
Abstract
Multihop localization is a popular approach for determining the positions of normal nodes in large-scale wireless sensor networks. However, most existing multihop localization studies assume that the declared positions of beacon nodes are always reliable or even free of errors, which is not a valid assumption in practice. In this paper, we propose a robust multihop localization algorithm (RMLA) based on trust evaluation for diminishing the effect of unreliable beacons on the accuracy of node localization. Firstly, the trust evaluation framework is established on the basis of evidence theory. According to the multihop geometric relationship among nodes, every beacon evaluates the reliability of other beacons' declared positions. Then, the normal nodes integrate the evaluation results to obtain the total trust degrees of their multihop communication beacons, by use of an average method or an enhanced D-S evidence combination rule. Finally, the normal nodes employ the weighted Taylor-series least squares solver to estimate the optimal values of their coordinates. Extensive simulation results in isotropic and anisotropic networks show the robustness and effectiveness of our algorithm.
1. Introduction
Wireless sensor networks (WSNs) which consist of a large number of low-cost, small-size, and multifunctional sensor nodes spark a revolution in the field of information technology (IT). Due to the advantages of easy deployment, self-management, and no requirement for fixed infrastructure, WSNs can be applied to a wide variety of areas, such as environment monitoring, target tracking, traffic management, battlefield spying, healthcare service, and bush fire surveillance [1–6]. In these applications, the sensor nodes need to collaborate with each other in sensing events of interest by exchanging acquired data. To make the data collected from sensor nodes meaningful, the positions of nodes are often required. Being an essential support technology, WSN localization has got more and more attention in recent years [7–12].
WSN localization is to determine the positions of normal nodes based on the knowledge of beacon nodes (beacons for short) and internode distance or bearing measurements. Since the beacons usually obtain their positions through global positioning system (GPS) or manual configuration in fixed places, raising the density of beacons will significantly increase the cost of network deployment. Therefore, the beacons should make up only a small proportion of sensor nodes in large-scale WSNs. In this case, the normal nodes may fail to estimate their positions by directly measuring the distances to beacons due to their short-range measurement abilities. To solve this problem, multihop localization approach is proposed.
In multihop localization, the normal nodes are not necessarily the one-hop neighbors of beacons, and the distances between any pairs of nonneighboring nodes are inferred by approximating the length of the shortest path to the Euclidean distance. A common assumption in most existing multihop localization studies [13–23] is that the beacons' declared positions are always reliable or even free of errors. However, due to several unavoidable factors (e.g., beacon movement, GPS uncertainties, malicious attacks, etc.) in practice, some beacons (called unreliable beacons (UBs)) may broadcast erroneous or inaccurate position information. A representative application scenario is that sensor nodes are deployed in the wild to monitor the bush fire or wildlife behavior. Some fixed beacons may be moved by animals or strong wind because they are normally quite tiny. But they still send their original coordinates that are far away from their current positions. In a typical underwater sensor network [24], the beacons first localize themselves through communicating with the surface buoys, that are equipped with GPS receivers, and then assist normal nodes in estimating their locations. Affected by GPS error, nonline-of-sight (NLOS) and other factors, the beacon positions are subject to certain uncertainties. What is more, in hostile environments, the WSNs may suffer from various kinds of internal or external attacks [25]. Some malicious or compromised beacon nodes may give fake position information to disturb the localization procedure of normal nodes. In the above circumstances, robustness and resistance against UBs is an important concern of WSN localization.
In this paper, we devise a robust multihop localization algorithm (RMLA) based on trust evaluation for solving the node self-localization problem in the presence of UBs. To the best of our knowledge, this paper is the first one that introduces the idea of trust evaluation into the unreliable beacon-tolerant multihop localization. In RMLA algorithm, the beacons first observe each other to evaluate the credibility of their multihop communication beacons. Specially, the concepts of evidence theory are employed to deal with the uncertainty factors in trust evaluation. Then the normal nodes integrate the evaluation results to obtain a total view about the trust degrees of their multihop communication beacons. Finally, the normal nodes use the total trust degrees of beacons as weights to achieve robust estimation of their positions. As all these above operations are carried out on each sensor node, RMLA is a completely distributed localization approach with less communication and computation cost. Through simulations, we demonstrate that RMLA can efficiently reduce the influence of both UBs and distance estimation errors on node multihop localization. Under various conditions, compared with some existing localization algorithms, RMLA has apparent advantages in accuracy and robustness.
The rest of this paper is organized as follows. In Section 2 we introduce related works on multihop localization and unreliable beacon-tolerant localization. In Section 3 we formulate the multihop localization problem and introduce some necessary definitions. In Section 4 we present the details of our proposed RMLA algorithm. Section 5 evaluates the performance of RMLA algorithm through simulations. Lastly, Section 6 concludes this paper.
2. Related Works
2.1. Multihop Localization Studies
Based on the idea of distance vector (DV) routing and GPS positioning, Niculescu and Nath [13] proposed two low-cost localization solutions, called DV-distance (range-based) and DV-hop (range-free) algorithms. They are the origination of multihop localization schemes for WSNs. In both algorithms, the lengths of shortest paths or minimum hop counts to beacons are estimated through the message flooding that is similar to the distance vector routing. The accuracy of DV-distance and DV-hop is built on the assumption that the shortest path between a pair of nodes is close to a straight line, which may not always be achievable in anisotropic networks. Shang et al. [14] studied the effect of beacon selection on multihop localization of WSNs. The experimental results show that using only the four nearest beacons could get better localization performance in most cases. In this paper, we denote this method as 4-Multihop. Lim and Hou [15] designed a proximity-distance map (PDM) to characterize the anisotropic features of WSNs. Firstly, the beacons derive an optimal linear transformation collaboratively to map the precise Euclidean distances and the proximities between pairwise beacons. Then, the map is sent to normal nodes to assist them in modifying their multihop estimative distances. The intuition of PDM is that the topology character of entire WSN can be well represented by beacons, but it is not the case in beacon-clustered networks. Cheng et al. [16] developed an algorithm called hybrid localization (HyBloc) to provide reliable localization service with a limited number of clustered beacons. It combines two techniques: MDS-MAP and PDM. HyBloc is less susceptible to the adverse effect of beacon placement, but it requires more communication and computation cost than PDM. Wong et al. [17] proposed a density-aware hop-count localization (DHL) algorithm. In DHL, node density is considered, and an empirical range ratio (the ratio of expected hop distance to node's communication range for a given local density) table is constructed to reduce the overestimation of multihop distances. Wang and Xiao [18] presented an improved multihop algorithm called i-Multihop to minimize the effect of erroneous multihop estimative distances on node localization. First, the upper bound constraints are utilized to filter out the incorrect distance estimations, and the estimated positions of nodes are pinpointed to the intersection constrained by the correct distances. Second, the distance fitting is used to fit the correct distance measurements, which makes the final estimated positions less affected by the layout of beacons. But i-Multihop has higher computation complexity. Severi et al. [19] gave a constrained semidefinite programming localization algorithm (CSDPLA) which is highly robust when inaccurate range information is present. CSDPLA can run in both centralized and distributed ways and reduce communication cost compared with the classic message-passing localization solutions. To tolerate network anisotropy, Xiao et al. [20] introduced a distributed pattern-driven scheme to produce accurate multihop distance estimation. The main idea of the pattern-driven scheme is to exploit the observation that in anisotropic networks the hop count field propagated from a beacon exhibits three patterns, namely, concentric ring (CR), centrifugal gradient (CG), and distorted gradient (DG). For each pattern has its dominating error source in multihop distances, different distance estimation schemes are adopted in node localization. Lee and Kim [21] considered the relationship between node's communication range and localization accuracy of range-free schemes and proposed a selection method of communication range for DV-Hop algorithm. By utilizing the selection method, DV-Hop can produce more accurate estimations of average hop distances for normal nodes, and therefore obtain better localization results than the algorithms with fixed communication range. Guo et al. [22] designed a backpropagation (BP) neural network-based localization algorithm (BPL) for three-dimensional (3D) WSNs, in which a BP model is constructed to revise the multihop estimative distances among non-neighboring nodes. Actually BPL is a semidistributed localization solution. Wan et al. [23] gave a light-weight multihop localization algorithm based on grid-scanning (MLGS). By computing the intersection of bounding square rings, the candidates of node coordinates are restricted within a small scope. Then, the close-to-optimal values of node coordinates are searched through a grid-scanning procedure. When all beacons are reliable, MLGS has better adaptability to irregular network topology and lower computation complexity for node localization in large-scale WSNs.
2.2. Unreliable Beacon-Tolerant Localization Studies
In the literature, Kuo et al. [26] defined the beacon movement detection (BMD) problem and proposed four BMD schemes to reduce the effect of beacon movement on node localization. Through mutual observations among beacons, the BMD engine automatically monitors the unnoticed location changes of beacons. After identifying such UBs, the WSNs remove them from the localization engine. Fan et al. [27] presented a two-step localization algorithm to deal with the case, where both inaccurately positioned beacons and ranging error accumulation exist. First, a ranging error-tolerable topology reconstruction method is utilized to estimate the relative positions of sensor nodes. Then, the inaccurately positioned beacons are detected according to the pairs of connected beacons. Both steps need to be performed in a central controller. Based on the fusion of GPS measurements and beacon-to-beacon distance or angle-of-arrival (AOA) estimates, Yu and Guo [28] devised an effective approach to improve the accuracy of beacon positions for both line-of-sight (LOS) and NLOS scenarios. But this method is only suitable to the beacons equipped with GPS receivers. Srirangarajan et al. [29] developed a distributed localization algorithm based on second-order cone programming (SOCP) relaxation. In the presence of beacon position errors, the beacons refine their positions by using the relative distance information communicated with their neighbors. Due to frequent information exchange, this algorithm is energy-inefficient. Vemula et al. [30] formulated node localization from a probabilistic point of view. They proposed four iterative and Monte Carlo sampling-based methods that incorporate beacon position uncertainties to estimate the position distribution (mean and covariance) of normal nodes. These methods have relatively good performance in inhibiting the accumulation of localization errors. Lui et al. [31] brought forward a novel semi-definite programming algorithm for WSN localization with uncertainties in both beacon position and signal propagation speed and presented its simplified form assuming that beacon position errors are independently and identically distributed. Srinivasan et al. [32] introduced the concept of reputation to WSN localization and proposed an approach called distributed reputation-based beacon trust system (DRBTS) for excluding malicious beacons that provide false location information. In DRBTS, each beacon monitors its one-hop neighborhood for misbehaving beacons and updates the reputations of the corresponding beacons. When estimating their coordinates, the normal nodes adopt a simple majority voting scheme to determine whether or not to use a given beacon's location information. Park and Shin [33] gave an attack-tolerant localization protocol, named verification for iterative localization (VeIL). By exploiting the high spatiotemporal correlation existing among neighboring nodes, VeIL can prevent most of the UBs from localization system. Zhu et al. [34] proposed an innovative modular solution featuring two light-weight-modules that are for dedicated functionalities, respectively, but can also be closely integrated. First, some simple geometric triangular rules and an efficient voting technique are harnessed to enable the attack detection module which identifies and filters out unreliable location references. Then, a secure localization module is constructed to compute and cluster certain reference points and estimate the position of normal node with the centroid of the most valuable reference points identified. Jadliwala et al. [35] theoretically analyzed the necessary and sufficient conditions to guarantee a bounded localization error during a two-dimensional (2D) distance-based location estimation in the presence of UBs. On this basis, they outlined three distance-based localization algorithms that can guarantee the localization accuracy, when UB number is below a given threshold. These studies above mainly concentrate on the one-hop or centralized WSN localization. Most of them require densely deployed beacons and higher communication cost, which limit their widespread application in large-scale WSNs.
3. Preliminaries
3.1. Problem Formulation
We consider a network consisting of P beacon nodes and Q normal nodes. All nodes are randomly distributed in a 3D spatial region. The identities (IDs) of beacon nodes are from 1 to P, and those of normal nodes are from
As shown in Figure 1, when the normal node


Node localization with an unreliable beacon.
Generally,
3.2. Related Definitions
Before describing our proposed algorithm, we first introduce some necessary definitions:
multihop communication range: the largest range that a node's propagation packet can reach through multihop forwarding. In dense networks, the radius of a node's multihop communication range is approximately TTL (time to live, i.e., the maximum times that a node's propagation packet can be forwarded) times of its communication radius R; multihop communication beacon: If a node multihop count: the number of line segments in the shortest path between a pair of sensor nodes. If the shortest path calculated distance: the Euclidean distance between the declared positions of pairwise beacons. If the declared coordinates of beacons

4. Robust Multihop Localization Algorithm
In RMLA algorithm, each beacon evaluates the reliability of other beacons according to the multihop geometric relationship among them, which helps the normal nodes obtain the total trust degrees of their multihop communication beacons and further lays a foundation for robust localization of WSNs. In general, the RMLA algorithm includes three main phases: trust evaluation among beacons, calculation of integrated trust values and weighted estimation of node coordinates. The details of RMLA algorithm are given in the following.
4.1. Trust Evaluation Framework
Trust is an evaluation behavior of a subject to an object. It specifies, evaluates, and sets up trust relationship among entities. Due to the subjectivity of trust evaluation, the evaluation results usually suffer from certain uncertainties. In order to bring the uncertainty factor into the trust evaluation among nodes and make it more reasonable, we employ the concepts of evidence theory [36] to construct the trust evaluation framework in RMLA.
Firstly, we define the identification frame

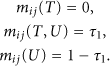
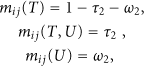
In evidence theory, as the rationality and objectivity of BPA function directly influence the accuracy and effectiveness of the evidence fusion, how to determine the BPA function is a key issue. Overall, the BPA values of trust evaluation among beacons should follow the two basic principles:
the sum of all BPA values is equal to 1, that is, the BPA values are dependent on the multihop geometric relationship among beacons. In general, the smaller the difference between the multihop estimative distance (approximation of the Euclidean distance) and the calculated distance is, the larger
4.2. Trust Evaluation among Beacons
Figure 2 shows the multihop geometric relationship among beacons, in which
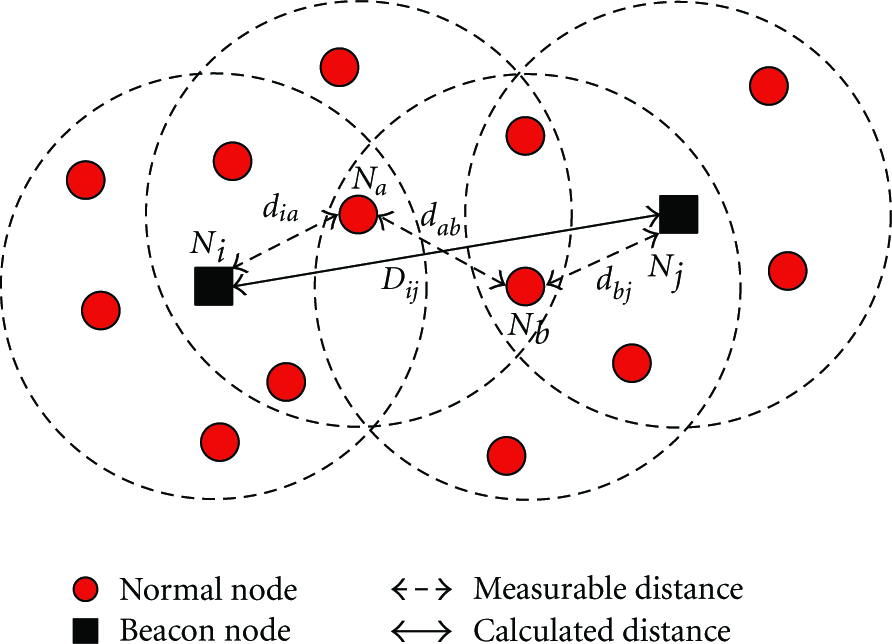
Multihop geometric relationship among beacons.
We then extend our consideration to the general case, where the declared positions of beacons may be unreliable. Taking R and if the calculated distance between In practice, due to the influence of environment noise, the measurable distances among neighboring nodes are not exactly accurate. This may lead to the case that a few measurements among neighboring beacons are a little bigger than R (or a few multihop estimative distances between pairwise nonadjacent beacons slightly exceed If the calculated distance where If In multihop scenario, most of trust evaluations among beacons belong to this case. For large-scale or sparse WSNs, we can set a smaller TTL value to reduce the impact of detoured paths on multihop distance estimation. Then the trust evaluation is only confined to the local range (i.e., node's multihop communication range) of WSNs, which prevents the appearance of bigger

4.3. Calculation of Integrated Trust Values
After the beacon
Figure 3 shows how the normal node average method: assuming the weights of trust evaluation values This average method is simple and requires less computation cost. But it only balances the beacons' viewpoints, while does not make full use of the uncertainty information in trust evaluation values. Its integration performance needs to be further improved. enhanced D-S combination method: in evidence theory, the Dempster-Shafer (abbreviated D-S) combination method [36] is a basic rule to evaluate the joint effect of evidences. It can integrate the fuzzy and uncertain information arising from multiple aspects. If the conflict among evidences is weak, the D-S method has preferable integration performance. However, in the trust evaluation among beacons, some beacons (especially the UBs) may produce evaluation results that are far from most beacons' viewpoints. In this case, there would be strong conflict among evidences, which results in the reduction of combination performance of D-S method. In order to diminish the influence of evidence conflict on trust value integration, we adopt the enhanced D-S combination method in the following.
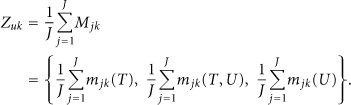

Integration of trust evaluation values.
Firstly, we define the deviation degree of evidence:

When
δ
jk
is large, that is,

Here, we briefly discuss how to set the value of threshold Δ. As
According to (9), the normal node

Finally, the normal node
4.4. Weighted Estimation of Node Coordinates
In Section 3.1, the essence of solving (1) is to find an optimal
After the normal node

By weighting, the beacons with lower trust degrees (or UBs) will have smaller influence on the coordinate estimation of node calculate the centroid coordinates expand the function set
solve (14) by using the least squares method, and we get judge whether the iteration termination condition repeat steps (2) to (5) until the iteration termination condition is satisfied or the maximum iteration number is reached, whichever comes earlier. The final output


4.5. Discussion of RMLA Algorithm
As all the localization procedures in RMLA are carried out on every sensor node, RMLA is essentially a distributed multihop localization algorithm. Relative to centralized algorithms, RMLA has the advantages that distributed algorithms possess, such as low computation complexity, less communication cost, and high network scalability. As mentioned above, RMLA is comprised of three steps, namely, trust evaluation, trust value integration, and position estimation. Their computation complexities are
For normal nodes, the computation and communication cost required in RMLA is comparable to most existing multihop localization solutions. The additional cost is in the phase of trust value integration in which the normal nodes need to receive the trust evaluation values from beacons (resulting in communication cost) and compute the integrated trust values of their multihop communication beacons (resulting in computation cost). However, relative to the entire process of multihop localization, the cost of trust value integration is lower. It is nearly equivalent to (or even smaller than) the cost required for distance modification in some improved multihop localization solutions, such as PDM [15], Hybloc [16], and BPL [22]. As described in Section 4.4, the weighted calculation of node coordinates includes iteration operations, and the computation cost of normal nodes is related to the iteration number. If requesting higher localization accuracy, we should set the threshold γ a smaller value, which will increase the iteration number and further raise the computation cost. Otherwise, we can set γ a bigger value. Empirically, we could get a better tradeoff between computation cost and localization accuracy of RMLA when
5. Performance Evaluation
In this section, we conduct extensive simulations to study the performance of the proposed RMLA algorithm. All simulations are run in MatLab. Figure 4 shows a typical realization of 3D WSN with a number of UBs. The solid pentagrams “ ”, hollow pentagrams “
”, hollow pentagrams “ ”, and solid dots “●” represent reliable beacons, unreliable beacons, and normal nodes, respectively. The default network configuration parameters are shown in Table 1. Unless specified, we use the default parameters in simulations.
”, and solid dots “●” represent reliable beacons, unreliable beacons, and normal nodes, respectively. The default network configuration parameters are shown in Table 1. Unless specified, we use the default parameters in simulations.
Default network configuration parameters.


Network topology (isotropic network).
We first compare the average localization errors (ALEs) of the traditional multihop localization method without trust evaluation (abbrevd. t-Multihop) in which Taylor-series least squares solver is also used to compute nodes' coordinates, the proposed algorithm with average method (abbrevd. RMLA1) and the proposed algorithm with enhanced D-S combination rule (abbrevd. RMLA2). Then, we present the accuracy comparison results of our RMLA methods and other typical localization algorithms (PDM, 4-Multihop, i-Multihop, and MDS-MAP). To reduce the influence of outliers, we run each simulation 100 times and take the average results as the final data points. The ALE is normalized by the nodes' communication (or ranging) radius R:

5.1. Distribution of Node Localization Errors
Firstly, we analyze the distribution of node localization errors in the default environments. Figure 5 with log-scale y-axis presents the distribution boxplots of node localization errors. It can be seen that the localization performance of t-Multihop method is much affected by UBs. t-Multihop gives an average error of 50.24% and a median error of 44.37%, and its maximum outlier even reaches 254.92%. Compared with t-Multihop, both RMLA1 and RMLA2 have significant improvement in localization accuracy. Among them, RMLA2 performs better. Its average, median, and maximum errors are respectively 28.54%, 27.64%, and 68.18% (compared with 35.35%, 32.17%, and 103.72% of RMLA1). As RMLA1 employs the simple average method to calculate the integrated trust values of beacons, its evaluation results are worse than those of RMLA2, which further leads to the reduction of its localization accuracy. However, the performance of RMLA1 is much better than that of t-Multihop.
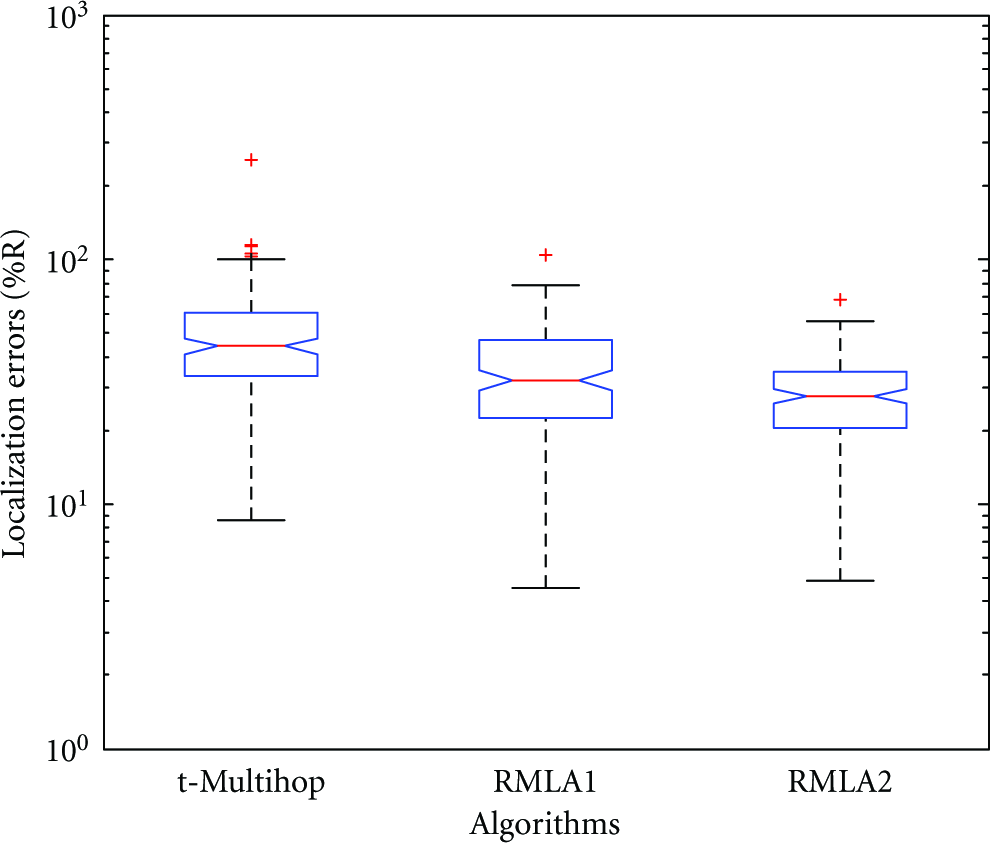
Distribution boxplots of node localization errors.
5.2. Impact of UB Number
In this part, we investigate the effects of UB number on localization accuracies of t-Multihop, RMLA1, and RMLA2. The statistics for ALEs of three methods is shown in Figure 6. With the increase of UB number, the ALEs of t-Multihop and RMLA1 rise obviously, while that of RMLA1 remains stable (nearly a horizontal line when the UB number is no more than 11). When there are 5 UBs, the ALE of t-Multihop is more than 40% (compared with about 30% of both RMLA methods). The performance of RMLA1 is almost the same as that of RMLA2 when UBs are less (no more than 5). However, the ALE of RMLA1 exceeds 40% when UB number reaches 10, while that of RMLA2 is still about 30%. Therefore, RMLA2 is more robust to UBs for WSN multihop localization, especially there are more UBs. When UB number is 12 (i.e., 40% of beacons are unreliable), the ALE of RMLA2 is still less than 40% of nodes' communication radius.

ALE versus UB number.
5.3. Impact of Network Connectivity
We vary nodes' communication radius and get the accuracy comparisons of three methods under different network connectivity, ranging from 11 to 23 (see Figure 7). Generally, the probability that a shortest path between a pair of nodes is close to a straight line grows as the node densities increase, which directly results in the improvement of localization accuracy. So the ALEs of three methods decline with the network connectivity increasing. But both RMLA methods always produce more accurate results. Compared with t-Multihop, RMLA1 and RMLA2 improve the localization accuracy by at least 13% and 17%, respectively. When the network connectivity is 11, the accuracy improvement of RMLA2 even reaches more than 25%. In RMLA, through trust evaluation among nodes, the beacons (reliable or unreliable) with low local densities to which the shortest paths are generally winding lines would be given lower trust degrees, which further lowers the influence of multihop distance estimation errors on node localization. Therefore, the RMLA algorithm also has positive effects on dealing with the uncertainties in multihop estimative distances.
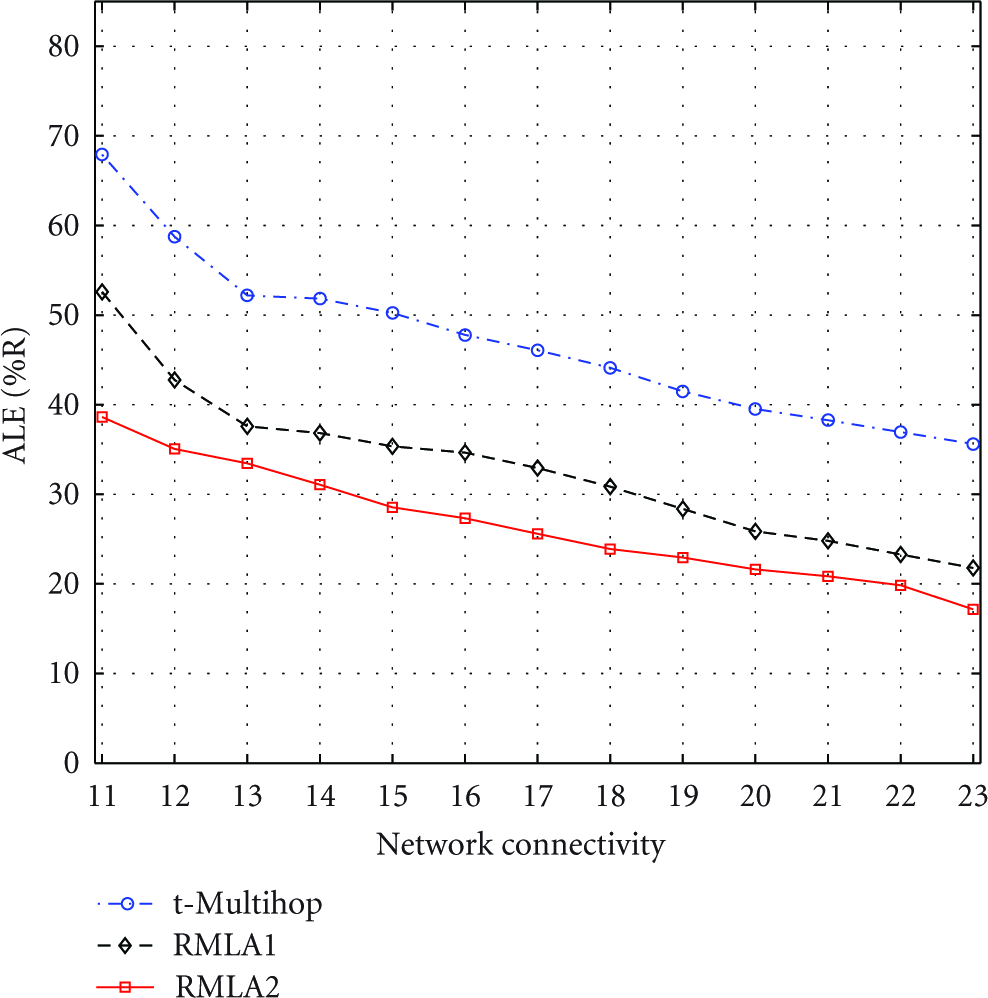
ALE versus network connectivity.
5.4. Impact of Ranging Error
Figure 8 shows the comparison results of ALEs under different standard derivations λ of ranging errors. It can be seen that both RMLA methods always perform much better than t-Multihop. The accuracy improvements of RMLA1 and RMLA2 are respectively about 15% and more than 20%. When
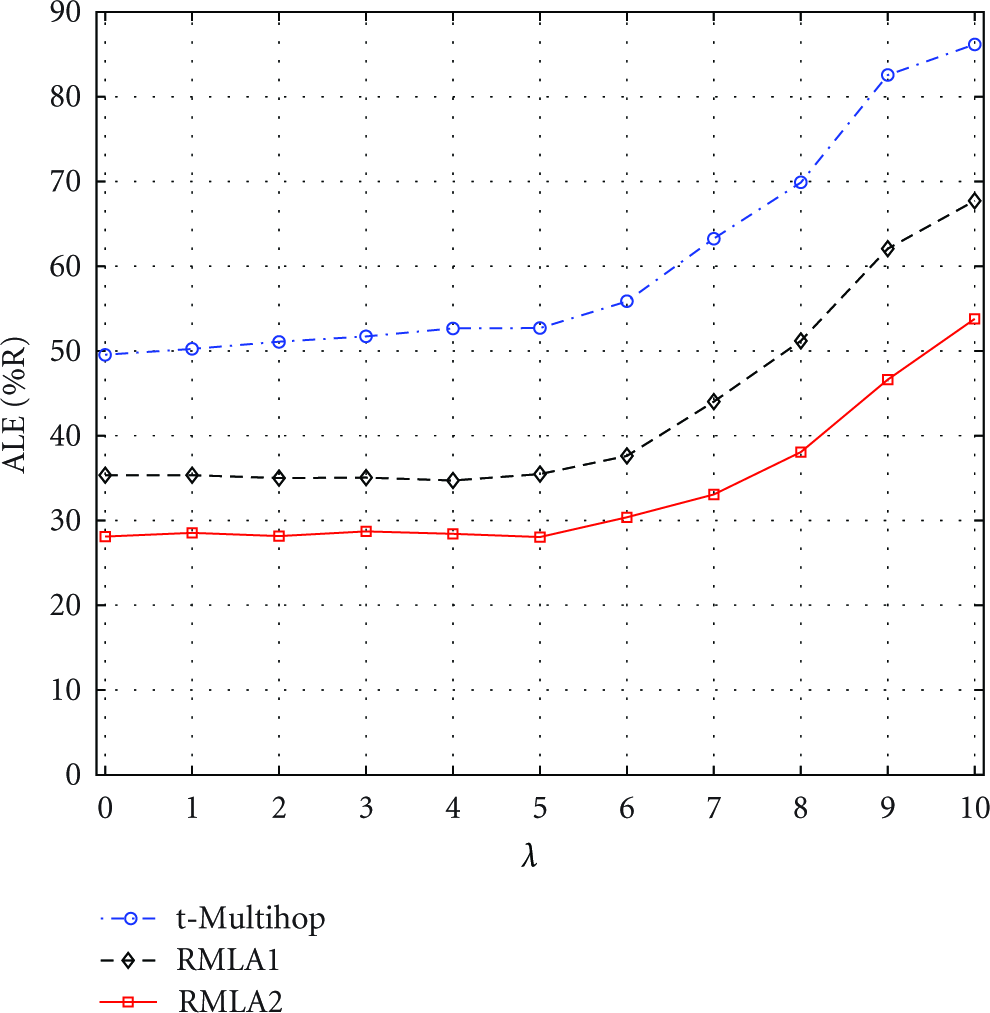
ALE versus ranging error.
5.5. Impact of Network Topology
In this part, we analyze the impact of irregular network topology on the performance of three methods. Figure 9 shows a typical anisotropic network in which sensor nodes are randomly distributed in a C-shape spatial area. We still use the default parameters in Table 1. The only difference is that the value of TTL is set to 4 for longer shortest paths are more susceptible to concave shapes. Figure 10 presents the result of accuracy comparisons. Since the shortest path between pairwise distant nodes in irregular networks is generally more winding than that in uniform networks, the ALEs of three methods in Figure 10 are bigger than those in Figure 6. However, RMLA still performs consistently much better than t-Multihop. Compared with RMLA2, the irregular network topology has more significant influence on the performance of RMLA1 and t-Multihop of which the ALEs rise sharply with UB number increasing. When the UB number is no more than 10, the ALE curve of RMLA2 approaches to a horizontal line (always less than 40%). When the UB number reaches 11, the accuracy of RMLA2 begins to decrease markedly, but it is still superior to those of RMLA1 and t-Multihop.

Network topology (anisotropic network).

ALE versus UB number (anisotropic network).
5.6. Comparison of RMLA and Other Typical Algorithms
Finally, we evaluate the localization performance of RMLA by comparing it with three typical multihop algorithms (1) the 4-Multihop algorithm [14], (2) the PDM algorithm [15], (3) the i-Multihop algorithm [18], and one representative centralized algorithm, MDS-MAP [12], in the isotropic network shown in Figure 4 and the anisotropic network shown in Figure 9. Figures 11–13 present the comparison results when the UB ratios are 0%, 10%, and 20%, respectively (i.e., the UB numbers are 0, 3, and 6). As can be seen from Figure 11, when there is no UB, i-Multihop gives the best accuracy, PDM comes second, and MDS-MAP performs the worst. In isotropic networks, the ALEs of RMLA1, RMLA2, t-Multihop, and 4-Multihop are nearly equivalent (about 27%), while in anisotropic networks the ALE of 4-Multihop is about 4% lower than those (about 29%) of the other three algorithms. When 10% UBs exist in WSNs (see Figure 12), the performance of PDM declines most significantly (its ALEs in both networks are more than 60%). This is because the erroneous information provided by UBs severely affects the feature extraction of PDM, which further leads to the failure of multihop localization. 4-Multihop and i-Multihop also have a marked decrease in accuracy, especially in anisotropic networks. In Figure 12, RMLA2 performs the best, and its accuracy is comparable with that in Figure 11. MDS-MAP is less affected by UBs, but its ALE is still much higher than those of the other algorithms except PDM. With the increase of UB number, the advantage of RMLA2 becomes more obvious (see Figure 13). In isotropic networks, compared with 4-Multihop, PDM, i-Multihop, and MDS-MAP, it can improve localization accuracy by 48%, 88%, 29%, and 20%, respectively. In anisotropic networks, the gaps can reach 38%, 89%, 57%, and 52%. From Figures 11–13, we can conclude that the RMLA algorithms have better performance in resistance against UBs than the other five solutions. It is worth noting that RMLA2 is more efficient in anisotropic networks.
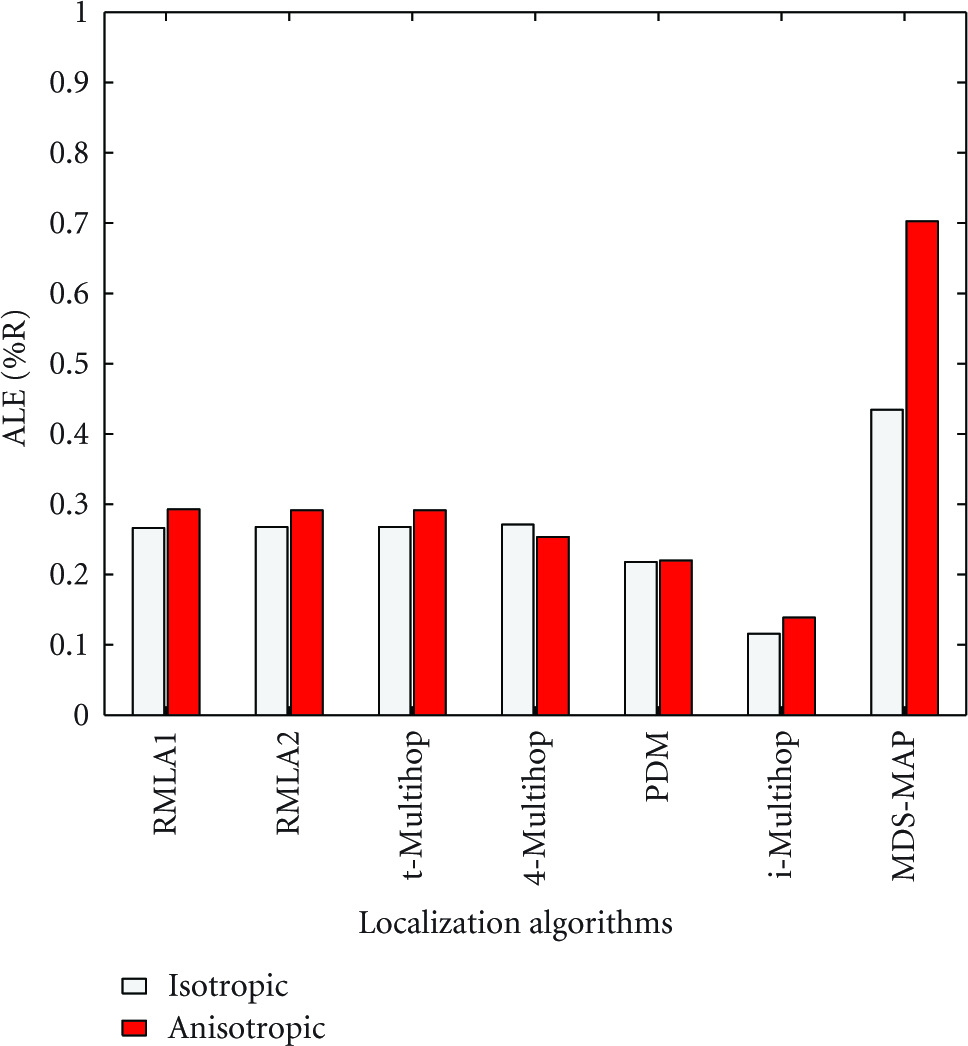
Performance comparison of various algorithms (no UB).

Performance comparison of various algorithms (10% UBs).

Performance comparison of various algorithms (20% UBs).
6. Conclusions
In this paper, we address the problem of node multihop localization in large-scale wireless sensor networks with unreliable beacons. Based on trust evaluation and evidence theory, we present a robust multihop localization algorithm, called RMLA, which is shown to be able to effectively mitigate the influence of UBs on the position estimation of normal nodes and improve WSN localization accuracy. In the phase of evidence combination, both the average method and the enhanced D-S combination method can be utilized to calculate the integrated trust values of beacons. The average method is simple and requires less computation cost, it is very suitable to sensor nodes with low computing power. As the D-S method makes full use of the uncertainty information in trust evaluation values, it produces more accurate results than the average method, especially there are more UBs in WSNs. In practice, we should make a reasonable tradeoff between localization accuracy and computation cost to determine which method to be adopted. Through simulations, we demonstrate that RMLA performs much better than some existing localization solutions. In isotropic networks, RMLA could achieve robust multihop localization even if 40% of beacons are unreliable. In anisotropic networks, the ratio can also reach more than 30%. Additionally, RMLA has the advantages in resistance against uncertainties in both multihop estimative distances and direct ranging results. In our future work, we will construct a more accurate BPA function related to specific network environment and implement the RMLA algorithm on experimental WSN prototypes to verify its practicability.
Footnotes
Acknowledgments
The authors would like to thank the anonymous reviewers for their comments. This paper is supported by the National Natural Science Foundation of China (NSFC) under Grants no. 60974121 and no. 61001138.