
Abstract
Localization is the key supporting technology for wireless sensor networks (WSNs). Security and accuracy are the premise of the localization application. Real-world applications of wireless sensor networks are often subject to a variety of adverse circumstances interference, and the localization performance is seriously affected. In this paper, we propose a BRS-based robust secure localization (BRSL) algorithm in order to reduce the impact of the malicious attackers in WSNs. The BRSL method includes two phases. In the first stage, the trust evaluation framework is established on the basis of beta reputation system. In the second phase, we employ the weighted Taylor-series least squares method to estimate the coordinates of sensor nodes. Simulation results demonstrate that the proposed algorithm is robust and effective.
1. Introduction
Wireless sensor networks (WSNs) are based on the technology of sensor, wireless communication, tiny embedded devices, and distributed computing. They exchange information with the environment through sensors and implement the function of collecting and dealing with data. Wireless sensor networks have been widely used in the fields of environmental monitoring, target tracking, military applications, disaster management, and so forth [1–3].
Self-localization technology of nodes is the prerequisite and basis for the application of wireless sensor networks, especially the position information that is needed for the perceived data. Node localization of WSNs is to determine the positions of normal nodes based on the positions of beacon nodes and the constraint relations between normal and beacon nodes. Positions or coordinates of normal nodes are unknown. Beacon nodes usually get their positions or coordinates through global positioning system (GPS) modules or by manual deployments. Being an essential support technology of wireless sensor networks, node localization has got more and more attention in the recent years [4–10].
Most localization methods depend on measuring the distances or hops between normal and beacon nodes to obtain the coordinates of normal nodes. In many typical localization algorithms [11–13], the coordinates of beacon nodes are generally assumed to be completely correct without any disturbs of adverse factors, and the normal nodes can use beacon information in security. However, in the actual hostile situations, some malicious nodes may intrude into sensor networks. They pretend to be true beacon nodes or attack other anchor nodes and make them declare false coordinates [14, 15]. The false coordinates or distance estimation will cause a major localization error for normal sensor nodes [16]. In this case, some methods should be explored to eliminate or reduce the adverse influence caused by malicious beacon nodes and ensure safe localization in wireless sensor networks.
In this paper, we develop a BRS-based robust secure localization (BRSL) algorithm for solving the node self-localization problem in the case of malicious nodes existence. In BRSL, normal sensor node first observes the anchor nodes in its communication range and evaluates the trust values of these anchor nodes. Specially, the concepts of the beta reputation system are employed to deal with the uncertain factors in trust evaluation. Then, each anchor node obtains a final trust value, and sensor nodes compare the final trust values of anchor nodes in their multihop communication range with the stored threshold. Finally, the normal sensor nodes utilize the trustful anchor nodes to estimate their coordinates. All the above operations can be carried out by each node. The method is a completely distributed localization approach. Through simulations, we demonstrate that the BRSL method can efficiently reduce the influence of malicious attackers in WSNs.
The remainder of the paper is organized as follows: Section 2 introduces related works on secure localization algorithms. Section 3 presents the network model, attack model, and related definitions. Section 4 provides the details of the BRS-based robust secure localization (BRSL) algorithm. Section 5 presents the simulation results. Section 6 concludes the paper.
2. Related Works
Alfaro et al. [17] consider the localization security of sensor nodes under limited trust anchor nodes. It introduces three algorithms to enable the sensor nodes to determine their positions, but it would fail when the malicious anchor nodes are in colluding conditions.
Liu et al. [18] propose two secure localization algorithms. One is attack-resistant minimum mean square estimation, which excludes malicious anchor nodes by the consistency check. The other is voting-based location estimation. The algorithms are difficult to work for the malicious anchor nodes in colluding conditions.
Zhu et al. [19] propose an attack detection module which can detect compromised beacons and provide a localization service in terms of bounded estimation error by secure localization module, but it mainly concentrates on the one-hop localization.
Liu et al. [20] present a secure localization mechanism that detects malicious anchor nodes claiming fake positions. It uses redundant anchor nodes instead of normal nodes in the sensing field to verify malicious anchors. The method relies on a centralized base station for the detection.
Li et al. [21] introduce a secure scheme “Bilateration” which is derived from multilateration. It calculates the weight of anchor nodes and decides which anchor nodes are malicious. After ignoring the coordinates caused by compromised nodes, it uses the average value of the left candidate positions as the estimated location of the sensor node, but it mainly focuses on the one-hop localization.
3. Preliminaries
3.1. Network Model
We consider a network consisting of two types of nodes, namely, anchor nodes and sensor nodes. The anchor nodes are specially equipped and aware of their coordinates after deployment. The sensor nodes, whose positions are yet to be discovered, estimate their locations by measuring distances to neighboring anchor nodes. All nodes are randomly distributed in a 2D spatial region. Every node has a unique identity (ID). The transmission range or ranging radius of each node is R. Every node is capable of measuring the distance to any of its immediate neighbors. The ranging error e follows a Gaussian distribution
3.2. Attack Model
We assume that the WSN is in a hostile environment, that is, there are malicious attackers in the network. The attackers attack the anchor nodes in order to make them declare dishonest coordinates. When an anchor node is attacked and broadcasts erroneous locations, we call it malicious anchor node. The nodes claiming actual coordinates are called benign anchor nodes. We consider an adversarial environment where the malicious anchor nodes are in noncolluding scenario or colluding scenario. If the malicious anchor nodes are noncolluding, they cannot know whether other anchor nodes are malicious or not. They can only fake their own declared locations to affect the localization process. While the malicious anchor nodes are colluding, they can detect whether other anchor nodes are the same type, and each pair of colluding malicious anchor nodes can revise the measure distance between them by changing their declared locations.
As shown in Figure 1, when a sensor node M gets enough measurement distances


Node localization with malicious anchor node.
If the anchor node
3.3. Related Definitions
To be convenient, some necessary definitions are given in the following.
Measurement distance: node i is in the communication radius of node j. The physical measurement distance from i to j (through RSSI, TDOA, etc.) is called measurement distance.
The Euclidean distance: the distance between the declared coordinates of two anchor nodes i and j, that is,

Multihop communication range: the range that a node's propagation packet can reach through multihop forwarding.
Multihop count: the hops count of the shortest path between a pair of nodes. For example, if the shortest path between nodes i and j passes T nodes (including i and j), the multihop count of nodes i and j is
4. BRS-Based Robust Secure Localization (BRSL) Algorithm
In BRSL method, every sensor node has the detecting function. The sensor node examines each of the anchor nodes that are available to it and evaluates the reliability of each anchor node according to the geometric relationship among anchor nodes. After the sensor node obtains the final trust values of each anchor node, a weighted Taylor-series least squares method is utilized to compute the sensor nodes' coordinates. In general, the BRSL method includes two main phases: trust evaluation of anchor nodes and the localization of sensor nodes.
4.1. Trust Evaluation of Anchor Nodes
In this subsection, we employ the concepts of the beta reputation system [22] to construct the trust evaluation framework of anchor nodes. In contrast to most other intuitive reputation systems, the beta reputation system has a firm basis on the theory of statistics, that is, the beta probability density function. The beta distribution B

The gamma function [23] (represented by the capital Greek letter
The beta reputation system consists of two elements


In the network, every anchor node has a unique ID, and the sensor node is assumed to have the detecting function. We utilize the beta reputation system to detect the malicious anchor nodes. The detecting process is considered with two possible outcomes (benign anchor node and malicious anchor node). Let
Let Compute If inequality If inequality
For example, Figure 2 shows the geometric relationship among anchor nodes, in which Compute the trust value of anchor node Assume that m (m≤ The Compute the trust value of anchor node Judge whether anchor node After the anchor node The sensor nodes compare the





Geometric relationship among anchor nodes.
The determination of threshold ∇ depends on the final trust value of each anchor node. The threshold ∇ is defined as follows

From the above steps, we will get the trust evaluation of anchor nodes. The situation we investigated in this paper is that the percentage of malicious anchor nodes is less than half of the number of anchor nodes. When the malicious anchor nodes are noncolluding, they will not cooperate with each other. Therefore, it is hard for these malicious anchor nodes to obtain high value of
Formula (8) shows that the bigger
4.2. The Localization of Sensor Nodes
When utilizing malicious anchor nodes to localize the sensor nodes, the localization accuracy of sensor nodes is very low. To resolve this problem, we eliminate the malicious anchor nodes before the localization phase. The sensor node M utilizes all its multihop communication anchor nodes to estimate its coordinates. The traditional method like maximum likelihood estimation (MLE) has a high computational complexity and always loses much coordinates information.
We employ the weighted Taylor-series least squares algorithm to estimate the coordinates of sensor nodes and the final trust values
Assume

Firstly, calculate the centroid coordinates
Secondly, expand the function


Thirdly, let
Finally, repeat the second step and the third step until the iteration termination condition is satisfied or the maximum iteration number is reached. The final output
5. Performance Evaluation
In this section, the performance of the BRSL algorithm is tested. All simulations are executed in MATLAB.
The WSN is in a hostile environment, and the malicious anchor nodes are in two conditions: noncolluding or colluding. The default network configuration parameters are shown in Table 1. Unless specified, the default parameters are used in the simulations.
Default network configuration parameters.

Figure 3 shows the random network deployment, and each anchor node has a unique ID in all the simulations, where benign anchor nodes' IDs are from 1 to 20 and malicious anchor nodes' IDs are from 21 to 30.

Network deployment.
5.1. Trust Evaluation of Anchor Nodes
Firstly, we analyze the trust evaluation of anchor nodes. Figures 4 and 5 show that the final variances of benign anchor nodes are bigger than those of the malicious anchor nodes, no matter whether the malicious anchor nodes are noncolluding or colluding. Therefore, the weight

Final variances of anchor nodes when malicious anchors are in noncolluding condition.

Final variances of anchor nodes when malicious anchors are in colluding condition.

Final trust values of anchor nodes when malicious anchor nodes are in noncolluding scenario.

Final trust values of anchor nodes when malicious anchors are in colluding scenario.
5.2. Evaluation of BRSL Algorithm
In this subsection, we compare the average localization error (ALE) of the BRSL algorithm with other localization techniques: RMLA2 [15], RMLA1 [15], Bilateration [21], and the traditional multihop localization method without trust evaluation in which Taylor-series least squares solver is used (t-TLS for short). Based on our simulations, we show that BRSL has superior performance in localization accuracy.
The ALE is normalized by the nodes' communication radius R:

Figures 8 and 9 show the impact of malicious anchor number on the localization accuracy of BRSL, RMLA2, RMLA1, Bilateration, and t-TLS. With the increase of number of malicious anchor nodes, the ALE of RMLA2, RMLA1, Bilateration, and t-TLS rises obviously, while that of BRSL remains stable (no more than 22% in noncolluding scenario and 30% in colluding scenario). Therefore, BRSL is robust for multihop localization and can greatly improve the average localization accuracy no matter the malicious anchor nodes are noncolluding or colluding.

ALE versus malicious anchor number when malicious anchor nodes are noncolluding.

ALE versus malicious anchor number when malicious anchor nodes are colluding.
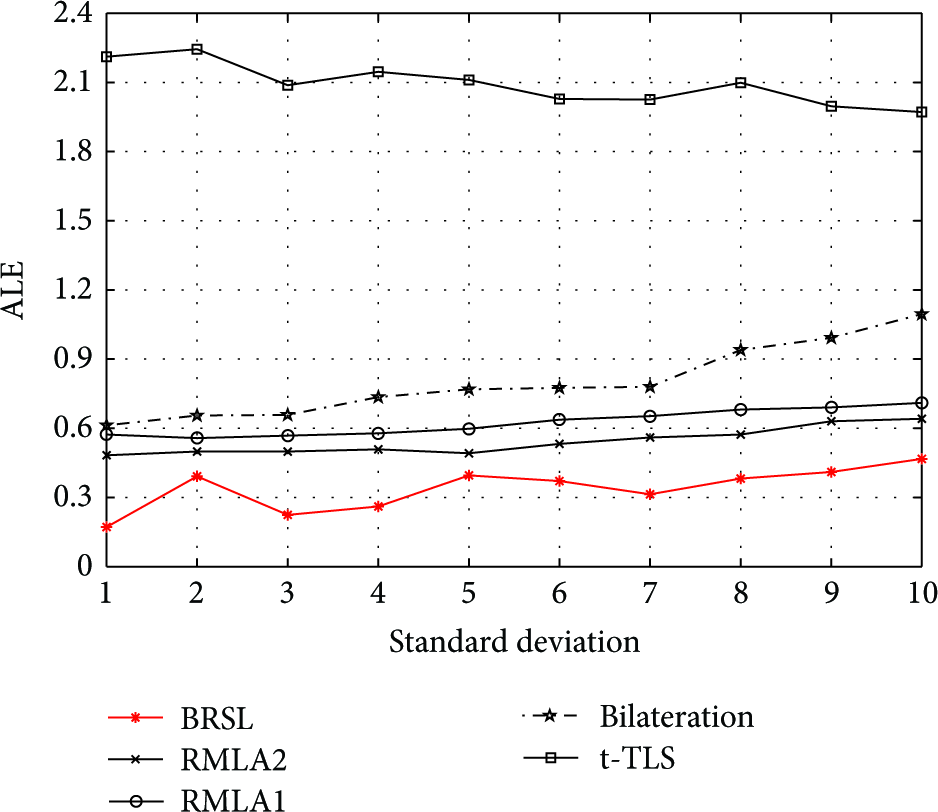
Figures 10 and 11 show the comparison results of ALE under different standard deviation λ of ranging errors in noncolluding and colluding scenario, respectively. The ALE of each algorithm increases with standard deviation λ. Compared with RMLA2, RMLA1, Bilateration, and t-TLS, BRSL may approximately improve the localization accuracy by 10%, 15%, 55%, and 110%, respectively, in noncolluding scenario and 15%, 20%, 65%, and 150% in colluding scenario. The BRSL performs much better than other algorithms.

ALE versus the standard deviation λ when malicious anchor nodes are in noncolluding scenario.
ALE versus the standard deviation λ when malicious anchor nodes are in colluding scenario.
Figures 12 and 13 illustrate the relationship of ALE with the times of network deployment. The number of simulation rounds equals to the times of network deployment. The ALE almost does not change with the number of simulation rounds whether the malicious anchor nodes are in noncolluding or colluding condition. The variety of network topology does not affect the detecting and localization process.

ALE versus rounds number when malicious anchor nodes are noncolluding.

ALE versus rounds number when malicious anchor nodes are colluding.
5.3. Cost Analysis
Finally, we analyze the costs of five algorithms. Assume a sensor node
6. Conclusions
In this paper, we propose a BRS-based robust secure localization algorithm for the case of presence of malicious anchor nodes. Based on the beta reputation system and the trust evaluation, the malicious anchor nodes are detected and excluded. By utilizing the weighted Taylor-series least squares method, the coordinates of sensor nodes are estimated. The simulation results demonstrate that the BRSL algorithm can effectively distinguish malicious anchor nodes and improve localization accuracy, as well as resist topology variety and ranging uncertainties. In the future, our work will focus on the secure localization when there are multiple and different attacks in complex environments.
Footnotes
Acknowledgments
The authors are grateful to the anonymous reviewers for their industrious work and insightful comments. This work is supported by National Natural Science Foundation of China under Grant nos. 61001138 and 61201317.