, COGA-II employing the convergence detection for searching termination uses less numbers of generations for most sets of design objectives than MUGA whose termination condition is defined by the constant maximum number of generations. Moreover, the solutions obtained from COGA-II are obviously superior to those obtained from MUGA regardless of sets of design objective.
1. Introduction
Quality of ride of a vehicle is considerably influenced by its suspension system, road surface roughness, and speed of the vehicle [1]. The road surface roughness and speed of the vehicle are beyond vehicle design process. Therefore, the suspension system must be designed with optimum vibration performance. The primary performance measure of a suspension system is traditionally measured in terms of ride quality. The two principal variables for design and evaluation of the suspension system are sprung mass which determines ride comfort and suspension deflection which indicates the limit of the vehicle body motion [2].
Li and Kuo [3] presented genetic algorithm (GA) and evolutionary programming (EP) for determining a set of optimum system parameters for a passive suspension system. In their study, fitness functions are sprung mass acceleration, suspension deflection, and tire deflection in frequency domain. The fitness functions were combined to form only one criterion by weighted sum. They showed that the solutions obtained from GA and EP can provide good ride comfort and road holding ability.
Bouazara and Richard [4] studied an eight-degree-of-freedom three-dimensional vehicle model with three types of suspension—active, semiactive, and passive. They tried to compromise comfort and road holding capacity criteria. All design objectives were weighted and added together in order to form only one compromised objective. Therefore, they used single-objective optimization to obtain an optimum solution.
Alkhatib et al. [5] applied GA for solving the optimization problem of a linear one-degree-of-freedom (1-DOF) vibration isolator mount. They employed GA to solve a linear quarter car suspension model. They found an optimal relationship between the root mean square (RMS) of the absolute acceleration and the RMS of the relative displacement. The optimum solution was obtained numerically by utilizing the GA and employing a cost function that seeks to minimize the absolute acceleration RMS sensitivity to changes in relative displacement RMS. They found that the GA can increase the probability of finding the global optimum solution and avoid the convergence to a local minimum which is a drawback of gradient-based methods.
Gündoğdu [6] used GAs for optimization of a four-degrees-of-freedom quarter car seat and suspension system to achieve the best performance of a driver. There are four design objectives to be optimized, namely, head acceleration, crest factor, suspension deflection, and tire deflection. The design objectives were transformed to only one mixed objective function according to the global criterion method [7]. Therefore, single-objective GAs were used in the optimization process.
Nariman-Zadeh et al. [8] proposed the multiobjective uniform-diversity genetic algorithm (MUGA) with a diversity mechanism called the ∊-elimination algorithm for optimization of a five-degree-of-freedom vehicle vibration model having five design objectives. The design objectives are seat acceleration, forward tire velocity, rear tire velocity, relative displacement between sprung mass and forward tire, and relative displacement between sprung mass and rear tire. There are two sets of problem under consideration. First set contains four two-objective problems, meanwhile, the second set is five-objective optimization problem. The design objectives were optimized simultaneously without the combination of design objectives as the previous works [4, 6].
In optimization process, there are two main optimization approaches, derivative-based and derivative-free methods. Compared to the derivative-based schemes, the derivative-free methods do not need functional derivative of a given objective function. They, instead, rely on repeated evaluation of the objective function and obtain the search direction under nature-inspired heuristic guidelines. Although the derivative-free schemes are generally slower than the derivative-based methods, they are much more effective for complicated objective functions and combinatorial problems as the methods do not require differentiable objective functions. GA is a derivative-free population-based optimization method of which search mechanisms are based on the Darwinian concept of survival of the fittest. Originally, the GA is established to solve single-objective optimization problems (SOOPs) [9, 10]; subsequently it is adapted to solve multiobjective optimization problems (MOOPs) which have a number of objective functions to be minimized or maximized.
There are two approaches—weighted-sum and Pareto-based approaches that are used as multiobjective optimizers. In the weighted-sum approach, the classical multiobjective optimization approach, all objectives are weighted and added together in order to form a single objective. Thereafter a single-objective optimizer is used to solve this newly formed single-objective problem in the usual way to obtain one optimum solution. There are a number of previous researches [3, 4, 6] that utilized the weighted approaches for multiobjective optimization of vehicle vibration models. However, the solutions obtained from this approach tend to have an extreme value for some objectives. Meanwhile, solutions with objective values which are not extreme tend to be left out especially in the nonconvex multiobjective optimization problems [11]. This is a weak point of the weighted-sum approach; on the other hand, a multiobjective genetic algorithm (MOGA) based on the Pareto approach does not have such weak point.
In general, it is almost improbable that only one solution can optimize all objectives for a given MOOP. Based on the Pareto approach, the multiple optimum solutions of the MOOP—the Pareto optimal solutions—are used in decision making process. Solutions of MOOPs are compared by the Pareto domination [11], which is originally defined by Vilfredo Pareto. If a given solution dominates other solutions, it is better than the rest. Thus, for a given solution set, the nondominated solutions are the best solutions of the set. A Pareto-based MOGA embeds the Pareto domination concept into a genetic algorithm (GA). In a single-objective GA, an objective of a solution i is directly used to evaluate the fitness of the solution. On the other hand, the Pareto-based MOGA employs Pareto domination concept to assign fitness or rank of a solution from objectives of the solution. Many Pareto-based MOGAs had been developed, for instance, Fonseca and Fleming's genetic algorithm (FFGA) [12], nondominated sorting genetic algorithm (NSGA) [13], strength Pareto evolutionary algorithm (SPEA) [14], fast elitist nondominated sorting genetic algorithm (NSGA-II) [15], improved strength Pareto evolutionary algorithm (SPEA-II) [16], compressed-objective genetic algorithm (COGA) [17], multiobjective uniform-diversity genetic algorithm (MUGA) [18], and improved compressed-objective genetic algorithm (COGA-II) [19].
In multiobjective optimization, an increase in the number of conflicting objectives significantly raises the difficulty level in multiobjective optimization problems [20]. When two candidate solutions are compared, a solution a does not dominate another solution b unless all objectives from a satisfy the domination condition. With a large number of objectives, the chance that two solutions cannot dominate one another is unsurprisingly high. Since a Pareto-based MOGA is only capable of reporting a finite set of solutions, a large number of possible nondominated solutions have to be screened for a good approximation of Pareto front [21, 22]. The improved compressed-objective genetic algorithm (COGA-II) [19] employs only one criterion, winning score, to assign “preference” levels to nondominated solutions taking the view that the higher the preference level of nondominated solutions, the better the Pareto front approximation. Boonlong et al. [19] proved that COGA-II outperforms the fast elitist nondominated sorting genetic algorithm (NSGA-II) [15] and the improved strength Pareto evolutionary algorithm (SPEA-II) [16] by testing the algorithms with the scalable multiobjective optimization test problems DTLZ1-7 [20] with 3–6 objectives.
Most of the previous works that used MOGAs as an optimizer employ the maximum number of generations as termination condition. However it does not guarantee that obtained solutions are the converged solutions or it probably wastes running time if solutions converge before the termination condition is met. Therefore, convergence detection is quite important because it can provide good solutions and reduce running time. This paper incorporates the convergence detection into the original version of the improved compressed-objective genetic algorithm (COGA-II) [19] for solving the multiobjective optimization of a vibration vehicle model with five degrees of freedom [8].
2. Multiobjective Optimization
A multiobjective optimization problem (MOOP) has a number of objective functions which are to be minimized or maximized. In the following, the multiobjective optimization problem (MOOP) is stated in its general form:

A solution

Procedure of a Pareto-based multiobjective optimizer (obtained from [11]).
Definition 1 (Pareto domination). A solution x dominates the other solution y if the two conditions are satisfied:
for any objective, solution x is not worse than solution y;
for at least one objective, solution x is better than solution y.
3. Improved Compressed-Objective Genetic Algorithm (COGA-II)
Optimization problems usually arise when limited resources are available for existing demands. If multiple conflicting objectives are required in the problem formulation, the problem is multiobjective. Various techniques have been proposed for solving these multiobjective optimization problems. Among these, the genetic algorithm has been established as one of the most widely used method for multiobjective optimization [12, 14–16, 23–25]. Due to the parallel search nature of the algorithm, the approximation of multiple optimal solutions—the Pareto optimal solutions, comprising of nondominated individuals—can be effectively executed. The performance of the algorithm always degrades as the search space or problem size gets bigger. An increase in the number of conflicting objectives has also significantly raised the difficulty level [20]. Thus, the nondominated solutions may deviate from the true Pareto front; the coverage of the Pareto front by the solutions generated may be affected.
A number of strategies have been successfully integrated into genetic algorithms to solve these problems, including a direct modification of selection pressure [12, 13] and elitism [14, 23]. Although they have been proven to significantly improve the search performance of genetic algorithms, virtually all reported results deal with only few objectives. In reality, the possibility that a candidate solution is not dominated always increases with objective numbers, leading to an explosion in the total number of nondominated solutions. In an optimization problem with a large number of objectives, the chance that two solutions cannot dominate one another is inevitably high. A genetic algorithm must be able to pick out a well-chosen solution set from a vast number of nondominated solutions in order to successfully approximate the Pareto front.
In order to properly approximate such Pareto fronts, a number of nondominated solutions must be excluded from the search target. One possible technique is to assign different preference levels to nondominated solutions under consideration. It is hypothesized that a set containing highly preferred solutions would reflect a close approximation of the true Pareto front. The original compressed-objective genetic algorithm (COGA) [17] employed two conflicting criteria in the preference assignment. This can be viewed as a transformation from an M-objective problem to a two-objective problem during the survival competition between two nondominated solutions. The improved compressed-objective genetic algorithm (COGA-II) [19] is a developed algorithm of its previous version, COGA. It is quite different from the original COGA in which optimized objectives are transformed to only one preference objective during the survival competition of two nondominated solutions. The preference objectives of COGA are winning score and vicinity index, which are maximum and minimum criteria, respectively; on the other hand, COGA-II has only one preference objective, winning score, a maximum criterion. Although COGA-II employs winning score as COGA, its winning score assignment is not the same as that of the original algorithm. The winning score assignment, rank assignment, main procedure, and truncation of COGA-II will be described in the following sub-sections.
3.1. Winning Score Assignment
The inspiration of winning score assignment can be described by an example of multiobjective optimization to make decision to buy a product from two products A and B by consideration of 5 objectives, if product A is better than product B for the first 4 objectives; however only the last objective, product A, is worse than product B. By Pareto domination in Definition 1, product A does not dominate or is not better than product B; however, actually most people decide to buy product A. The winning score is heuristically calculated from the numbers of superior and inferior objectives between a pair of two nondominated individuals.
3.1.1. Winning Score Assignment of COGA
In the original algorithm, COGA [17], the winning score is directly calculated from the numbers of superior and inferior objectives between a pair of two nondominated solutions. Let sup ij be the number of objectives in the solution i that is superior to the corresponding objectives in the solution j while inf ij is the number of objectives in i that is inferior to j; for a population containing N nondominated individuals, the winning score for the solution i or WS i is given by

where w ij = sup ij – inf ij .
Obviously, w ji = – w ij and w ii = 0. With this assignment, nondominated solutions with high winning scores should be close to the true Pareto front but they tend to cluster around the best values of individual objectives instead of spreading throughout the Pareto front. Therefore, the other preference objective, vicinity index, which is evaluated from the density of values in each objective, is introduced to prevent this problem. The nondominated solutions are then assigned different ranks form their two preference objectives. However there may be strong conflict between these preference objectives for some nondominated solutions; then the ranks of the solutions may be inappropriately assigned [17]. The improve compressed-objective genetic algorithm (COGA-II) eliminates this problem by using only winning score. The winning score assignment of COGA-II, which is different from that of COGA, will be discussed in the following topic.
3.1.2. Winning Score Assignment of COGA-II
The winning score assignment of the original algorithm, COGA, described by (2), employs the equal weight winning score, which is equal to 1, for any objective k. However, due to the relation between objectives of nondominated solutions, such as conflict, harmony, and independence [26], the weight winning scores of all objectives are not necessary equal to each other. For instance, the benchmark problems DTLZ5 and DTLZ6 [20] which have the same true Pareto front, for a set of true Pareto optimal solutions of the problems, the relation of first M – 1 objectives are harmony and the relation of these M – 1 objectives and the last objective M, is conflict. Therefore, by the winning score assignment of COGA, the true Pareto optimal solution with the best value Mth objective, which also has the worst first M – 1 objectives, has the worst winning score which is much less than the winning score of the other true Pareto optimal solution with the worst Mth objective, which also has the best first M – 1 objectives. Since these solutions are the true Pareto optimal solutions, in a correct way they should have the same winning scores, the winning scores of any nondominated solutions in COGA may not be suitable to assign levels to the nondominated solutions.
To avoid this imperfection, the winning score assignment of COGA-II will employ the different weight winning score for any objective k which is evaluated from a set of nondominated solutions. The winning score of a nondominated solution is then calculated from the obtained weight winning scores. For N nondominated solutions of an M-objective optimization problem, let sup ij , inf ij , and eq ij be the number of objectives in the individual i which are superior to the corresponding objectives in the individual j, the number of objectives in i which are inferior to those in j, and the number of objectives in i which are equal to those in j, respectively. For an objective k in an M-objective problem, ρ ijk is defined as
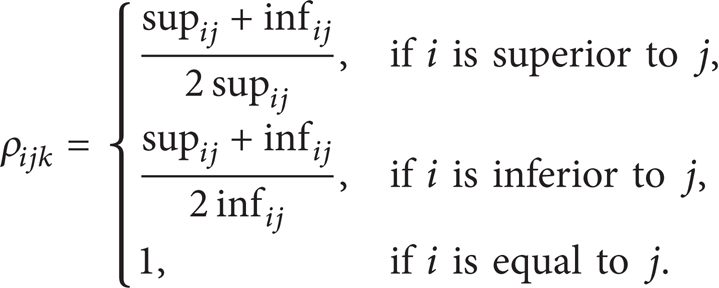
The equation for any individual pairs i and j yields

The manner at which ρ ijk deviates from one depends on the ratio between the numbers of superior and inferior objectives during each solution comparison. This reflects the dependency and correlation among objectives of interest.
Next, the summation of ρ ijk for the objective k over all possible individual pairs is given by
where N is the total number of nondominated individuals.
The winning score of the individual i in a nondominated individual set or WS i is given by

where
The q ijk is a competitive score. q ijk = 1 if the objective k of the individual i is superior to that of the individual j but q ijk = – 1 if the objective k of i is inferior to that of j. Obviously, q ijk = 0 if the objectives k from both individuals are equal. The w ij is a weighted sum of competitive scores from all objectives. For any individual pair i and j, w ji = – w ij , w ii = 0, and – 1 < w ij < 1. This leads to – N < WS i < N. The winning score assignment is particularly used for only nondominated solutions. By this winning score assignment, for a set of true Pareto optimal solution of the benchmark problems DTLZ5 and DTLZ6 [20], the weight winning score of the Mth objective is M – 1 times that of another objective; then the winning scores of any true Pareto optimal solutions are all equal. These examples show that the winning score assignment of COGA-II is more appropriate than that of the original COGA.
It should be noted that the winning score can be utilized to estimate the quality of a solution in a nondominated solutions set if it can be proved that an individual associate with higher winning score is closer to the true Pareto front than that having lower score. It is required that an individual with a high winning score must be close to the true Pareto front. This requirement is satisfied if the relationship between the winning score and the distance from a nondominated individual to the true Pareto front in the objective space can be described by a decreasing function. Boonlong et al. [19] illustrated this relation by a multiobjective minimization problem in which the ith objective or f i equals to the decision variable x i where x i ∊ [0, 1]; this problem has only one true optimal solution of which all objectives are equal to zero. From this previous work, the relationship between the winning score of a solution from 200 random nondominated solutions and its distance to the true optimal solution for the problem with a different number of objectives is displayed in Figure 2. The relationship can be described by a decreasing function especially when the number of objectives is large.

Relationship between winning score (horizontal axis) and distance from the true optimal solution (vertical axis) [19].
From the previous work, Table 1 shows the average of percent correct from comparison of all pairs of 200 random nondominated solutions, from 30 generations of random solutions. For any solution pair comparison, the comparison by winning score is correct if the solution with a higher winning score is closer to the true Pareto solution than the other. In Table 1, the winning score can accurately identify different levels of the nondominated solution with more than 78% correctness of comparison and its effectiveness is increased when the number of objectives increases. For traditional MOGAs that assign equal level to all nondominated solutions, it could be said that the correctness of this assignment is equivalent to only 50%, for all numbers of objectives. Hence, compared to the correctness of traditional MOGAs, the winning score in COGA-II is relatively reliable to estimate the quality of a solution in a nondominated solution set.
Average of percent correct by winning score comparison of various numbers of objectives [19].

3.2. Rank Assignment
With the use of the winning score, a rank value can be assigned to an individual in COGA-II as follows.
Identify nondominated and dominated solutions from an individual set to be assigned ranks.
Evaluate winning score of each individual in the nondominated individual set.
Find extreme individuals among N nondominated individuals. The number of extreme individuals is equal to E, which does not exceed 2M (two individuals with the minimum and maximum values of each objective).
Sort E extreme nondominated individuals in descending order of the winning score. The firstly sorted individual is assigned rank 1. The secondly sorted individual is assigned rank 2, and so forth. Therefore, the lowest rank of extreme individuals is E. In the same way, N – E nonextreme nondominated individuals are also sorted in descending order of the winning scores. However, the ranks of these nondominated individuals vary from E + 1 to N. This rank assignment guarantees that a rank of an extreme individual is always higher than that of a nonextreme individual.
Assign a rank to each dominated individual. The rank of a dominated individual is given by N plus the number of its dominators. The addend N ensures that rank of a nondominated individual is higher than that of a dominated individual.
Although COGA-II had been developed for three-or-more-objective optimization problems [19], it can also be used in two-objective optimization problems. In two-objective optimization, all nondominated individuals will have equal winning scores, which are actually equal to zero. Consequently, ranks of extreme nondominated individuals are all equal to 1, and ranks of nonextreme nondominated individuals are all equal to E + 1.
3.3. Main Procedure
The COGA-II main procedure (Figure 3) is as follows.
Read randomly generated individuals of an initial archive
Assign ranks to individuals in
Perform binary tournament selection with replacement on archival individuals in order to fill the mating pool with special attention to both the rank and the summation of distances between an individual i or SDT i in the archive and all individuals in the current mating pool. At the beginning, SDT i is set to zero. In the first selection iteration, two individuals from the archive are randomly picked; the individual with higher rank will be selected. Otherwise, if their ranks are equal, one individual is selected at random. After the first selection, SDT i of any remaining individual i in the archive is updated by adding its current value with the distance between the individual i and the selected individual. In the next selection iteration, the winning individual is also determined from the rank. However, if the ranks of two competing individuals are equal, the individual with more SDT is selected. Subsequently, SDT i of an individual i in the archive is again updated. The binary tournament selection is then repeated until the mating pool is fulfilled.
Apply crossover and mutation operations within the mating pool. Then place the offspring into the population
Merge the population
Put all N nondominated individuals from
Check termination condition. If the condition is satisfied, report the final archival individuals as the output solution set. If the condition is not satisfied, the solution search will go back to (2). Mostly, the maximum number of generations is used for termination. In order to achieve converged solutions and reduce unnecessary running time, convergence detection will be proposed in this paper.

COGA-II main procedure.
3.4. Truncation
Only the winning score assignment may not guarantee diversity of solutions. The truncation is therefore used to maintain the diversity of an archive of any generation. With the use of the truncation operator, Q individuals are extracted from N available nondominated individuals in set
Find extreme individuals among N nondominated individuals. The number of extreme individuals is equal to E, which does not exceed 2M. If there is only one individual with the minimum/maximum value of objective k, this is the extreme individual. In contrast, if there are multiple individuals with the minimum/maximum value of objective k, an individual is chosen at random to be the extreme individual.
Place all E extreme individuals in the archive. Set the number of archival individuals L = E and the number of remaining individuals in set

where f im and f jm are objectives m of individuals i and j, respectively, while fm, min and fm, max are minimum and maximum values of an objective m for all N nondominated individuals to be truncated, respectively.
However, if there is at least one individual in

where c
i
is the number of individuals in
Select Q – L individuals with the highest values of d
i
RL
from
Increase the counter for the number of archival individuals (L → L + 1) in
4. Convergence Detection for Multiobjective Optimization
The solution convergence is used for the termination condition in Figure 3; it can be described as follows. For MOGAs having archive such as SPEA-II [16], MUGA [18], and COGA-II [19], given that

where C(

where x′ < x″ mean x′ covers (dominates or equals) x″ and C(
5. Vehicle Vibration Model
A five-degree-of-freedom system of vehicle model with passive suspension [8] in Figure 4 is used for performance investigations. The independent coordinates of the system are vertical displacement of seat mass (z c ), vertical displacement of sprung mass (z s ), rotation angle of sprung mass (θ), vertical displacement of front tire (z tf ), and vertical displacement of rear tire (z tr ). There are nine fixed parameters—seat mass (m c ), sprung mass (m s ), moment of inertia of sprung mass (I s ), forward tire mass (m tf ), rear tire mass (m tr ), equivalent spring constant of forward tire (k tf ), equivalent spring constant of rear tire (k tr ), relative position of front tire to the center of sprung mass (l f ), and relative position of rear tire to the center of sprung mass (l r ).
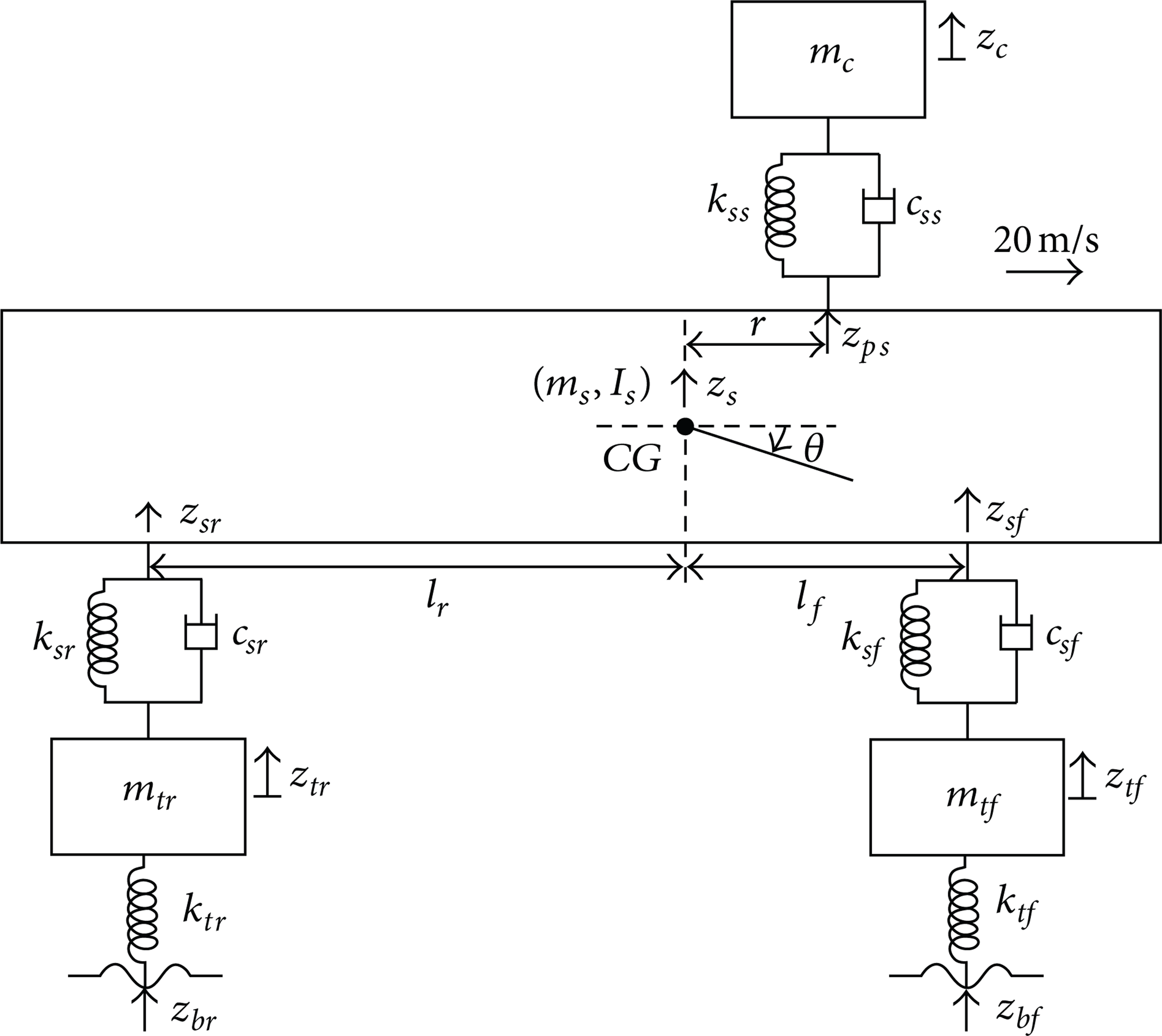
Vehicle vibration model (adopted from [8]).
The values for these fixed parameters are shown in Table 2. On the other hand, there are seven design variables which are equivalent spring constant of seat (k ss ), equivalent damping constant of seat (c ss ), equivalent spring constant of suspension at forward tire (k sf ), equivalent spring constant of suspension at rear tire (k sr ), equivalent damping constants of suspension at forward tire (c sf ), equivalent damping constants of suspension at rear tire (c sr ), and relative position of seat to the center of sprung mass (r). Table 3 shows the ranges of values for the decision variables.
Values for fixed parameters.

Ranges of values for decision variables.

The vehicle is moved directly with constant velocity (v) of 20 m/s and excited by a double road bump. It is assumed that the rear tire follows the same route of the front view with a delay time Δt = (l f + l r )/v = 0.1407 seconds. Due to the excitation of double road bump, the vertical displacements of a point at bottom of forward tire (z bf ) and the vertical displacements of a point at bottom of rear tire (z br ) are given by (11) and (12), respectively, and graphically shown in Figure 5.
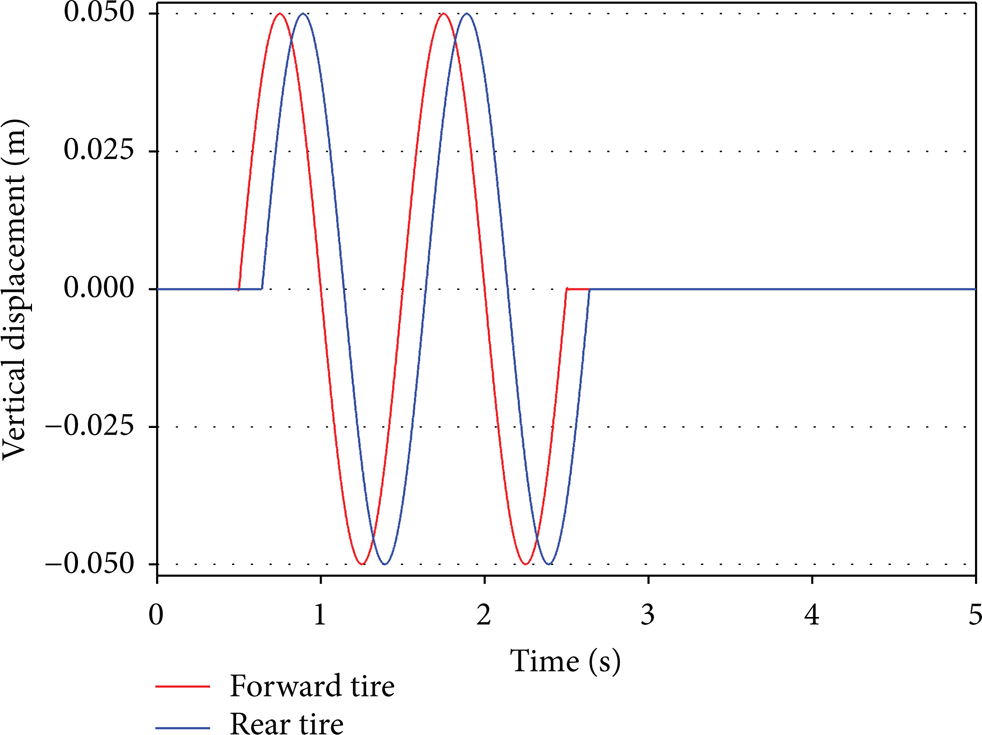
Vertical displacements of points at bottom of forward tire and rear tire.
One has

The equations of motion of the vehicle for the independent coordinates (z c , z s , θ, z tf , z tr ) can be obtained by Newton's second law as





where

There are five objective functions—seat acceleration (x1), forward tire velocity (x2), rear tire velocity (x3), relative displacement between sprung mass and forward tire (x4), and relative displacement between sprung mass and rear tire (x5)—to be minimized. Like the previous work [8], there are five sets of problem—four pairs of design objectives (x1, x2), (x1, x3), (x1, x4), and (x1, x5) are matched for two-objective optimization, and five design objectives (x1–x5) are formulated for the five-objective optimization problem.
In this paper, the numerical indicators, f1 to f5, of these objective functions, x1–x5, are given by the following equation.

where
6. Simulation Results and Discussions
The parameter settings for COGA-II with the convergence detection are illustrated in Table 4. The population size, crossover probability, and mutation probability are quoted from the previous work [8] in order for the performance comparison. After simulation runs, the stop generations, in which solutions are converged, are shown in Table 5. Solutions G1, G2, G3, G4, and H by COGA-II with the convergence detection are selected to be representative solutions of all five sets of design objectives. The first four solutions, G1 to G4, represent the two-objective optimization solution, while solution H is the chosen solution of the five-objective optimization problem. The representative solutions are directly compared to the selected solutions by MUGA from the previous work—C1 to C4 and F. Similarly, the first four solutions C1 to C4 and F represent the optimization solution with two and five objectives, respectively. Conclusively, solution C i is compared to its counterpart G i where i is ith pair of objectives, while solutions F and H are directly compared in the case of optimization with five design objectives.
Parameter settings.

Stop generations.

Table 5 shows the stop generations for COGA-II with the convergence detection; the results show that the average stop generations of COGA-II are mostly less than the fixed number of generations, 240, used in the previous work such as the sets of design objectives (f1, f2), (f1, f5), and (f1–f5). Only in the case that optimizes f1 and f4, the stop generations are significantly more than those of the other sets of design objectives. This shows that stop generations are depended on characteristics of design objectives and problems. If the termination condition is defined by only one maximum number of generations for all sets of design objectives, the obtained solutions are probably not converged or there is some unnecessary time after solutions are converged. Therefore, the convergence detection is important for the test problem in the sense that it ensures the convergence of solutions and prevents excessive running time.
Table 6 shows values of the decision variables and the numerical indicators of design objectives of the selected solutions C1–C4, F by MUGA proposed in the previous work and the selected solutions G1–G4, and H by COGA-II with the convergence detection. For all sets of design objectives, the value of all objective indicators of a selected solution from COGA-II with the convergence detection is better than a selected solution from MUGA. Table 7 shows the values of the decision variables and the numerical indicators of design objectives of solutions with the best values of each design objective, B1–B5. The Pareto fronts with the selected solutions by COGA-II with the convergence detection and the compared solutions from the previous work including solutions B1–B5 of four pairs of design objectives for two-objective optimization are shown in Figures 6, 7, 8, and 9. The Pareto front of a set of design objectives is represented by the nondominated solutions of merged solutions from all repeated runs. Figures 6, 7, 8, and 9 show that a selected solution by COGA-II with the convergence detection dominates that by MUGA from the previous work for any pair of design objectives.
Selected solutions.

Solutions with the best values of each design objective.


Pareto front of f1 and f2 optimization.

Pareto front of f1 and f3 optimization.

Pareto front of f1 and f4 optimization.

Pareto front of f1 and f5 optimization.
Figures 10, 11, 12, 13, and 14 show the comparisons of the time response of the seat acceleration between five selected solutions from the Pareto fronts obtained by COGA-II with the convergence detection and five selected solutions by MUGA from the previous work for all sets of design objectives. By mathematical analysis of differential equations, time response of a coordinate is equal to the sum of homogenous and particular responses. For damped force vibration systems as the vehicle vibration model used in this paper, due to damping effects, the impact of homogenous response is exponentially reduced by the increase of time. The time response of the variable then eventually reduces to the particular time response which is directly related to forcing functions and represents the steady-state vibration. The steady-state motion exists as long as the forcing functions are continuously unchanged. If the forcing functions are changed or no longer exist, the homogenous response significantly influences the time response again.

Time response of seat acceleration of solutions C1 and G1.

Time response of seat acceleration of solutions C2 and G2.
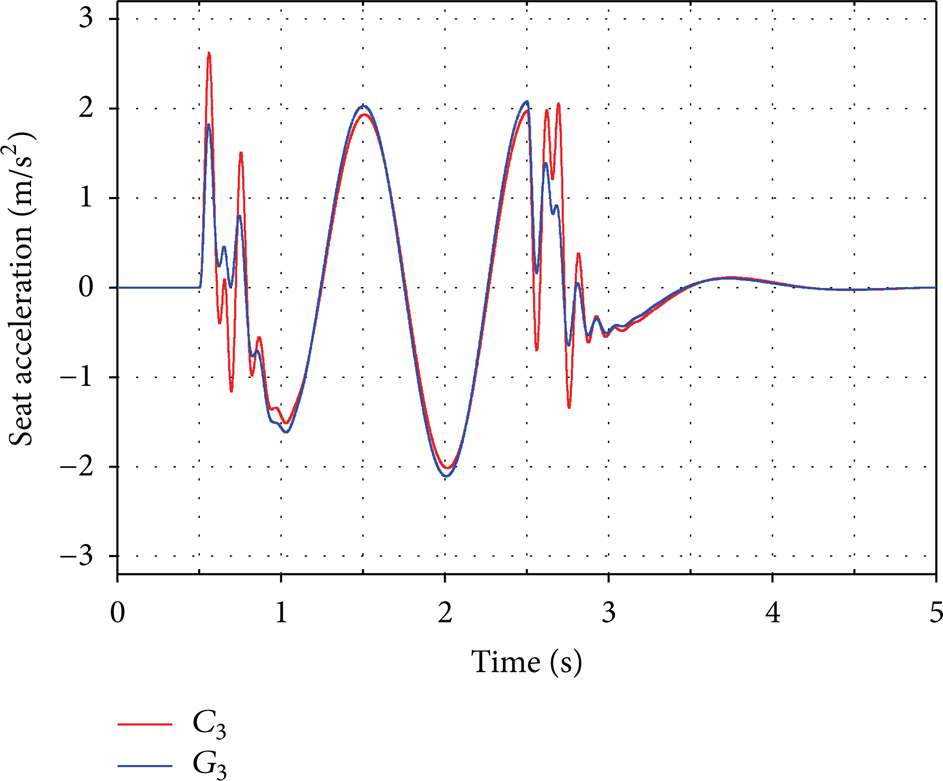
Time response of seat acceleration of solutions C3 and G3.

Time response of seat acceleration of solutions C4 and G4.

Time response of seat acceleration of solutions F and H.
The frequencies of vibration are presented in both homogenous and particular responses. There is only one frequency due to the particular response which is equal to the frequency of the bump excitation, 1.0 Hz, as shown in Figure 5 for any solution. The other frequencies are from the homogeneous response. The values of these frequencies are depended upon the decision variables. For instance, the frequencies due to the homogeneous response of solution C1 are 10.32, 9.00, 4.23, and 0.71 Hz, and those of solution G1 are 10.76, 9.95, 3.68, 1.44, and 0.71 Hz. Hence, including the exciting bump frequency, there are 5 and 6 frequencies in the vibration motion of solutions C1 and G1, respectively.
Vibration motion of the vehicle model from Figures 10, 11, 12, 13, and 14 can be explained as follows. The motion is started when the forward tire is initially excited by the road bump at time = 0.5 seconds. There is a high impact of homogeneous response in earliest stage of the motion. The impact of homogeneous response is exponentially reduced until time is about 1.0 seconds. Thereafter the motion is mostly presented by particular response so that the motion is mainly in only one frequency, 1.0 Hz, the frequency of the bump excitation. However, at time = 2.5 seconds, the forcing functions are changed as the representative function of z bf in (11), and after that with a short period of time, at time = 2.6407 seconds, no exciting forces, which are described by z bf and z br in (11), apply to the model so that from time = 2.5 seconds onwards, the motion is mostly influenced by the homogeneous response.
From Figures 10, 11, 12, 13, and 14, the common difference between the vibration motion of the seat acceleration of the solutions by COGA-II with the convergence detection and those by MUGA from the previous work is presented in 2 periods of time which are 0.5–1.0 seconds and 2.5 seconds onwards. As previously described, the vibration motion is mostly contributed by the homogeneous response in these periods of time. Figures 10, 11, 12, 13, and 14 show that the values of the seat acceleration of homogeneous response from the solutions by COGA-II with the convergence detection are better than those by MUGA from the previous work for all sets of design objectives.
In the period of 1.0–2.5 seconds, the total response is mostly represented by particular response. There is marginal difference between the time response of the solutions by COGA-II with the convergence detection and MUGA from the previous work for the test cases with two design objectives. However, in the case of all five design objectives presented in Figure 14, the values of seat acceleration of solution H by COGA-II with the convergence detection are obviously better than those of solution F by MUGA from the previous work.
The equivalent spring constant of seat (k ss ) and equivalent damping constant of seat (c ss ) behave like a vibration isolator between the sprung mass and the seat. Theoretically, the vibration isolator with small spring constant can reduce more transmitted vibration displacement in the particular response than that with large spring constant [28]. The equivalent spring constant of seat (k ss ) should be as small as possible in order to reduce the transmitted displacement in the particular response from the sprung mass to the seat. Therefore, solution B1 with the best value of the seat acceleration has the smallest value of k ss , 50,000 N/m. To minimize the effect of homogeneous response in the seat acceleration, equivalent damping constant of seat (c ss ) should be as much as possible; hence solution B1 has the largest value of c ss which is 4,000 Ns/m as shown in Table 7.
For the forward suspension, the equivalent spring constant of suspension at forward tire (k sf ) and the equivalent damping constants of suspension at forward tire (c sf ) represent the vibration isolator between the forward tire and the sprung mass. Similar to k ss , small value of k sf can reduce more transmitted vibration displacement in particular response from the forward tire to the sprung mass than the large value of k sf . Since the seat is located at the front portion of the sprung mass, it is possible that vibration displacement is transmitted from the forward tire to the sprung mass and continuously to the seat. The value of k sf should be as small as possible in order to minimize the seat acceleration. Hence, solution B1 has the smallest value of k sf which is equal to 10,000 N/m. Similar to c ss , the large c sf is required for reducing vibration displacement in homogeneous response transmitted to the seat; the value of c sf of the solution B1 is quite high; it is 1,943.0 N/m.
From Table 7, solution B2 with the best value of f2 has small values of the equivalent damping constants c ss , c sf , and c sr . Comparing solutions B2 and B3 with solution B1, it was found that the value of k ss of solution B2 is close to that of solution B1 while the value of c ss of solution B2 is much different from that of solution B1. In the contrast, for solution B3, the value of k ss of solution B3 is much different from that of solution B1, but the value of c ss of solution B3 is very close to that of solution B1. Table 7 shows that value of f1 of solution B3 is much better than that of solution B2; as a result, it can be said that the value of c ss is highly contributed to the first objective.
For solution B4 with the best value of f4, since f4 is the numerical indicator of the relative displacement between sprung mass and forward tire which is actually deformation of the suspension at the forward tire, in order to minimize the deformation, the equivalent spring constant of suspension at forward tire (k sf ) and the equivalent damping constants of suspension at forward tire (c sf ) should be as much as possible. The values of k sf and c sf of solution B4 are equal to their maximum values, 20,000 N/m and 2,000 Nm/s, respectively. In addition, since f4 is the numerical indicator of the deformation of the suspension at the forward tire, the location of the seat should be far away from the forward tire as much as possible in order to reduce transmitted vibration displacement from the seat to the suspension; the relative position of seat to the center of sprung mass (r) is therefore equal to its lowest value, 0.0 m.
Similarly, for the solution B5 having the best value of f5, since f5 is the numerical indicator of deformation of the suspension at the rear tire, the values of the equivalent spring constant of suspension at rear tire (k sr ) and equivalent damping constants of suspension at rear tire (c sr ) are equal to their upper limit values—20,000 N/m and 2,000 Ns/m, respectively. In addition, in order to reduce vibration displacement transmitted from the seat to the rear tire, the location of the seat should be far away from the rear tire as much as possible; the relative position of seat to the center of sprung mass (r) is then equal to its highest value, 0.5 m.
Since all sets of design objectives contain the first design objective, f1, f1 is always taken in account for optimization. As previously described, the highest value of c ss , which is equal to 4,000 Ns/m, and the lowest value of k sf , which is equal to 10,000 N/m, contribute good value of the first design objective (f1) as shown for solution B1 in Table 7. For the other solutions B2–B5 with the best values of design objectives f2–f5, from Table 7, the values of c ss are mostly close to its maximum value, 4,000 N/m, except solution B2, while the value of k sf is mostly close to the minimum value, 10,000 N/m, except solution B4. Since the first design objective f1 must be optimized simultaneously with each of the other design objectives f2–f5 for 4 pairs of design objectives in two-objective optimization and the first design objective f1 and the other four design objectives are all optimized simultaneously for the five-objective optimization problem, unsurprisingly all selected solutions G1–G4 and H by COGA-II with the convergence detection have the highest value of c ss , 4,000 Ns/m, and the lowest value of k sf , 10,000 N/m, as shown in Table 6.
For the values of r, Table 7 shows that solutions B1, B2, and B5 with the best values of the design objectives have the highest value of r, 0.5 m, while the other solutions with the best values of f3 and f4 have the low value of r. As illustrated in Table 6, the values of r of selected solutions G1–G4 for two-objective optimization are close to the average of the value of r from the solution B1 with the best value of f1 and that from the solution with the best value of each of other objectives. Since most solutions with the best values of the design objectives have the highest value of r, it is possible that the value of r of selected solution H, as shown in Table 6, for five-objective optimization is very close to its upper limit value.
7. Conclusions
The improved compressed-objective genetic algorithm (COGA-II) with the convergence detection is used as the optimizer for multiobjective optimization of a vehicle vibration model. There are five minimized objective functions under consideration—seat acceleration, forward tire velocity, rear tire velocity, relative displacement between sprung mass and forward tire, and relative displacement between sprung mass and rear tire. Based on five-objective functions, five sets of optimization—four pairs of design objectives and five design objectives—are optimized separately.
After the simulation runs, to achieve good value of the first objective, the solutions should have low values of k ss and k sf in order to reduce the transmitted vibration displacement in particular response to the seat, and high values of c ss and c sf are required for minimizing the transmitted vibration displacement in homogeneous response to the seat. Low values of k ss and c ss and high value of r are required for the good value of the second objective. In contrast to the second objective, high values of k ss , c ss and low value of r are required for the good value of the third objective. Since the fourth objective is the deformation of the suspension at the forward tire, to achieve the small deformation, high stiffness and damping constants of the forward suspension are required. In addition, the value of r should be small to avoid transmitted vibration displacement from the seat to the forward suspension. Similar to the fourth objective, for good value of the fifth objective, the deformation of the rear suspension, high stiffness and damping constants of the rear suspension, and high value of r are required.
The selected solutions G1–G4 and H obtained from COGA-II utilizing the convergence detection for searching termination condition are compromised solutions among design objectives optimized simultaneously. These selected solutions are superior to the solutions obtained from MUGA utilizing the constant maximum number of generations for the searching termination in the previous work regardless of sets of design objectives. In fact, COGA-II even uses less numbers of generations than MUGA to obtain sets of optimal solutions for most sets of design objectives. These results show that COGA-II with the convergence detection has good performance for multiobjective optimization of the vehicle vibration model. Furthermore, the convergence detection can ensure convergence of solutions and reduce excessive running time.
In this paper, a periodic road condition was used as the testing cases; however the real road condition is actually random. Since it is impossible that there is only one set of true Pareto optimal solutions to an optimization problem of the vehicle vibration under various randomly generated road conditions, the robust optimal solutions to the problem are required. Therefore, the robustness of solutions to the optimization problem of the vehicle vibration under random road conditions should be considered in a future work that employs COGA-II with the convergence detection as an optimizer.
Footnotes
Acknowledgment
This work was supported by the research and development supporting fund Contact no. R&D 11/2556, from the Faculty of Engineering, Burapha University, Thailand.